
A New Two-Stage Approach to Coordinate Electrical Vehicles for Satisfaction of Grid and Customer Requirements


Abstract
:Featured Application
Abstract
1. Introduction
- The development of a framework to fulfill grid requirements, such as voltage unbalance factors, voltage deviations, and prosumer requirements, such as charging cost and battery health, using V2G technology.
- Consideration of different scenarios, such as a change in load profile, penetration level, and price changes, have also been considered. Furthermore, this study also conducts a detailed comparison of the proposed method with other recent approaches.
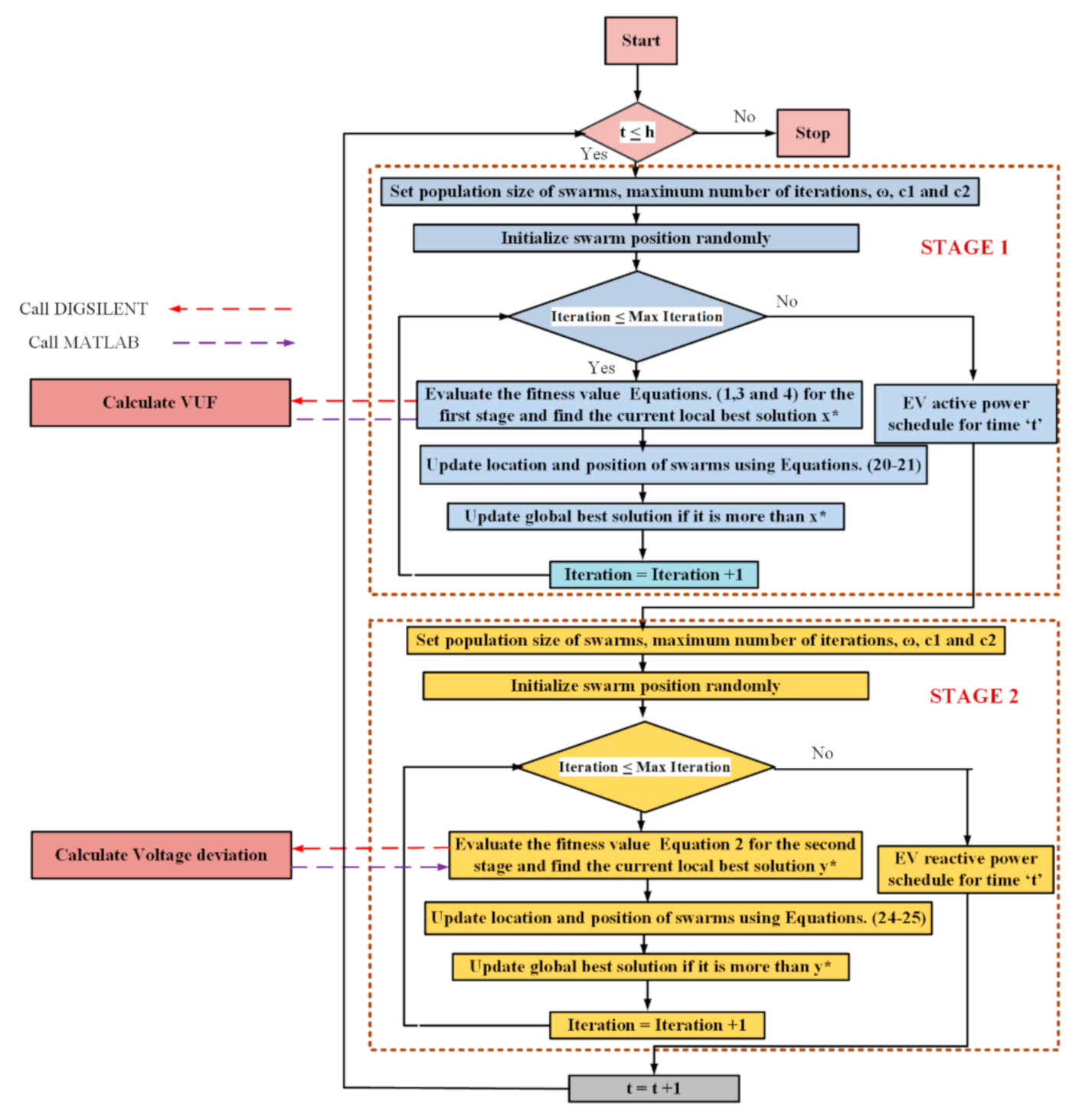
- Presentation of a method to solve the proposed method with real-time data exchange between DIgSILENT and MATLAB.
2. Description of the Proposed Method
- (i).
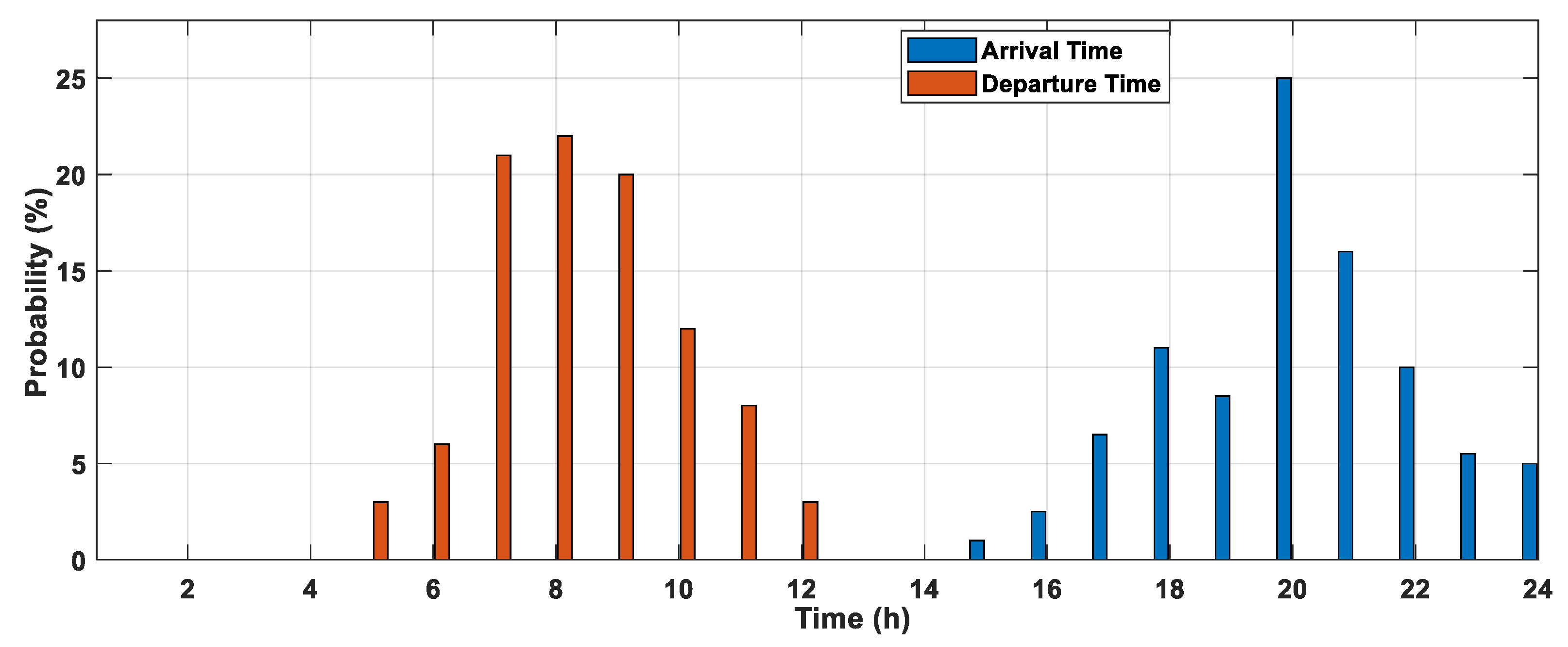
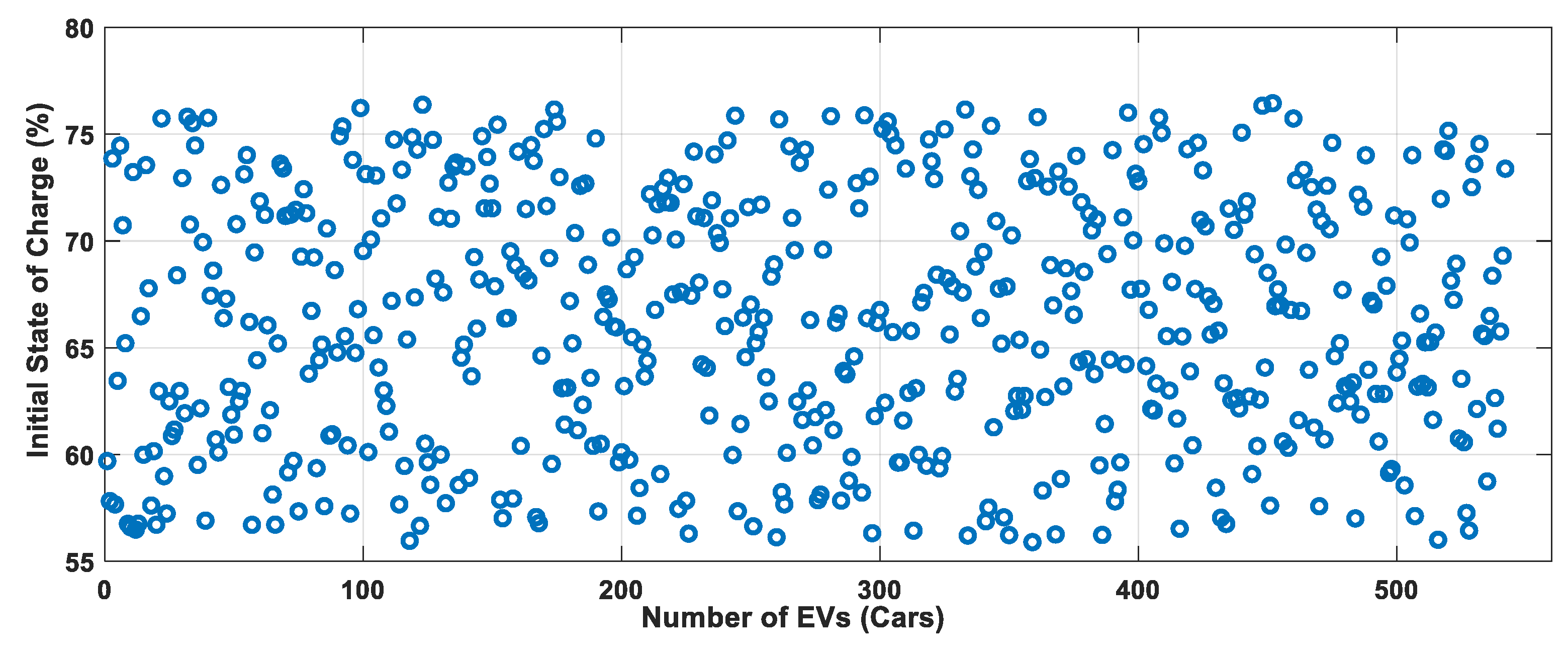
- The first step requires the preparation of the data of EV-user behaviors, e.g., plug-in time, plug-out time, daily distance, initial SOC, wear costs, information of the test systems, such as the residential baseload, dynamic price, and significant parameters of the PSO optimization algorithm.
- (ii).
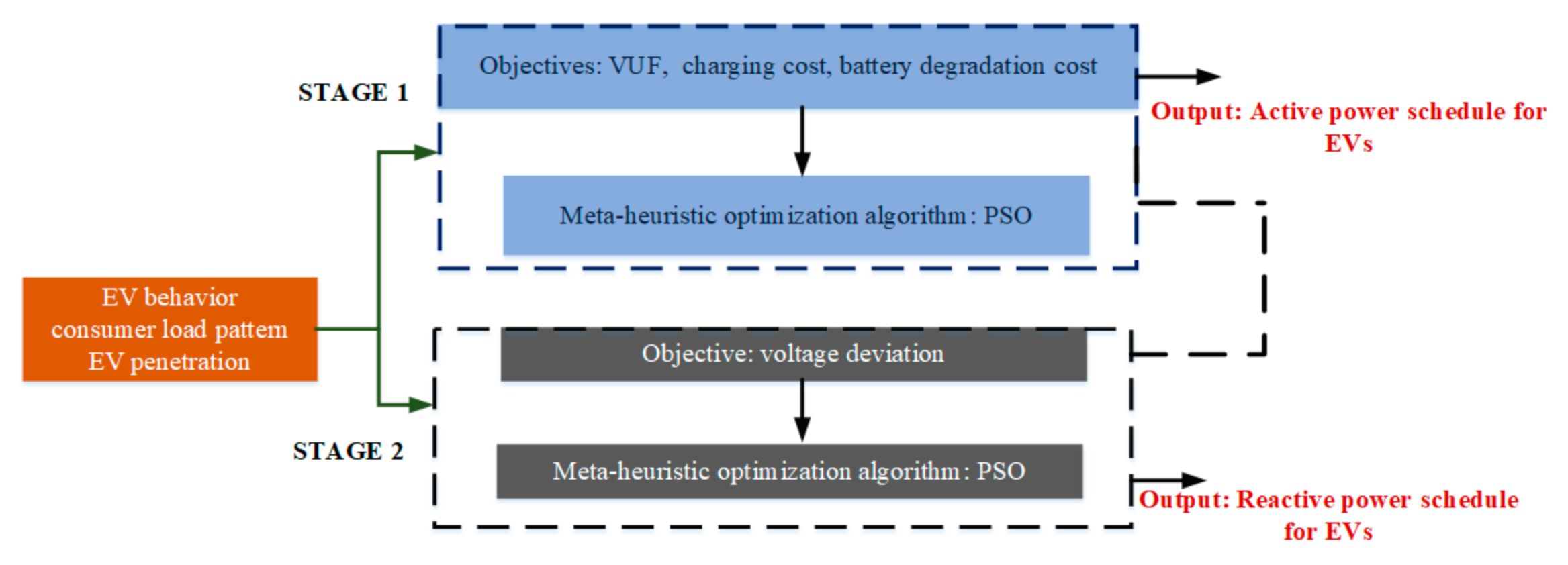
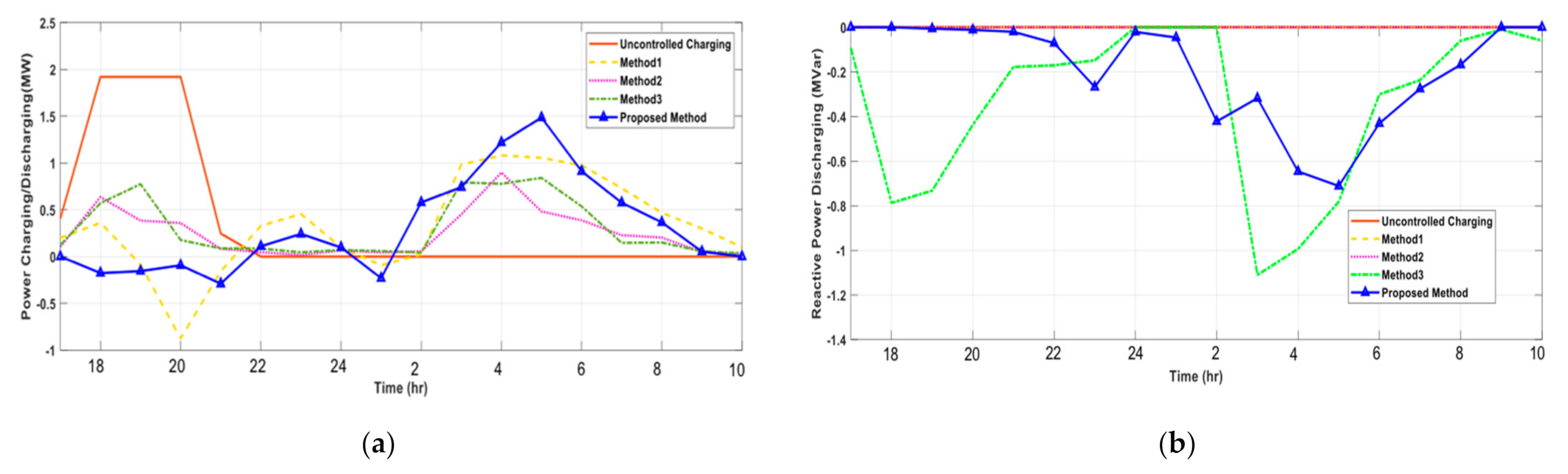
- Stage 1 uses the input data from the previous step for further processing and formulates an optimization problem in which the objectives are to minimize VUF, EV charging costs, and battery degradation costs. This optimization problem is then solved using the PSO. The output from Stage 1 provides an optimized power schedule for charging (G2V)/discharging (V2G) as well as the best costs for customers.
- (iii).
- Once the electrical schedule for EVs is obtained, Stage 2 will use this information to formulate another optimization problem with the purpose of minimizing voltage deviation. The constraint to this optimization is the reactive power capability of V2Gs, which can be produced/absorbed by controlling the inverter [39,40]. Moreover, the reactive power compensation from EVs will not cause any degradation to the battery [41,42]. Thus, Stage 2 provides a reactive power schedule for EVs.
3. Optimization Problem Formulation
3.1. Objective Function
3.1.1. Voltage Unbalance
3.1.2. Voltage Deviation
3.1.3. Customer Costs
3.2. Constraints
4. Application of PSO to Solve the Proposed Optimization Problem
5. Simulation Results and Discussion
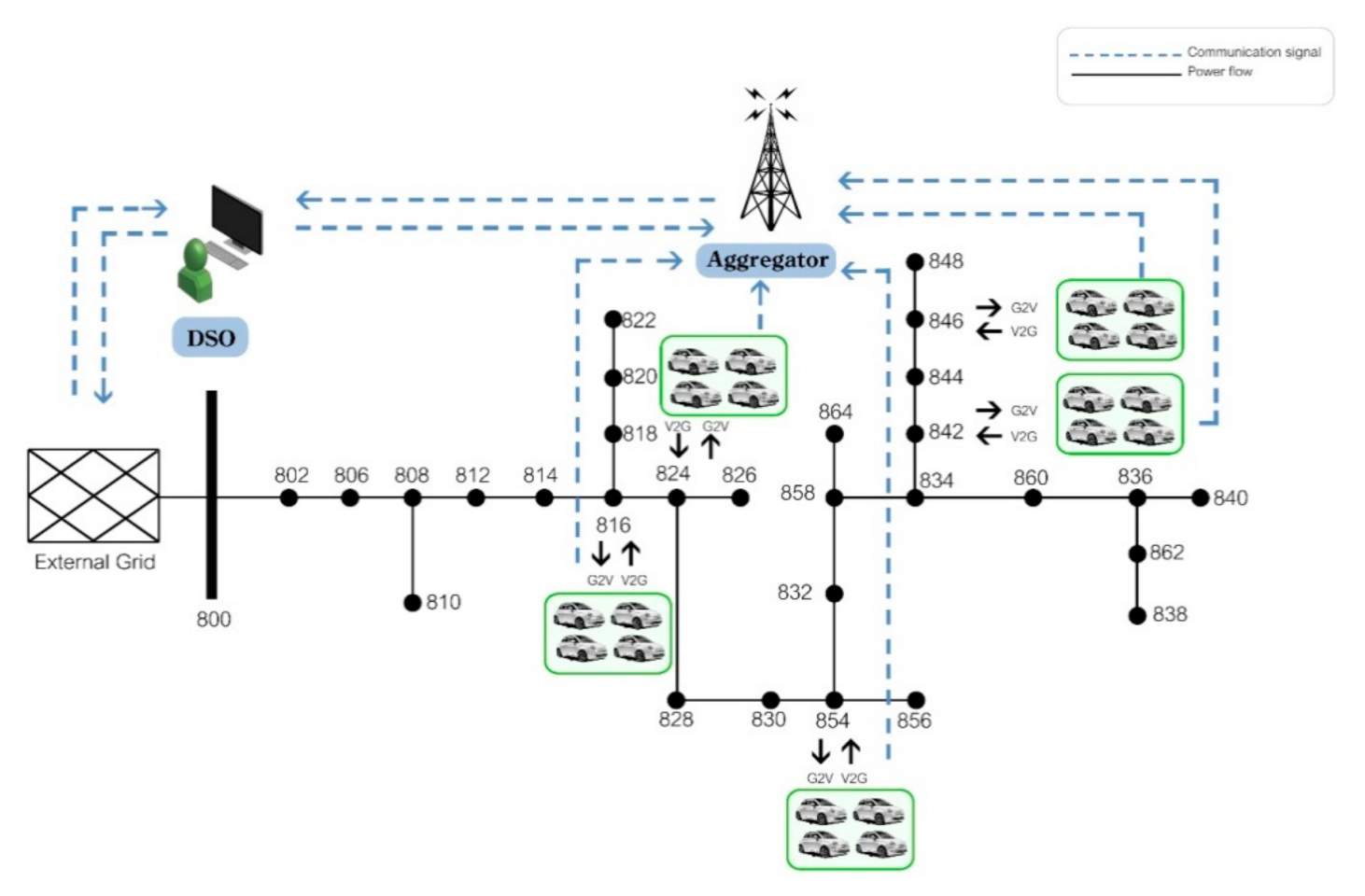
5.1. Description of the Test System
5.2. Results and Discussion under Different Scenarios
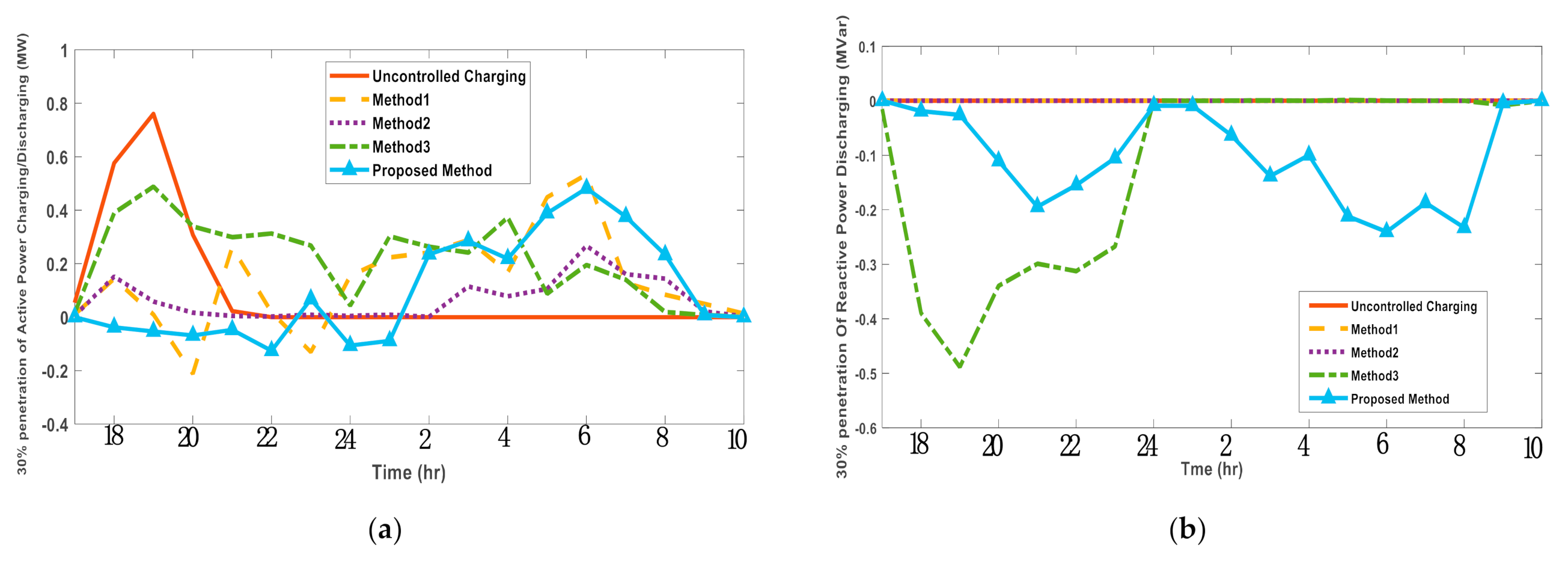
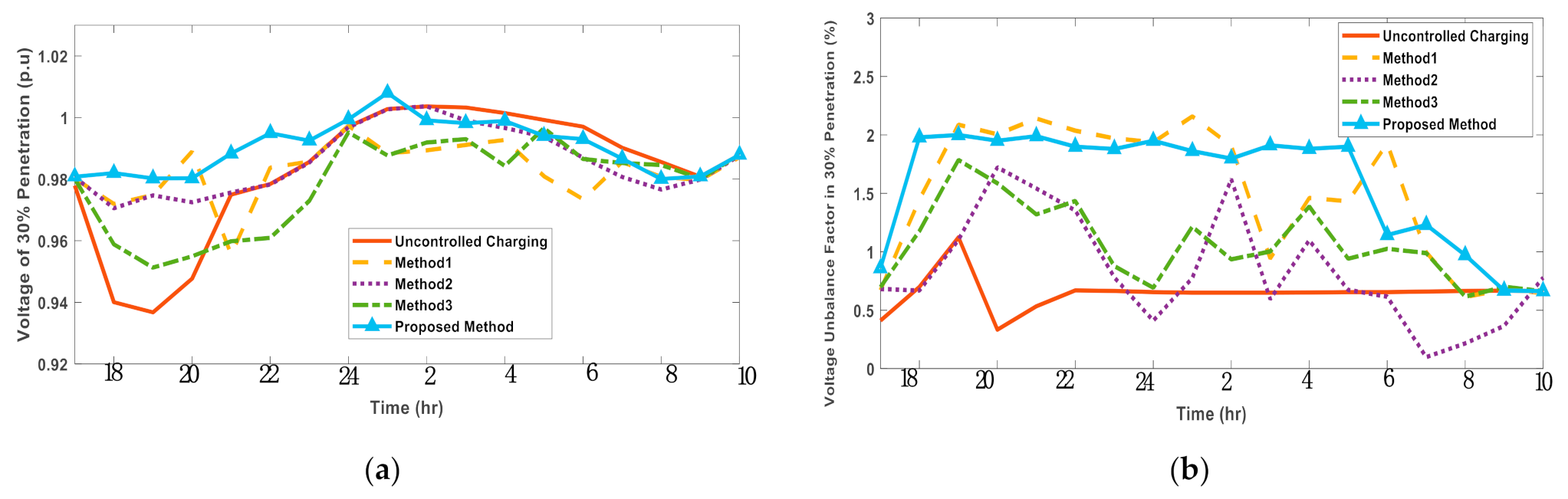
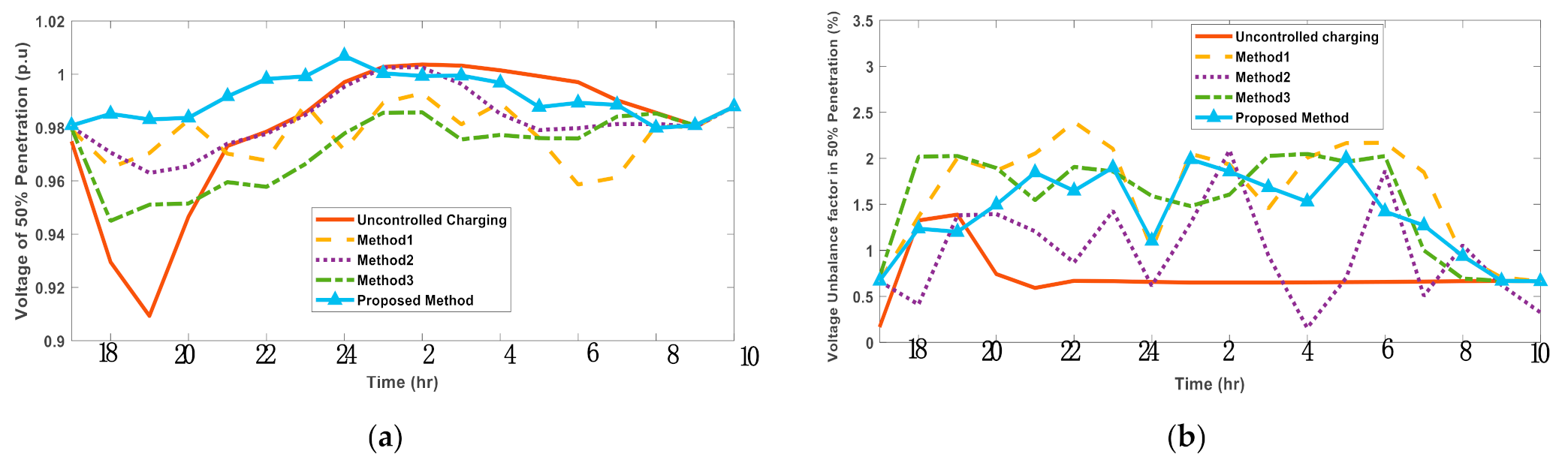
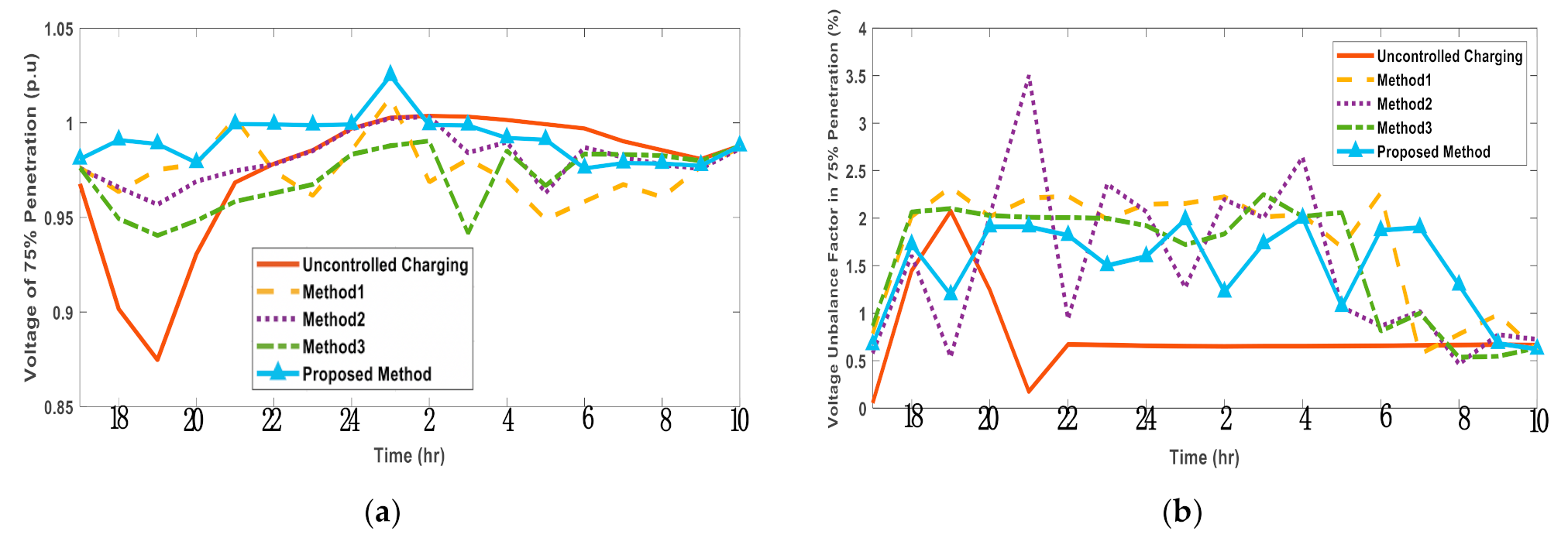
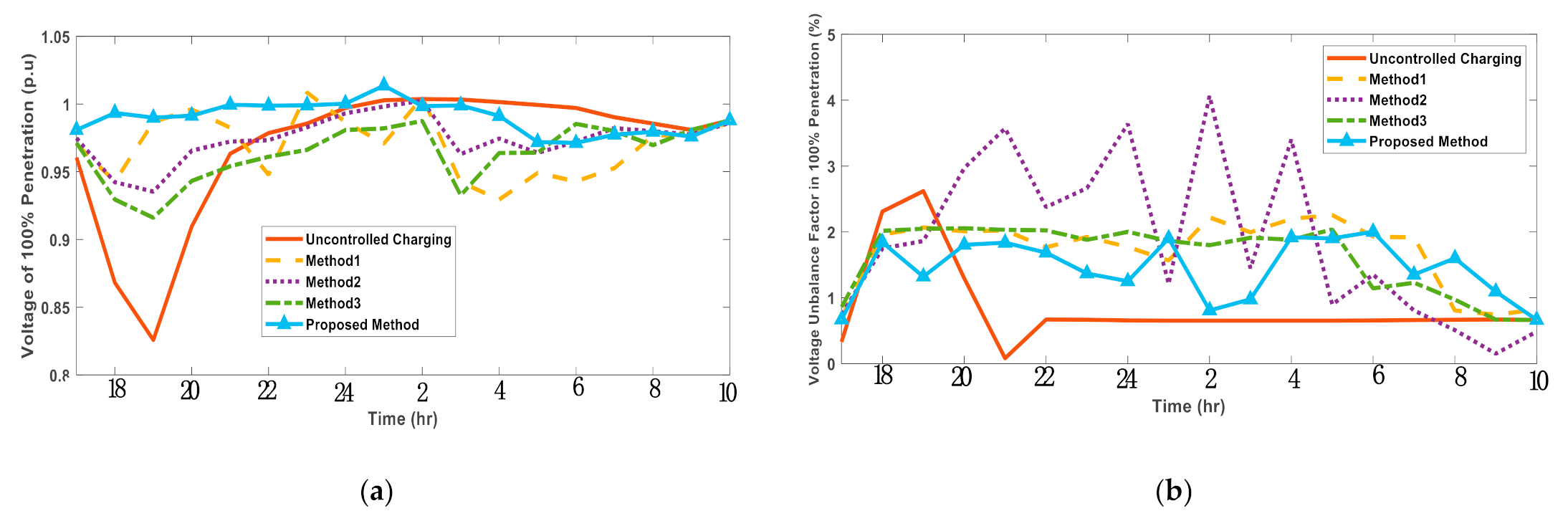
5.2.1. Case Study under Different EV Penetration Levels
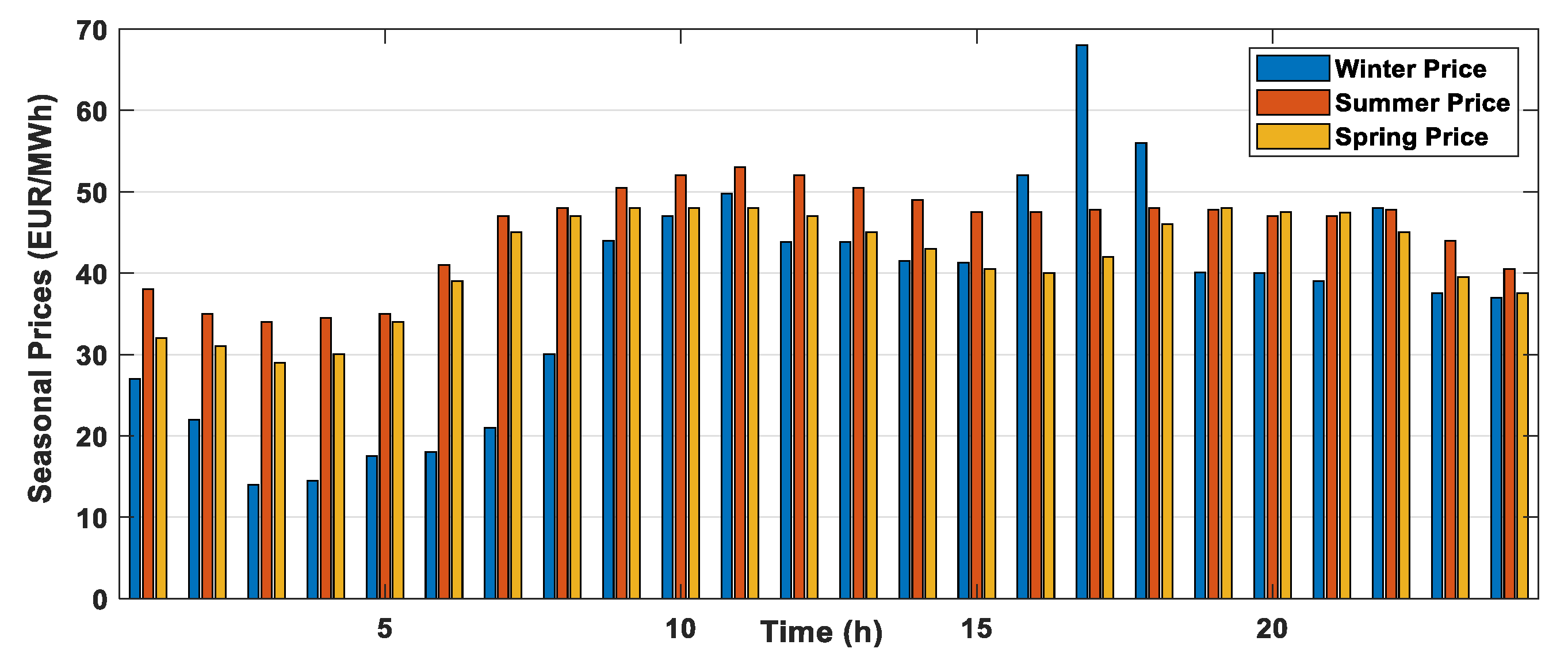
5.2.2. Case Study under Different Price Signals
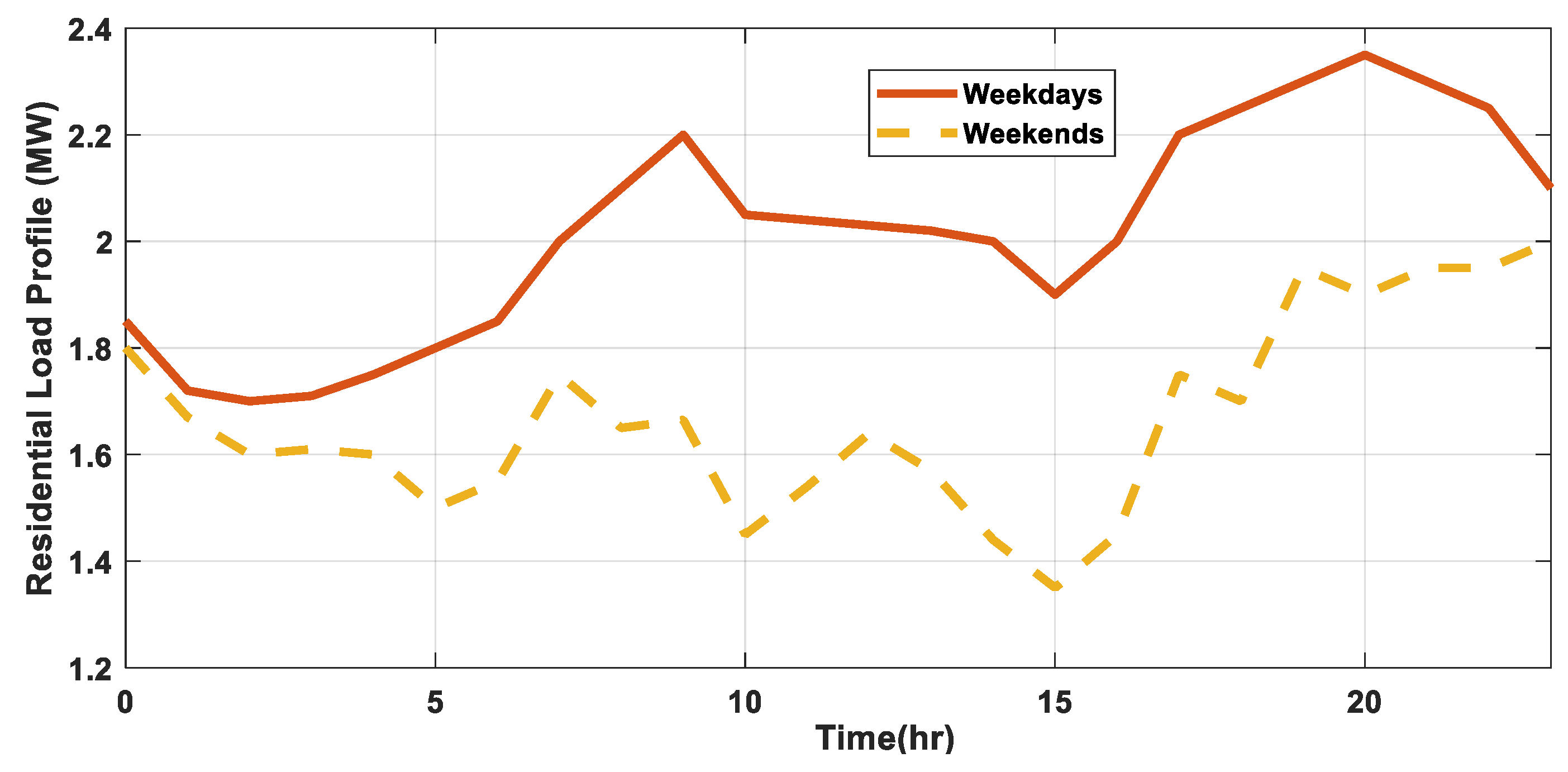
5.2.3. Case Study under Weekend Load Profile
5.2.4. Discussion
6. Conclusions
- (i).
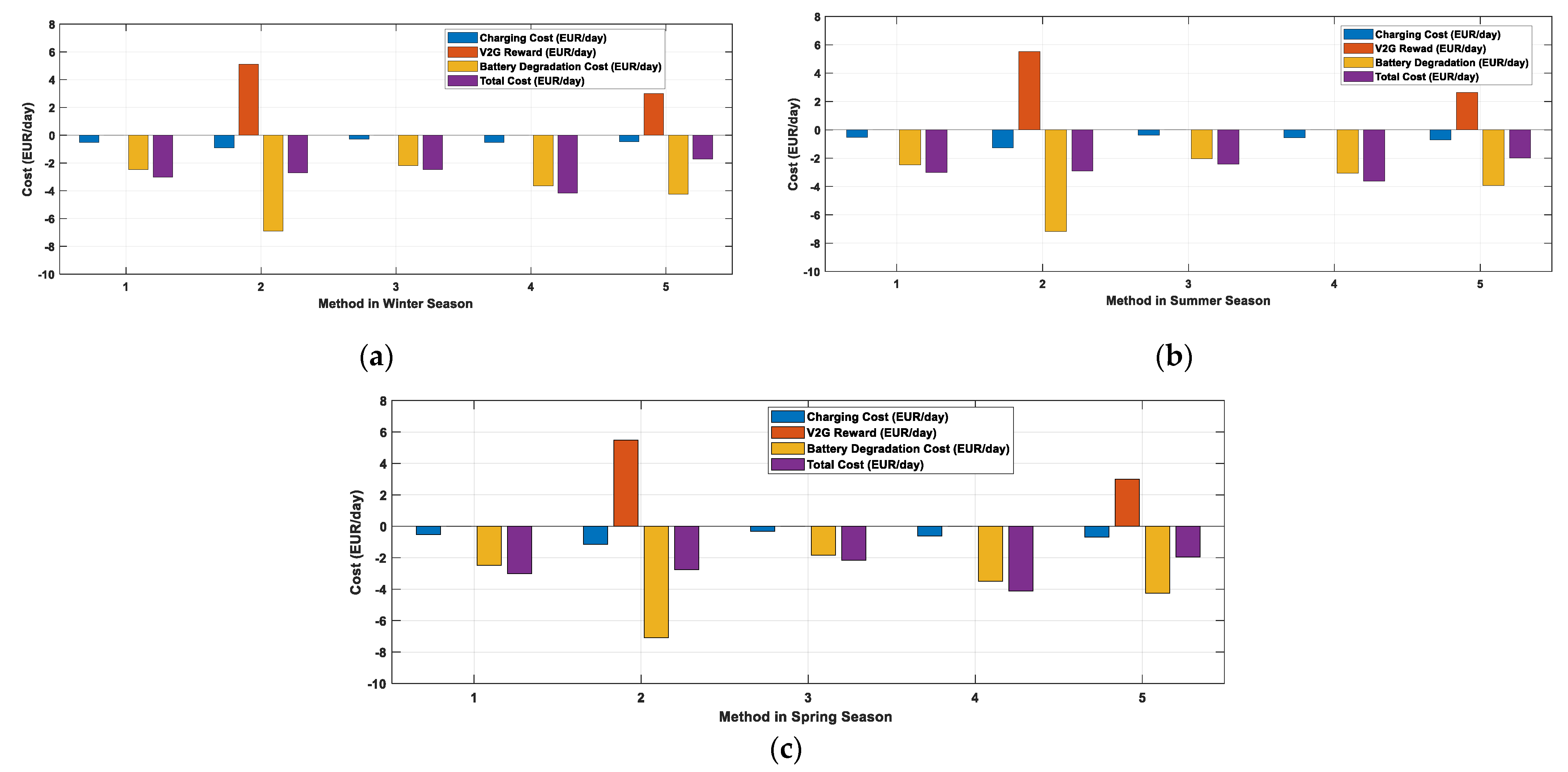
- The proposed method provides the lowest cost for customers to charge/discharge their EVs compared with other existing methods for all the scenarios considered in this study. For the summer season, the total cost using the proposed method is around 1.515 times lower than uncontrolled charging and 1.206 times lower than the result obtained using the method which provided the least cost next to the proposed method. A similar trend was seen for other scenarios considered in this study.
- (ii).
- The battery degradation costs with the proposed method are around 1.756 times lower than Method 1 but 1.64, 1.86, and 1.37 times higher than with uncontrolled charging, and Methods 2 and 3, respectively, when EV penetration is 100%. Similar results were obtained for other case studies taken in this paper.
- (iii).
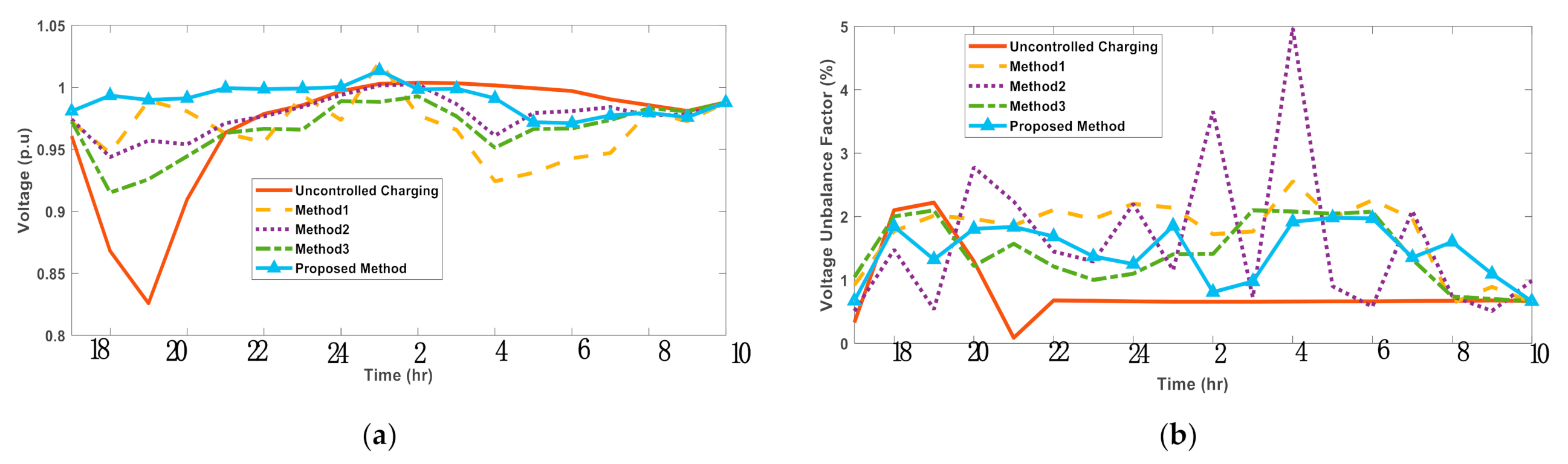
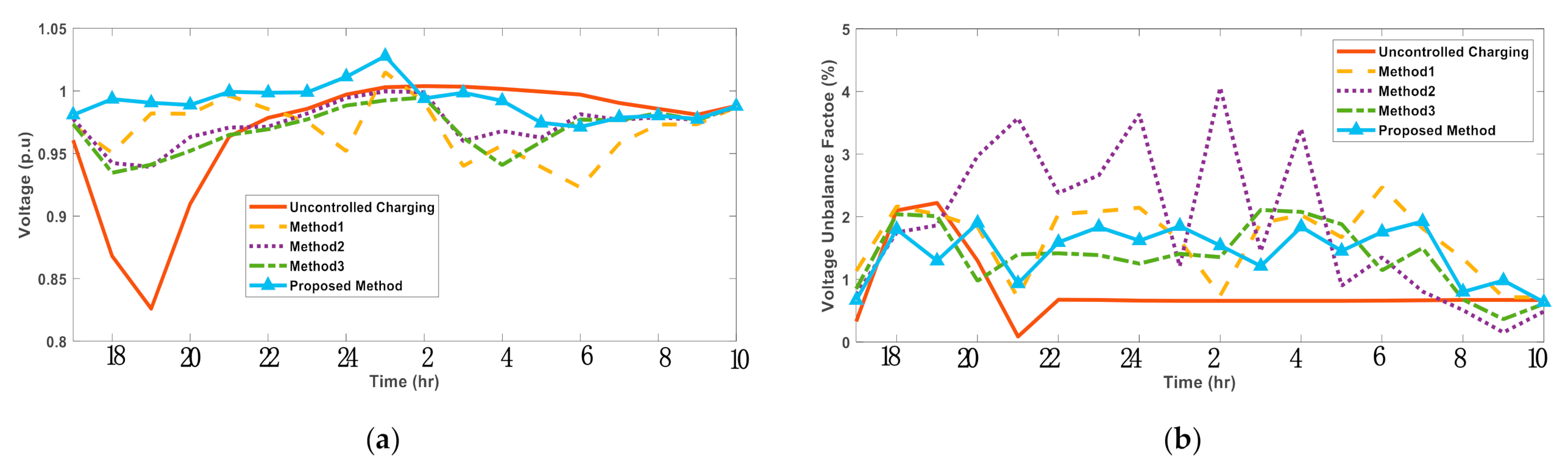
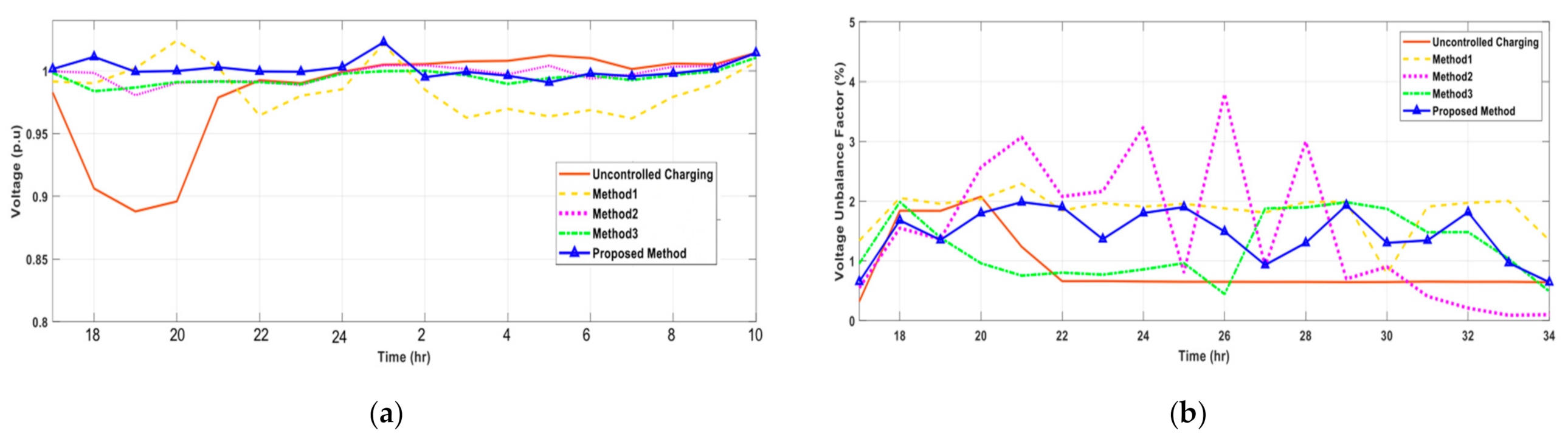
- The minimum voltages (p.u) of the critical bus for winter, summer, spring, 100% penetration scenario, weekday and weekend load profiles were 0.97, 0.98, 0.975, 0.97, and 0.99, respectively, and the maximum voltages (p.u) of the critical bus for winter, summer, spring, 100% penetration scenario, weekday and weekend load profile were 1.01, 1.02, 1.01, 1.01, and 1.02, respectively, which shows that the voltage profile lies within the ±5% voltage limit. However, the minimum voltage under uncontrolled charging lies below the desired limits for all the scenarios.
- (iv).
- The values of VUF under uncontrolled charging for winter, summer, spring, 100% penetration scenario, weekday and weekend load profile were 2.1, 2.1, 2.1, 2.1, and 2, respectively. The values of VUF with the proposed method for winter, summer, spring, 100% penetration scenario, weekday and weekend load profile were 1.98, 1.98, 1.95, 1.98, and 1.98, respectively. Thus, it can be seen that the VUF also lies within the prescribed limit (<2% IEEE standard) with the application of the proposed method for all the case studies considered in this study.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Susceptance | |
| Charging Cost in time t (EUR/kWh) | |
| Capital Cost (EUR/kWh) | |
| Salvage value of the battery (EUR/kWh) | |
| Battery cycle life wthout V2G mode (days) | |
| Battery cycle life wth V2G mode (days) | |
| Accerlelation Coefficent | |
| Daily distance of EV (km) | |
| Maximum distance of EV type (km) | |
| Initial rated energy (kWh) | |
| Energy in driving (kWh) | |
| Energy in V2G (kWh) | |
| Objective function and normalized function | |
| global best of PSO | |
| Conductance (S) | |
| Spectively denote the initial and final SOC (kWh/kWh) | |
| Number of nodes in the system. | |
| Number of EVs charging, discharging | |
| Local best for PSO | |
| Maximum power charging/discharging (kW) | |
| Individual EVs charging/discharging (kW) | |
| Power charging at node n (kW) | |
| Power discharging at node n (kW) | |
| Active power supply and demand of bus i at time t (kW) | |
| Maximum individual reactive power discharging (kVar) | |
| Individual reactive power discharging (kVar) | |
| Reactive power supply and demand of bus i at time t (kVar) | |
| Random number | |
| V2G reward (EUR/kWh) | |
| Individual state of charging of EV i at time t | |
| Initial/final state of charging of EVs | |
| Maximum/minimum stage of charge of EVs | |
| Scaling factor of battery wear during driving | |
| Voltage of bus i and j at time t | |
| velocity of a swarm i in j-th iteration | |
| Measured voltage at node n | |
| Reference voltage | |
| Negative sequence components in voltage | |
| Positive sequence components in voltage | |
| wear price (EUR/kWh) | |
| wear price with V2G (EUR/kWh) | |
| wear price with V2G (EUR/kWh) | |
| Position in Stage 1 and 2 of a swarm i in j-th iteration | |
| Differential time (1 h) | |
| Efficiency of charging | |
| Efficiency of discharging | |
| Efficiancy of charging/discharging | |
| Inertial weight factor | |
| Weight of multi objective function | |
| Voltage phase angle between buses i and j at time t | |
| AC | Alternating current |
| BC | Battery degradation cost |
| CC | Charging cost |
| DC | Direct current |
| DGs | Distributed generation |
| EV | Electric vehicle |
| EVs | Electric vehicles |
| G2V | Grid to vehicle |
| PSO | particle swarm optimization |
| SOC | State of charge |
| VD | Voltage deviation |
| VUF | Voltage unbalance factor |
| V2G | Vehicle to grid |
References
- Ribberink, H.; Entchev, E. Electric Vehicles—A One-Size-Fits-All Solution for Emission Reduction from Transportation? In Proceedings of the 2013 World Electric Vehicle Symposium and Exhibition (EVS27), Barcelona, Spain, 17–20 November 2013; pp. 1–77. [Google Scholar]
- IEA. Global EV Outlook 2019; IEA: Paris, France, 2019; Available online: https://www.iea.org/reports/global-ev-outlook-2019 (accessed on 15 September 2020).
- Muratori, M. Impact of Uncoordinated Plug-in Electric Vehicle Charging on Residential Power Demand. Nature Energy. Available online: https://www.nature.com/articles/s41560-017-0074-z (accessed on 15 October 2020).
- Bohn, S.; Agsten, M.; Dubey, A.; Santoso, S. A Comparative Analysis of PEV Charging Impacts—An International Perspective. In Proceedings of the SAE 2015 Word Congress& Exhibition, Detroit, MI, USA, 21–23 April 2015. [Google Scholar]
- Voltage Characteristics of Public Distribution Systems. ISO Standard DIN EN 50160. 2011. Available online: https://copperalliance.org.uk/uploads/2018/03/542-standard-en-50160-voltage-characteristics-in.pdf (accessed on 20 October 2020).
- The United Illuminating Company. Available online: http//www.uinet.com (accessed on 20 October 2020).
- Sassi, O.; Oulamara, A. Joint Scheduling and Optimal Charging of Electric Vehicles Problem. In Computational Science and Its Applications—ICCSA 2014. Hrsg. von D. Hutchison. Bd. 8580. Lecture Notes in Computer Science; Springer International Publishing: Berlin/Heidelberg, Germany, 2014; pp. 76–91. [Google Scholar]
- Betz, J.; Werner, D.; Lienkamp, M. Fleet Disposition Modeling to Maximize Utilization of Battery Electric Vehicles in Companies with On-Site Energy Generation. Transp. Res. Procedia 2016, 19, 241–257. [Google Scholar] [CrossRef]
- Le Floch, C.; Belletti, F.; Saxena, S.; Bayen, A.M.; Moura, S. Distributed optimal charging of electric vehicles for demand response and load shaping. In Proceedings of the 2015 54th IEEE Conference on Decision and Control (CDC), Osaka, Japan, 15–18 December 2015. [Google Scholar]
- Sarabi, S.; Davigny, A.; Riffonneau, Y.; Robyns, B. V2G electric vehicle charging scheduling for railway station parking lots based on binary linear programming. In Proceedings of the 2016 IEEE International Energy Conference (ENERGYCON), Leuvan, Belguim, 4–8 April 2016. [Google Scholar]
- Chaib, A.E.; Bouchekara, H.R.E.H.; Mehasni, R.; Abido, M.A. Optimal power flow with emission and non-smooth cost functions using backtracking search optimization algorithm. Int. J. Electr. Power Energy Syst. 2016, 81, 64–77. [Google Scholar] [CrossRef]
- Warid, W.; Hizam, H.; Mariun, N.; Abdul-Wahab, N. Optimal Power Flow Using the Jaya Algorithm. Energies 2016, 9, 678. [Google Scholar] [CrossRef]
- He, X.; Wang, W.; Jiang, J.; Xu, L. An Improved Artificial Bee Colony Algorithm and Its Application to Multi-Objective Optimal Power Flow. Energies 2015, 8, 2412–2437. [Google Scholar] [CrossRef] [Green Version]
- Niknam, T.; Narimani, M.R.; Jabbari, M.; Malekpour, A.R. A modified shuffle frog leaping algorithm for multi-objective optimal power flow. Energy 2011, 36, 6420–6432. [Google Scholar] [CrossRef]
- Sahu, S.; Barisal, A.K.; Kaudi, A. Multi-objective optimal power flow with DG placement using TLBO and MIPSO: A comparative study. Energy Procedia 2017, 117, 236–243. [Google Scholar] [CrossRef]
- Kim, H.-Y.; Kim, M.-K.; Kim, S. Multi-Objective Scheduling Optimization Based on a Modified Non-Dominated Sorting Genetic Algorithm-II in Voltage Source Converter. Energies 2017, 10, 986. [Google Scholar] [CrossRef] [Green Version]
- Tan, K.M.; Ramachandaramurthy, V.K.; Yong, J.Y. Integration of electric vehicles in smart grid: A review on vehicle to grid technologies and optimization techniques. Renew. Sustain. Energy Rev. 2016, 53, 720–732. [Google Scholar] [CrossRef]
- Sarabi, S.; Davigny, A.; Courtecuisse, V.; Riffonneau, Y.; Robyns, B. Potential of vehicle-to-grid ancillary services considering the uncertainties in plug-in electric vehicle availability and service/localization limitations in distribution grids. Appl. Energy 2016, 171, 523–540. [Google Scholar] [CrossRef]
- Hu, J.; Morais, H.; Sousa, T.; Lind, M. Electric vehicle fleet management in smart grids: A review of services, optimization and control aspects. Renew. Sustain. Energy Rev. 2016, 56, 1207–1226. [Google Scholar] [CrossRef] [Green Version]
- Sousa, T.; Soares, T.; Morais, H.; Castro, R.; Vale, Z. Simulated annealing to handle energy and ancillary services joint management considering electric vehicles. Electr. Power Syst. Res. 2016, 136, 383–397. [Google Scholar] [CrossRef]
- Knezović, K.; Marinelli, M.; Zecchino, A.; Andersen, P.B.; Traeholt, C. Supporting involvement of electric vehicles in distribution grids: Lowering the barriers for a proactive integration. Energy 2017, 134, 458–468. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Chowdhury, M.; Bhavsar, P.; He, Y. Optimizing the performance of vehicle-to-grid (V2G) enabled battery electric vehicles through a smart charge scheduling model. Int. J. Automot. Technol. 2015, 16, 827–837. [Google Scholar] [CrossRef]
- Leo, M.; Kavi, K.; Anders, H.; Moss, B. Ancillary Service Revenue Opportunities from Electric Vehicles via Demand Response; School of Natural Resources and Environment University of Michigan: Ann Arbor, MI, USA, 2011. [Google Scholar]
- Shi, W.; Wong, V.W.S. Real-time vehicle-to-grid control algorithm under price uncertainty. In Proceedings of the International Conference on Smart Grid Communications (SmartGridComm), Brussels, Belgium, 17–20 October 2011. [Google Scholar]
- He, Y.; Venkatesh, B.; Guan, L. Optimal scheduling for charging and discharging of electric vehicles. IEEE Trans. Smart Grid 2012, 3, 1095–1105. [Google Scholar] [CrossRef]
- Jin, C.; Tang, J.; Ghosh, P. Optimizing electric vehicle charging: A customer’s perspective. IEEE Trans. Veh. Technol. 2013, 62, 2919–2927. [Google Scholar] [CrossRef]
- Richardson, P.; Flynn, D.; Keane, A. Local versus centralized charging strategies for electric vehicles in low voltage distribution systems. IEEE Trans. Smart Grid. 2011, 3, 1020–1028. [Google Scholar] [CrossRef]
- Sen, G.D.; Sharma, J.; Goyal, G.R.; Singh, A.K. A Multi-objective PSO (MOPSO) algorithm for optimal active power dispatch with pollution control. IIETA 2017, 4, 113–119. [Google Scholar] [CrossRef]
- Bakker, H.; Dunke, F.; Nickel, S. A structuring review on multi-stage optimization under uncertainty: Aligning concepts from theory and practice. Omega 2020, 96, 102080. [Google Scholar] [CrossRef]
- Kolawole, O.; Al-Anbagi, I. Electric Vehicles Battery Wear Cost Optimization for Frequency Regulation Support. IEEE Access 2019, 7, 130388–130398. [Google Scholar] [CrossRef]
- Liang, H.; Liu, Y.; Li, F.; Shen, Y. Dynamic Economic/Emission Dispatch Including PEVs for Peak Shaving and Valley Filling. IEEE Trans. Ind. Electron. 2019, 66, 2880–2890. [Google Scholar] [CrossRef]
- Maigha; Crow, M.L. Electric Vehicle Scheduling Considering Co-Optimized Customer and System Objectives. IEEE Trans. Sustain. Energy 2018, 9, 410–419. [Google Scholar] [CrossRef]
- Sharma, I.; Cañizares, C.; Bhattacharya, K. Smart Charging of PEVs Penetrating into Residential Distribution Systems. IEEE Trans. Smart Grid 2014, 5, 1196–1209. [Google Scholar] [CrossRef]
- García-Villalobos, J.; Zamora, I.; Knezović, K.; Marinelli, M. Multi-objective optimization control of plug-in electric vehicles in low voltage distribution networks. Appl. Energy 2016, 180, 155–168. [Google Scholar] [CrossRef] [Green Version]
- Jabalameli, N.; Su, X.; Ghosh, A. Online Centralized Charging Coordination of PEVs with Decentralized Var Discharging for Mitigation of Voltage Unbalance. IEEE Power Energy Technol. Syst. J. 2019, 6, 152–161. [Google Scholar] [CrossRef]
- Kikhavani, M.R.; Hajizadeh, A.; Shahirinia, A. Charging coordination and load balancing of plug-in electric vehicles in unbalanced low-voltage distribution systems. IET Gener. Transm. Distrib. 2020, 14, 389–399. [Google Scholar] [CrossRef]
- Nafisi, H.; Agah, S.M.M.; Abyaneh, H.A.; Abedi, M. Two-Stage Optimization Method for Energy Loss Minimization in Microgrid Based on Smart Power Management Scheme of PHEVs. IEEE Trans. Smart Grid 2016, 7, 1268–1276. [Google Scholar] [CrossRef]
- Islam, M.R.; Lu, H.; Hossain, J.; Islam, M.R.; Li, L. Multi-objective Optimization Technique for Mitigating Unbalance and Improving Voltage Considering Higher Penetration of Electric Vehicles and Distributed Generation. IEEE Syst. J. 2020, 14, 3676–3686. [Google Scholar] [CrossRef]
- Manbachi, M.; Farhangi, H.; Palizban, A.; Arzanpour, S. A novel Volt-VAR Optimization engine for smart distribution networks utilizing Vehicle to Grid dispatch. Int. J. Electr. Power Energy Syst. 2016, 74, 238–251. [Google Scholar] [CrossRef]
- Monteiro, V.; Pinto, J.G.; Exposto, B.; Goncalves, H.; Ferreira, J.C.; Couto, C. Assessment of a battery charger for electric vehicles with reactive power control. In Proceedings of the IEEE IECON 2012: 38th Annual Conference on Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012. [Google Scholar]
- Kisacikoglu, M.C.; Ozpineci, B.; Tolbert, L.M. Examination of a PHEV bidirectional charger system for V2G reactive power compensation. In Proceedings of the IEEE APEC 2010: Twenty-Fifth Annual Applied Power Electronics Conference, Plam Spring, CA, USA, 22–25 February 2010. [Google Scholar]
- Kisacikoglu, M.C.; Ozpineci, B.; Tolbert, L.M. Reactive power operation analysis of a single-phase EV/PHEV bidirectional battery charger. In Proceedings of the IEEE ICPE & ECCE 2011: 8th International Conference on Power Electronics and ECCE Asia, Jeju, Korea, 30 May–3 June 2011. [Google Scholar]
- IEEE. IEEE Recommended Practice for Monitoring Electric Power Quality 1159–1995; Institute of Electrical and Electronics Engineers, Inc.: New York, NY, USA, 1995; pp. 1–80. [Google Scholar]
- Farzin, H.; Fotuhi-Firuzabad, M.; Moeini-Aghtaie, M. A Practical Scheme to Involve Degradation Cost of Lithium-Ion Batteries in Vehicle-to-Grid Applications. IEEE Trans. Sustain. Energy 2016, 7, 1730–1738. [Google Scholar] [CrossRef]
- Fasugba, M.A.; Krein, P.T. Gaining vehicle-to-grid benefits with unidirectional electric and plug-in hybrid vehicle chargers. In Proceedings of the 2011 IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 6–9 September 2011. [Google Scholar]
- Yang, X.S. Engineering Optimisation: An Introduction with Metaheuristic Applications; John Wiley and Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Babaei, S.; Steen, D.; Tuan, L.A.; Carlson, O.; Bertling, L. Effects of Plug-in Electric Vehicles on distribution systems: A real case of Gothenburg. In Proceedings of the 2010 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT Europe), Gothenberg, Sweden, 11–13 October 2010. [Google Scholar]
- Mahat, P.; Handl, M.; Kanstrup, K.R.; Lozano, A.P.; Sleimovits, A. Price based electric vehicle charging. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012. [Google Scholar]
- Nissan Leaf 24 kWh & 30 kWh Charging Guide. Available online: https://www.zap-map.com/charge-points/Nissan-leaf-2430kwh-charging-guide/ (accessed on 1 October 2020).
- Akbari, M.; Brenna, M.; Longo, M. Optimal Locating of Electric Vehicle Charging Stations by Application of Genetic Algorithm. Sustainability 2018, 10, 1076. [Google Scholar] [CrossRef] [Green Version]
- Darabi, Z.; Ferdowsi, M. Aggregated Impact of Plug-in Hybrid Electric Vehicles on Electricity Demand Profile. IEEE Trans. Sustain. Energy 2011, 2, 501–508. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Related Work | Customer Objective Function | System Objective Function | V2G Technology | |||
|---|---|---|---|---|---|---|
| Charging Cost | Battery Degradation | Voltage Unbalance | Voltage Deviation | V2G in Active Power | V2G in Reactive Power | |
| [30] | ✓ | ✓ | - | - | ✓ | - |
| [31] | - | ✓ | - | - | ✓ | - |
| [32] | ✓ | ✓ | - | - | ✓ | - |
| [33] | ✓ | - | - | ✓ | - | - |
| [34] | ✓ | - | ✓ | ✓ | ✓ | - |
| [35] | - | - | ✓ | ✓ | - | ✓ |
| [36] | - | - | ✓ | ✓ | ✓ | - |
| [37] | - | - | - | ✓ | ✓ | ✓ |
| [38] | - | - | ✓ | ✓ | - | - |
| Proposed Method | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| Phase A | Phase B | Phase C | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| EV Bus Connection | 816 | 824 | 854 | 842 | 846 | 816 | 824 | 854 | 842 | 846 | 816 | 824 | 854 | 842 | 846 |
| 30% (162 EVs) | 22 | 1 | 0 | 21 | 0 | 5 | 0 | 41 | 15 | 21 | 0 | 21 | 15 | 0 | 0 |
| 50% (271 EVs) | 32 | 11 | 0 | 31 | 0 | 20 | 0 | 51 | 25 | 31 | 0 | 31 | 35 | 4 | 0 |
| 75% (407 EVs) | 45 | 23 | 4 | 43 | 10 | 23 | 4 | 63 | 37 | 43 | 13 | 43 | 37 | 15 | 4 |
| 100% (542 EVs) | 55 | 32 | 13 | 52 | 19 | 32 | 13 | 72 | 46 | 51 | 22 | 52 | 46 | 24 | 13 |
| Parameter | Value |
|---|---|
| 24 kWh | |
| 0.4 p.u | |
| 0.3 p.u | |
| 7.68 kW | |
| 7.2 kW | |
| Obtained from Figure 6 | |
| 0.324 EUR/kWh | |
| Obtained from Figure 5 | |
| 95% | |
| 1 h | |
| 93% | |
| 93% | |
| 110.97 EUR/kWh | |
| 60% of CC | |
| 2.22 | |
| 0.00015 kWh/kWh | |
| 1035.19 days (3 years) | |
| 706.214 days (2 years) | |
| 0.179 EUR/kWh | |
| 0.122 EUR/kWh |
| Parameter | Value |
|---|---|
| c1 | 1.4962 |
| c2 | 1.4962 |
| Iteration | 50 |
| Population size | 25 |
| Weight for VUF in Stage 1 (θ1) | 0.5 |
| Weight for CC in Stage 1 (θ2) | 0.25 |
| Weight for BC in Stage 1 (θ3) | 0.25 |
| 100% Penetration | Weekday | Uncontrolled Charging | Method 1 | Method 2 | Method 3 | Proposed Method |
|---|---|---|---|---|---|---|
| Winter | Max VUF (%) | 2.1 | 2.2 | 4 | 2 | 1.98 |
| Min Voltage (p.u) | 0.825 | 0.94 | 0.94 | 0.95 | 0.97 | |
| Max Voltage (p.u) | 1 | 1 | 1 | 0.98 | 1.01 | |
| Total Cost (EUR/day) | −3.00 | −2.70 | −2.47 | −4.15 | −1.723 | |
| Summer | Max VUF (%) | 2.1 | 2.2 | 4 | 2.1 | 1.98 |
| Min Voltage (p.u) | 0.82 | 0.925 | 0.94 | 0.935 | 0.98 | |
| Max Voltage (p.u) | 1 | 1.01 | 1 | 0.99 | 1.02 | |
| Total Cost (EUR/day) | −3.015 | −2.9 | −2.4 | −3.61 | −1.99 | |
| Spring | Max VUF (%) | 2.1 | 2.5 | 5 | 2.1 | 1.95 |
| Min Voltage (p.u) | 0.85 | 0.925 | 0.94 | 0.925 | 0.975 | |
| Max Voltage (p.u) | 1 | 1.01 | 1 | 0.97 | 1.01 | |
| Total Cost (EUR/day) | −3.006 | −2.75 | −2.169 | −4.21 | −1.94 | |
| 100% Penetration | Winter | Uncontrolled Charging | Method 1 | Method 2 | Method 3 | Proposed Method |
|---|---|---|---|---|---|---|
| Weekday | Max VUF (%) | 2.1 | 2.2 | 4 | 2 | 1.98 |
| Min Voltage (p.u) | 0.825 | 0.94 | 0.94 | 0.95 | 0.97 | |
| Max Voltage (p.u) | 1 | 1 | 1 | 0.98 | 1.01 | |
| Total Cost (EUR/day) | −3.00 | −2.70 | −2.47 | −4.15 | −1.723 | |
| Weekend | Max VUF (%) | 2 | 2.25 | 3.8 | 2 | 1.98 |
| Min Voltage (p.u) | 0.89 | 0.96 | 0.97 | 0.97 | 0.99 | |
| Max Voltage (p.u) | 1.01 | 1.03 | 1.01 | 1.01 | 1.02 | |
| Total Cost (EUR/day) | −2.33 | −2.11 | −2.42 | −4.18 | −1.76 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Boonseng, T.; Sangswang, A.; Naetiladdanon, S.; Gurung, S. A New Two-Stage Approach to Coordinate Electrical Vehicles for Satisfaction of Grid and Customer Requirements. Appl. Sci. 2021, 11, 3904. https://doi.org/10.3390/app11093904
Boonseng T, Sangswang A, Naetiladdanon S, Gurung S. A New Two-Stage Approach to Coordinate Electrical Vehicles for Satisfaction of Grid and Customer Requirements. Applied Sciences. 2021; 11(9):3904. https://doi.org/10.3390/app11093904
Chicago/Turabian StyleBoonseng, Trinnapop, Anawach Sangswang, Sumate Naetiladdanon, and Samundra Gurung. 2021. "A New Two-Stage Approach to Coordinate Electrical Vehicles for Satisfaction of Grid and Customer Requirements" Applied Sciences 11, no. 9: 3904. https://doi.org/10.3390/app11093904
APA StyleBoonseng, T., Sangswang, A., Naetiladdanon, S., & Gurung, S. (2021). A New Two-Stage Approach to Coordinate Electrical Vehicles for Satisfaction of Grid and Customer Requirements. Applied Sciences, 11(9), 3904. https://doi.org/10.3390/app11093904