1. Introduction
Autonomous driving refers to a technology that determines the driving situation through sensors and drives to the destination without driver intervention. Autonomous driving in the future is expected to increase traffic efficiency and driver convenience, and enhance traffic safety. Most traffic accidents and fatalities occur during lane changes and overtaking [
1]. Such accidents greatly injure human life, and autonomous driving remains an important task for full commercialization in the current technology regarding path planning safety. Adaptive cruise control [
2], lane-keeping assist [
3], and automated emergency braking [
4] of advanced driver assistance systems (ADAS) technologies have positive effects on driving safety [
5]. Recently, Advanced driver assistance systems (ADAS) use advanced detection sensors, global positioning systems (GPS), and video equipment to recognize situations while driving, judge the situation, and control the car. Therefore, companies, such as Google and Tesla, are working on fully autonomous driving without human intervention [
6]. However, it is still difficult to research the technology of fully autonomous driving. Therefore, this paper suggests determining how a vehicle should behave concerning surrounding vehicles as an obstacle avoidance path planning problem.
Path planning is a technology that enables mobile robots or vehicles to move autonomously. With the advancement of technology, research on avoiding obstacles without human intervention has been actively conducted in the field of autonomous driving [
7]. The path planning research area is divided into global path planning, which generates a path using the information from the entire map, and local path planning, which generates a path using sensors. Global path planning is a low-resolution high-level planning that determines the map information before the vehicle runs, creates a path, and then operates. Frequently used global path planning algorithms include sampling-based approaches [
8], search-based approaches [
9], continuous geometric curve-based methods [
10], and artificial dislocation field approaches [
11].
The sampling-based approach is a method that quickly searches the space by selecting a random point in each sample and creating a path continuously by extending it in the random point direction. Because the algorithm relaxes the completeness requirement, it has the advantage of being able to relatively quickly find a path that is possible from the start to the target point, even with a high-dimensional state space. Therefore, the destination can be reached safely without problems at a local minimum based on probability. The Rapidly exploring Random Tree (RRT) and RRT* algorithms [
8] are typical examples of the sampling-based approach method. However, the sampling-based approach methods have a limitation in finding the best path: the disadvantage of unnecessary costs in computation and inefficiency.
The second method is the search-based approach method. The biggest feature of this algorithm is searching for a heuristic-based search as the graph-based method. After the graph is generated, the path is searched from the start to the target point at the minimum cost. The optimum path can be found faster using the correct heuristic function. Examples include the Dijkstra algorithm and A* algorithm [
9]. However, the computation amount is limited due to the large graph and complexity of the environment. If the environment changes after determining the shortest path, it is difficult to respond quickly. Therefore, the algorithm works well in low-speed applications but has a limitation in high-speed driving.
The third method, the continuous geometry curve-based method, is an optimized path planning algorithm that uses the spline function used in various mobile robot fields. The search and sample methods described above do not include vehicle dynamics; thus, optimal path planning cannot be performed. However, this method is based on vehicle dynamics and many studies on path smooth algorithms [
12]. For example, the continuous geometry curve-based method can be performed using spline curves [
13], bezier curves [
14], and polynomial curves [
15]. However, these methods also have a limitation because they do not perform optimal path planning in terms of relative speed.
The fourth method is the risk-based approach, which consists of repulsive forces to avoid collision and attractive forces to reach the goal. Therefore, when accurate information on the roads and surrounding obstacles is available to recognize, it is an effective method to generate a trajectory without causing an obstacle collision. Because the risk-based approach method does not contain vehicle dynamics, it cannot guarantee experimentation in real vehicles. Examples include the artificial potential field (APF) [
11], which updates the peripheral information in the driving conditions of the expressway; then, the algorithm works. There are also attempts to imitate a way of the person as a way of defining risk, such as Driver’s Risk Field [
16] and humans motor response [
17]. While theses approaches to path planning through obstacle avoidance provide good results in many applications, there are some major drawbacks to the trade-off between essential computational resources and solution optimization. Many of the commonly used path planning methods rely heavily on extensive simulation testing because there is no formal stability analysis and verification methodology.
Therefore, it is desirable to formalize the path planning problem as a low complexity problem. In the Model Predictive Control (MPC) path planning, a path is found to solve a constrained optimal control problem over a finite time horizon. A cost function is minimized subject to constraints, including vehicle dynamics, design and physical constraints, and additional constraints introduced to avoid collision with surrounding vehicles. The constrained optimal control problem is solved in the receding horizon, i.e., at every time step, the problem is formulated over a shifted time horizon based on newly available sensor measurement information. The main advantage of resorting to such a formulation is that collision avoidance is guaranteed, provided that the optimization problem is feasible. However, collision avoidance constraints for trajectory planning are generally non-convex, limiting the feasibility and uniqueness of the solution to the optimization problem. Researchers rely on techniques such as piecewise-linear model [
18], Gaussian process-based approach [
19], convexification [
20], and machine learning [
21,
22,
23] to address the issue.
Local path planning is a high-resolution low-level planning that operates by generating a path using a limited time and space boundary [
24]. These algorithms make a finite set of trajectories that follow a waypoint provided by a global path planner, avoiding obstacles detected by the sensor. The discrete scheme of this trajectory is optimized by the integration of differential equations in vehicle dynamics [
25]. Typically, the bug algorithm, a local path planning algorithm, works based on sensors without information on the map [
26]. These algorithms make a straight line in the direction of the target point provided by the global path planner and then move along the line and encounter an obstacle. The algorithm detects the obstacle and moves around it. After moving around it, the algorithm finds the nearest point to the target point and moves back to the target point.
Another example of local path planning is the tentacle method [
27]. This method creates a path by selecting only one of several vehicle trajectories depending on the obstacle location and uses the local path planning method for global path planning. Because this method does not consider moving people or moving vehicles, it is currently used as path smoothing.
The aforementioned global path planning method limits the information from the entire map in the outdoor case where the map information is needed. The concept of local path planning is required to compensate for the limitations of global path planning [
24]. In most autonomous driving currently under research, maps are created through sensors. Then, path planning is conducted without information on the entire map. Many current path planning studies have used global path planning as local path planning [
28,
29,
30,
31]. Therefore, this paper focuses on the local path planning method of autonomous vehicles based on a predefined global path.
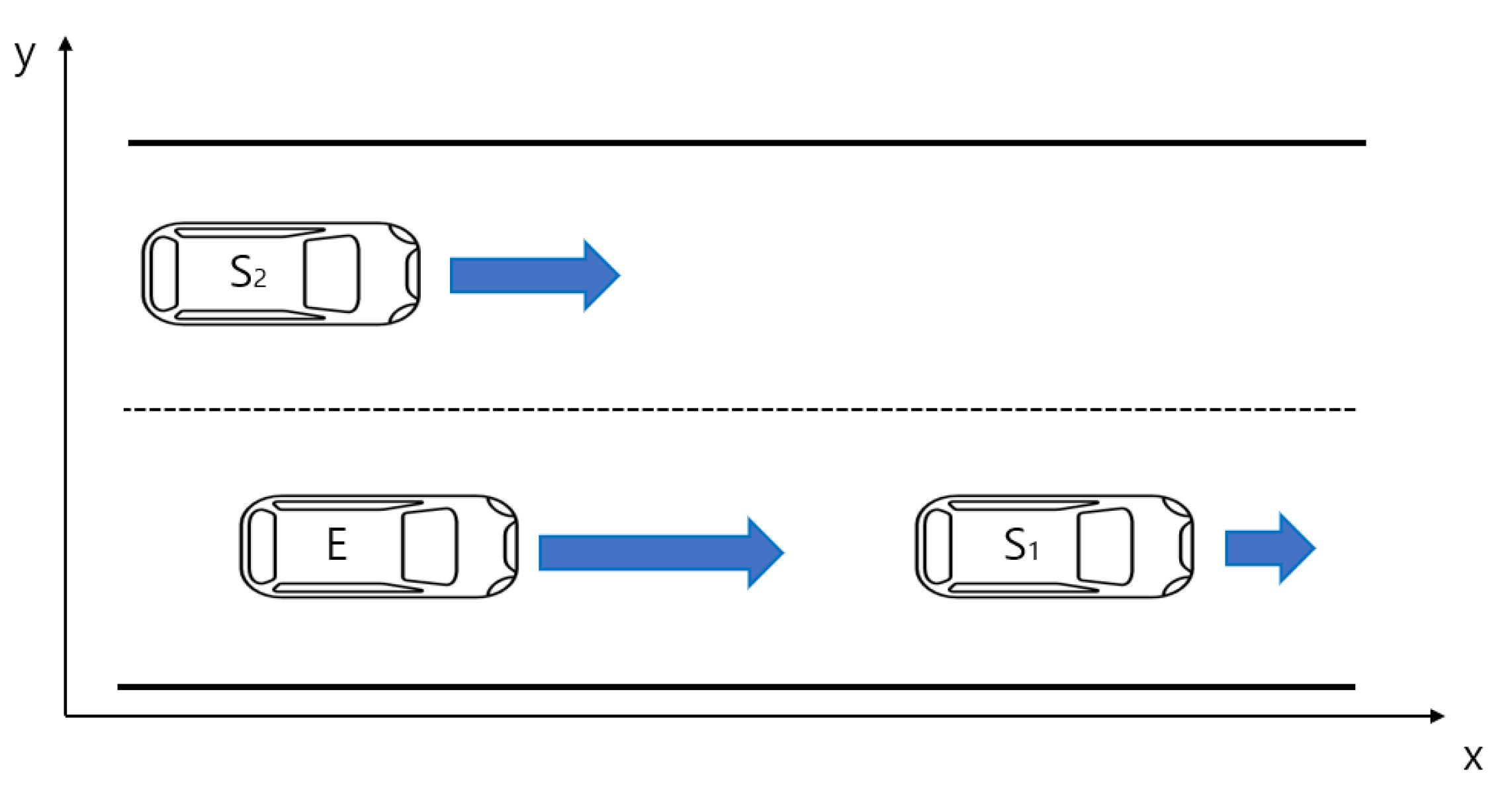
Autonomous driving requires the ability to maintain lanes and speed while overtaking front vehicles. In the driving environment, lanes are divided into solid lines and dotted lines, as shown in
Figure 1. The Ego vehicle
E must be controlled to avoid a dangerous collision with the surrounding vehicle
, where
q is the number of surrounding vehicles.
The APF algorithm [
32] described in
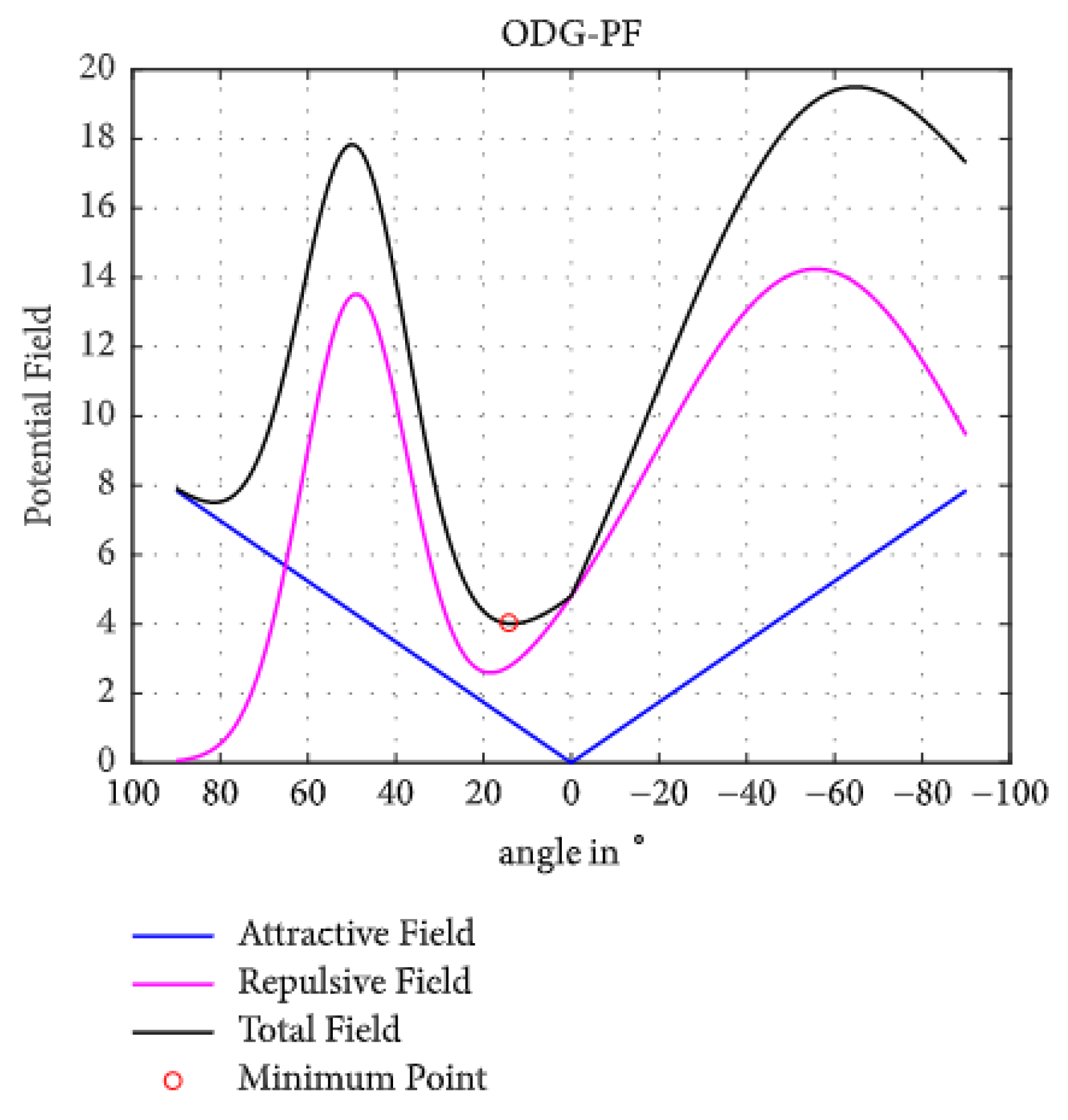
Section 1 explains the results of effectively conducting path planning with attractive and repulsive forces differently from other algorithms. However, due to the many parameters used for control, it is difficult to determine the optimal control. Thus, Cho et al. [
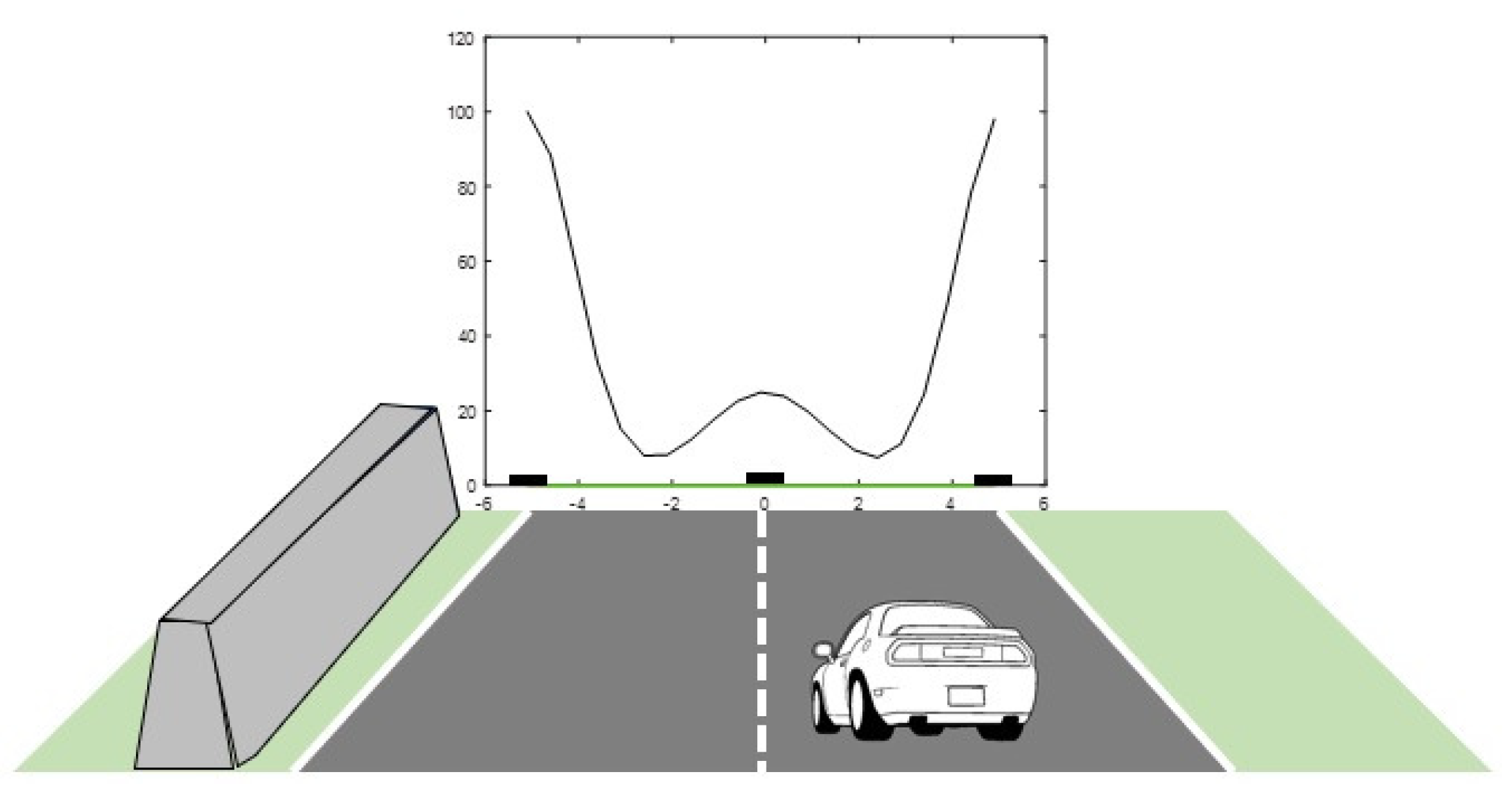
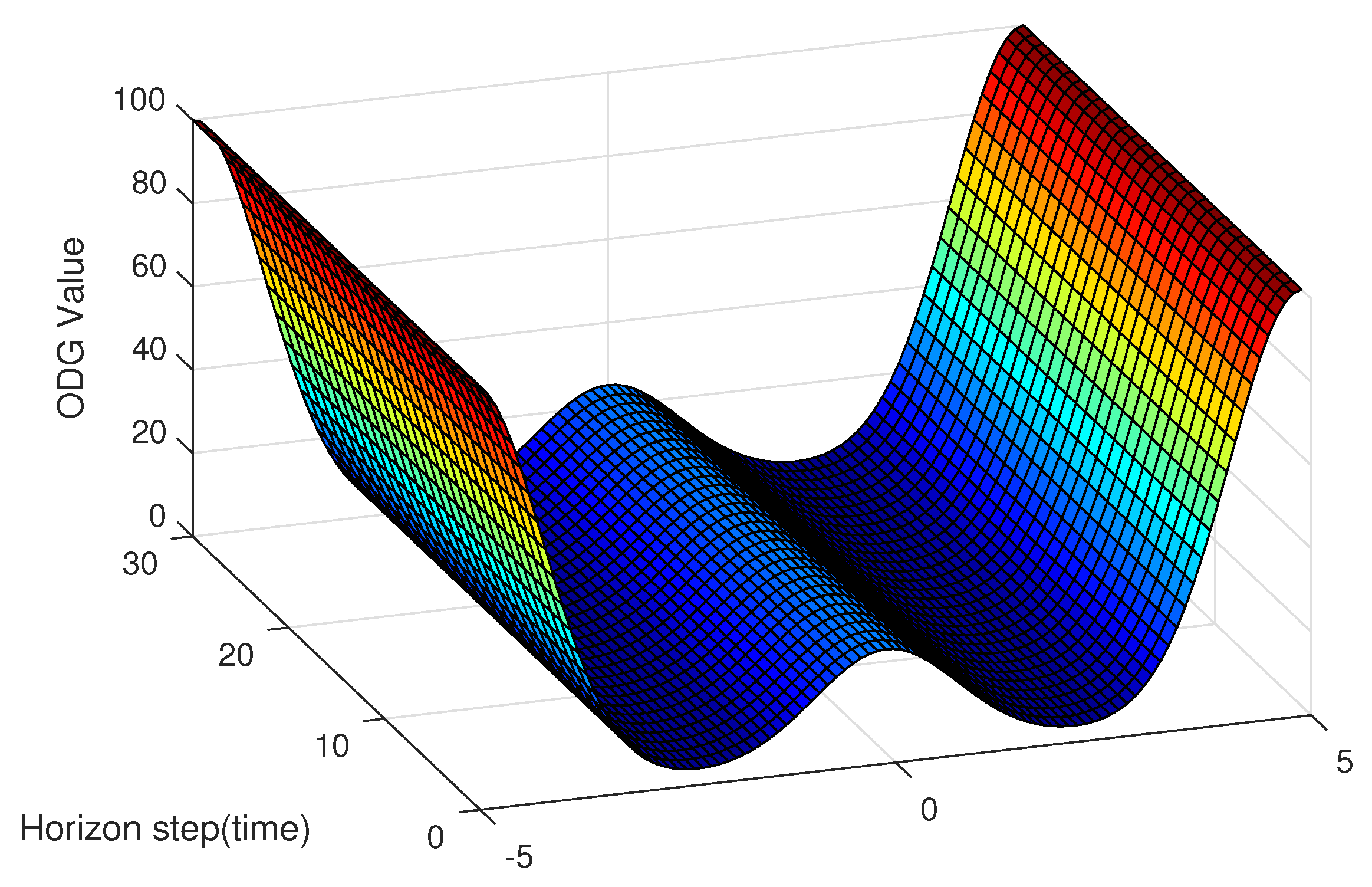
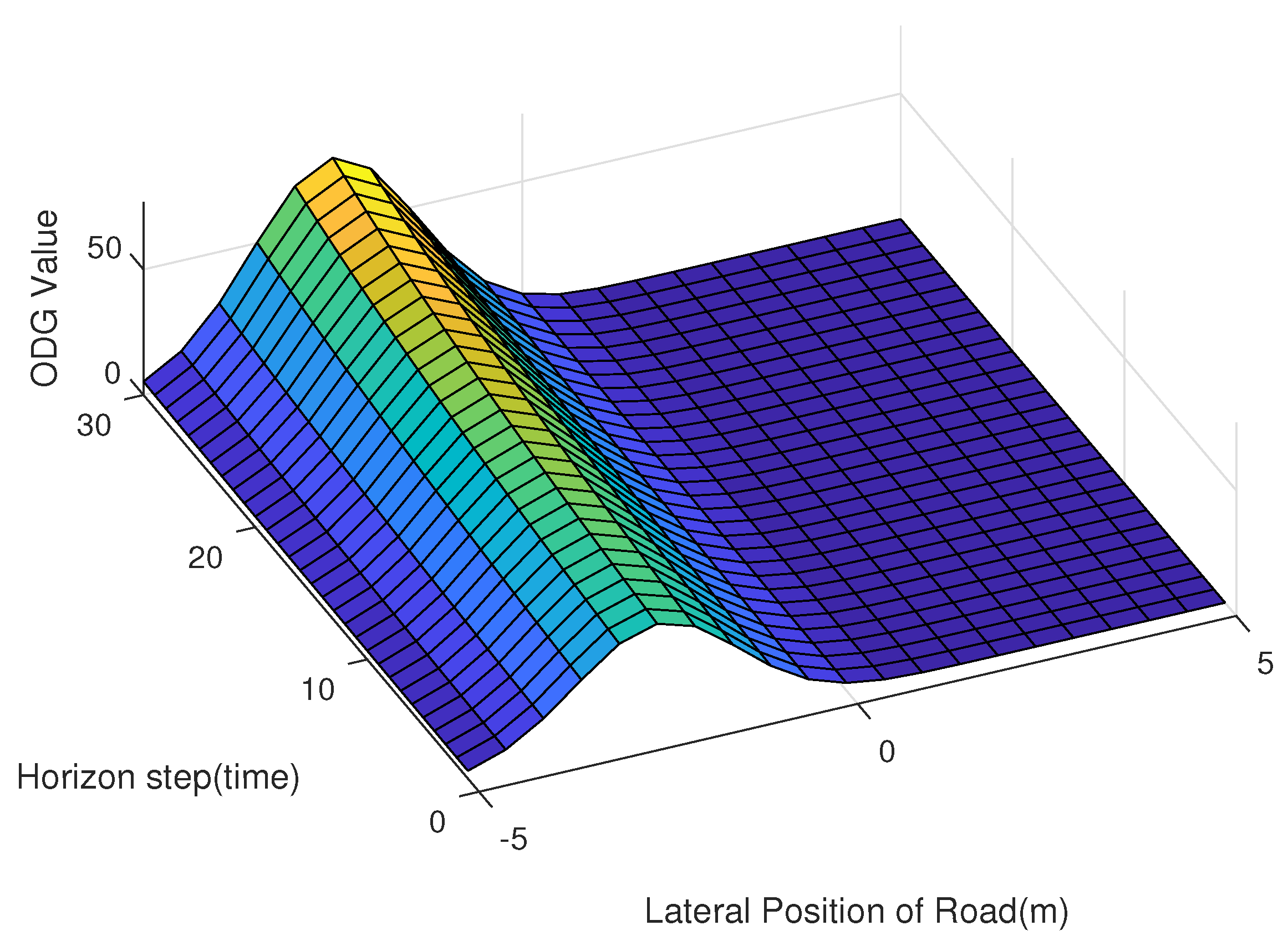
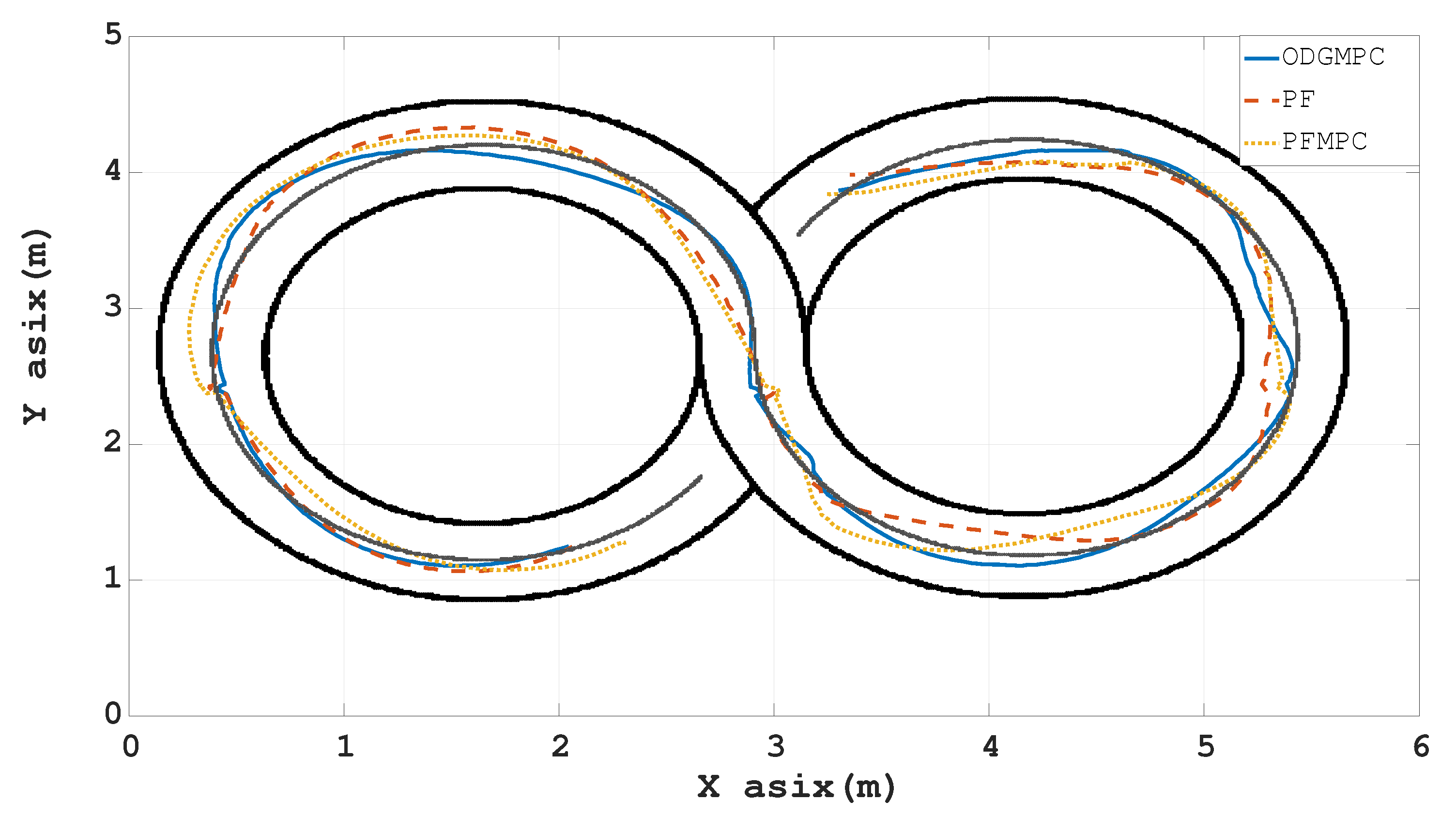
33] experimented using the ODG potential field (PF), the improved version of the APF algorithm. The ODG PF algorithm uses the Obstacle-Dependent Gaussian (ODG) model, which expresses the presence of an obstacle measured by the sensor as a risk using a Gaussian function [
33]. It is confirmed that path planning is more stable than APF through the experiment while having fewer parameters. However, as the ODG PF does not contain vehicle dynamics, the experimental results show unstable control, which is limited in real vehicle models.
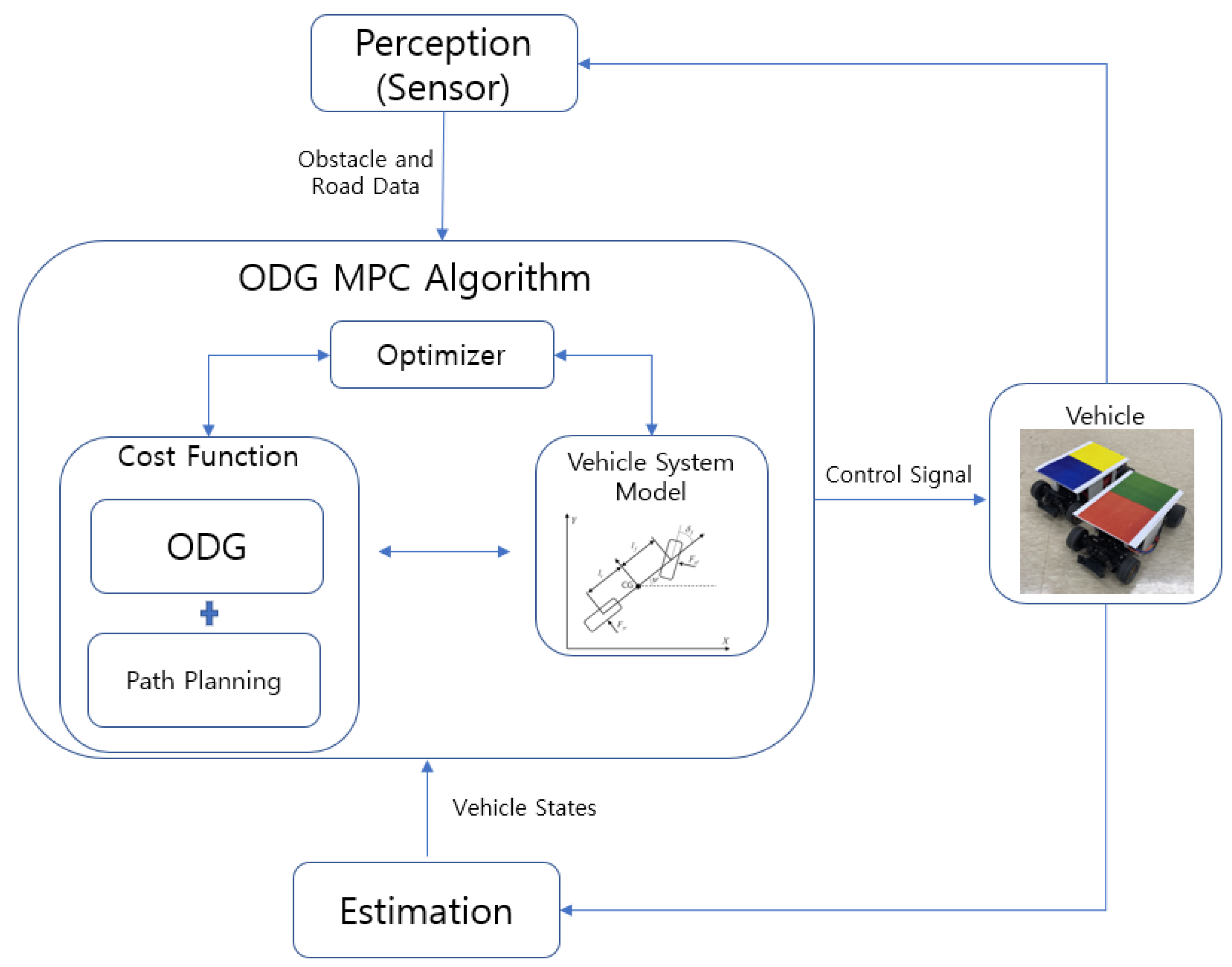
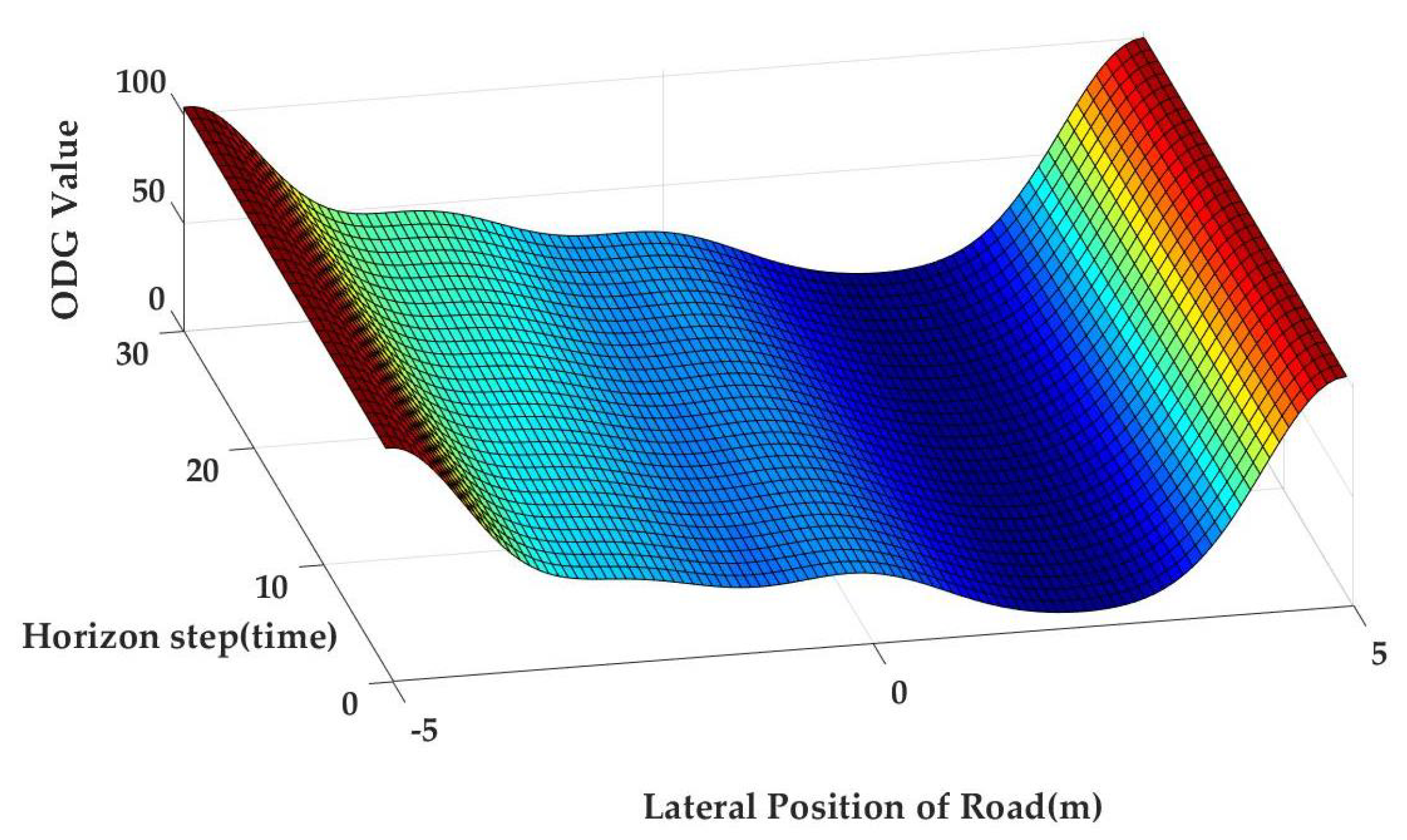
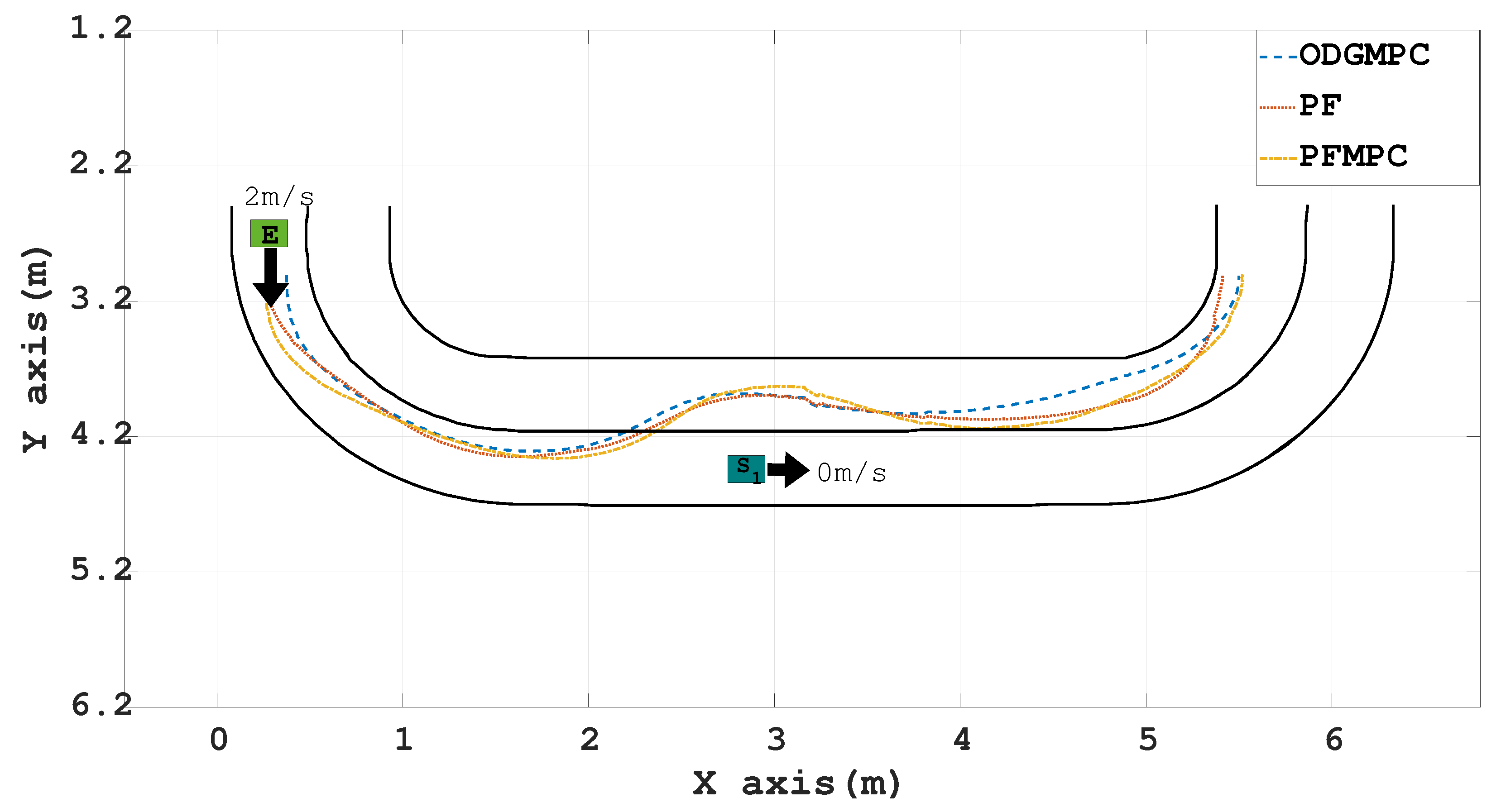
We propose a risk model-generalized ODG model to create a path that incorporates the vehicle risk rather than removing the MPC constraints on collision avoidance. The proposed algorithm calculates the optimal path using MPC, and in this process, the cost function includes the proposed risk model that expresses the risk information of the obstacle detected by the sensor. Due to the characteristics of the proposed algorithm, it tends to react quickly to obstacle information detected by the sensor and avoid the obstacle. As a result, stable driving is possible with a quick response to an obstacle vehicle, and a quick response creates a low lateral acceleration. Therefore, we propose an optimal controller that integrates the proposed risk model and MPC to solve the computational problem and enable stable obstacle avoidance path planning. The main contributions of this paper are as follows:
- (1)
We proposed a general ODG-based risk model to apply for vehicles and lanes to define the risk of driving.
- (2)
We combined the general ODG-based risk model and MPC, and the proposed algorithm responds to avoid obstacles quickly. Due to this tendency, the proposed method provides safe control and minimizes vehicle shake.
- (3)
The proposed method can control the vehicle for the obstacle avoidance process in real-time, and it has been confirmed through experiments.
This paper is organized as follows.
Section 2 discusses related work, introducing the ODG model and the MPC function.
Section 3 defines the proposed method using the proposed risk model and MPC.
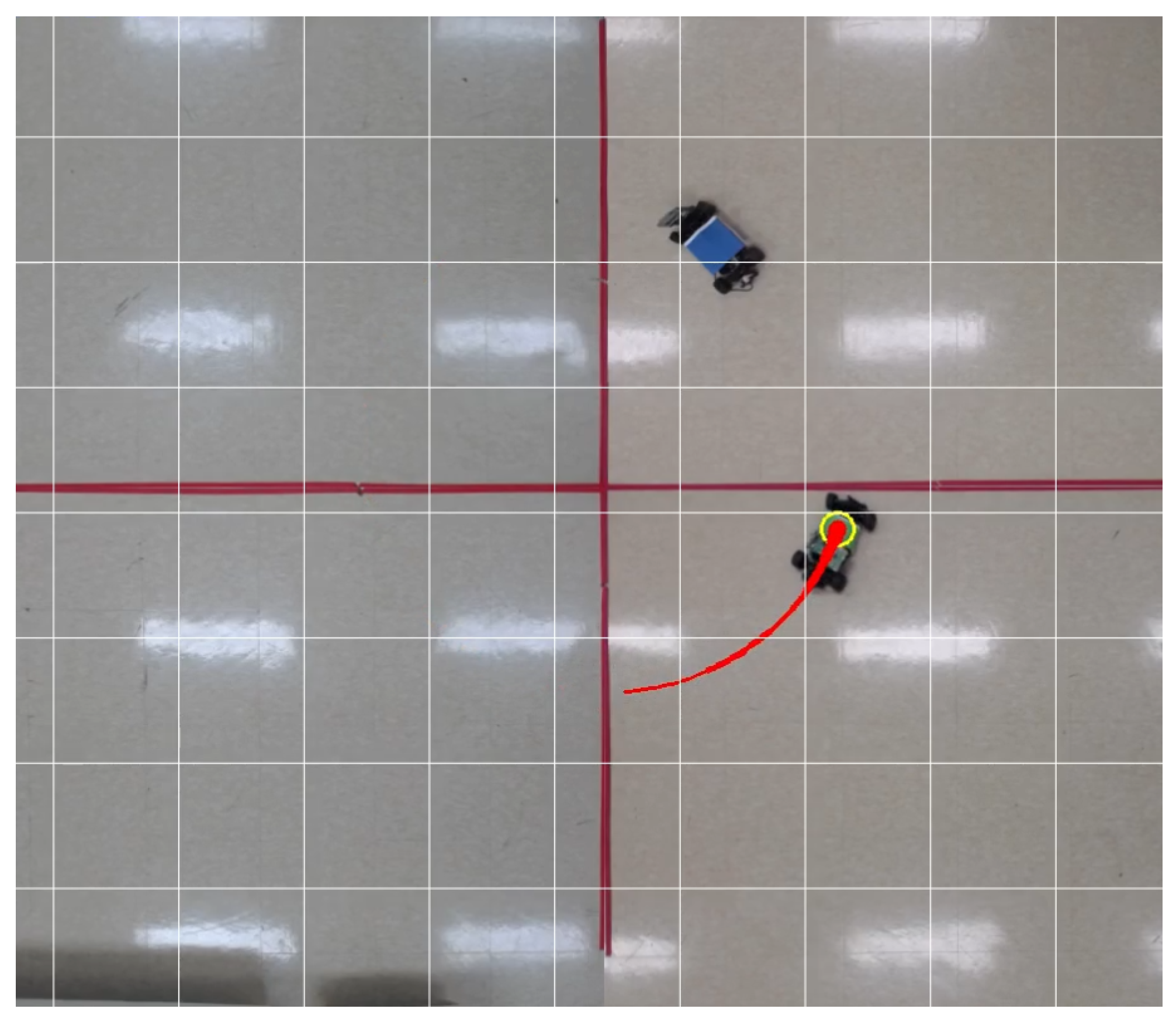
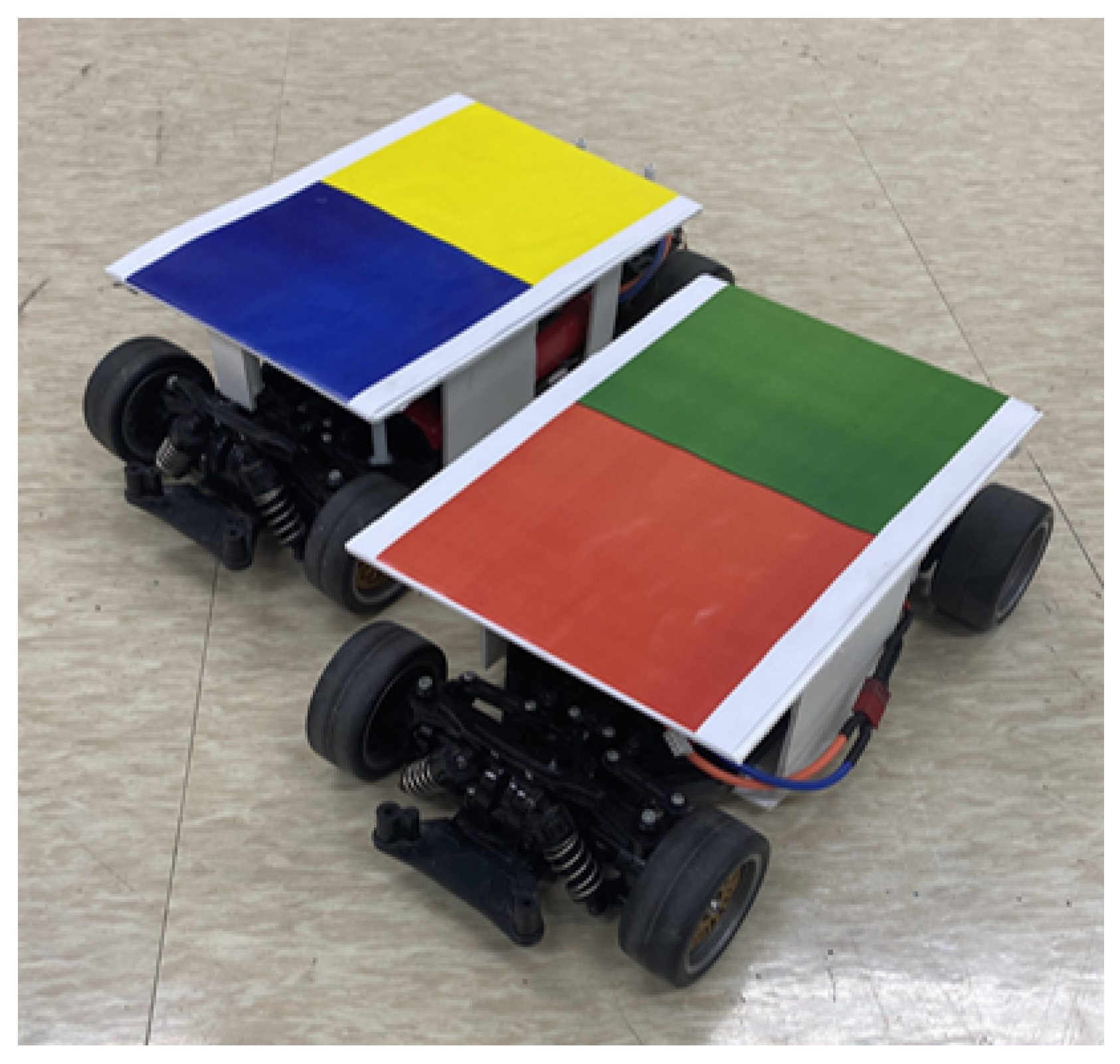
Section 4 presents an experiment using mobile robots similar to vehicle dynamics and the experimental results of propose method.
Section 5 summarizes and concludes. In addition, the nomenclature and variable definition are given in Nomenclature, respectively.






































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}