2. Problem
In order to be able to use zinc–air batteries, however, adapted battery management systems are required. Battery management systems are electronic circuits that ensure the safe state of the battery systems and monitor and control the charging and discharging processes of the batteries. Their protective functions include, for example, deep discharge protection, overcharge protection and overcurrent protection. For these essential functions to work safely, the state of charge (SoC) of the respective cell must be known or determinable. In current cell technologies, the cell voltage is usually used for this purpose, as typically the cell voltage of an empty cell is lower than that of a full cell. Deep discharge protection is also necessary for lead–acid and lithium-ion batteries, as this can disable the battery. In lithium-ion batteries, even a slight deep discharge leads to irreversible damage and loss of capacity. In the case of a significant deep discharge, it is even likely that copper bridges will form, leading to a short circuit. In this condition, the cell becomes unstable and heats up very strongly, creating a fire hazard [
23].
Deep discharge should also be avoided for zinc–air batteries. Although there is no fire hazard here, a loss of capacity, performance, and lifetime is to be expected. In the charged state, the zinc anode consists mainly of metallic zinc and is therefore mechanically stable. During deep states of discharge, the zinc oxidizes to zincate, which mixes within the electrolyte to form a viscous paste. Due to gravity, the anode mass now slowly sinks towards the bottom of the cell and the anode surface area decreases along with a loss of capacity and power. If the cell remains in a SoC that is too low for a longer period of time, more and more anode mass accumulates at the bottom of the cell and flows towards the counter electrode. Once this is reached, a short circuit occurs, preventing further battery operation. Therefore, zinc–air batteries must also be protected against deep discharge to ensure a long cycle life.
Overcharging can also damage batteries. When various lithium-ion batteries are overcharged, metallic lithium can be reduced and accumulated at the cathode; this can also result in the release of oxygen at the anode. In an ideal case, the produced oxygen will outgas through a safety valve. Otherwise, it reacts with the electrolyte or the anode. As a result, the accumulator heats up and can even catch fire [
24,
25]. Less critical is the electrolysis that occurs when a zinc–air battery is overcharged. The water component of the electrolyte outgasses during this process, and the electrolyte level drops so that some of the anodes can no longer be used for battery operation. In addition to the loss of liquid and capacity, the electrolyte concentration also increases. Typically, the initial concentration is selected to achieve maximum conductivity. The change in concentration therefore additionally leads to reduced cell performance by increasing losses. Although it is possible for zinc–air batteries to compensate for the loss with distilled water, overcharging the cells should generally be avoided for the reasons mentioned.
In order for these essential protective functions can work, the SoC of the respective cell must be known or determinable. In current cell technologies, the cell voltage is usually used for this purpose, as typically the cell voltage of an empty cell is lower than that of a full cell [
26]. The Nernst equation can be used to estimate the resulting change of the open circuit voltage. The Nernst equation describes the dependence of the electrode potential of a redox couple on temperature and concentration [
27,
28]:
where
corresponds to the standard electrode potential at normal conditions,
R is the universal gas constant,
T specifies the absolute temperature, and
z defines the number of electrons transferred in the reaction. In order to determine the voltage change due to the SoC, these variables can be considered constant. In contrast, the SoC is a key determinant of the activity of the redox partner (
and
, respectively). The activity indicates the concentration corresponding to the behavior of a real mixture. As an approximation, the concentration of the reduced or oxidized species and thus the SoC can be used. The Nernst equation describes the behavior at one electrode at a time, so that the differences of both electrodes accumulate. Using the example of a lithium-ion battery, the nominal voltage is
, but a charging cycle of an empty battery starts at
and finishes at
. The resulting voltage difference due to the SoC is
In both lead–acid batteries and lithium-ion cells, the voltage differences are therefore sufficiently high to enable simple detection of the SoC. In individual variants of lithium-ion batteries, the voltage difference can already be reduced in some areas. Lithium-iron phosphate batteries, for example, show only a slight change in cell voltage in the SoC range between 10% and 90% during both charging and discharging, making it difficult to determine the SoC.
When analyzing zinc–air batteries, the change in cell voltage as a function of the SoC is even less significant. Usually, zinc–air batteries use oxygen from the ambient air. The amount of oxygen consumed during discharging or the amount released during charging is relatively small compared to the amount of oxygen in the air, and therefore has only a very small influence on the partial pressure of oxygen in the ambient air. The redox potential of the air electrode therefore shows almost no dependence on the SoC of the cell. Instead, only the zinc anode contributes to the change in open circuit voltage. Applying the Nernst equation to the zinc anode, the activity of the oxidation partner can be assumed to be a constant concentration of KOH solution
. In contrast, the chemical activity of the reduction partner is strongly influenced by the SoC, as it is the ratio
of zincate to zinc:
Unfortunately, the resulting impact is not very distinct as the redox potential difference between a fully charged and a nearly empty battery is about
The influence of the SoC is thus an order of magnitude smaller than with traditional technologies. In particular, the temperature and possible aging of the cell and especially of the electrolyte have a stronger effect on the cell voltage than the SoC. It is therefore not possible to determine the SoC from the open-circuit voltage of a zinc–air cell.
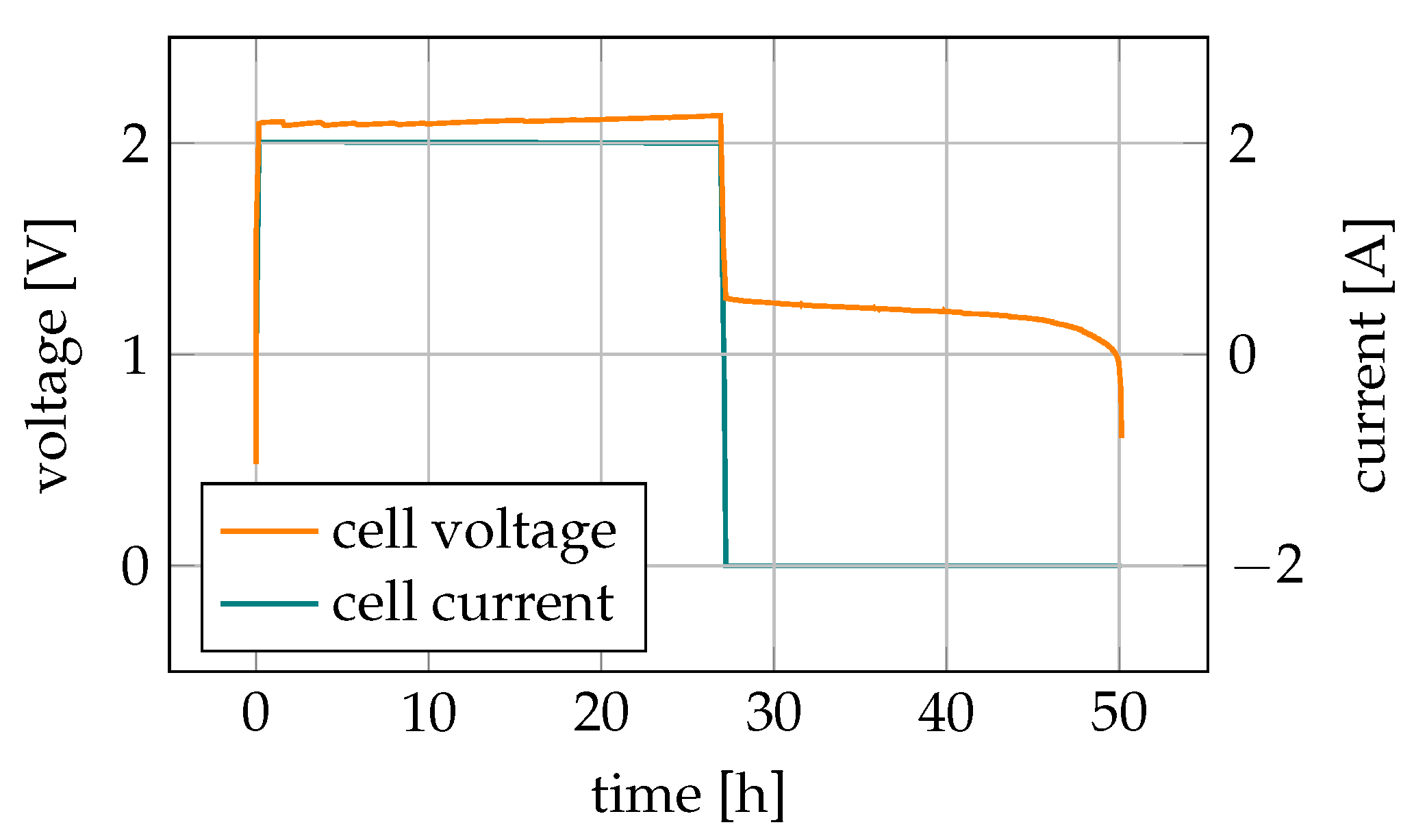
Figure 4 shows the cell voltage of a zinc–air cell during an active charge and discharge cycle. Both the charging process and the discharging process are performed with a constant current. Even with an active charge current, the change in cell voltage over the charge cycle is so small that neither SoC detection nor effective end-of-charge detection is possible from the cell voltage. In addition, it is problematic that, towards the end of the charging process, an accompanying electrolysis process starts at a similar voltage level, so that overcharging with gassing cannot be detected either. The voltage characteristic during the discharge process is also largely constant. Towards the end of the discharge process, however, there is a voltage drop, therefore deep discharge detection is at least possible with the aid of a conventional voltage threshold. While SoC detection is very difficult this way, the behavior on the other hand has the advantage that applications using a zinc–air cell can be optimized for very constant voltage ranges.
In this article, therefore, it is analyzed whether it is possible to develop a method for detecting the SoC of zinc–air batteries with the help of alternative methods. EIS turned out to be a promising measurement technique to obtain measurement data which depend on the SoC. Due to the special electrode arrangement of the used zinc–air cells, an adapted measurement hardware is presented.
The previous approaches always specified a fixed DC current that was used during measuring the impedance spectra [
29,
30,
31]. This principle can also be applied in practice. However, the current working point must then be left in order to use the working point that was used for training the models. When charging, this can lead to situations where energy generated by a photovoltaic system cannot be utilized at this point in time. When discharging, the energy of the new working point may not be sufficient and additional energy from the grid is needed reach the desired working point. In both cases, there is a monetary loss. This article therefore analyzes whether it is also possible to create a model that generalizes the DC current or the working point. In detail, this means that the models are trained with data from different working points and thus an evaluation with different direct currents is also possible. The acquired measurement data are then combined methods of artificial intelligence to determine the SoC as accurately as possible. Therefore the focus is on a model that generalizes the DC current (=the working point) of the battery during an EIS measurement.
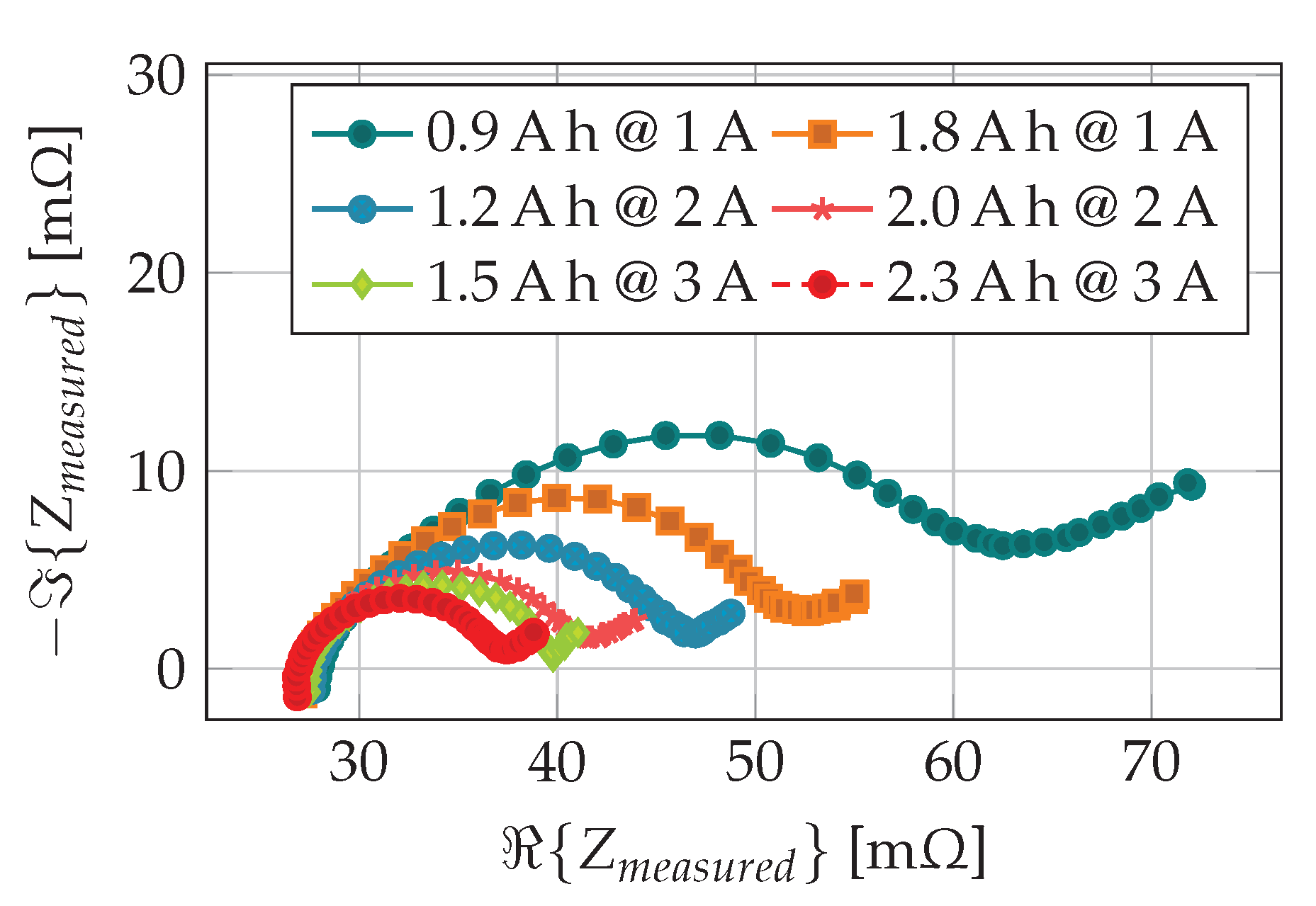
Figure 5 illustrates why this aspect is particularly difficult. The figure shows impedance measurements at different SoC (Ah values) and DC currents (A values). One can see that an increase in the DC current behaves similar to a change in the SoC. Thus, the characteristics are sorted according to their DC currents and not according to the SoC.
3. Setup
EIS determines the impedance, i.e., the AC resistance, of electrochemical systems as a function of the frequency of an AC voltage or current. Electrochemical systems are, for example, batteries. EIS can be used to obtain precious information about the system under investigation and the processes taking place in it. Usually, EIS is performed on batteries by imposing an alternating current, that is, the current of the working electrode is sinusoidally modulated and the resulting voltage and its phase are measured. The DC component of the modulated current is usually set to 0 so that the EIS is charge neutral and the state of charge of the cell is not influenced. Due to the three-electrode technology used in our zinc–air cells, the charge-neutral method cannot be used, as the DC component must be at least as large as the AC amplitude so that there is no switching between charging and discharging during an impedance measurement. The concept of impedance and the complex alternating current theory assume that there is a linear relationship between the amplitudes of voltage and current. In electrochemical systems, this is only the case approximately for small amplitudes, e.g., 1
to 10
[
32]. Significantly larger voltage amplitudes, therefore, must not be used for measurement.
In particular, the necessary DC component during an impedance measurement and the three-electrode technology prevent the use of an existing instrument for the measurement of impedance spectra. Therefore, developments for the measurement of impedance spectra of zinc–air, cells as well as adaptations for existing measuring instruments, are presented in this section.
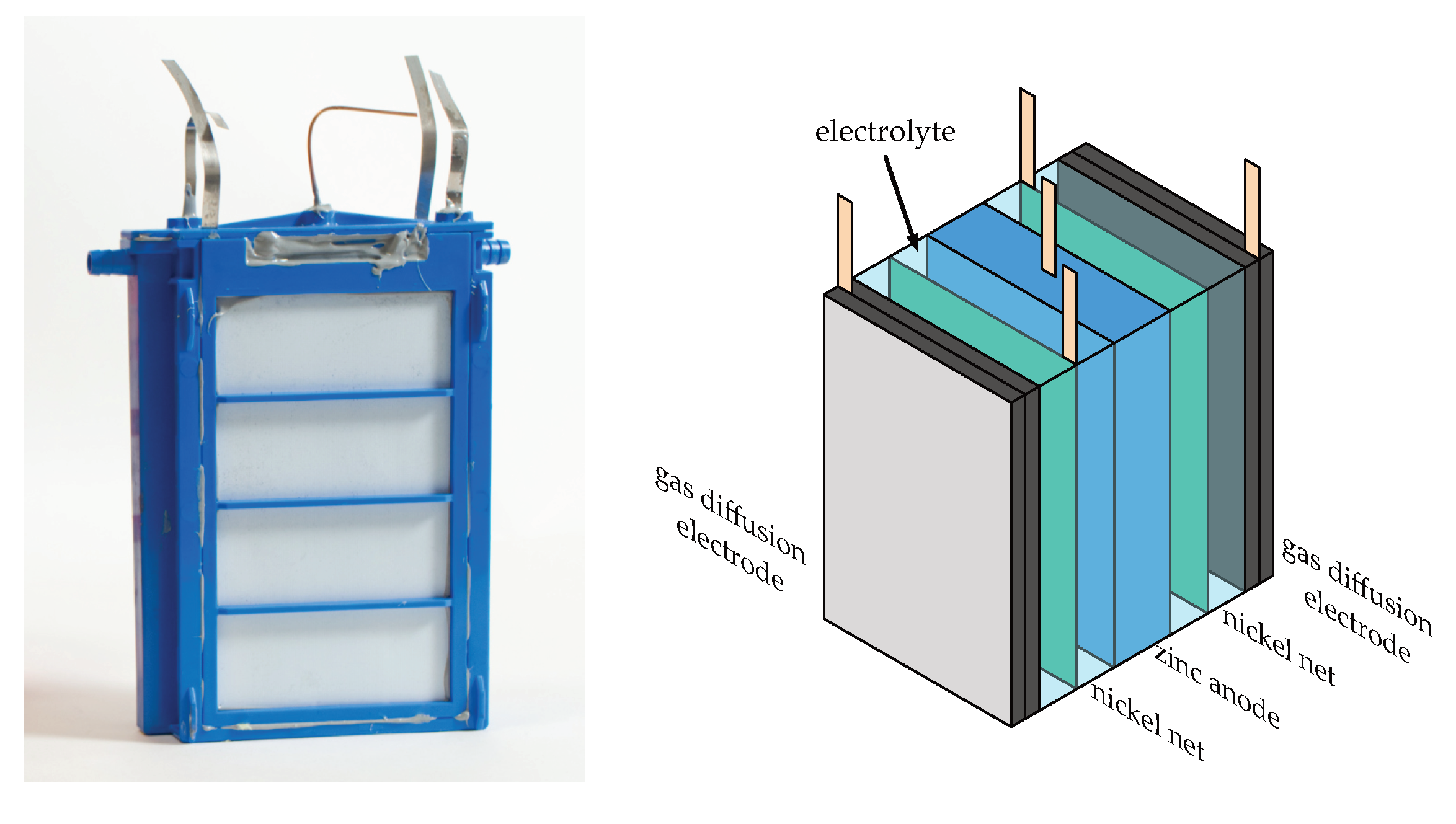
In this article, a rechargeable zinc-air cell from the company 3e Batteriesysteme is used. The cell can be seen in
Figure 6 and has a capacity of 100 Ah.
Figure 6 also shows the schematic diagram of the internal structure. The cell has a symmetrical structure in order to increase the active surface area. Inside the electrolyte there are nickel nets which serve as positive contacts during the charging process.
The overall structure of the developed circuit is shown in
Figure 7. The entire EIS process is controlled by a microcontroller, so that the setup is rather small and field applications are possible. The STM32F4 microcontroller represents the centerpiece of the schematic that controls all of the other peripherals. One of its two digital analog converters is used to output a sine wave at the frequency that is measured. The other digital analog converter creates several constant voltages using a sample and hold circuit that enables the duplication of numbers of outputs as long as constant voltages are being output. These voltages control the amplitude and the offset of the signal. The accuracy of the output signal is kept high, as amplitude and offset are controlled separately. A galvanostatic impedance measurement is preferred, as it is easier to control the current than such a small voltage. Therefore, the output signal is used as input of a current controller that applies the AC current to the battery under test. Last but not least, an external analog digital converter is used to measure both the actual applied AC current and the resulting voltage response of the battery under test. According to MacDonald the amplitude of the voltage response has to remain less than 10
[
32]. Therefore, a high precision, high speed analog digital converter, AD7768-4, is used so that the voltage response can be measured with sufficient accuracy despite the voltage offset of the battery. Offset compensation is thus not necessary.
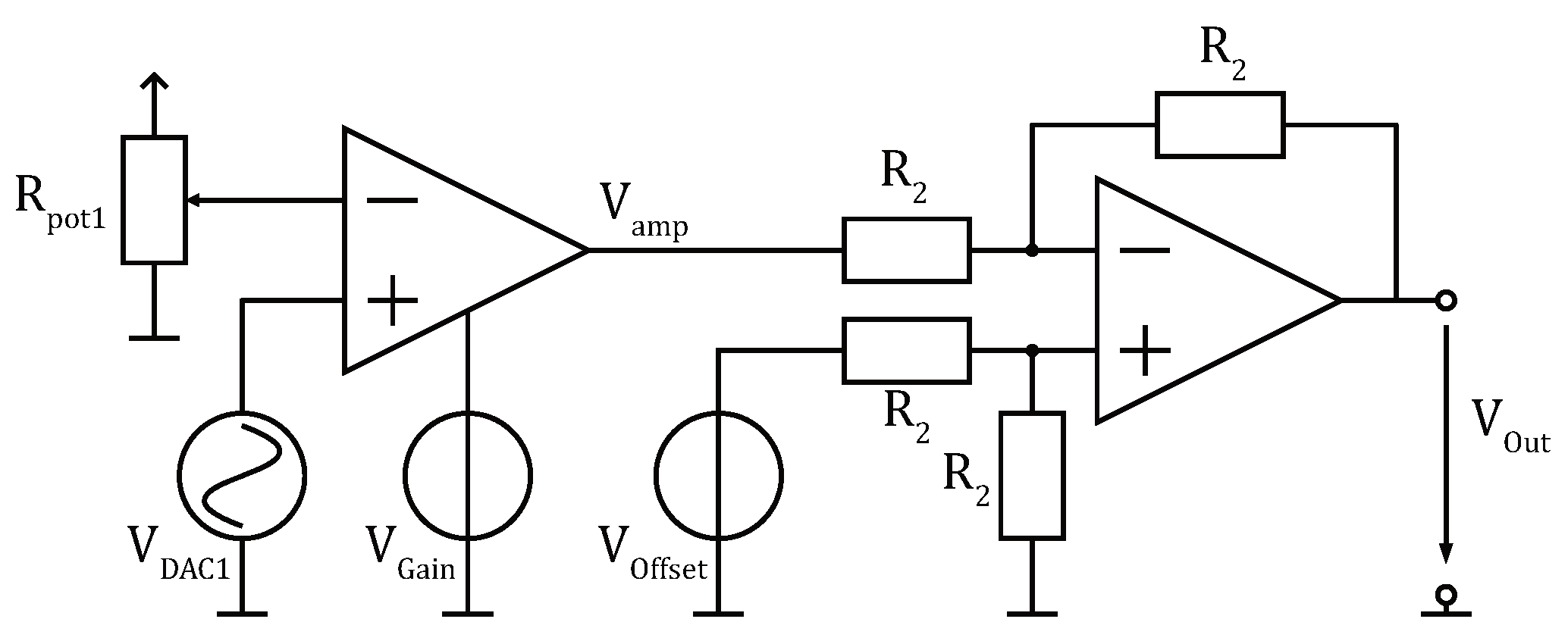
3.1. Signal Generation and Measurement Unit
Figure 8 takes a closer look to the signal generation. The sine voltage
is the digital analog converter output of the microcontroller which oscillates between 0
and
. The left amplifier is the voltage controlled gain amplifier LMH6503. It amplifies its differential input voltage. Therefore,
sets the negative input voltage to
so that the differential input voltage is a symmetrical sine wave. The amplitude of the output signal
can be controlled by
. The components on the right-hand side implement a difference amplifier. As all resistors that belong to this circuit have an equal resistance,
applies to the output voltage. Accordingly, voltage
is inverted and shifted by an offset. As
is a symmetrical sine wave, and only the phase difference between the applied current and the voltage response is evaluated for determining the impedance, an inversion of
does not have any impact on the measurement.
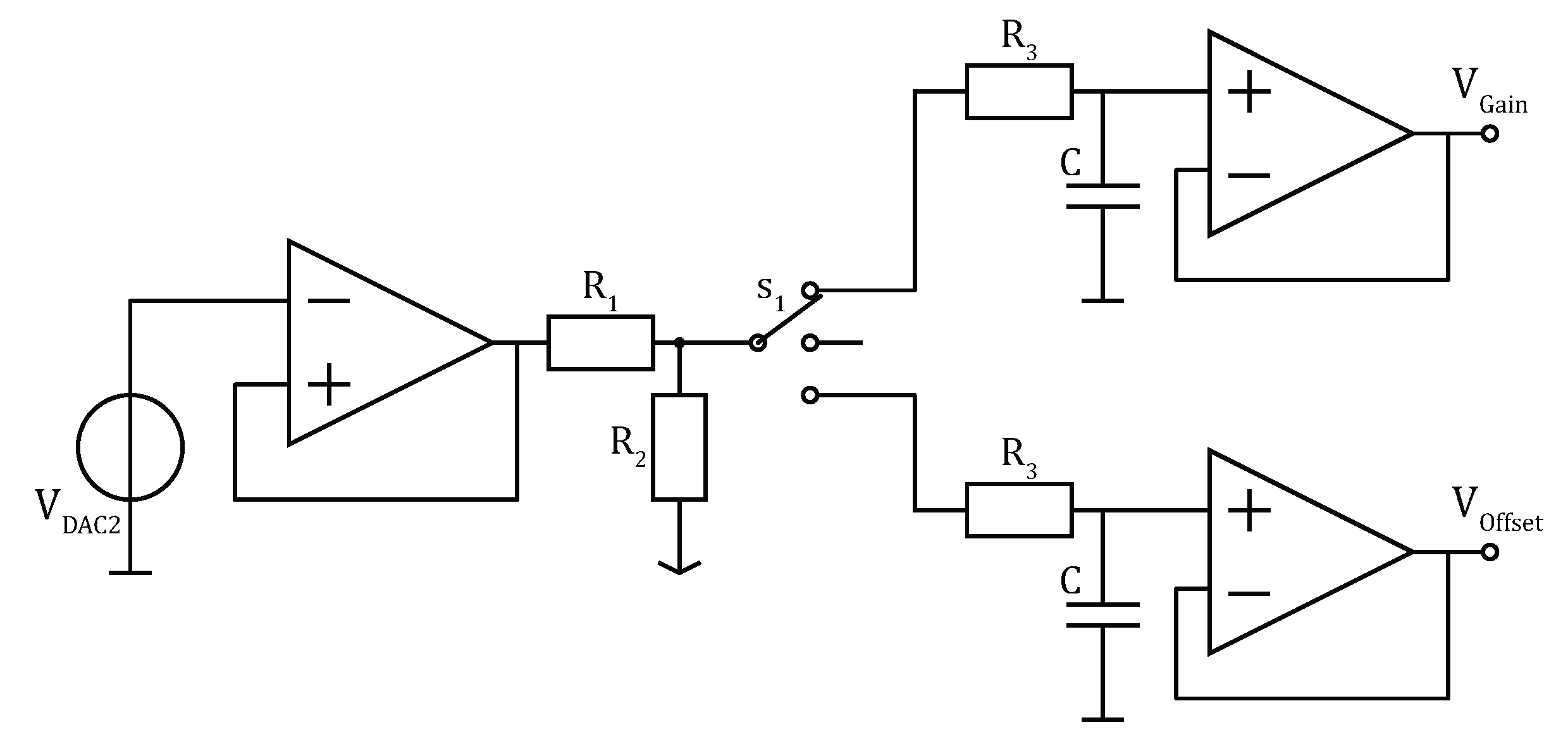
and
are generated by a single digital analog converter output using a sample and hold circuit shown in
Figure 9. The first amplifier implements a voltage buffer that decreases the current of the digital analog converter. The following voltage divider shifts the digital analog converter output range to symmetrical ±1 V range by referencing the lower pin of
to a negative voltage. Thereby, the offset voltage of
can correspond to either a constant charging or a constant discharging current. The actual sampling is implemented by a digitally controlled analog switch
while the capacitors hold the sampled voltages. The circuit is controlled by the microcontroller that uses a timer with three output compare channels that cyclically generate interruptions at three different time points. During the first interruption, the switch is set to middle position that is not connected. The second interruption changes the output of the digital analog converter output voltage to the value of the next clamp. Finally, the switch is switched to this clamp charging the corresponding capacitor. The final voltage buffers output the voltage that is stored in the capacity. As the input current of an operational amplifier is rather small, the voltage of the capacity is almost constant, even when the digital analog converter signal is removed when switching to the other path.
3.2. Current Controller
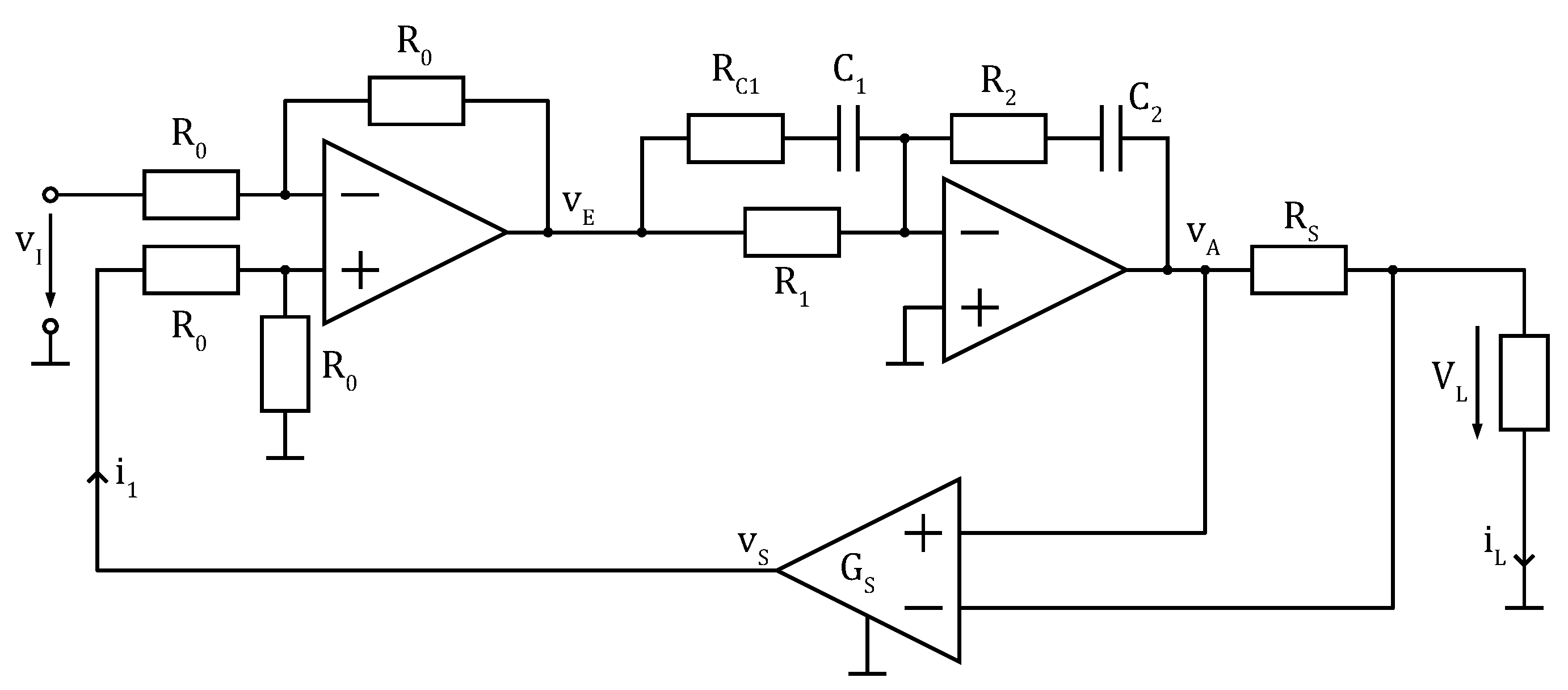
Regarding the control of the current, the first question that arises here is whether digital or analog control is better. Although it is much easier to adapt the controller parameters to the system being measured, the time constants are very small, so that the sampling intervals of a digital control would lead to instabilities. Therefore, an analog control system that is based on operational amplifier is used. The OPA549 is used as the output operational amplifier, which can directly drive the required currents. A possible implementation using an instrumental amplifier to measure the load current
and two operational amplifier that implement a differential amplifier and a PID controller is shown in
Figure 10. The main purpose of the instrumentation amplifier is to measure and amplify the differential voltage of the shunt resistor
and to reference its output voltage
to ground potential. The value
sets the desired load current multiplied by
and
:
Therefore, the operational amplifier on the left-hand side implements the differential amplifier with a gain of 1 and determines the negative of the measured error
:
The actual controller is implemented by the op amp on the right-hand side. As an approximation, the inputs of an operational amplifier can be regarded as current-less, so that the current flowing through
and
can be assumed to equal
. Therefore,
and
form two components of the regulating variable:
Due to the negative feedback, both input terminals of the operational amplifier are forced to ground potential. Therefore, the current
can be calculated by
Furthermore,
is defined by
The output voltage
is determined by the current
Inserting Equations (
9) to (
11) results in
Comparing the last equation with the equation of a PID controller
results in the following parameters:
In the next step the controller parameters were optimized. As the load represents the battery under test, which cannot be described sufficiently accurately by a resistor, an equivalent circuit consisting of a voltage source, a series resistor and a RC parallel circuit was used as . The circuit simulator Microcap already includes an optimizer. During the optimization the controller parameters were tuned to minimize the expression RMS(v(VE)) when a step function is applied to the input. Thus, the root mean square of the voltage , which in turn represents the control deviation should be as small as possible. The optimized circuit was then produced on a printed circuit board. Care must be taken to ensure that the connections that drive the high current to the battery under test are sufficiently sized.
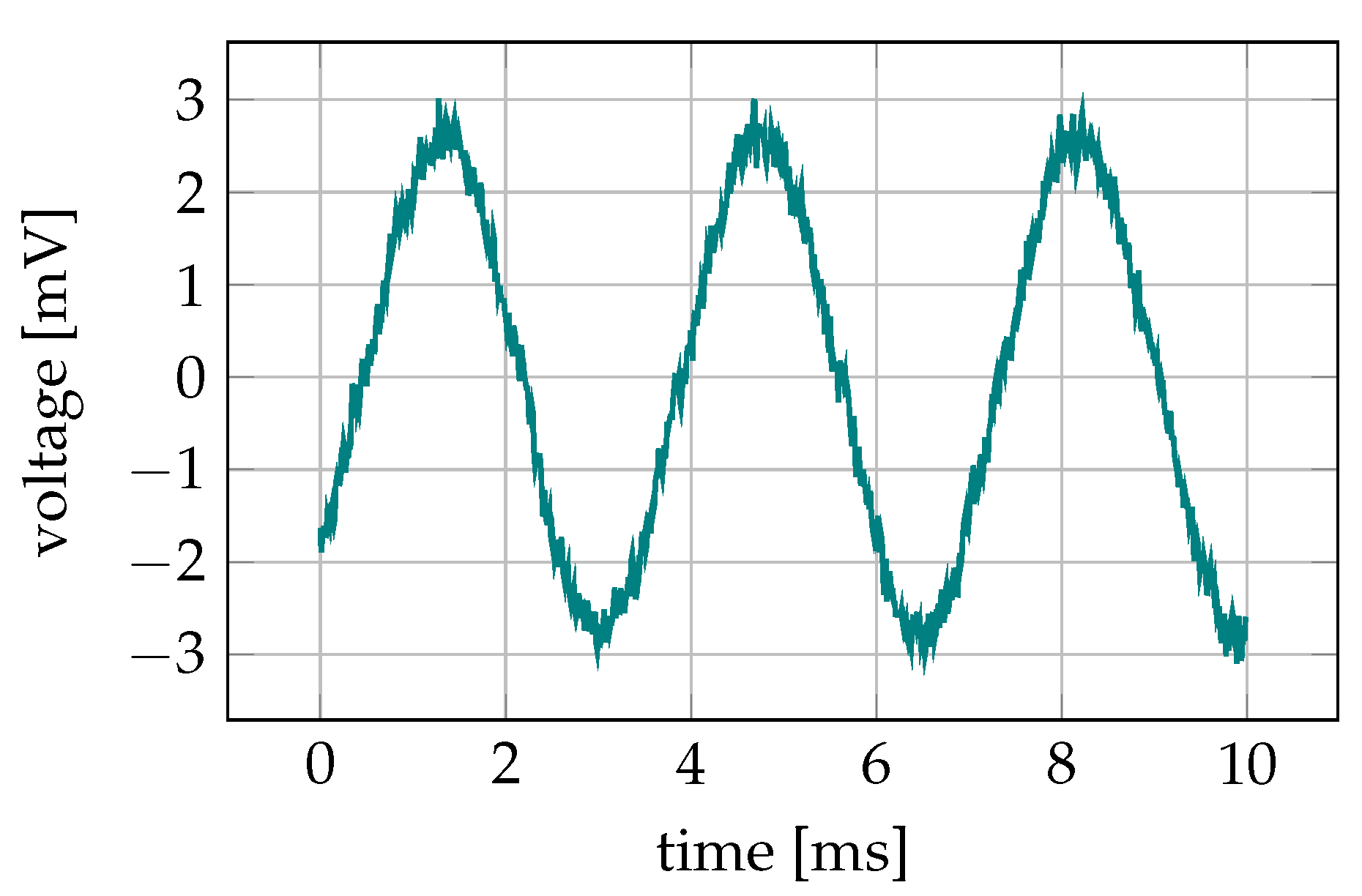
First, the step response of the current controller was measured using a test impedance, whereby the target signal was generated with the aid of a function generator. The voltage
is used to measure the current and shown in
Figure 11. The step response of the current controller asymptotically follows the input signal without overshoot and thus demonstrates the behavior of a first order low pass filter. The test signal transitions to 500
, so that the time constant can be read when 315
is reached. This occurs after 43 μ
and thus corresponds to a cutoff frequency of 23
. The current regulator is thus sufficiently fast for frequencies usually measured during EIS.
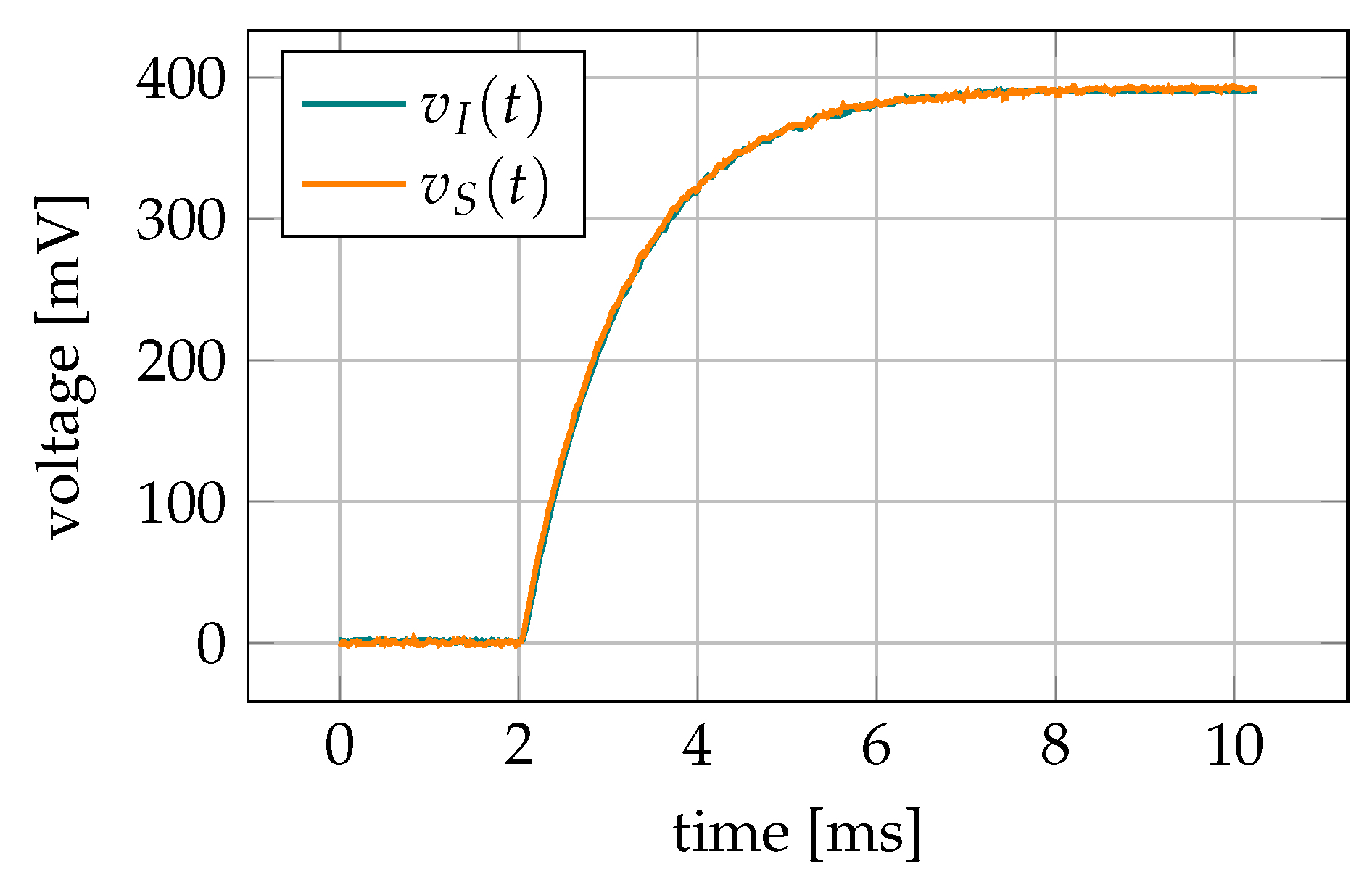
Figure 12 and
Figure 13 show the results when combining the signal generation unit and the current controller. Once again, the test impedance was used as
, which was designed on the basis of Kiel’s dissertation [
33]. First of all, it is noticeable that there is no visible difference between these two signals. However, the signals correspond rather to a first order delay element than a step function. This is due to the fact that the input signal is generated by the signal generation. The charging of the capacitor in the sample and hold part is mainly responsible for the slow voltage rise. Therefore, the current controller is dimensioned sufficiently fast to output the generated signals.
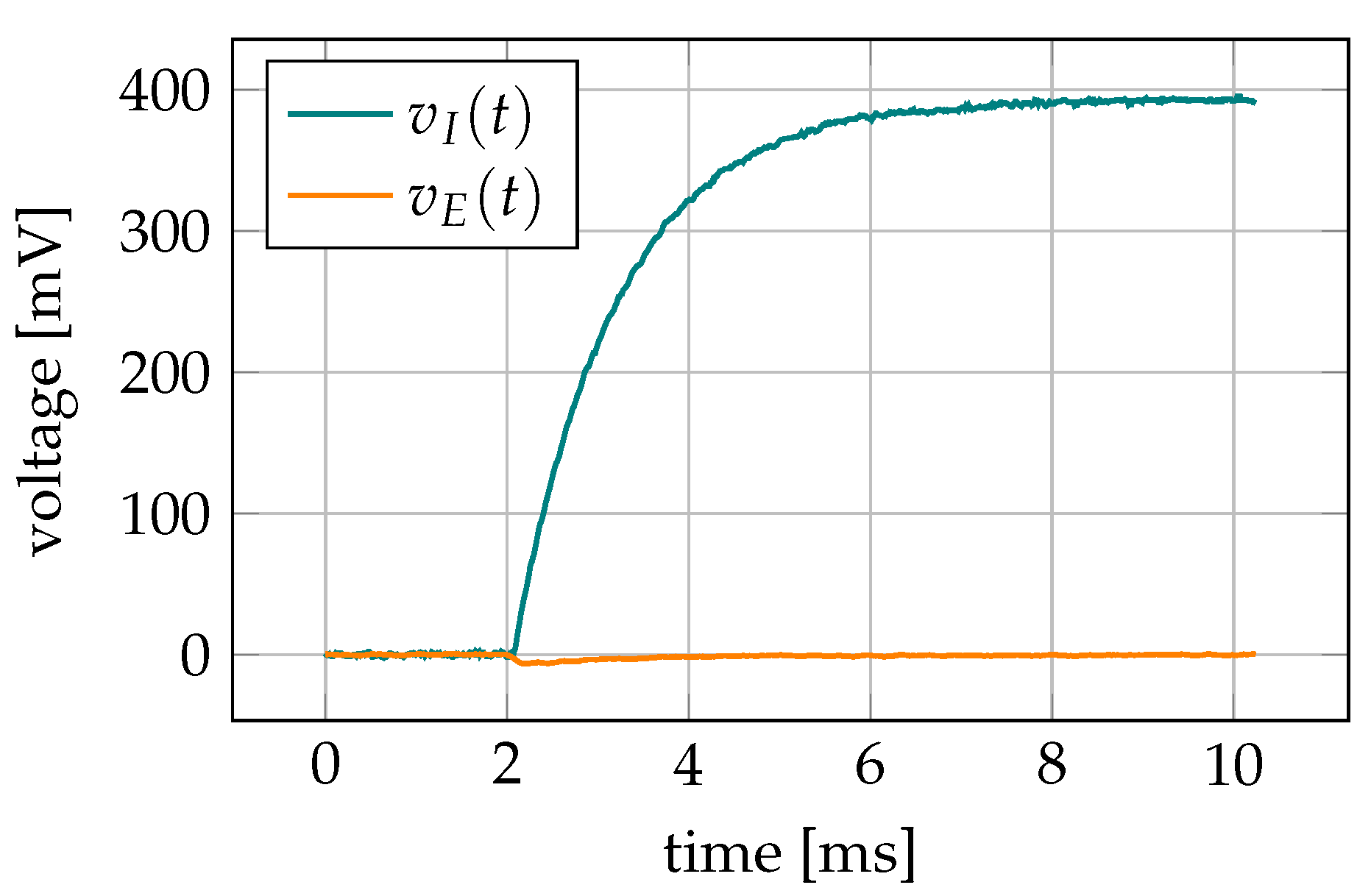
Figure 13 takes a closer look at the control deviation
. At the beginning of the step, when the slope is at its maximum, there is a small control deviation. In relation to the step height of 400
, the maximum deviation of
is still relatively small.
3.3. Drift Compensation
Due to the three-electrode technology, the measurement of the impedance spectra can only be performed during a charging process and during a discharging process, respectively, so that the state of charge of the cell changes to a certain extent during the measurement. As the measurement time at low frequencies is up to 30
, the DC component of the voltage measurement may change during the measurement. The voltage change is particularly large at the beginning of charging or discharging processes as the slowest processes have yet to decay. The voltage signal of such a case is shown in
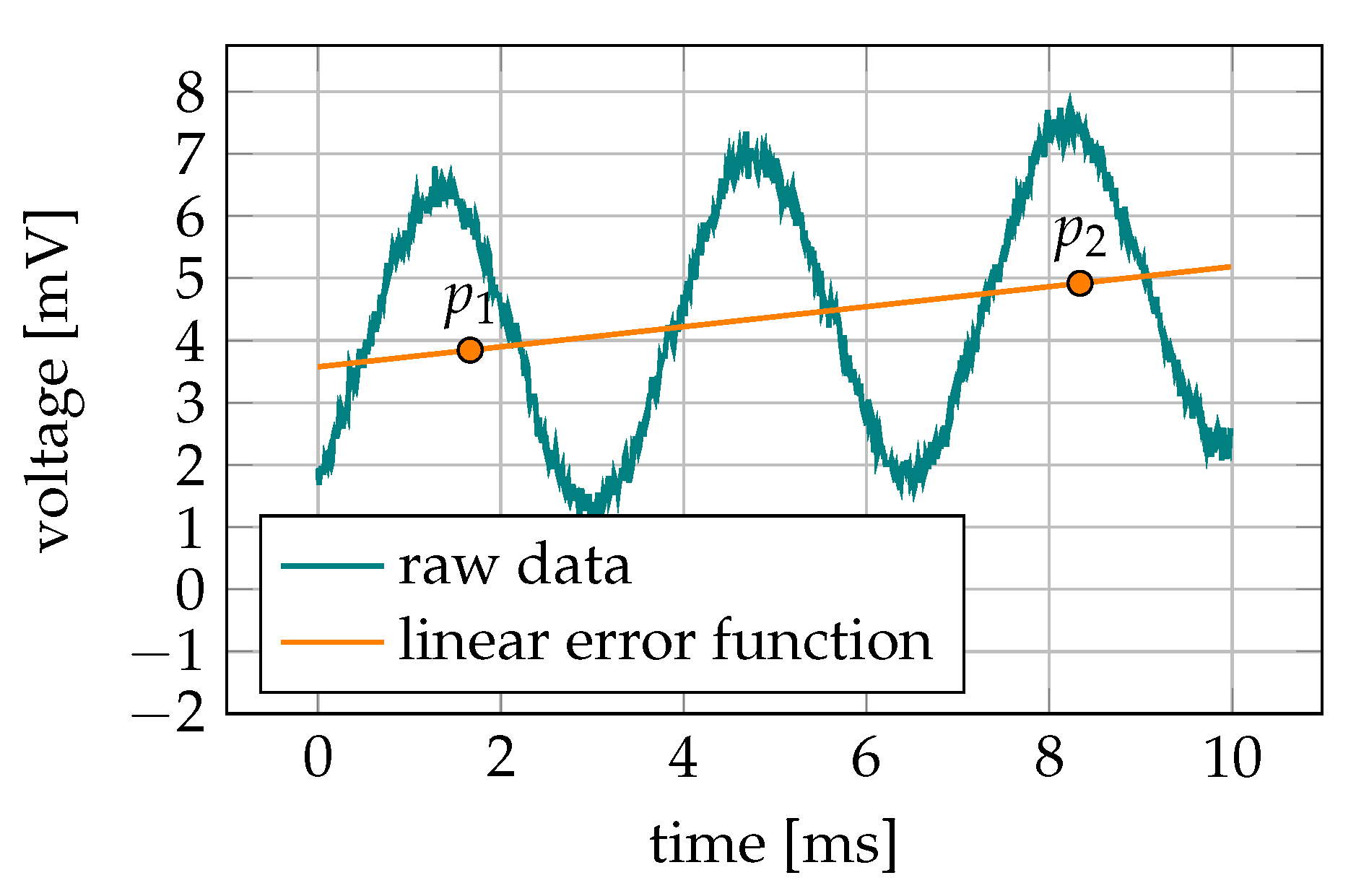
Figure 14 as an example.
The resulting error is minimized by modeling the DC voltage component in a linear way and subtracting it from the characteristic of the voltage. Linear functions are determined by two points. Thus, the mean values of the first sine period (
) and the last sine period (
) of the voltage signal are being determined. The mean value of a sine period without offset is zero. Therefore, for the evaluated periods, the mean value can be used to determine the offset value
. The associated time component
of the points corresponds to the midpoint of each period. Thus, the point (
) of the first period is given by its components
Here,
s implements a control variable that passes through the voltage samples
and their corresponding time points
. The number of values corresponding to the period is given by
and the measured frequency by
. The equation of a line described by
and
is then subtracted from the raw measurement data. As can be seen in
Figure 15, the error is almost completely eliminated.
3.4. Measurement Data
Afterwards, the corrected voltage signal and the measured current signal are Fourier transformed to
and
. As only one frequency is applied at a time, only this frequency has to be evaluated. To save computational effort, the Goertzel algorithm can therefore be used [
34]. Finally, the impedance
of frequency
k is calculated by
Several impedances for different frequencies are measured quickly one after the other and can be combined to a spectrum.
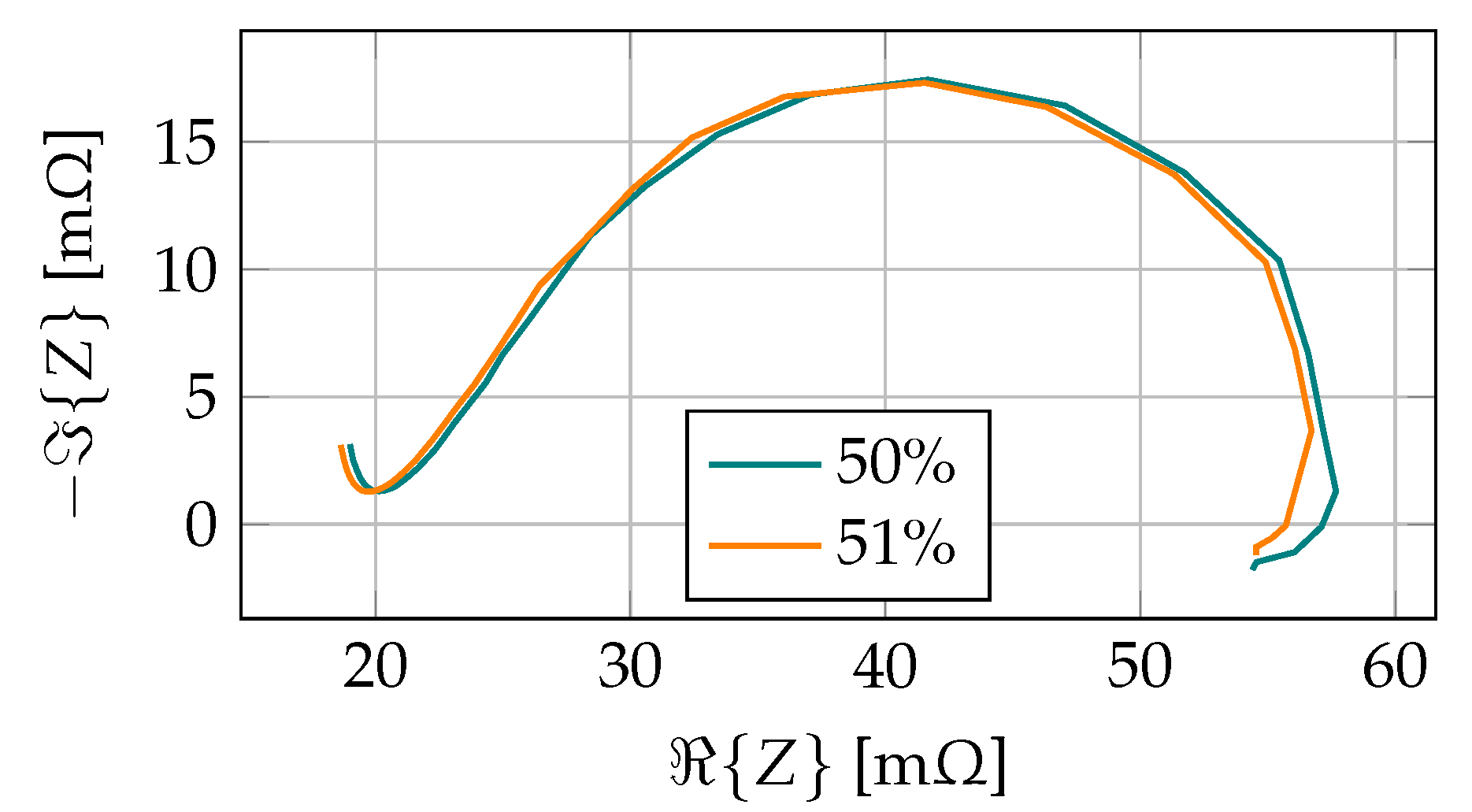
Figure 16 shows some example measured spectra data. Between the measurements, the cell was discharged for 45 min, therefore the spectra are not exactly identical. It can already be seen here that especially the low-frequency components, which are found on the right-hand side, are influenced by the state of charge.
3.5. Adapter Board
Another possibility for measuring impedance spectra is the use of a commercial impedance spectroscope. The most difficult challenge in the search for a suitable product is the simultaneous application of a DC current during the impedance measurement. This is essential for the developed zinc–air cell, as it uses a three-electrode technology and the respective charge or discharge region must not be left during the impedance measurement. If no DC current is applied, the cell would be charged during the first half-period of the sine wave and discharged during the second half-period. The EISmeter from the Digatron company was finally chosen.
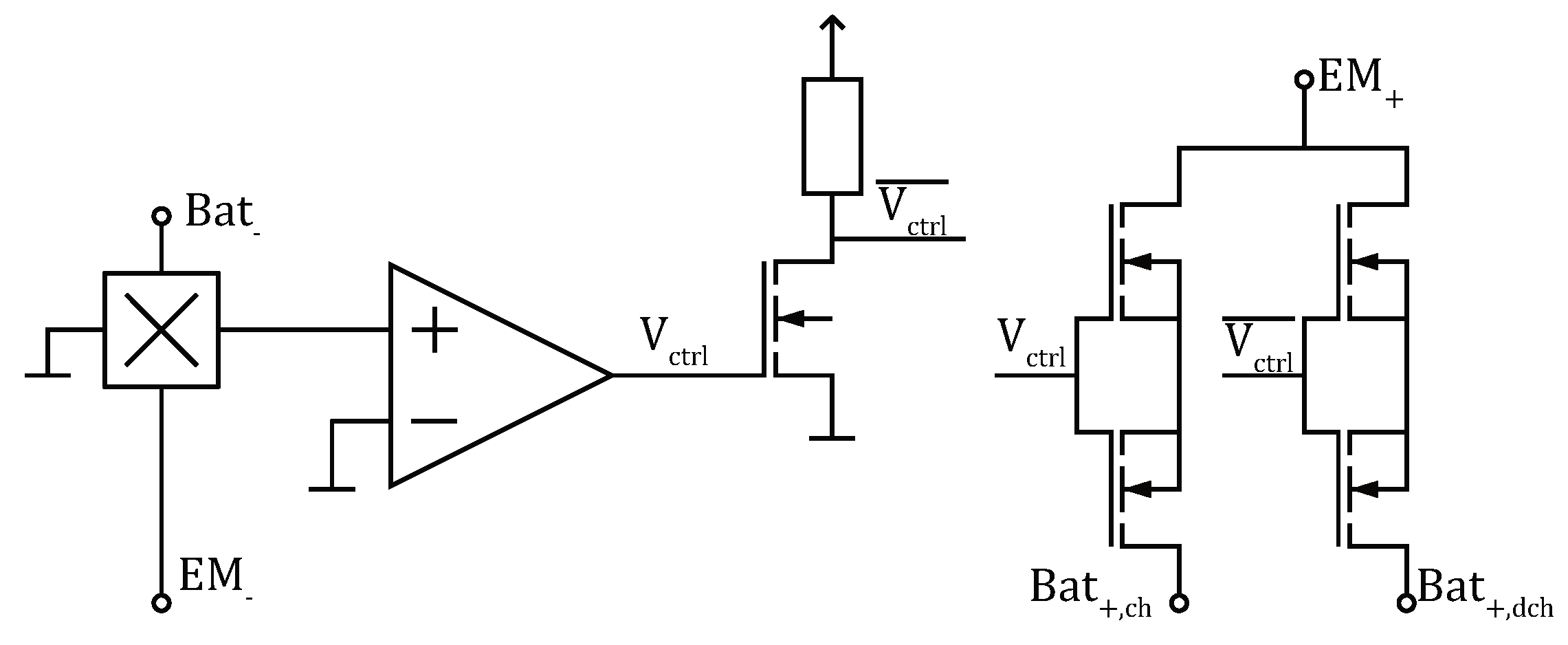
Although the EISmeter can apply a DC current during the measurement, it is only designed for two-pole cells. Besides the manual reconnection, one way to still use zinc–air cells with three-electrode technology is to use two channels of the EISmeter for one cell. One channel is taken exclusively during charging of the cell and is connected to the charging electrode and one channel is connected to the air cathode is used only during discharging of the cell. Of course, the method has the disadvantage that it reduces the number of simultaneous tests by half. To overcome this, an electrode changer board was developed. The corresponding circuit is shown in
Figure 17. It is based on a Hall-effect current sensor from Allegro Microsystems. An operational amplifier, which works as a comparator, detects the direction of the current, i.e. whether the cell is being discharged or charged. Depending on the case, a different current path is enabled to the appropriate electrode. An identical control is also available for the path of the voltage measurement, whereby smaller transistors are used here.
4. Data Generation
To generate measurement data, a procedure shown in
Figure 18 and
Figure 19 is used. Here, zinc–air cells are continuously charged or discharged with an alternating current of 1
, 2
, or 3
. This means that the charging process starts with 1
. A short delay is made until the cell voltage has become familiar with the current and a measurement of the impedance spectrum is started. After that, the charging current is increased to 2
; again a short delay is made and the next impedance measurement is started. The same is performed for 3
and then it starts again at 1
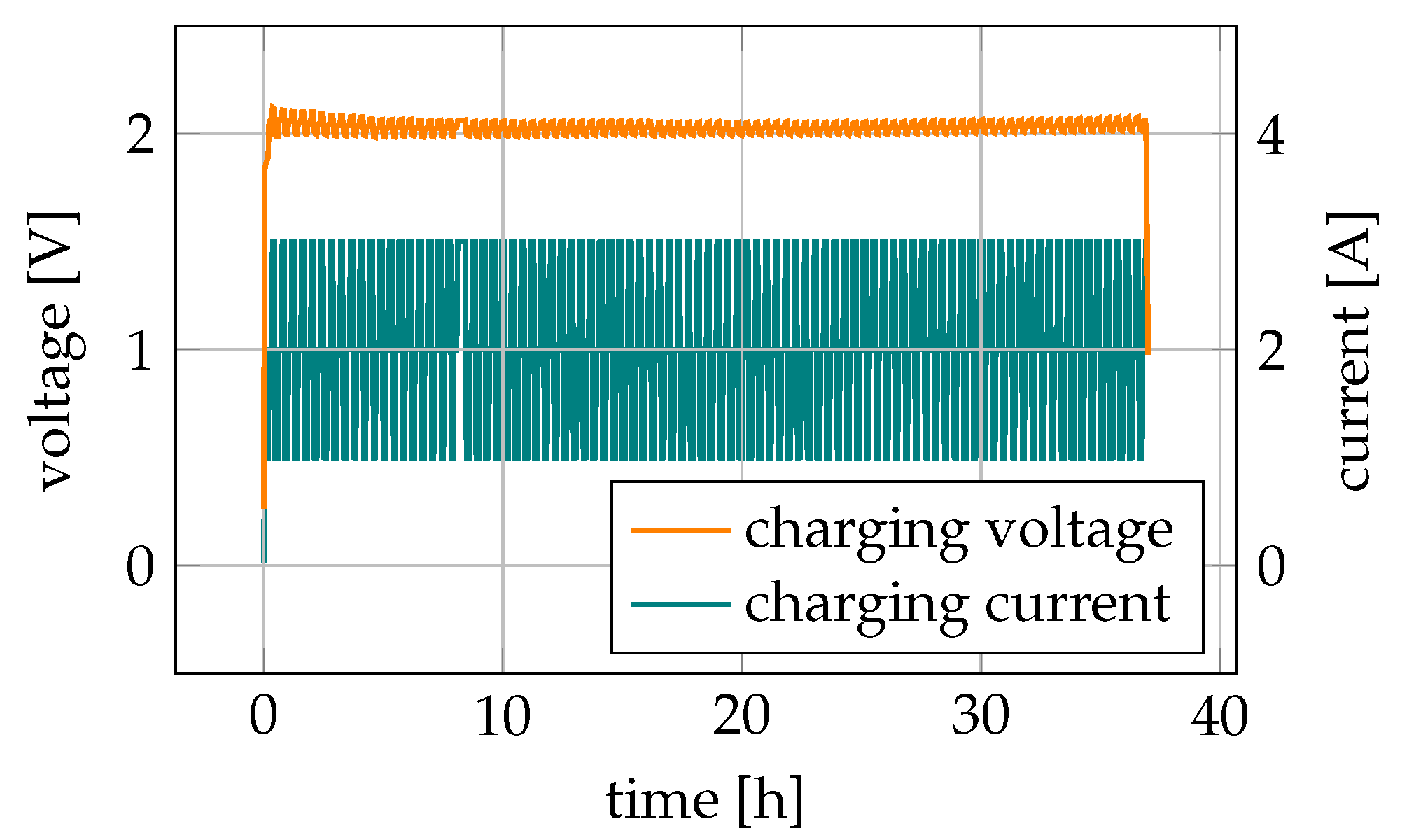
. As expected, this also results in a change in the battery voltage.
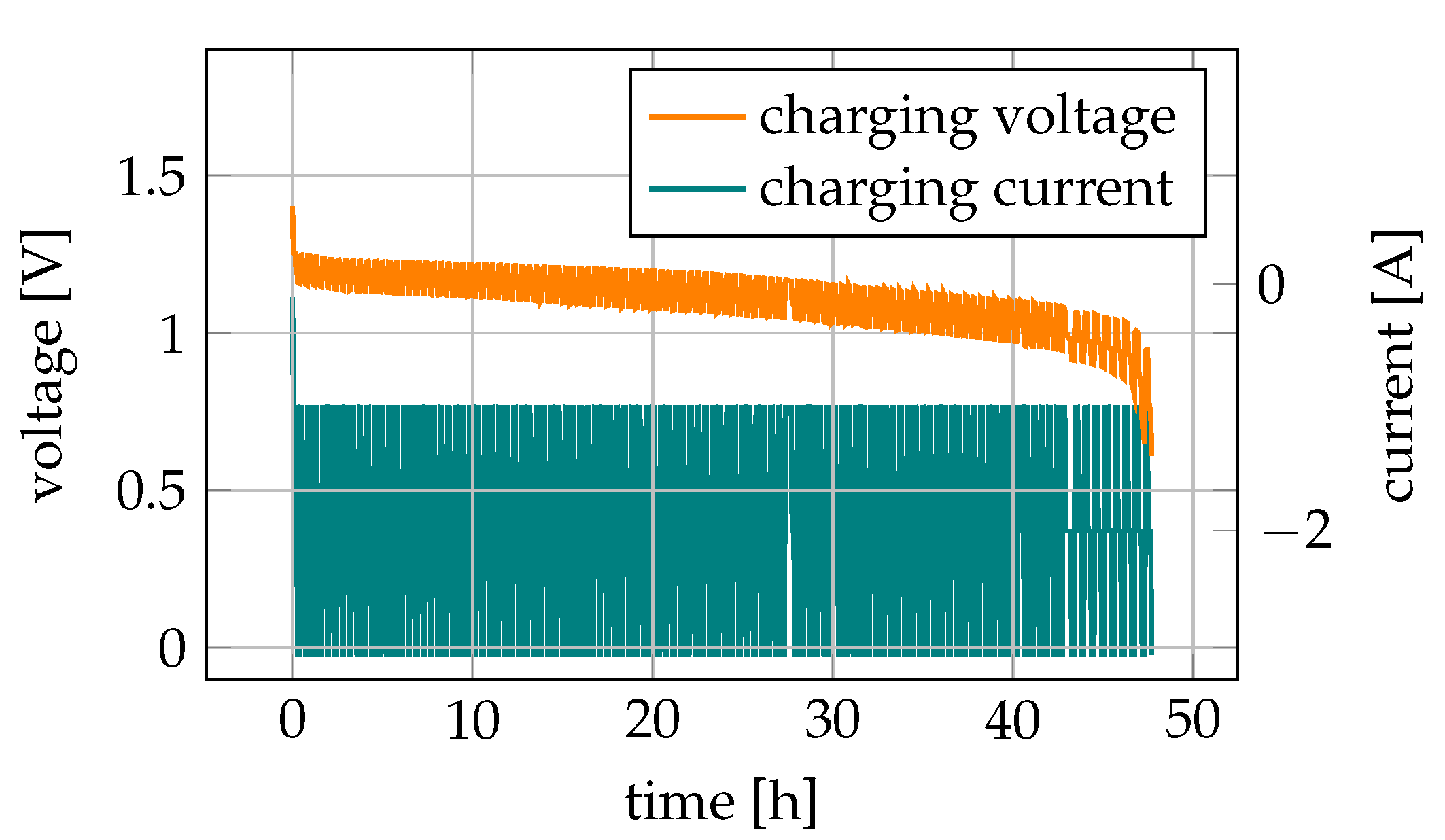
Meanwhile, the applied charge is counted so that, in this scenario without any breaks, the actual state of charge is known and can be used as target values for supervised learning. Once the cell is full, the discharge process starts using the identical technique. Therefore, discharging processes have been recorded where the discharge current was regularly alternated between 1
, 2
, and 3
. The resulting voltage curve and the corresponding discharge current for one discharge cycle are shown in
Figure 19.
After several charge and discharge cycles, there is no random division of the resulting data into training data and test data, but the measurements at 1
and 3
form the training data set and the measurements at 2
form the test data set. This ensures that the results correspond to an actual generalization of the working point. The hyperparameters are optimized by cross-validating the training set only to prevent data leakage. Of course, the feature vector must be extended to include the DC current value, so that the following feature vector is now obtained:
7. Conclusions
In this publication, it has first been shown why a massive expansion of battery technology can be expected in the future. One important point here is certainly the electrification of vehicles. However, electric cars are particularly climate-friendly only if the electricity they use is also generated ecologically. To counteract global warming, the share of renewable energies must therefore be massively expanded in the future. However, electricity from PV systems and wind turbines, which account for a large proportion of renewable energies, is only available intermittently or irregularly. At the moment, the stabilization of the transmission grid can still be maintained with power plants and their rotating masses. If the expansion of renewable energies leads to the shutdown of the majority of power plants, system stabilization must be made possible in an alternative way. Therefore, a massive expansion of battery technology is to be expected in this point as well.
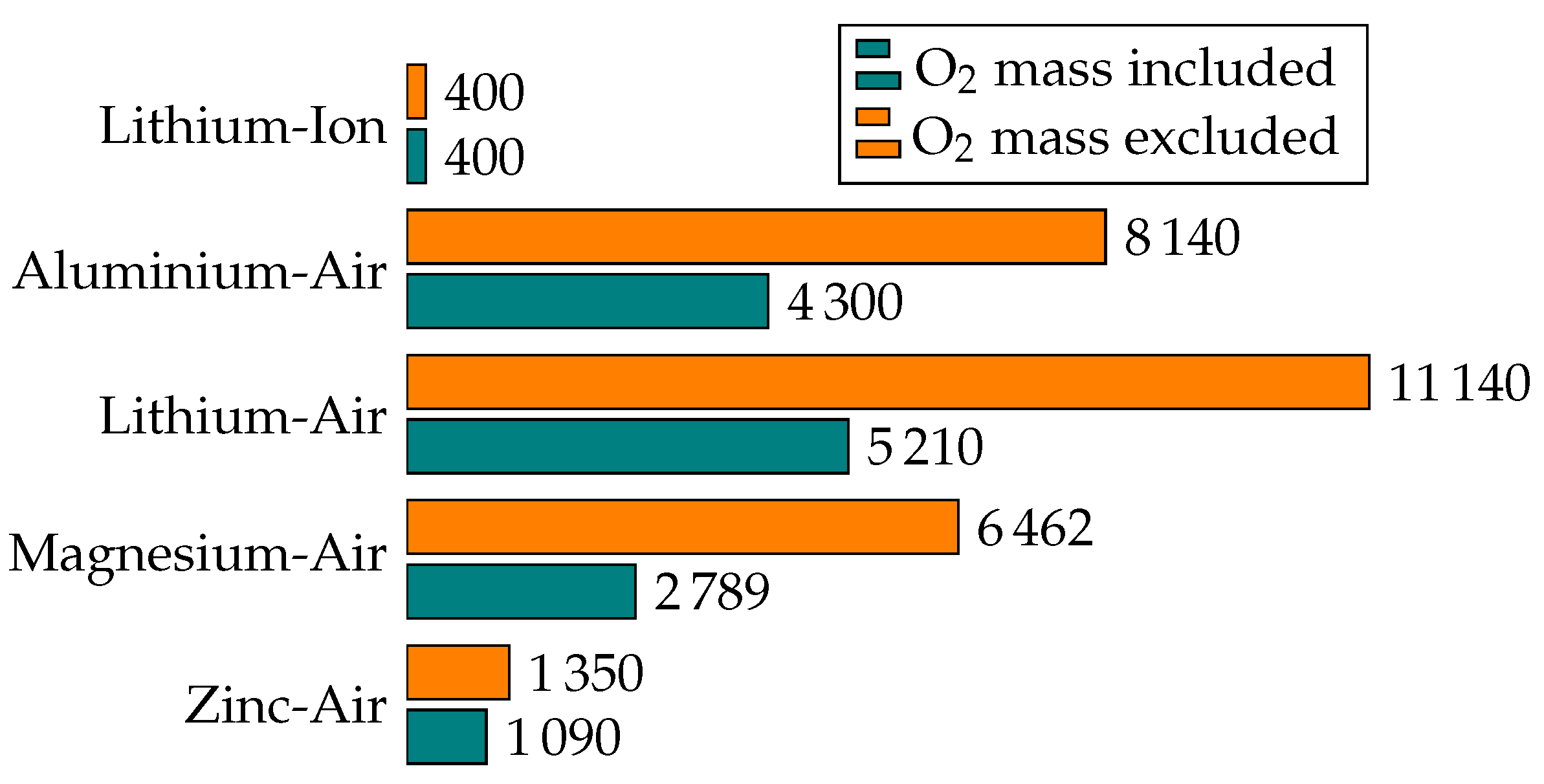
This massive expansion of battery technology cannot be based on existing battery technologies alone for several reasons. First, the raw materials of existing technologies are limited and are mainly found in countries that do not allow safe working conditions. Zinc, on the other hand, is more often found in countries that do not exploit their employees, such as Australia and North America. Another point concerning raw materials is the recyclability cycle. The simple construction of zinc–air batteries helps here. They can be opened without danger and the components can be separated without great effort. Secondly, the theoretical energy density of metal–air batteries is much greater than existing battery technologies. For example, the theoretical energy density of zinc–air cells is three times greater than that of lithium-ion cells.
However, the operation of zinc–air cells is more complex, as existing BMS cannot be used. The reason for this is the small voltage differences that occur during charging and discharging. State of the art battery technologies typically use the cell voltage to detect the state of charge. When a zinc–air cell is charged, the cell voltage increases by only 40 mV during the charging process, i.e., by an order of magnitude less than in other battery technologies where the cell voltage can be used to detect the state of charge. State of charge detection based on cell voltage is not possible, in particular as the influence of temperature and electrolyte concentration on cell voltage is greater than the state of charge itself. The charging process is further complicated by the fact that an accompanying electrolysis process starts at about the same voltage level as the battery charge voltage when the cell is overcharged. This means that overcharging cannot be detected from the cell voltage. Both overcharging and deep discharging damage the cell. However, when discharging, a large voltage drop occurs towards the end of the discharge process, which can be used to detect the end of discharge. Previously, it was therefore not possible to use zinc–air batteries without coulomb counting. The typical application scenarios are excluded by this obstacle, as the cell must be operated continuously in order not to lose the known SoC due to self-discharge. In order to take advantage of the benefits of zinc–air batteries, a method has therefore been developed that enables the detection of the state of charge.
A very promising method to generate measurement data that depend on the state of charge of the cell is EIS. Here, the impedance of the cell is measured for a whole set of different frequencies. However, the unique electrode arrangement of zinc–air secondary cells means that conventional EIS measurement systems are not suitable for use with zinc–air batteries. Therefore, the development of an adapter board was demonstrated that allows existing EIS measurement systems to be used with zinc–air batteries. As stand-alone EIS measurement systems are usually very large and cost-intensive, a small and low-cost measurement system was developed, which makes the integration of the measurement technology financially attractive even for smaller energy storage systems, such as those used in the private sector for intermediate storage of solar energy.
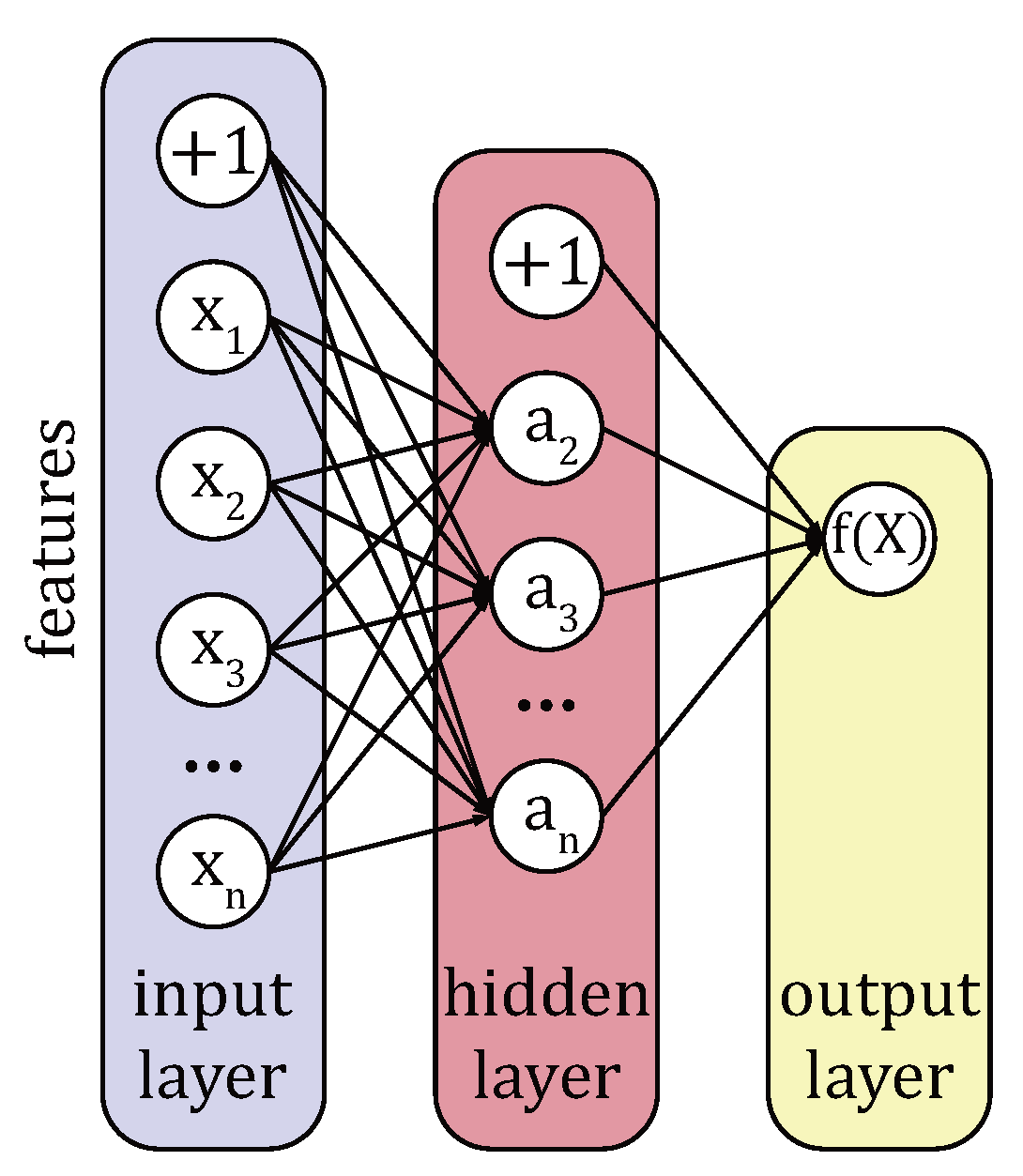
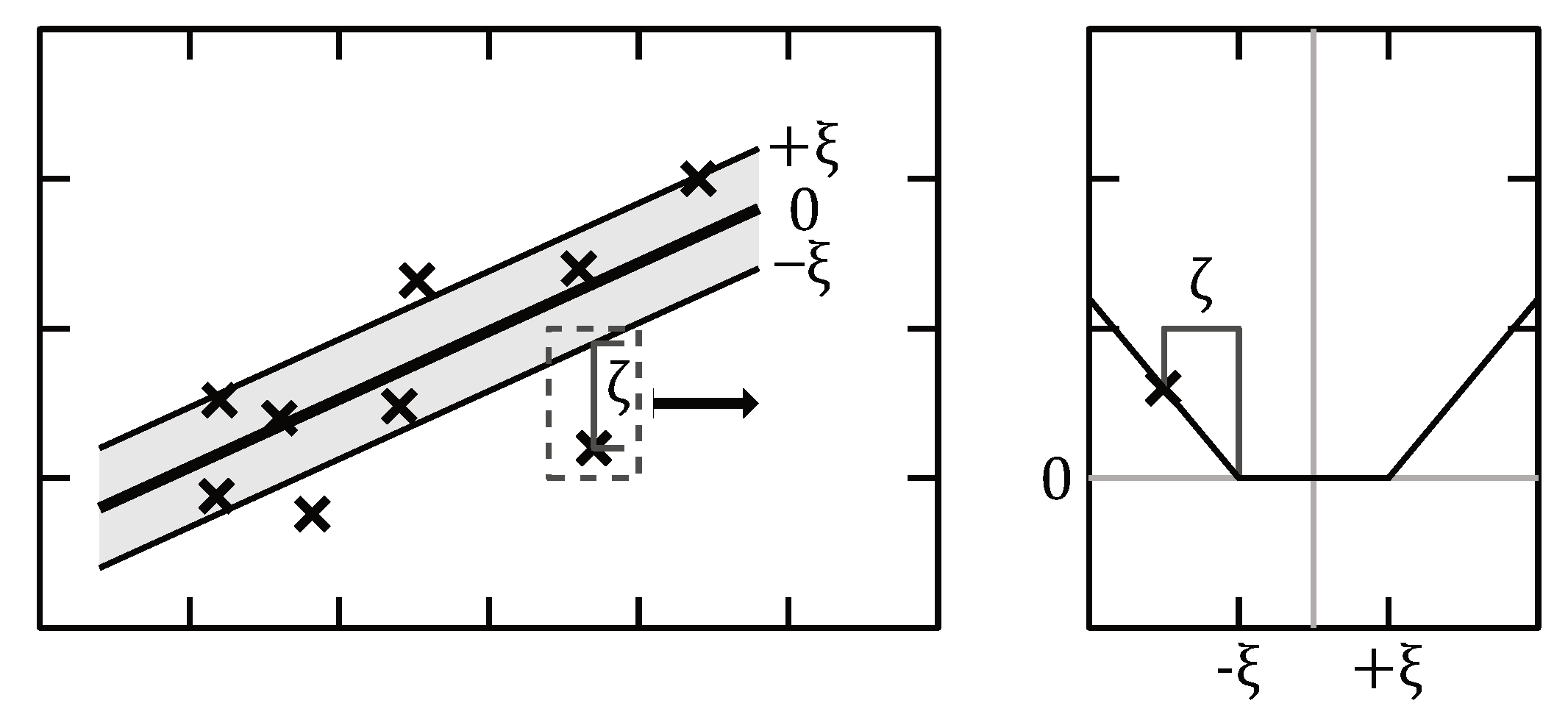
Typically, the measured impedance spectra are used to parameterize an electrical equivalent circuit of the battery. However, many of the components of the equivalent circuit depend not only on the frequency but also on the operating point or the DC current component during the impedance measurement. Therefore, an exact knowledge of the cell processes is necessary to work out the influence of the DC current on the parameters. Typically, previous approaches therefore assume a fixed operating state of the cell while the measurement data are being recorded. In the article, methods of machine learning, were also used to check the capability of determining the state of charge on the basis of the EIS spectra measured at different charging currents. Artificial neural networks and SVR turned out to be particularly promising. In contrast to the common process of parameter fitting, both methods use the raw measured data of the measured impedance spectra as input data, so an exact knowledge of the battery model is not necessary and they can be applied particularly easily. The hyperparameters of the two methods were optimized in the grid search procedure and via a Bayesian optimization on the basis of the training data set in order to prevent data leakage.
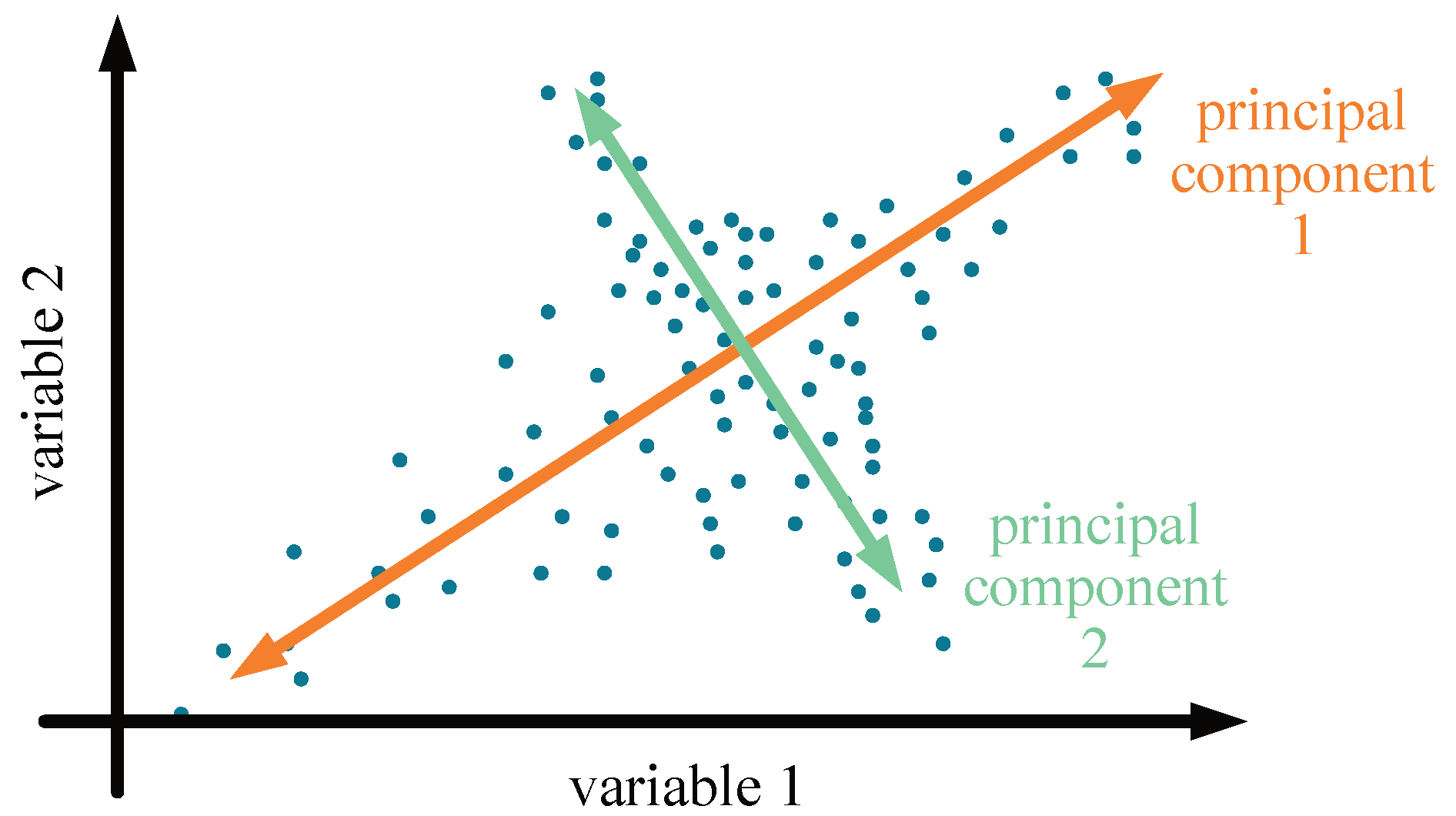
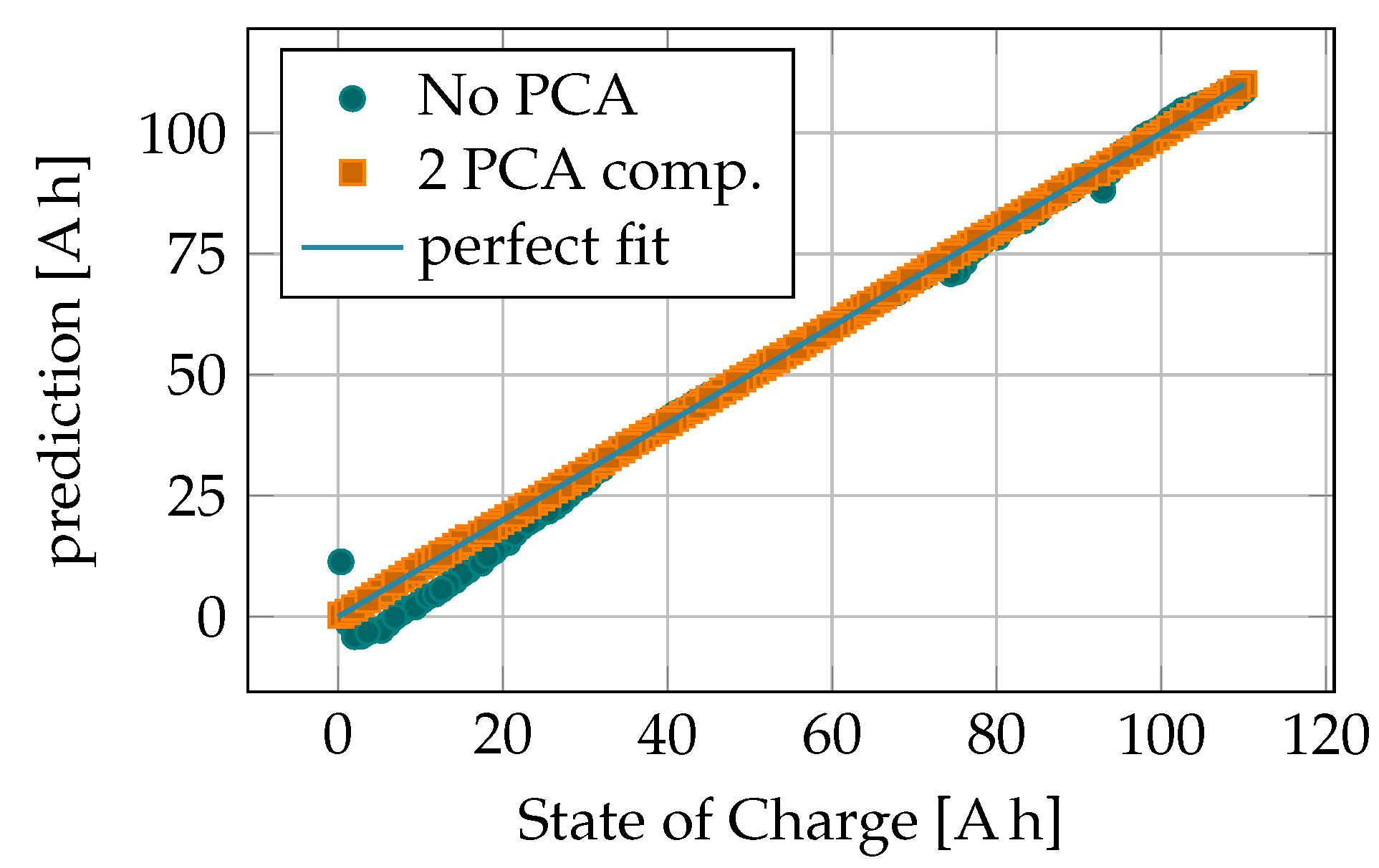
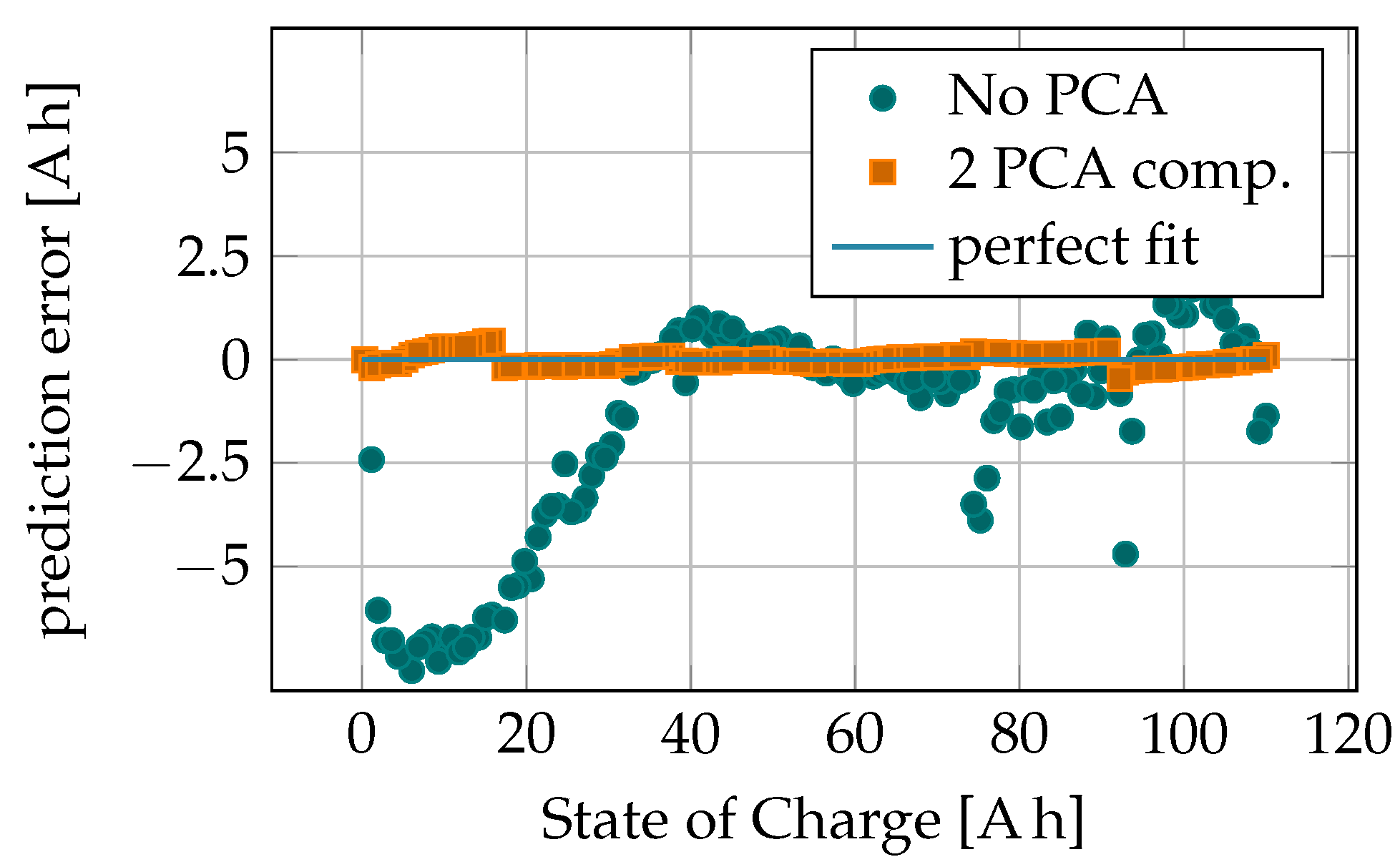
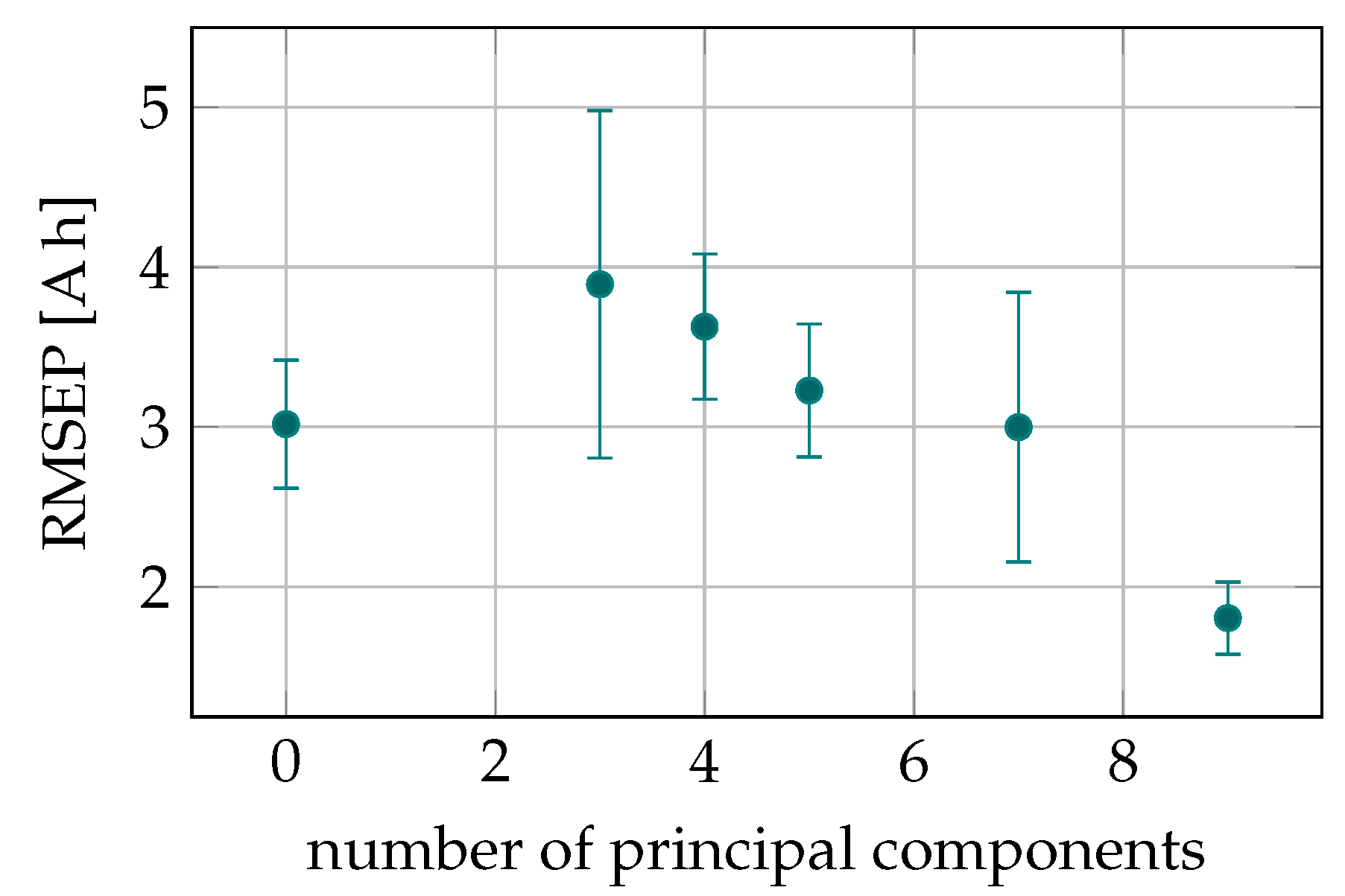
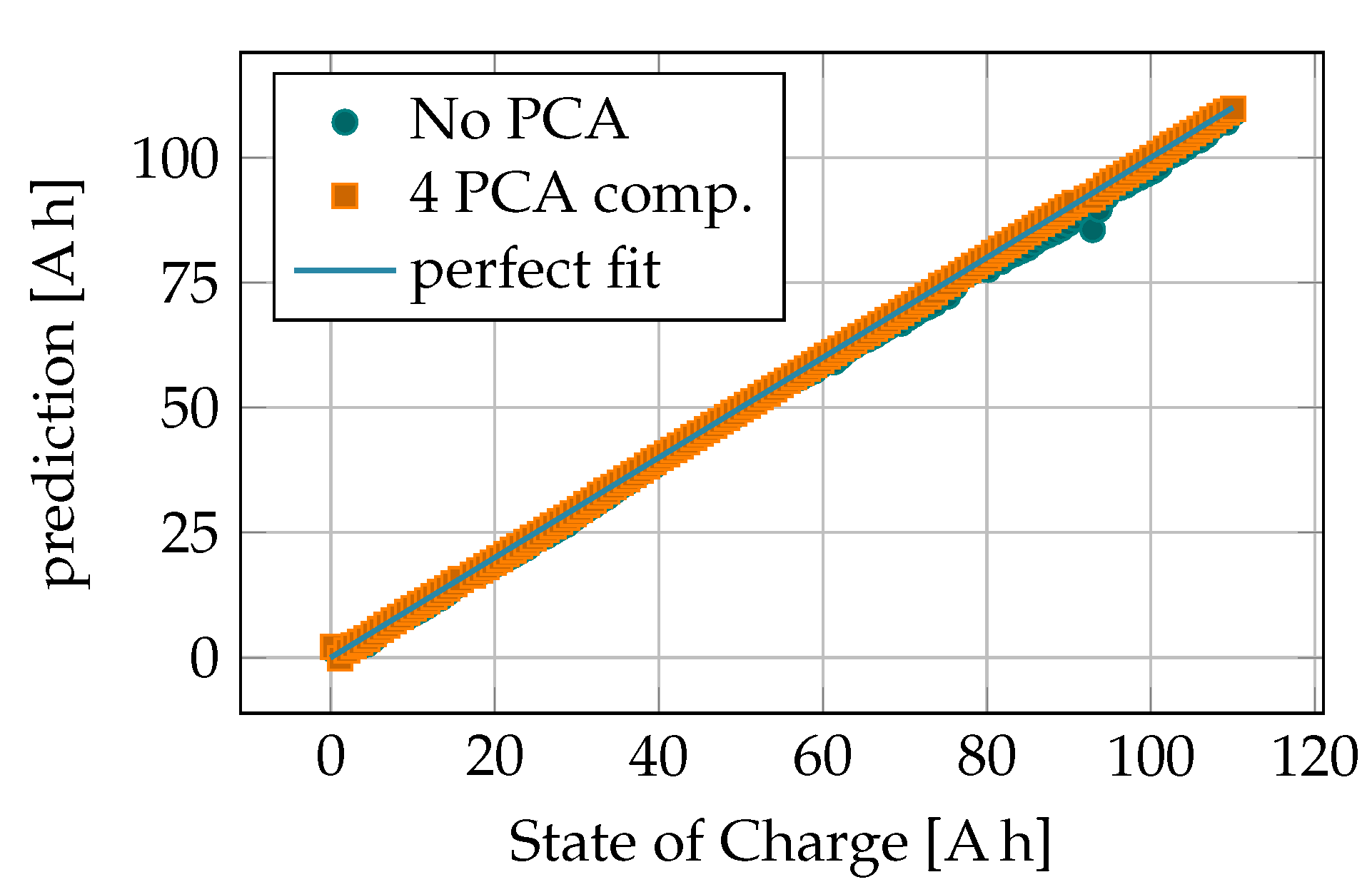
A crucial point and a highlight is that both artificial intelligence methods can also be applied to unknown DC currents during impedance measurement. A change in the charge or discharge current, for example, leads to a change in the linearized charge transfer resistance and thus to different impedance spectra. Provided that the training data contains the charging current selected from the outer limits of possible charging currents, the determination of the state of charge when interpolating the charging current within these limits is very precise. In principle, both methods are sufficiently accurate. By means of a principal component transformation, the dimensionality of the feature space was reduced with very little loss of information. Provided that a particularly strong reduction in the dimensionality is used, ANN show a better performance. Thus, the RMSEP is smaller when using one to four principal components inclusive than with SVR. The best result is obtained when using two principal components. With a higher dimensionality of the input data the SVR is ahead. Even when the principal component transformation is not used, SVR shows a smaller tendency to overfit, so that the metric is only about half as large. When considering the best results, the ANN achieves an error of 0.16% and the SVR achieves an error of 0.47% on unseen data.
In practice, this success is of great relevance. Now, no predefined charge current is needed, which was trained beforehand. Thus, the current working point of the battery does not have to be left in order to start the determination of the state of charge, as long as the dc current is within the trained limits.


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}