
Control of DC Motors to Guide Unmanned Underwater Vehicles


Abstract
:1. Introduction
- Can deterministic artificial intelligence (D.A.I.) be successfully applied to DC motors as has recently been accomplished in spacecraft and unmanned underwater vehicles?
- How does the control of DC motors with D.A.I. compare to the performance of indirect and direct self-tuning regulators (with variations of modeling to include plant cancellations and disparate pole excesses)?
- Can implementation of D.A.I. aid target tracking of challenging square wave trajectories superior to the cited nonlinear adaptive control techniques (self-tuning regulators and model-reference adaptive controllers)?
2. Materials and Methods
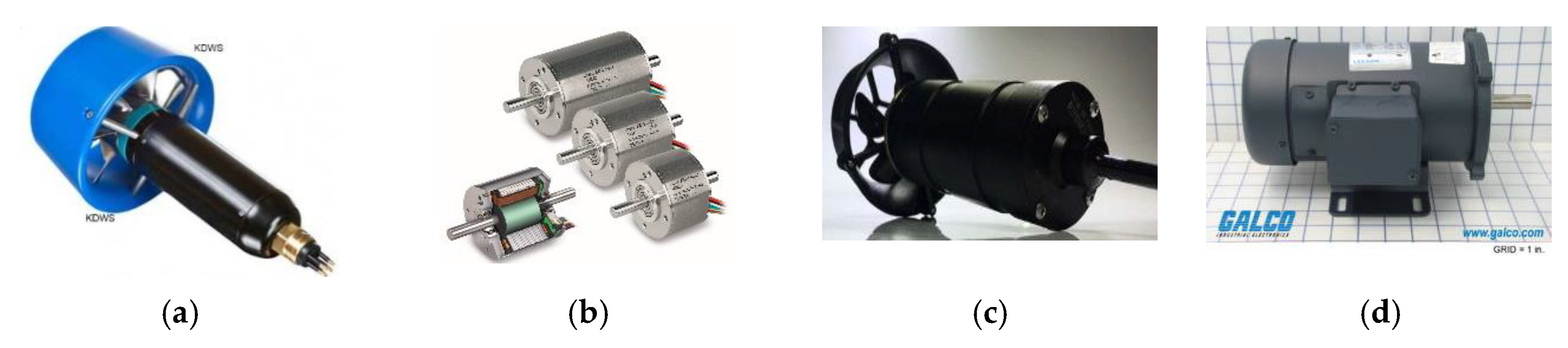
2.1. DC Motor Modeling
2.2. Analytic (Autonomous) Trajectory Generation
- MATLAB’s Sine Function
- 4th Order Taylor Series Approximation
- Low Precision Approximation Algorithm
- High Precision Approximation Algorithm
2.3. Deterministic A.I.: Self-Awareness Statements Using Analytic Trajectory and Optimal Learning
- Initialize the vector of unknowns per Equation (9) to assert self-awareness Equation (7) or Equation (8) as the control, where is formulated using the desired (analytic) trajectory.
- Propagate state to in Equation (11).
- Use values of (not ) and in RLS (not presented here) to optimally estimate/learn/update , to propagate errors projected on system matrix (not ).
- Apply in Equation (7) or Equation (8) with the optimally learned estimates .
3. Results
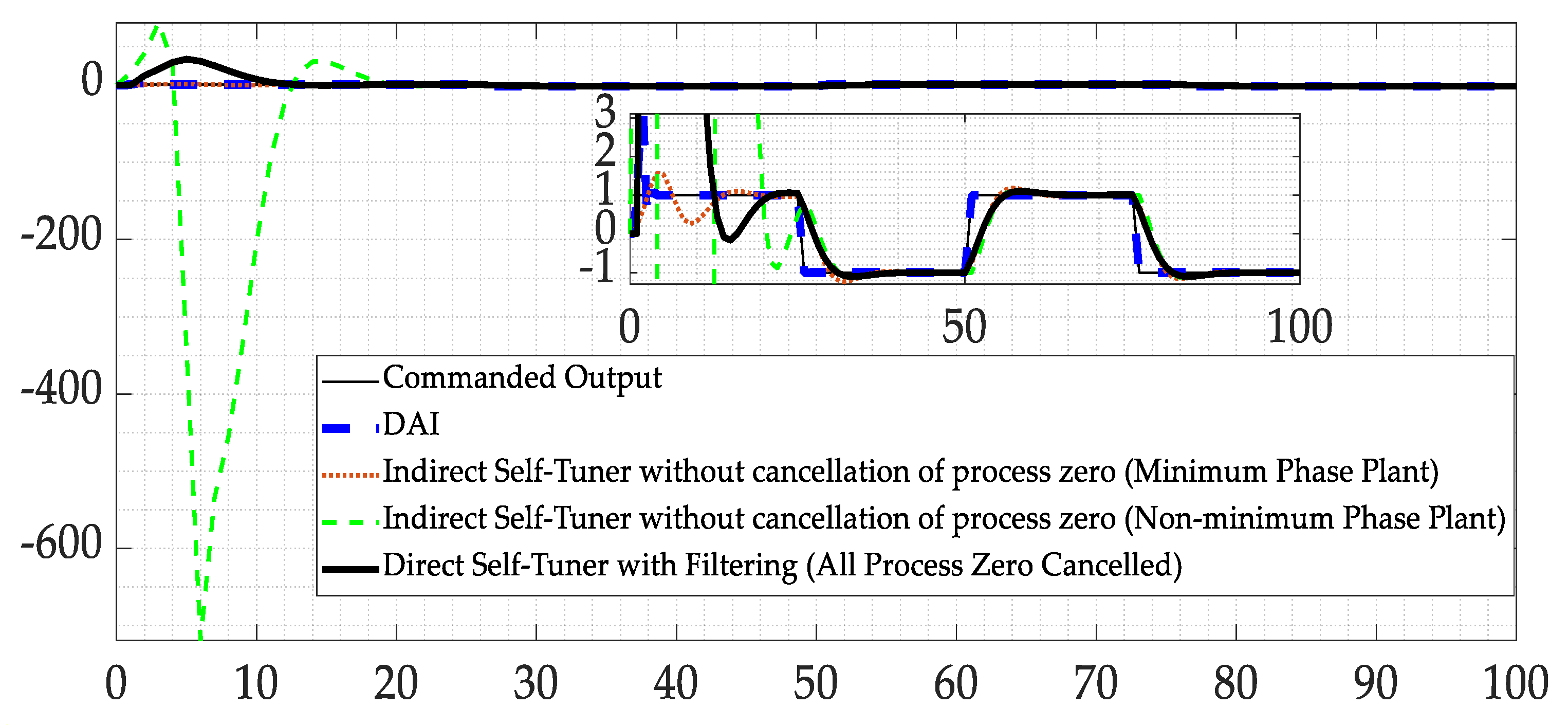
- Indirect self-tuner without process zero cancellation (minimum phase plant).
- Indirect self-tuner without process zero cancellation (non-minimum phase plant model assumed).
- Direct self-tuner with filtering (all process zeros cancelled).
- Deterministic artificial intelligence.
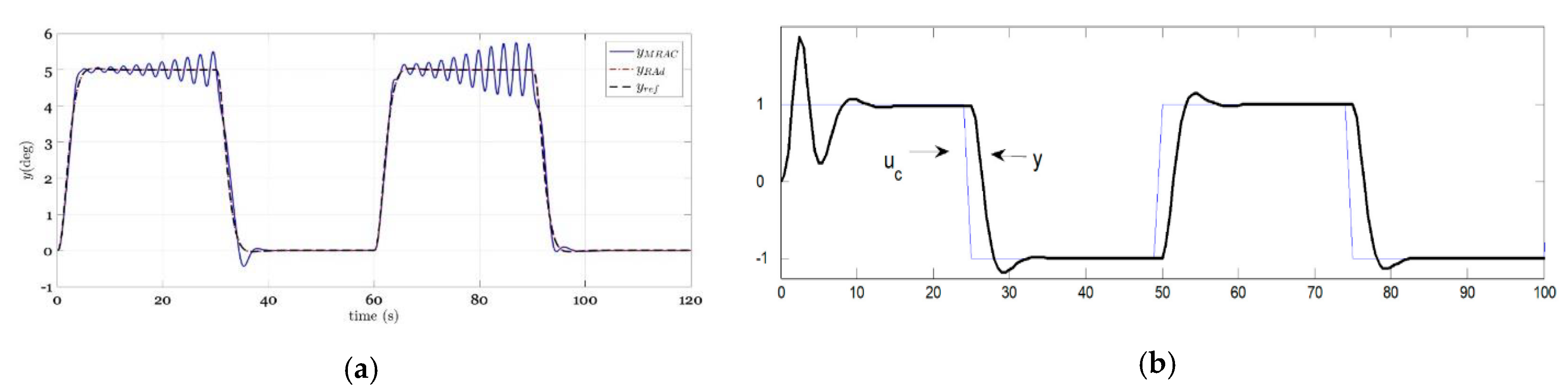
3.1. Indirect Self-Tuner without Process Zero Cancellation (Minimum Phase Plant)
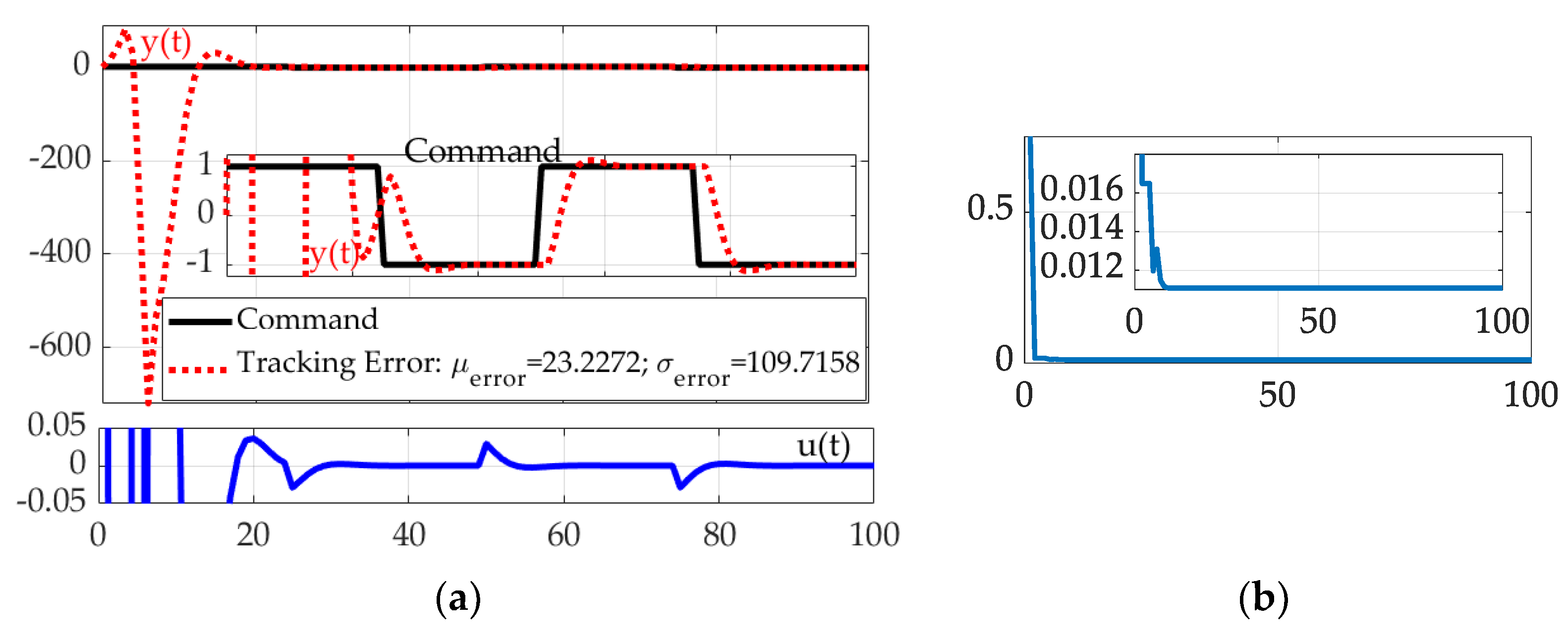
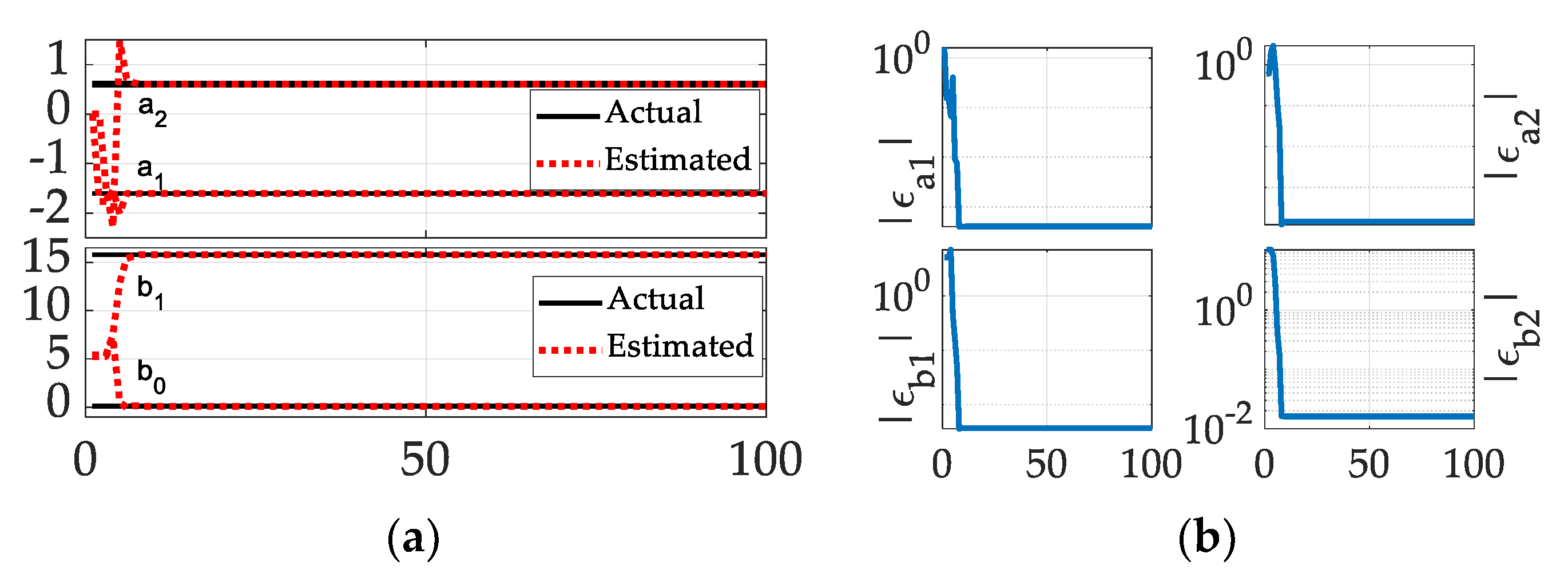
3.2. Indirect Self-Tuner without Process Zero Cancellation (Non-Minimum Phase Plant Model Assumed)
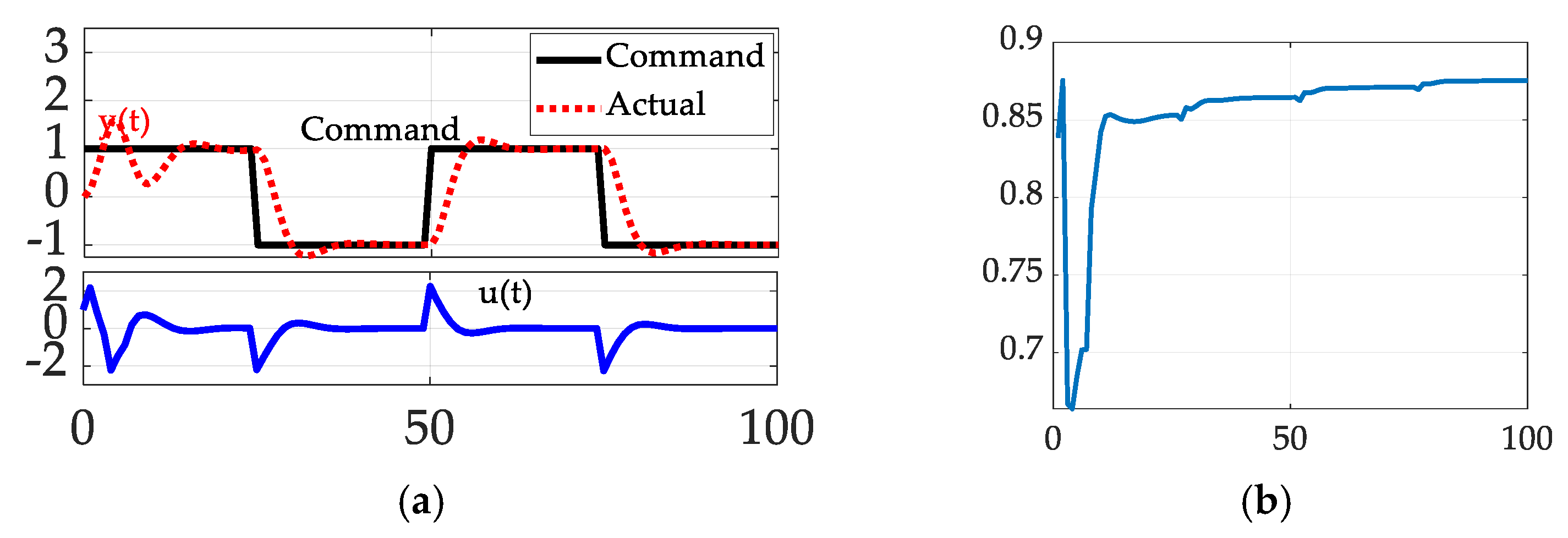
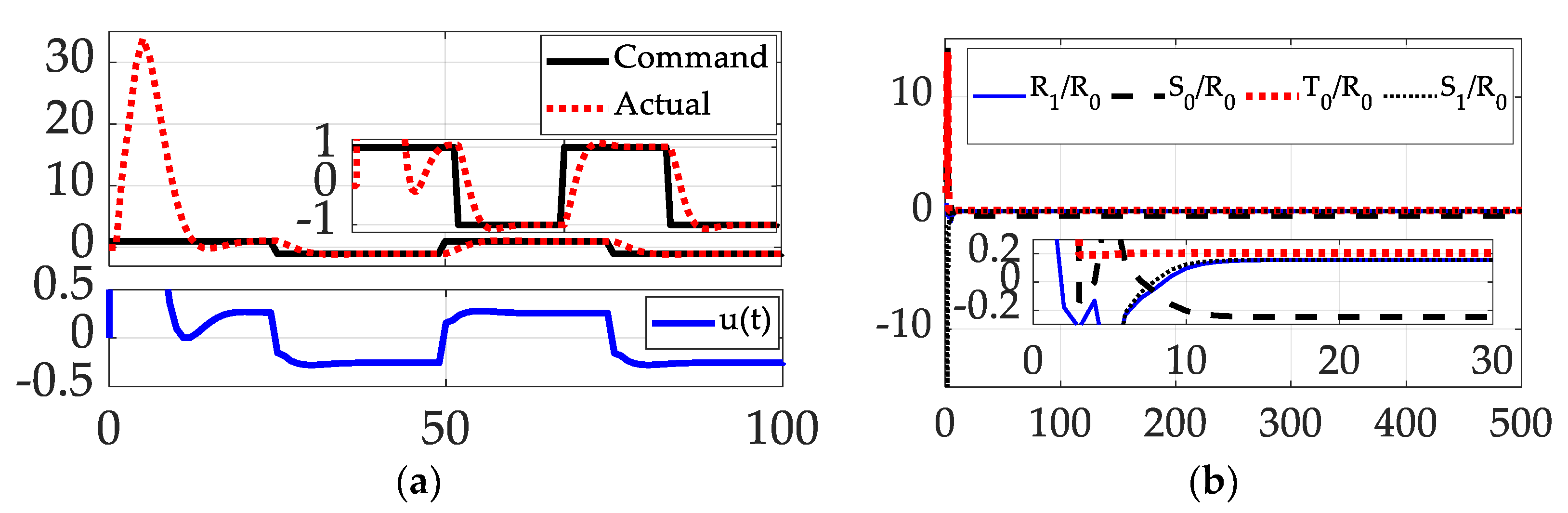
3.3. Direct Self-Tuner with Filtering (All Process Zeros Cancelled)
- Terms in denominator polynomial A to be found by the estimator.
- Remaining terms of denominator polynomial A.
- Terms left over after factoring numerator polynomial .
- Gain term plus terms we can’t cancel in numerator polynomial B.
- Output polynomial of the controller.
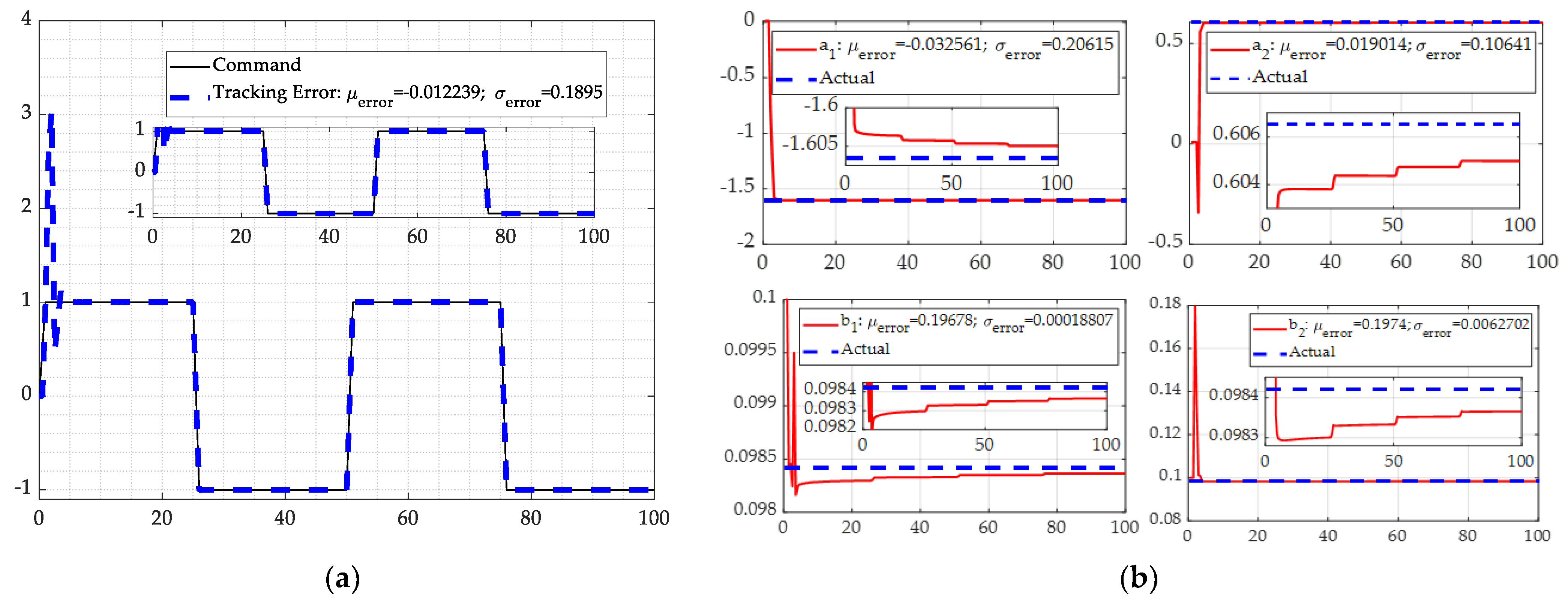
3.4. Deterministic Artificial Intelligence
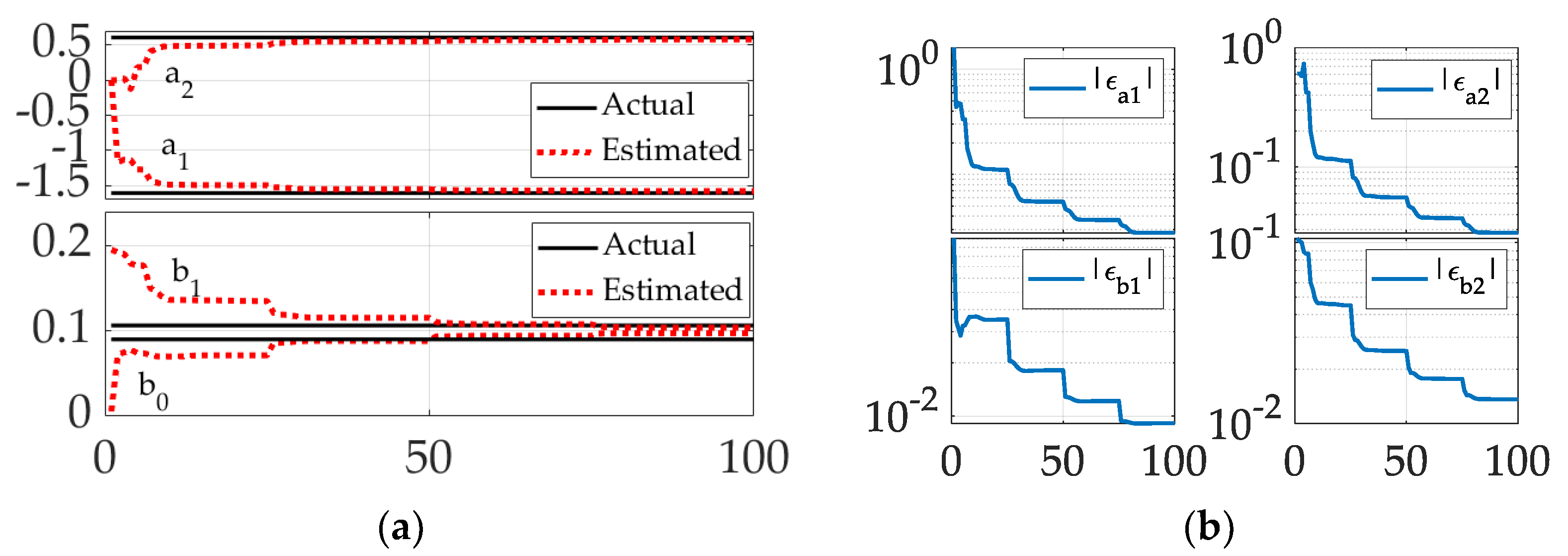
3.5. Comparison of Estimation Accuracy
3.6. Persistent Excitation
3.7. Trajectory Tracking Performance Comparison
4. Discussion
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gauss, K. Theory of the Motion of the Heavenly Bodies; Dover: New York, NY, USA, 1963. [Google Scholar]
- Bierman, G. Factorization Methods for Discrete Sequential Estimation; Academic Press: New York, NY, USA, 1977. [Google Scholar]
- Kalman, R. Design of a self-optimizing control system. Trans. ASME 1958, 80, 468–478. [Google Scholar]
- Peterka, V. Adaptive digital regulation of noisy systems. In Preprints of the 2nd IFAC Symposium on Identification and Process Parameter Estimation; UTIA ČSAV: Prague, Czech Republic, 1970; p. 62. [Google Scholar]
- Wieslander, J.; Wittenmark, B. An approach to adaptive control using real time identification. Automatica 1971, 7, 211–217. [Google Scholar] [CrossRef]
- Åström, K.; Wittenmark, B. On the Control of Constant but Unknown Systems; 5th IFAC World Congress: Paris, France, 1972. [Google Scholar]
- Åström, K.; Wittenmark, B. On self-tuning regulators. Automatica 1973, 9, 185–199. [Google Scholar] [CrossRef]
- Åström, K.; Wittenmark, B. Adaptive Control; Addison-Wesley: Boston, FL, USA, 1995; pp. 43, 48, 63–65, 331. [Google Scholar]
- Slotine, J.; Weiping, L.W. Applied Nonlinear Control; Prentice-Hall: London, UK, 1991; pp. 331, 365. [Google Scholar]
- Sands, T. Space System Identification Algorithms. J. Space Explor. 2018, 6, 138. [Google Scholar]
- Sands, T. Nonlinear-Adaptive Mathematical System Identification. Computation 2017, 5, 47. [Google Scholar] [CrossRef] [Green Version]
- Rubaai, A.; Kotaru, R. Online identification and control of a DC motor using learning adaptation of neural networks. IEEE Trans. Ind. Appl. 2000, 36, 935–942. [Google Scholar] [CrossRef]
- Liu, Z.; Zhuang, X.; Wang, S. Speed Control of a DC Motor using BP Neural Networks. In Proceedings of the 2003 IEEE Conference on Control Applications, Istanbul, Turkey, 25–25 June 2003; pp. 832–835. [Google Scholar]
- Mishra, M. Speed Control of DC Motor Using Novel Neural Network Configuration. Bachelor’s Thesis, National Institute of Technology, Rourkela, India, 2009. [Google Scholar]
- Hernández-Alvarado, R.; García-Valdovinos, L.G.; Salgado-Jiménez, T.; Gómez-Espinosa, A.; Fonseca-Navarro, F. Neural Network-Based Self-Tuning PID Control for Underwater Vehicles. Sensors 2016, 16, 1429. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hussein, A.; Gaber, M.M.; Elyan, E.; Jayne, C. Imitation learning: A survey of learning methods. ACM Comput. Surv. 2017, 50, 21. [Google Scholar] [CrossRef]
- Dessort, R.; Chucholowski, C. Explicit model predictive control of semi-active suspension systems using Artificial Neural Networks (ANN). In 8th International Munich Chassis Symposium 2017; Pfeffer, P.E., Ed.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2017; pp. 207–228. [Google Scholar]
- Wei, B. Adaptive Control Design and Stability Analysis of Robotic Manipulators. Actuators 2018, 7, 89. [Google Scholar] [CrossRef] [Green Version]
- Rashwan, A. An Indirect Self-Tuning Speed Controller Design for DC Motor Using A RLS Principle. In Proceedings of the 21st International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 17–19 December 2019; pp. 633–638. [Google Scholar]
- Cursi, F.; Mylonas, G.P.; Kormushev, P. Adaptive Kinematic Modelling for Multiobjective Control of a Redundant Surgical Robotic Tool. Robotics 2020, 9, 68. [Google Scholar] [CrossRef]
- Dengler, C.; Lohmann, B. Adjustable and Adaptive Control for an Unstable Mobile Robot Using Imitation Learning with Trajectory Optimization. Robotics 2020, 9, 29. [Google Scholar] [CrossRef]
- Li, W.; Zhang, C.; Gao, W.; Zhou, M. Neural Network Self-Tuning Control for a Piezoelectric Actuator. Sensors 2020, 20, 3342. [Google Scholar] [CrossRef] [PubMed]
- Dini, P.; Saponara, S. Design of Adaptive Controller Exploiting Learning Concepts Applied to a BLDC-Based Drive System. Energies 2020, 13, 2512. [Google Scholar] [CrossRef]
- Cooper, M.; Heidlauf, P.; Sands, T. Controlling Chaos—Forced van der Pol Equation. Mathematics 2017, 5, 70. Available online: https://www.mdpi.com/2227–7390/5/4/70 (accessed on 17 January 2021).
- Lobo, K.; Lang, J.; Starks, A.; Sands, T. Analysis of Deterministic Artificial Intelligence for Inertia Modifications and Orbital Disturbance. Int. J. Control Sci. Eng. 2018, 8, 53. [Google Scholar]
- Baker, K.; Cooper, M.; Heidlauf, P.; Sands, T. Autonomous trajectory generation for deterministic artificial intelligence. Electr. Electron. Eng. 2018, 8, 59. [Google Scholar]
- Smeresky, B.; Rizzo, A.; Sands, T. Optimal Learning and Self-Awareness Versus PDI. Algorithms 2020, 13, 23. [Google Scholar] [CrossRef] [Green Version]
- Sands, T. Development of deterministic artificial intelligence for unmanned underwater vehicles (UUV). J. Mar. Sci. Eng. 2020, 8, 578. [Google Scholar] [CrossRef]
- Sands, T.; Bollino, K.; Kaminer, I.; Healey, A. Autonomous Minimum Safe Distance Maintenance from Submersed Obstacles in Ocean Currents. J. Mar. Sci. Eng. 2018, 6, 98. [Google Scholar] [CrossRef] [Green Version]
- Sands, T. (Ed.) Deterministic Artificial Intelligence; IntechOpen: London, UK, 2020; ISBN 978-1-78984-111-4. [Google Scholar]
- Chen, J.; Wang, J.; Wang, W. Robust Adaptive Control for Nonlinear Aircraft System with Uncertainties. Appl. Sci. 2020, 10, 4270. [Google Scholar] [CrossRef]
- AliExpress DC Motor. Available online: https://www.aliexpress.com/item/32363144992.html (accessed on 18 January 2021).
- Unmanned Systems Technology DC Motor. Available online: https://www.unmannedsystemstechnology.com/2015/05/maxon-launches-high-torque-dc-brushless-motors/ (accessed on 18 January 2021).
- Maxon Motor EC-i 40 DC Motor. Available online: http://mymobilemms.com/OFFTHEGRIDWATER.CA/Brushless-Motor/RCD-MI50-Stuwkracht-5-Kg-Onderwater-Sub-DC-Motor-ROV-AUV (accessed on 18 January 2021).
- Galco Industries DC Motor. Available online: https://www.galco.com/buy/Leeson/108092.00?source=googleshopping&utm_source=adwords&utm_campaign=&gclid=EAIaIQobChMIvcHsn4Gm7gIVYiCtBh0eGQGGEAkYAiABEgKOxfD_BwE (accessed on 18 January 2021).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Estimates 1 | |||
|---|---|---|---|---|
| Indirect self-tuner without process zero cancellation (minimum phase plant) | 0.19537 | 0.1753 | ||
| −0.02096 | 0.12801 | |||
| 0.019307 | 0.01283 | |||
| −0.02905 | 0.02060 | |||
| Indirect self-tuner without process zero cancellation (non-minimum phase plant) | −0.00957 | 0.16784 | ||
| 0.051825 | 0.37542 | |||
| −0.22845 | 1.1204 | |||
| 0.42768 | 1.9589 | |||
| Direct self-tuner with filtering (all process zeros cancelled) | 0.001976 | 0.06214 | ||
| −0.03805 | 0.66009 | |||
| −0.03052 | 0.6132 | |||
| 0.039206 | 0.68119 | |||
| Deterministic artificial intelligence | −0.03256 | 0.20615 | ||
| 0.019014 | 0.10641 | |||
| 0.19678 | 0.00019 | |||
| 0.1974 | 0.00627 | |||
| Method | Tracking Error 1 | |
|---|---|---|
| Indirect self-tuner without process zero cancellation (minimum phase plant) | 0.023534 | 0.58929 |
| Indirect self-tuner without process zero cancellation (non-minimum phase plant) | 23.2272 | 109.7158 |
| Direct self-tuner with filtering (all process zeros cancelled) | −0.35445 | 2.9984 1 |
| Deterministic artificial intelligence (D.A.I.) | −0.012239 | 0.1895 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sands, T. Control of DC Motors to Guide Unmanned Underwater Vehicles. Appl. Sci. 2021, 11, 2144. https://doi.org/10.3390/app11052144
Sands T. Control of DC Motors to Guide Unmanned Underwater Vehicles. Applied Sciences. 2021; 11(5):2144. https://doi.org/10.3390/app11052144
Chicago/Turabian StyleSands, Timothy. 2021. "Control of DC Motors to Guide Unmanned Underwater Vehicles" Applied Sciences 11, no. 5: 2144. https://doi.org/10.3390/app11052144
APA StyleSands, T. (2021). Control of DC Motors to Guide Unmanned Underwater Vehicles. Applied Sciences, 11(5), 2144. https://doi.org/10.3390/app11052144