
Individual Adjustment of Contraction Parameters for Effective Swing Assist Using a Pneumatic Artificial Muscle in the Elderly



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Featured Application
Abstract
1. Introduction
2. Materials and Methods
2.1. Participants
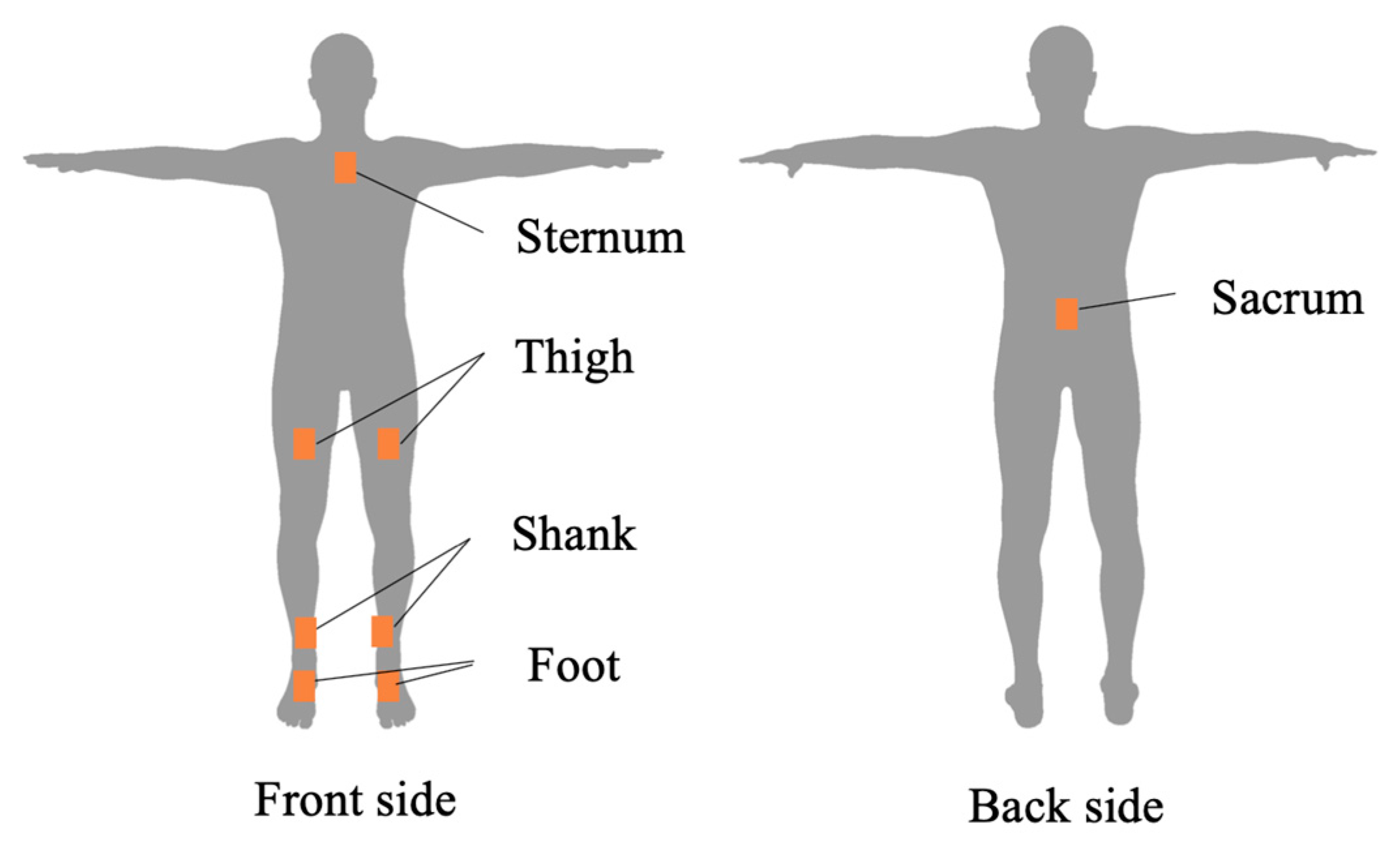
2.2. Experimental Setup
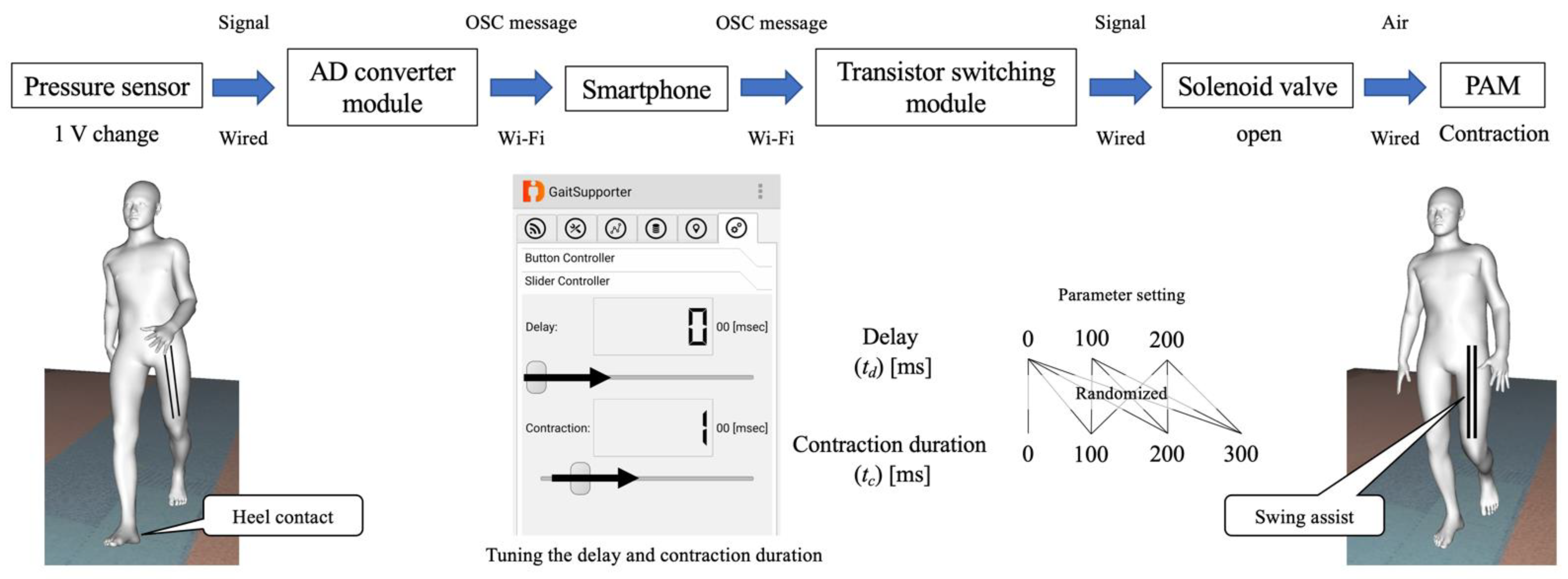
2.3. Control of PAM Driver
2.4. Data Collection
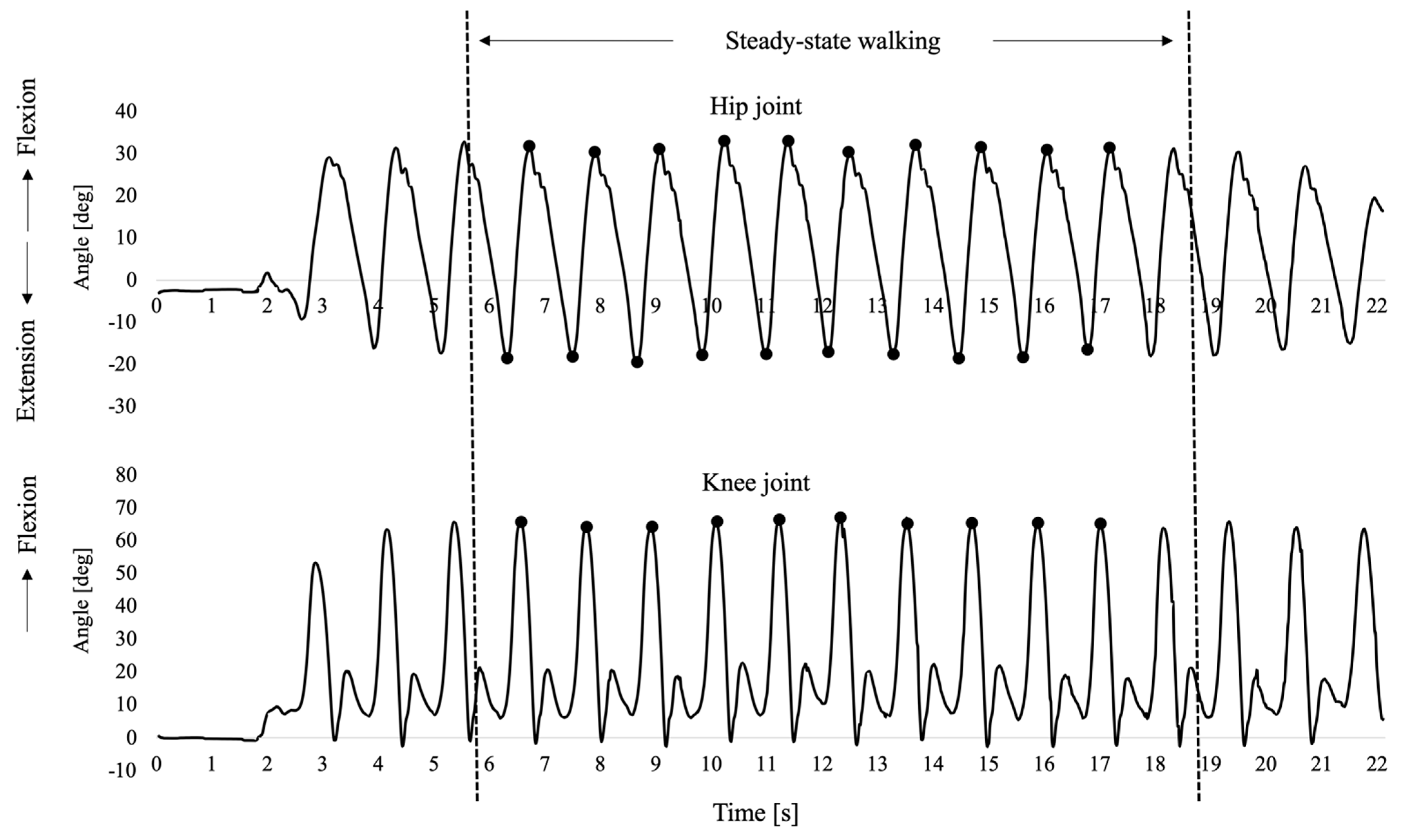
2.5. Data Analysis
3. Results
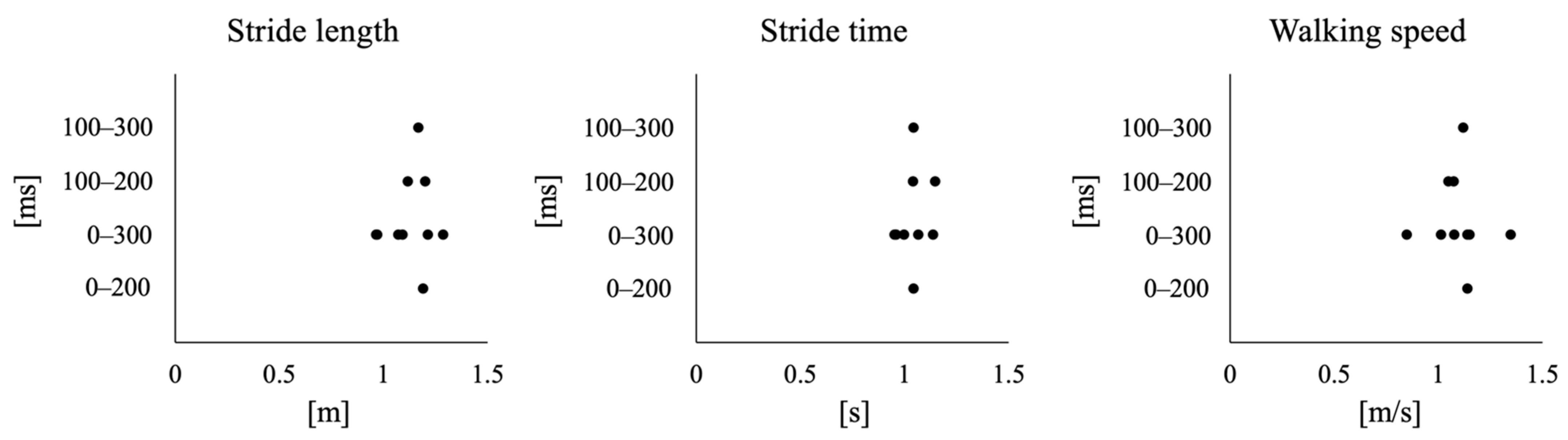
3.1. Effective Parameter Settings for Each Participant
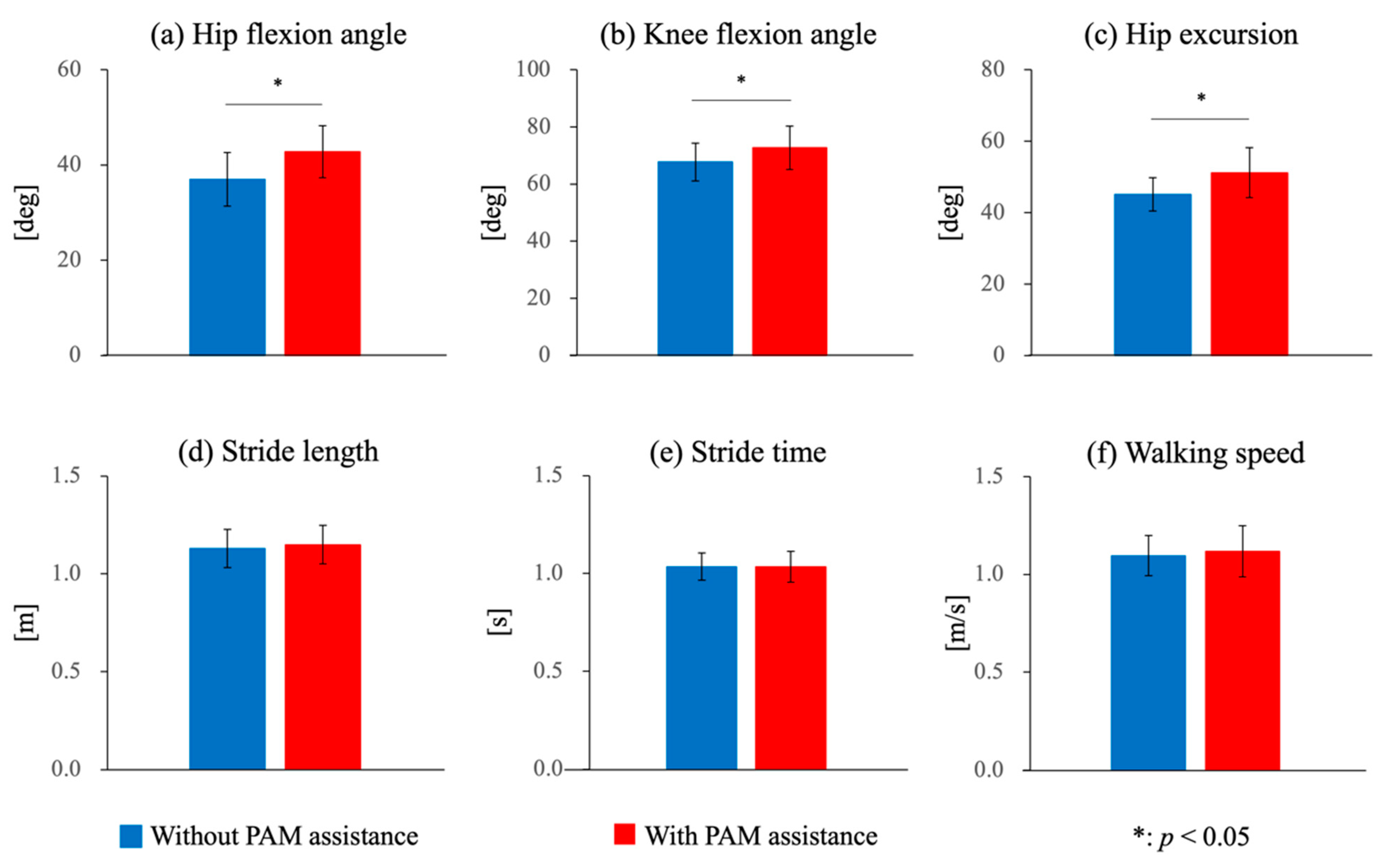
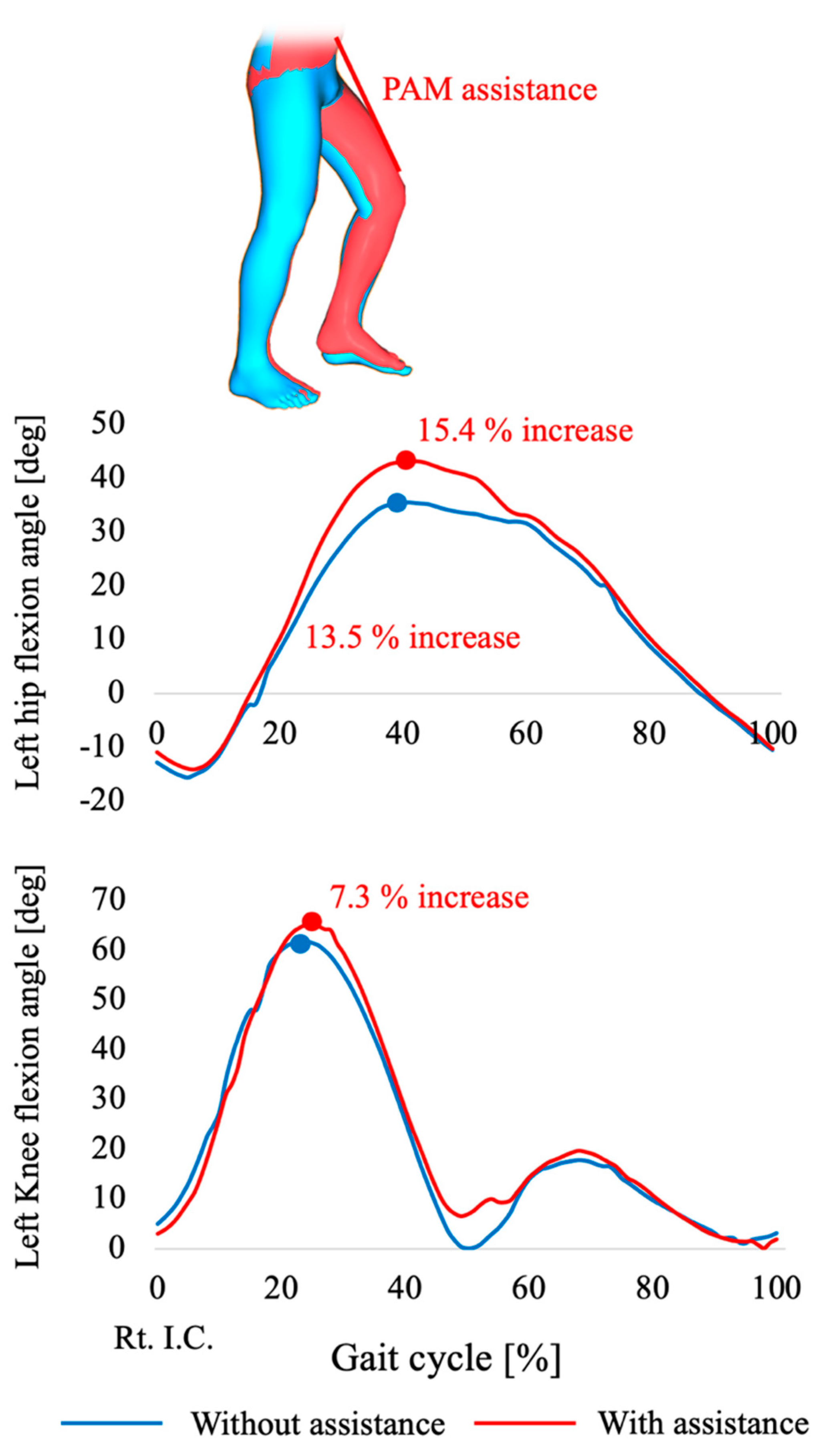
3.2. Differences between Cases with and without PAM Assistance
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Annual Report on the Aging Society. Available online: https://www8.cao.go.jp/kourei/whitepaper/index-w.html (accessed on 12 February 2021).
- Berg, W.P.; Alessio, H.M.; Mills, E.M.; Tong, C. Circumstances and consequences of falls in independent community-dwelling older adults. Age Ageing 1997, 26, 261–268. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Begg, R.; Best, R.; Dell’Oro, L.; Taylor, S. Minimum foot clearance during walking: Strategies for the minimisation of trip-related falls. Gait Posture 2007, 25, 191–198. [Google Scholar] [CrossRef]
- Mills, P.M.; Barrett, R.S.; Morrison, S. Toe clearance variability during walking in young and elderly men. Gait Posture 2008, 28, 101–107. [Google Scholar] [CrossRef] [Green Version]
- Barrett, R.S.; Mills, P.M.; Begg, R.K. A systematic review of the effect of ageing and falls history on minimum foot clearance characteristics during level walking. Gait Posture 2010, 32, 429–435. [Google Scholar] [CrossRef] [PubMed]
- Moosabhoy, M.A.; Gard, S.A. Methodology for determining the sensitivity of swing leg toe clearance and leg length to swing leg joint angles during gait. Gait Posture 2006, 24, 493–501. [Google Scholar] [CrossRef]
- Murray, M.P.; Kory, R.C.; Clarkson, B.H. Walking patterns in healthy old men. J. Gerontol. 1969, 24, 169–178. [Google Scholar] [CrossRef] [PubMed]
- Olney, S.J.; Richards, C. Hemiparetic gait following stroke. Part I: Characteristics. Gait Posture 1996, 4, 136–148. [Google Scholar] [CrossRef]
- Bruni, M.F.; Melegari, C.; De Cola, M.C.; Bramanti, A.; Bramanti, P.; Calabrò, R.S. What does best evidence tell us about robotic gait rehabilitation in stroke patients: A systematic review and meta-analysis. J. Clin. Neurosci. 2018, 48, 11–17. [Google Scholar] [CrossRef] [PubMed]
- Langhorne, P.; Bernhardt, J.; Kwakkel, G. Stroke rehabilitation. Lancet 2011, 377, 1693–1702. [Google Scholar] [CrossRef]
- Wallard, L.; Dietrich, G.; Kerlirzin, Y.; Bredin, J. Effects of robotic gait rehabilitation on biomechanical parameters in the chronic hemiplegic patients. Neurophysiol. Clin. 2015, 45, 215–219. [Google Scholar] [CrossRef] [PubMed]
- Van Kammen, K.; Boonstra, A.M.; Van Der Woude, L.H.V.; Visscher, C.; Reinders-Messelink, H.A.; Den Otter, R. Lokomat guided gait in hemiparetic stroke patients: The effects of training parameters on muscle activity and temporal symmetry. Disabil. Rehabil. 2019, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Thakur, C.; Ogawa, K.; Tsuji, T.; Kurita, Y. Soft wearable augmented walking suit with pneumatic gel muscles and stance phase detection system to assist gait. IEEE Robot. Autom. Lett. 2018, 3, 4257–4264. [Google Scholar] [CrossRef]
- Toda, H.; Tada, M.; Maruyama, T.; Kurita, Y. Optimal swing support during walking using wireless pneumatic artificial muscle driver. J. Robot. Mechatron. 2021, 33, 379–385. [Google Scholar] [CrossRef]
- Hong, J.-C.; Suzuki, S.; Fukushima, Y.; Yasuda, K.; Ohashi, H.; Iwata, H. Development of high-dorsiflexion assistive robotic technology for gait rehabilitation. In Proceedings of the 2018 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Miyazaki, Japan, 7–10 October 2018; pp. 3801–3806. [Google Scholar] [CrossRef]
- Park, Y.-L.; Chen, B.-R.; Pérez-Arancibia, N.O.; Young, D.; Stirling, L.; Wood, R.J.; Goldfield, E.C.; Nagpal, R. Design and control of a bio-inspired soft wearable robotic device for ankle–foot rehabilitation. Bioinsp. Biomim. 2014, 9, 016007. [Google Scholar] [CrossRef] [PubMed]
- Thakur, C.; Ogawa, K.; Kurita, Y. Active passive nature of assistive wearable gait augment suit for enhanced mobility. J. Rob. Mech. 2018, 30, 717–728. [Google Scholar] [CrossRef]
- Miyazaki, T.; Tagami, T.; Morisaki, D.; Miyazaki, R.; Kawase, T.; Kanno, T.; Kawashima, K. A motion control of soft gait assistive suit by gait phase detection using pressure information. Appl. Sci. 2019, 9, 2869. [Google Scholar] [CrossRef] [Green Version]
- Tada, M. Wireless sensor and display modules for on-site motion measurement and intervention. In Proceedings of the 19th System Integration Symposium, Hiroshima, Japan, 5–8 June 2019; pp. 418–422. (In Japanese). [Google Scholar]
- Toda, H.; Tada, M.; Maruyama, T.; Kurita, Y. Effect of contraction parameters on swing support during walking using wireless pneumatic artificial muscle driver: A preliminary study. In Proceedings of the 58th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE), Hiroshima, Japan, 10–13 September 2019; pp. 727–732. [Google Scholar] [CrossRef]
- Begg, R.K.; Sparrow, W.A. Ageing effects on knee and ankle joint angles at key events and phases of the gait cycle. J. Med. Eng. Technol. 2006, 30, 382–389. [Google Scholar] [CrossRef]
- Nagano, H.; Begg, R.K.; Sparrow, W.A.; Taylor, S. A comparison of treadmill and overground walking effects on step cycle asymmetry in young and older individuals. J. Appl. Biomech. 2013, 29, 188–193. [Google Scholar] [CrossRef]
- Desai, A.; Goddman, V.; Kapadia, N.; Shay, B.L.; Szturm, T. Relationship between measures and functional performance in community-dwelling elderly people. Phys. Ther. 2010, 90, 748–760. [Google Scholar] [CrossRef]
- Endo, Y.; Tada, M.; Mochimaru, M. Dhaiba: Development of virtual ergonomic assessment system with human models. In Proceedings of the 3rd International Digital Human Symposium, Tokyo, Japan, 20–22 May 2014. [Google Scholar]
- Maruyama, T.; Toda, H.; Ishii, W.; Tada, M. Inertial measurement unit to segment calibration based on physically constrained pose generation. SICE J. Control Meas. Syst. Integ. 2020, 13, 122–130. [Google Scholar] [CrossRef]
- Maruyama, T.; Toda, H.; Kanoga, S.; Tada, M.; Endo, Y. Accuracy evaluation of human gait estimation by a sparse set of inertial measurement units. Act. Behav. Comput. 2020, 51–61. [Google Scholar] [CrossRef]
- Mann, R.A.; Hagy, J.L.; White, V.; Liddell, D. The initiation of gait. J. Bone Jt. Surg. Am. 1979, 61, 232–239. [Google Scholar] [CrossRef]
- Murray, M.P.; Drought, A.B.; Kory, R.C. Walking patterns of normal men. JBJS 1964, 46, 335–360. [Google Scholar] [CrossRef]
- Kerrigan, D.C.; Todd, M.K.; Della Croce, U.; Lipsitz, L.A.; Collins, J.J. Biomechanical gait alterations independent of speed in the healthy elderly: Evidence for specific limiting impairments. Arch. Phys. Med. Rehabil. 1998, 79, 317–322. [Google Scholar] [CrossRef]
- Smidt, G.L. Hip motion and related factors in walking. Phys. Ther. 1971, 51, 9–22. [Google Scholar] [CrossRef] [PubMed]
- Ciprandi, D.; Zago, M.; Bertozzi, F.; Sforza, C.; Galvani, C. Influence of energy cost and physical fitness on the preferred walking speed and gait variability in elderly women. J. Electromyogr. Kinesiol. 2018, 43, 1–6. [Google Scholar] [CrossRef]
- Kerrigan, D.C.; Todd, M.K.; Croce, U.D. Gender differences in joint biomechanics during walking; Normative study in young adults. Am. J. Phys. Med. Rehabil. 1998, 77, 2–7. [Google Scholar] [CrossRef] [PubMed]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Toda, H.; Maruyama, T.; Kurita, Y.; Tada, M. Individual Adjustment of Contraction Parameters for Effective Swing Assist Using a Pneumatic Artificial Muscle in the Elderly. Appl. Sci. 2021, 11, 4308. https://doi.org/10.3390/app11094308
Toda H, Maruyama T, Kurita Y, Tada M. Individual Adjustment of Contraction Parameters for Effective Swing Assist Using a Pneumatic Artificial Muscle in the Elderly. Applied Sciences. 2021; 11(9):4308. https://doi.org/10.3390/app11094308
Chicago/Turabian StyleToda, Haruki, Tsubasa Maruyama, Yuichi Kurita, and Mitsunori Tada. 2021. "Individual Adjustment of Contraction Parameters for Effective Swing Assist Using a Pneumatic Artificial Muscle in the Elderly" Applied Sciences 11, no. 9: 4308. https://doi.org/10.3390/app11094308
APA StyleToda, H., Maruyama, T., Kurita, Y., & Tada, M. (2021). Individual Adjustment of Contraction Parameters for Effective Swing Assist Using a Pneumatic Artificial Muscle in the Elderly. Applied Sciences, 11(9), 4308. https://doi.org/10.3390/app11094308