Application of Fuzzy Theory and Optimum Computing to the Obstacle Avoidance Control of Unmanned Underwater Vehicles



Abstract
:1. Introduction
2. Materials and Methods
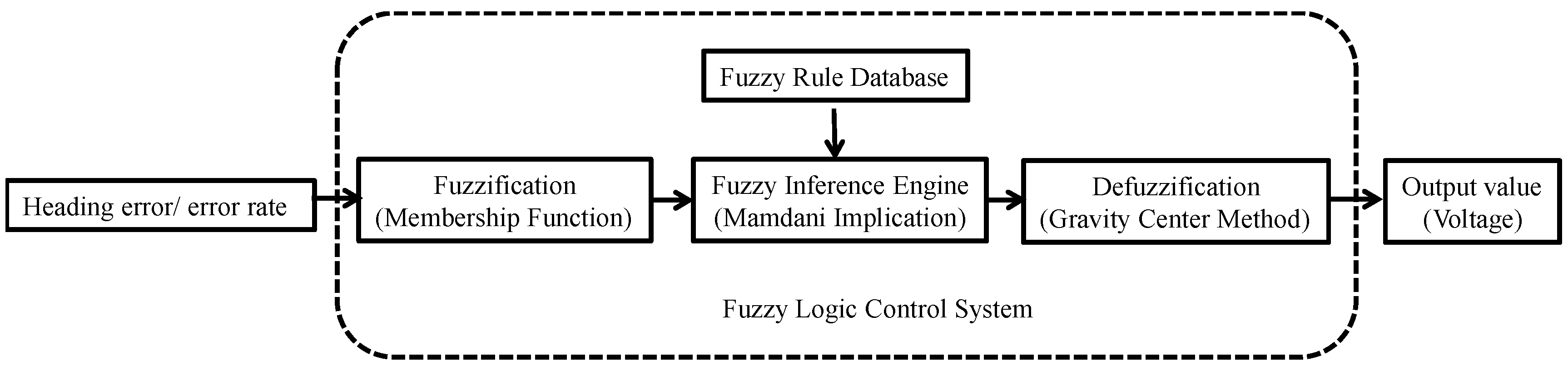
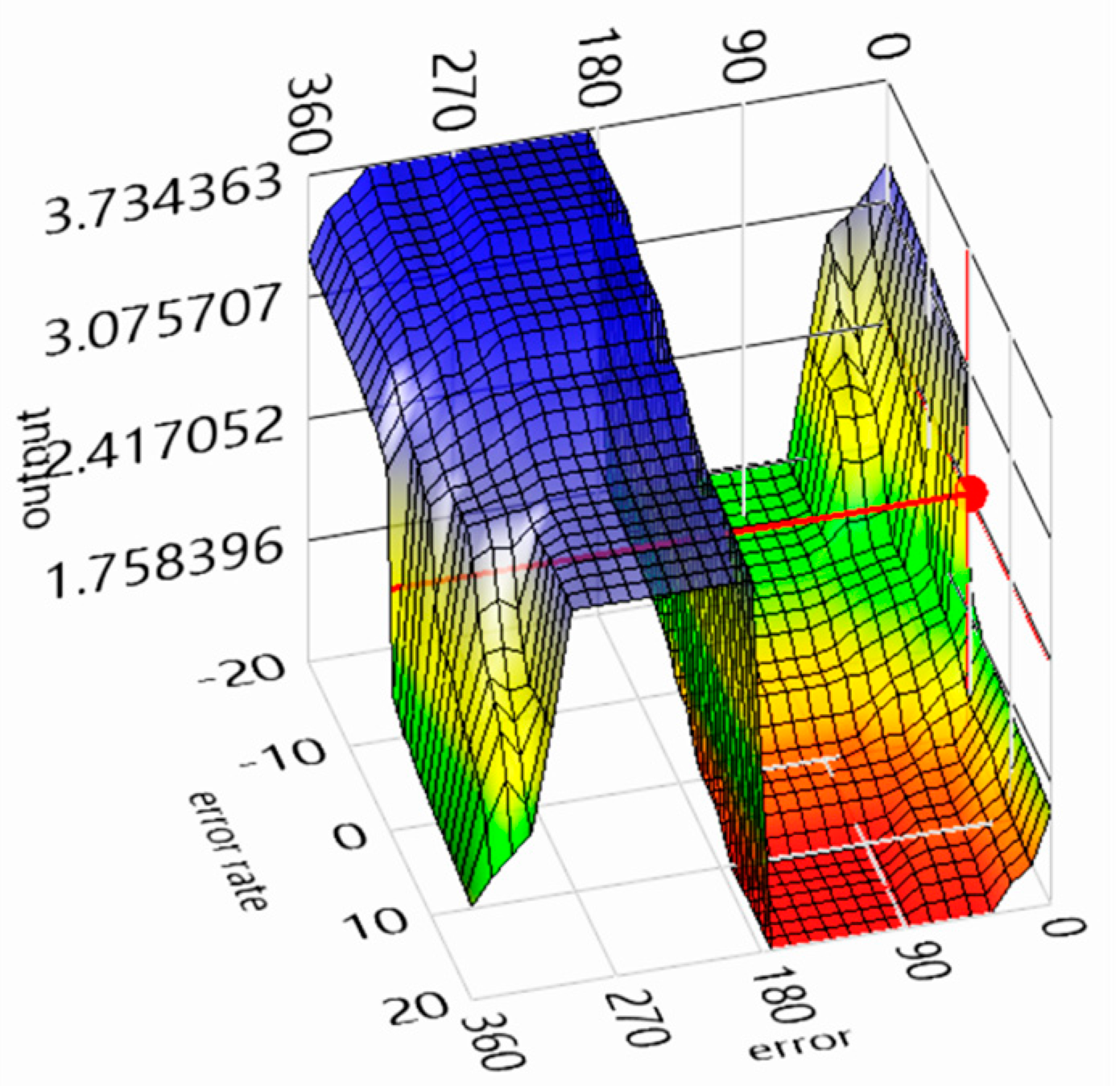
2.1. FLC
2.2. Optimum Value Computing
2.2.1. Problem Definition
- Choosing design variables: Based on the requirements of the approach, the user can choose factors as design variables. These can be varied during the optimization iteration process. Other factors are treated as constants. In this study, the chosen design variables for the obstacle avoidance approach were the number of points on the radius of the scanning sonar (), the radius of the scanning sonar (, and the sector of the scanning sonar (θ) (Figure 6).
- Defining an objective function: The objective function must be defined according to the purpose and requirements of the approach. The objective function in this study was defined as the direction of movement (DM) of the ROV:andwhere represents the distance between point P and the destination, and represents the distance between point P and the obstacle. indicates the negative inverse value of , and indicate the positive inverse value of due to the presence of n obstacles detected. If the minimum value of DM is located at point “i”, the ROV should turn to point “i” and move forward.
- Identifying constraints: Assuming that R is the radius of the scanning sonar, indicates the scanning area for the forward motion. Suggested ranges of the mentioned design variables are summarized as follows:and
2.2.2. Optimal Control Process
- Initialization of the ROV in the destination heading in degrees and the setting of a semicircular region of radius R centered at the ROV point.
- Execution of obstacle avoidance when an obstacle was detected.
- Computation of the lowest cost function value and its heading degree.
- Use of the fuzzy logic controller to make the ROV change its current heading degree to the cost function heading (degree) to avoid the obstacle.
- Updating of the ROV’s position.
2.2.3. Simulation of Single Obstacle Avoidance
3. Results
3.1. Experimental Results of Heading Control
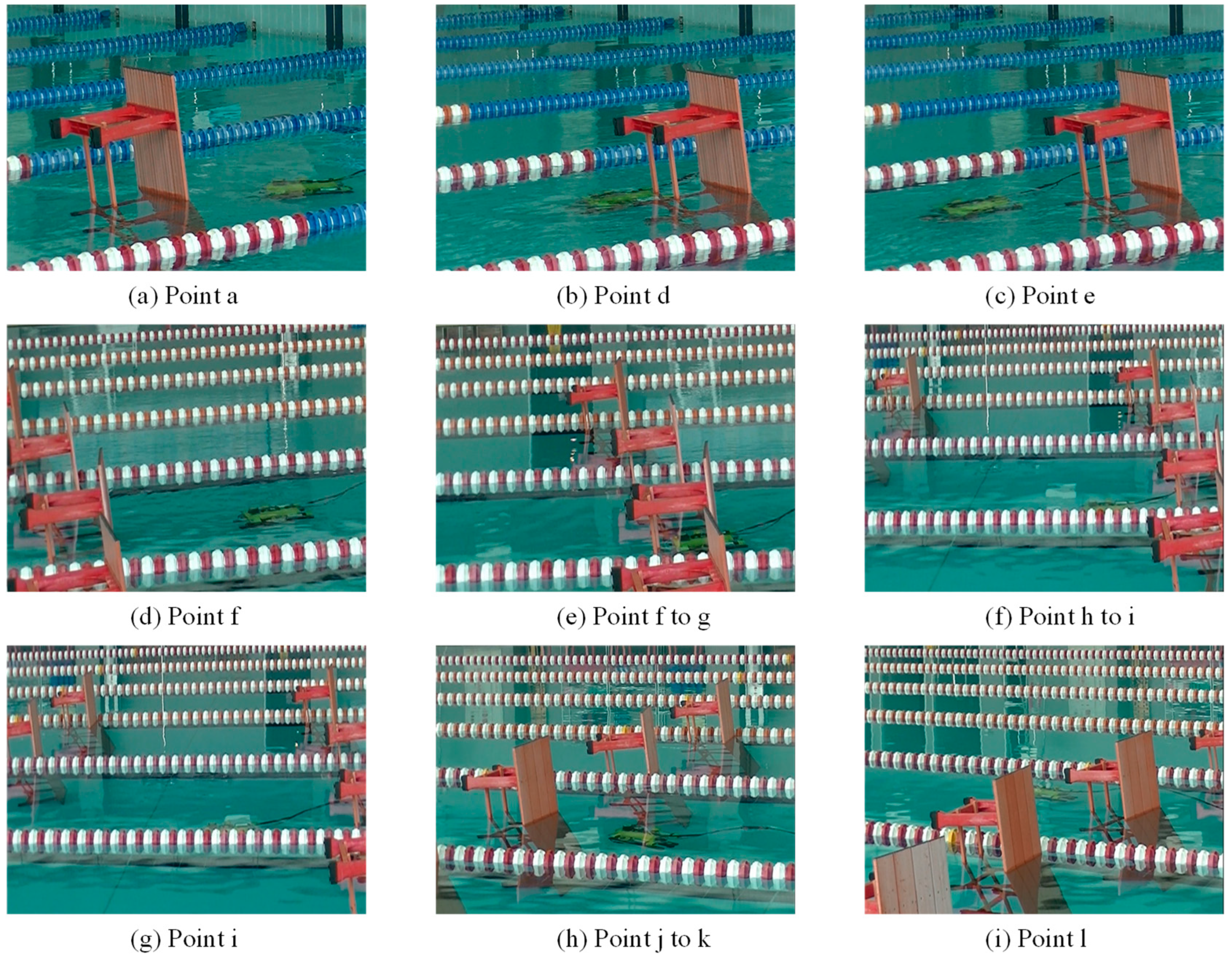
3.2. Experimental Results of the Obstacle Avoidance Approach
4. Conclusions
- For heading control in the experiment, the FLC system directly commanded the ROV’s motion according to the data sensed in the environment. It reduced dependence by using the vehicle’s motion and environment models.
- Implementation of the heading control was more difficult because of the evident hydrodynamic force generated by the ROV’s motors, which caused a yaw phenomenon. The FLC required time to stabilize the ROV.
- In the obstacle avoidance experiment, the sonar sensor with optimum value computing combined with fuzzy logic control allowed for efficient avoidance of the obstacles and movement to the target destination. This would be helpful for the navigation control of UUVs.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Nørve Eidsvik, O.A.; Schjølberg, I. Finite element cable-model for Remotely Operated Vehicles (ROVs) by application of beam theory. Ocean. Eng. 2018, 163, 322–336. [Google Scholar] [CrossRef] [Green Version]
- Humphris, S.E. Vehicles for Deep Sea Exploration. In Elements of Physical Oceanography: A Derivative of the Encyclopedia of Ocean Sciences; Steele, J.H., Thorpe, S.A., Thompson, K.K., Eds.; Elsevier Ltd.: Boston, MA, USA, 2009; pp. 197–210. [Google Scholar]
- Hassanein, O.; Anavatti, S.G.; Ray, T. On-line adaptive fuzzy modeling and control for autonomous underwater vehicle. In Recent Advances in Robotics and Automation; Springer: Berlin/Heidelberg, Germany, 2013; pp. 57–70. [Google Scholar]
- Nag, A.; Patel, S.S.; Akbar, S.A. Fuzzy logic based depth control of an autonomous underwater vehicle. In Proceedings of the 2013 International Mutli-Conference on Automation, Computing, Communication, Control and Compressed Sensing, Kottayam, Kerala, India, 22–23 March 2013; pp. 117–123. [Google Scholar]
- Shi, X.; Chen, J.; Yan, Z.; Li, T. Design of AUV height control based on adaptive Neuro-fuzzy inference system. In Proceedings of the 2010 IEEE International Conference on Information and Automation, Harbin, China, 20–23 June 2010; pp. 1646–1651. [Google Scholar]
- Chen, J.W.; Zhu, H.; Zhang, L.; Sun, Y. Research on fuzzy control of path tracking for underwater vehicle based on genetic algorithm optimization. Ocean. Eng. 2018, 156, 217–223. [Google Scholar] [CrossRef]
- Joo, M.G. A controller comprising tail wing control of a hybrid autonomous underwater vehicle for use as an underwater glider. Int. J. Nav. Archit. Ocean. Eng. 2019, 11, 865–874. [Google Scholar] [CrossRef]
- Lin, X.; Nie, J.; Jiao, Y.; Liang, K.; Li, H. Adaptive fuzzy output feedback stabilization control for the underactuated surface vessel. Appl. Ocean. Res. 2018. [Google Scholar] [CrossRef]
- Makavita, C.D.; Jayasinghe, S.G.; Nguyen, H.D.; Ranmuthugala, D. Experimental Study of a Command Governor Adaptive Depth Controller for an Unmanned Underwater Vehicle. Appl. Ocean. Res. 2019. [Google Scholar] [CrossRef]
- Bui, L.D.; Kim, Y.G. An obstacle-avoidance technique for autonomous underwater vehicles based on BK-products of fuzzy relation. Fuzzy Sets Syst. 2006, 157, 560–577. [Google Scholar] [CrossRef]
- Shimmin, D.W.; Stephens, M.; Swainston, J.R. Adaptive control of a submerged vehicle with sliding fuzzy relations. Fuzzy Sets Syst. 1996, 79, 15–24. [Google Scholar] [CrossRef]
- Wang, D.; Wang, P.; Zhang, X.; Guo, X.; Shu, Y.; Tian, X. An obstacle avoidance strategy for the wave glider based on the improved artificial potential field and collision prediction model. Ocean. Eng. 2020, 206, 107356. [Google Scholar] [CrossRef]
- Sebastián, V.A. Artificial potential fields for the obstacles avoidance system of an AUV using a mechanical scanning sonar. In Proceedings of the 2016 3rd IEEE/OES South American International Symposium on Oceanic Engineering, Buenos Aires, Argentina, 15–17 June 2016; pp. 1–6. [Google Scholar]
- Subramanian, S.; George, T.; Thondiyath, A. Obstacle avoidance using multi-point potential field approach for an underactuated flat-fish type AUV in dynamic environment. In International Conference on Intelligent Robotics, Automation, and Manufacturing; Springer: Berlin/Heidelberg, Germany, 2012; pp. 20–27. [Google Scholar]
- Braginsky, B.; Guterman, H. Obstacle avoidance approaches for autonomous underwater vehicle: Simulation and experimental results. IEEE J. Ocean. Eng. 2016, 41, 882–892. [Google Scholar] [CrossRef]
- Grefstad, Ø.; Schjølberg, I. Navigation and collision avoidance of underwater vehicles using sonar data. In Proceedings of the 2018 IEEE/OES Autonomous Underwater Vehicle Workshop, Porto, Portugal, 6–9 November 2018; pp. 1–6. [Google Scholar]
- Klir, G.J. Fuzzy Set Theory; Wiley-IEEE Press: Piscataway, NJ, USA, 2006. [Google Scholar]
- Arora, J.S. Introduction to Optimum Design; Elsevier: Cambridge, MA, USA, 2016. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Heading Error Rate | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| LB | LM | LS | LVS | Zero | RVS | RS | RM | RB | ||
| Heading error | RVB | LVS | LS | LMS | LMB | LMB | LB | LB | LVB | LVB |
| RB | LVS | LVS | LS | LMS | LMB | LMB | LB | LB | LVB | |
| RM | RVS | LVS | LVS | LS | LMS | LMB | LMB | LB | LVB | |
| RS | Zero | LVS | LVS | LVS | LS | LMS | LMB | LMB | LB | |
| RVS | RS | RVS | Zero | LVS | LVS | LS | LMS | LMS | LMB | |
| zero | RMS | RS | RVS | RVS | Zero | LVS | LVS | LS | LMS | |
| Zero | RMS | RS | RVS | RVS | Zero | LVS | LVS | LS | LMS | |
| LVS | RMB | RMS | RMS | RS | RVS | RVS | Zero | LVS | LS | |
| LS | RB | RMB | RMB | RMS | RS | RVS | RVS | RVS | Zero | |
| LM | RVB | RB | RMB | RMB | RMS | RS | RVS | RVS | LVS | |
| LB | RVB | RB | RB | RMB | RMB | RMS | RS | RVS | RVS | |
| LVB | RVB | RVB | RB | RB | RMB | RMB | RMS | RS | RVS | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, S.; Lin, T.; Jheng, K.; Wu, C. Application of Fuzzy Theory and Optimum Computing to the Obstacle Avoidance Control of Unmanned Underwater Vehicles. Appl. Sci. 2020, 10, 6105. https://doi.org/10.3390/app10176105
Chen S, Lin T, Jheng K, Wu C. Application of Fuzzy Theory and Optimum Computing to the Obstacle Avoidance Control of Unmanned Underwater Vehicles. Applied Sciences. 2020; 10(17):6105. https://doi.org/10.3390/app10176105
Chicago/Turabian StyleChen, Shihming, Tsungyin Lin, Kaiyi Jheng, and Chengmao Wu. 2020. "Application of Fuzzy Theory and Optimum Computing to the Obstacle Avoidance Control of Unmanned Underwater Vehicles" Applied Sciences 10, no. 17: 6105. https://doi.org/10.3390/app10176105
APA StyleChen, S., Lin, T., Jheng, K., & Wu, C. (2020). Application of Fuzzy Theory and Optimum Computing to the Obstacle Avoidance Control of Unmanned Underwater Vehicles. Applied Sciences, 10(17), 6105. https://doi.org/10.3390/app10176105