
Impedance Control of Space Robot On-Orbit Insertion and Extraction Based on Prescribed Performance Method


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Dynamic Modeling of Space Robot and Analysis of Manipulator End Impedance
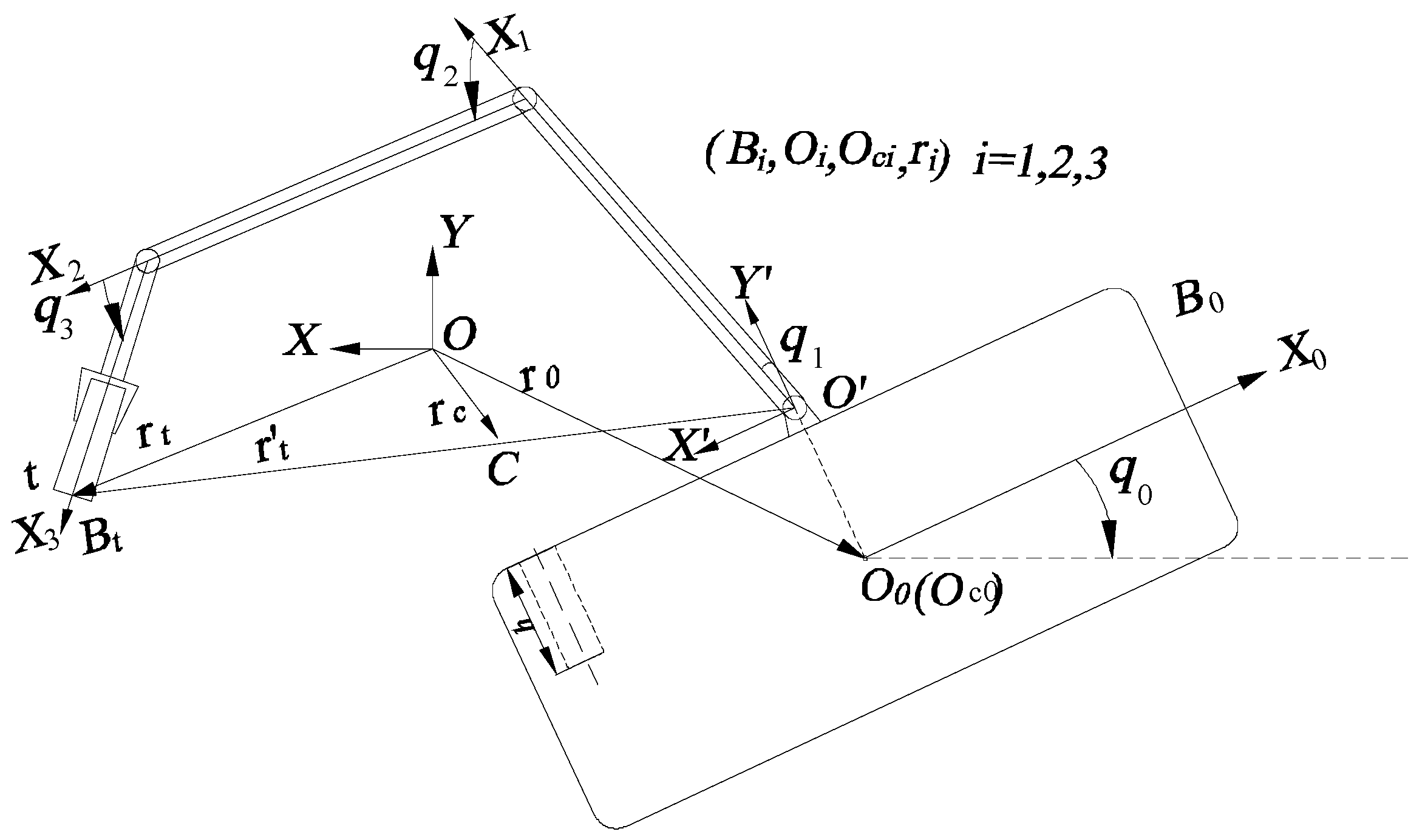
2.1. Three Links Free-Floating Rigid Space Robot Model
2.2. The Motion Jacobian Relation
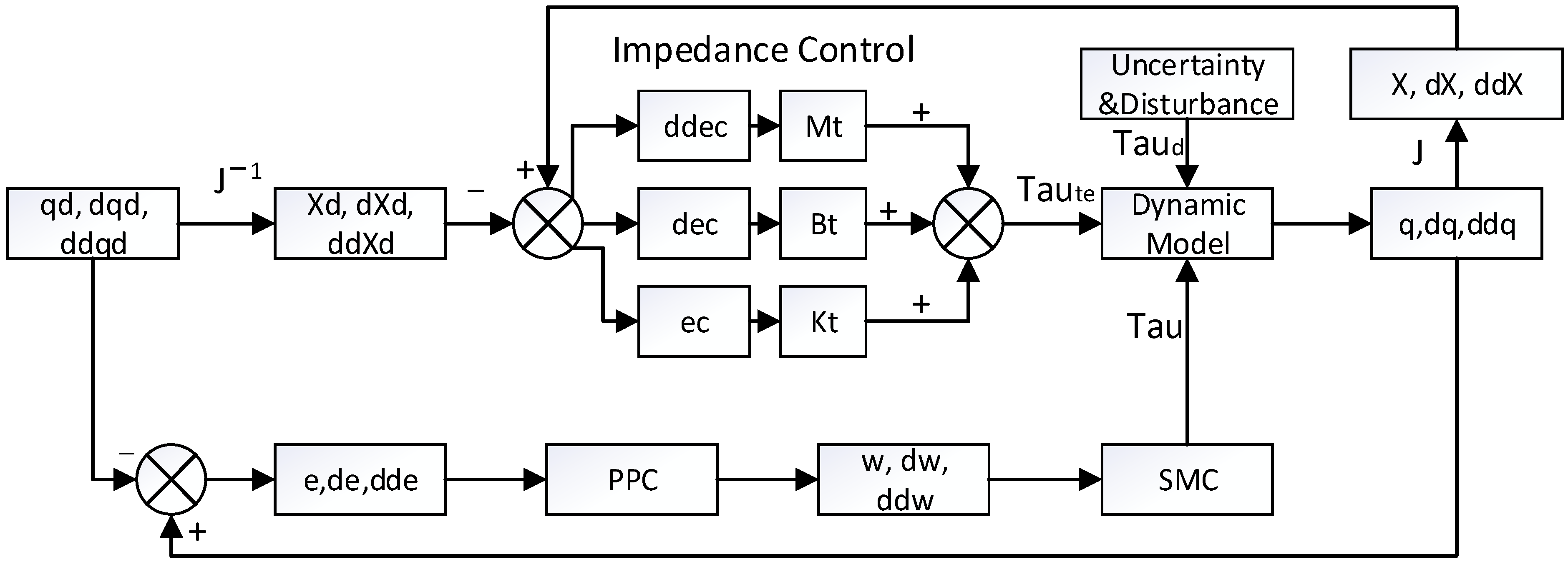
2.3. The Impedance Model of Manipulator End
3. The Model Reconstruction and the Estimator of Unknown System Dynamic
4. The Design of Controller
4.1. Prescribed Performance Constraints
- (1)
- It is time dependent and monotonically decreasing.
- (2)
- It is continuously differentiable.
4.2. Space Equivalent Mapping
4.3. Nonlinear Controller Design
5. Simulation Analysis
5.1. Details and Results of the First Simulation Condition
5.2. Details and Results of the Second Simulation Condition
5.3. Details and Results of the Third Simulation Condition
6. Conclusions
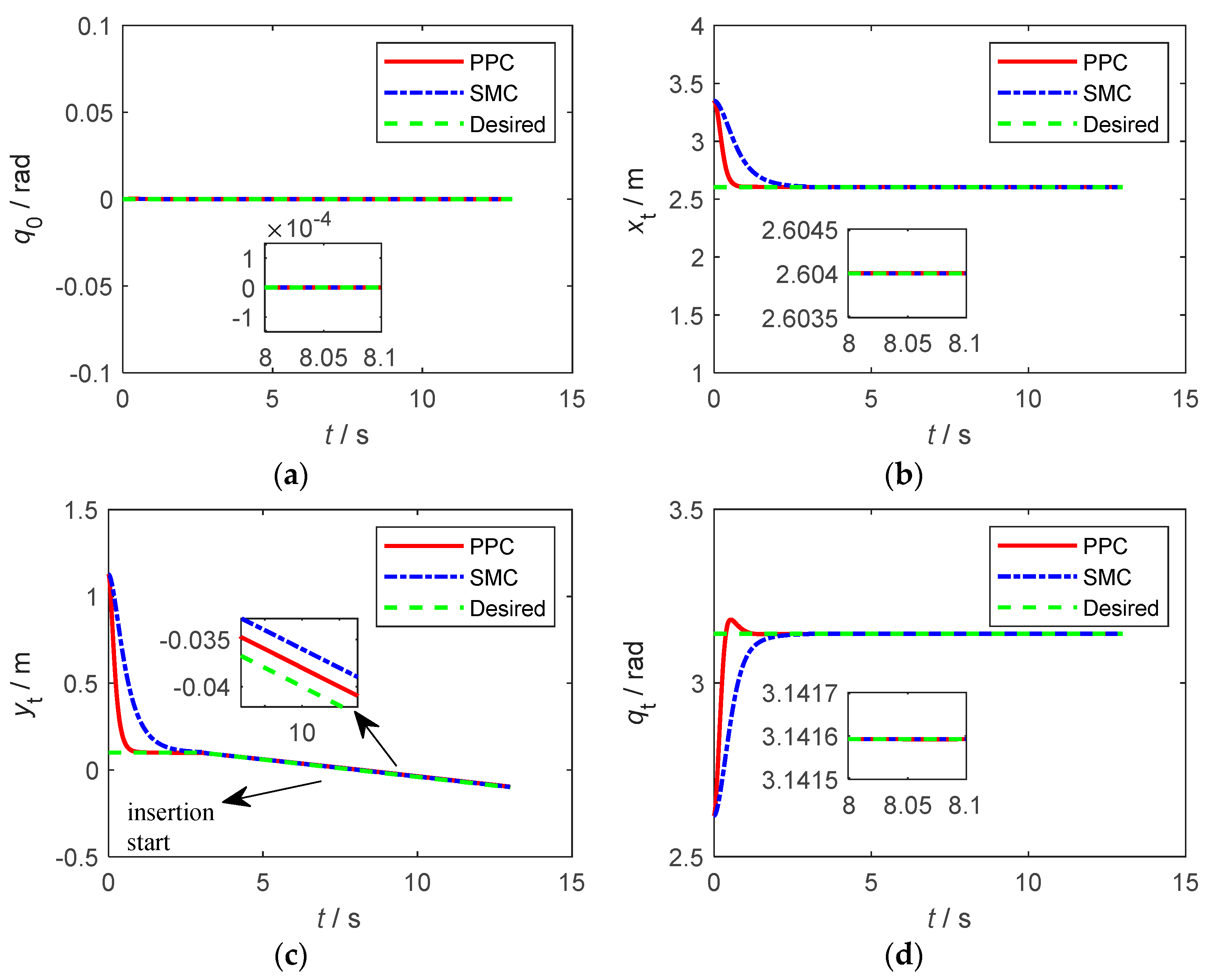
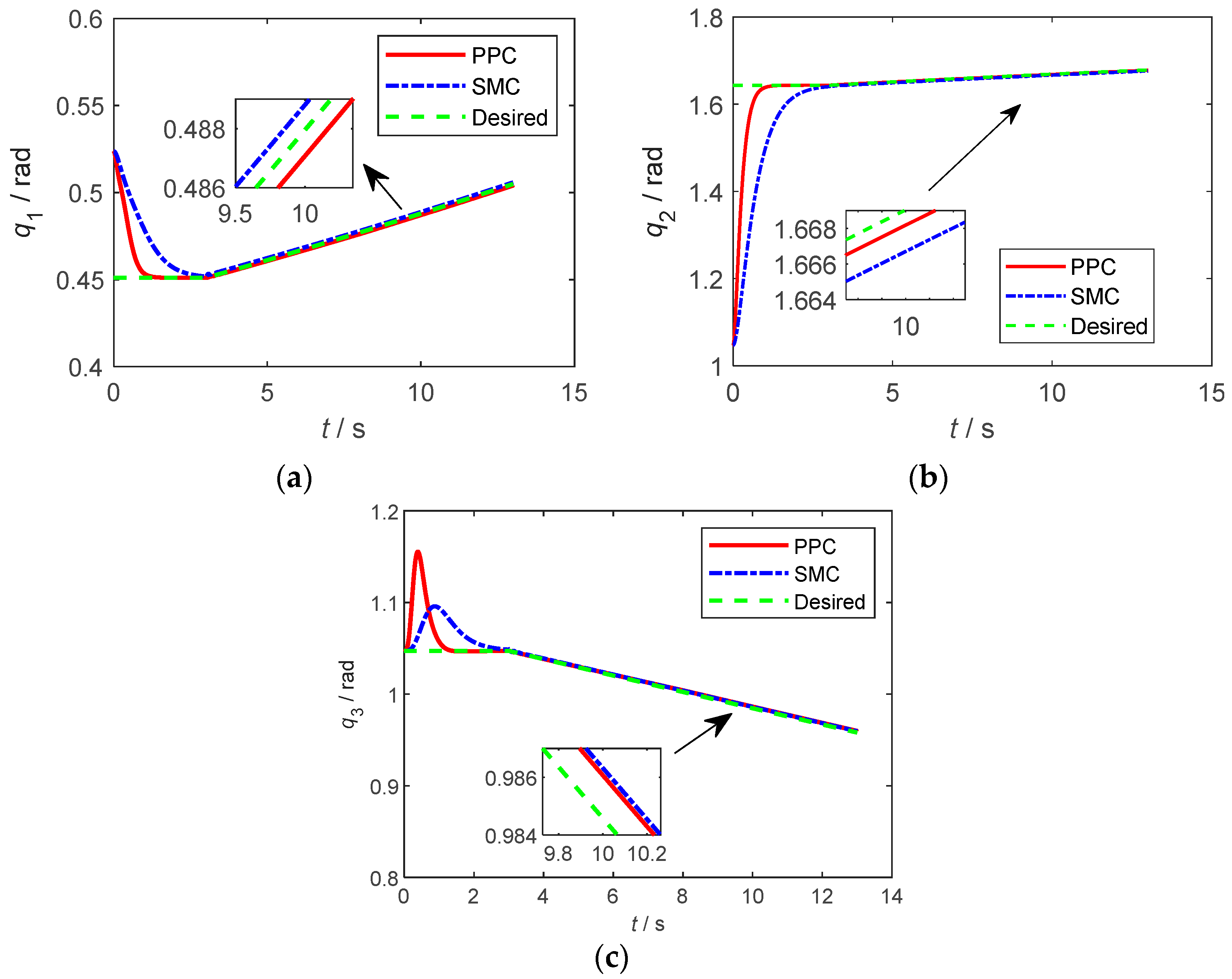
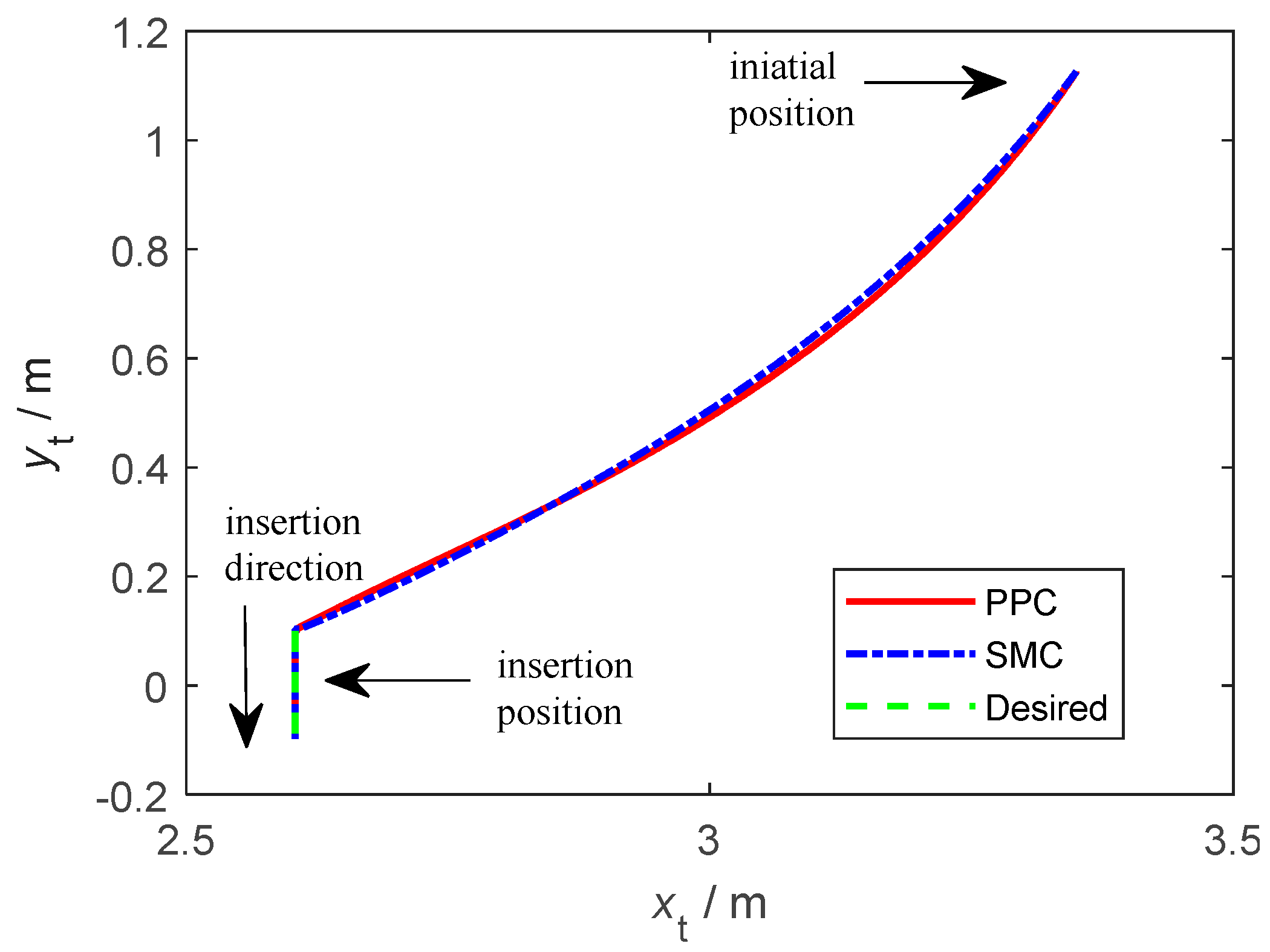
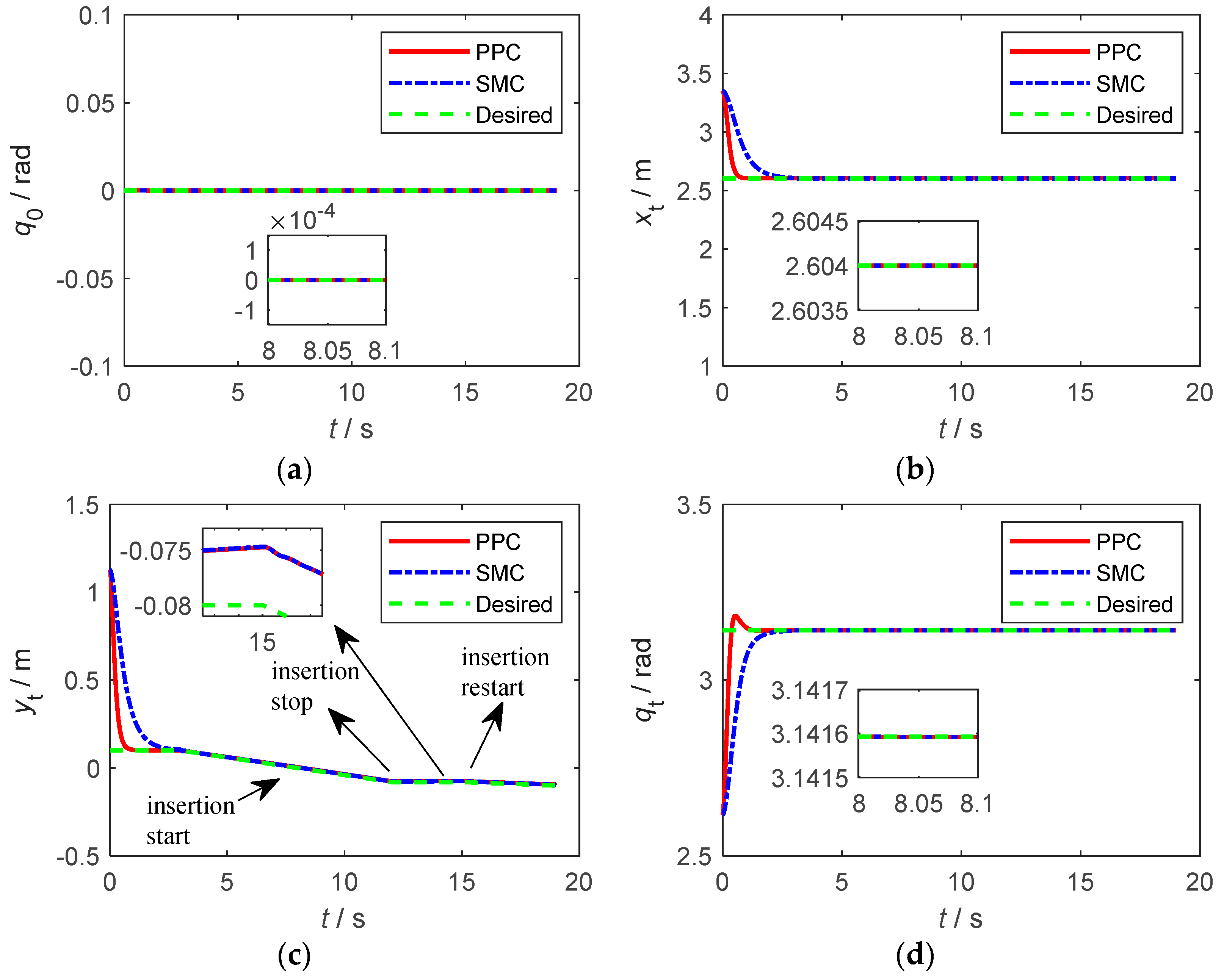
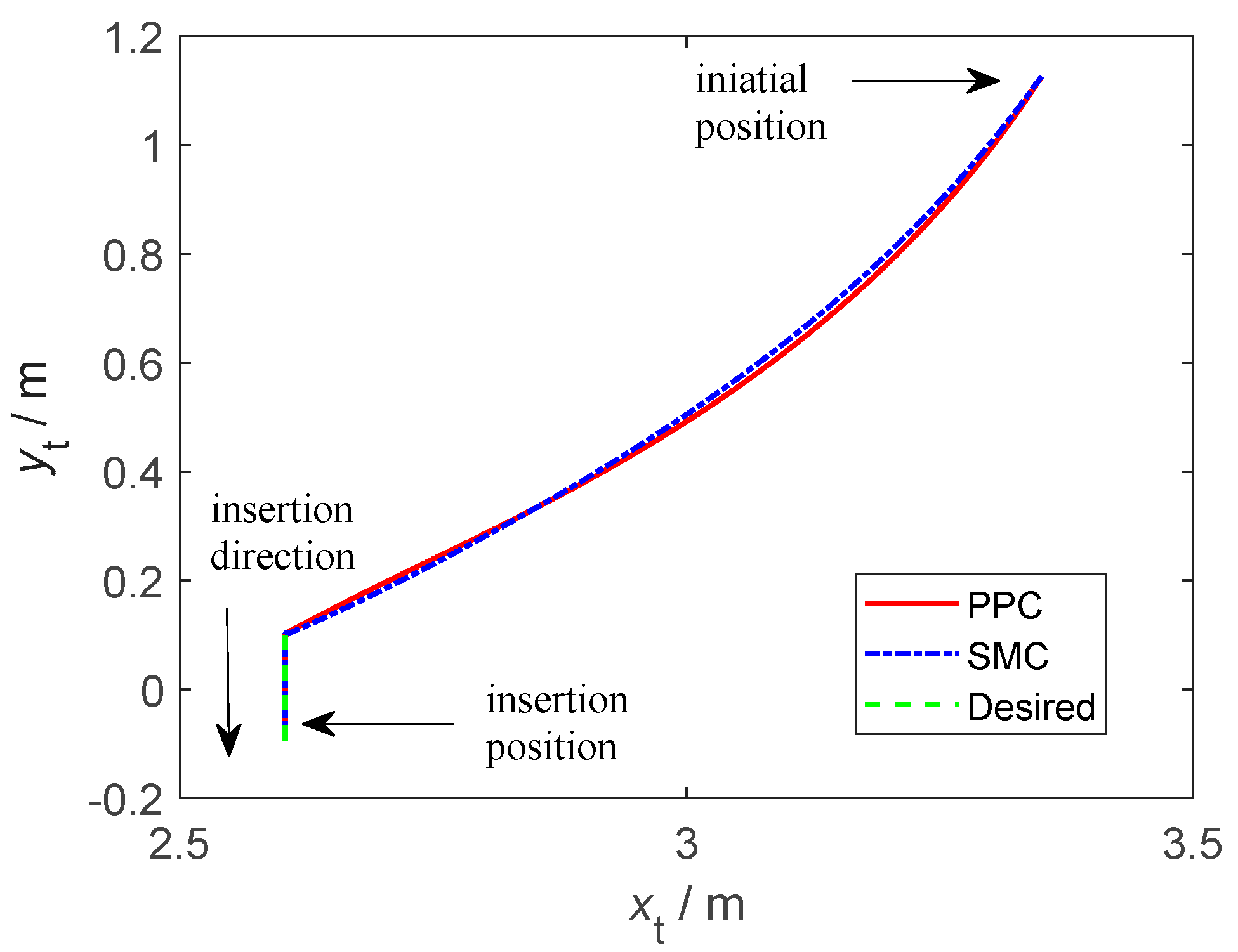
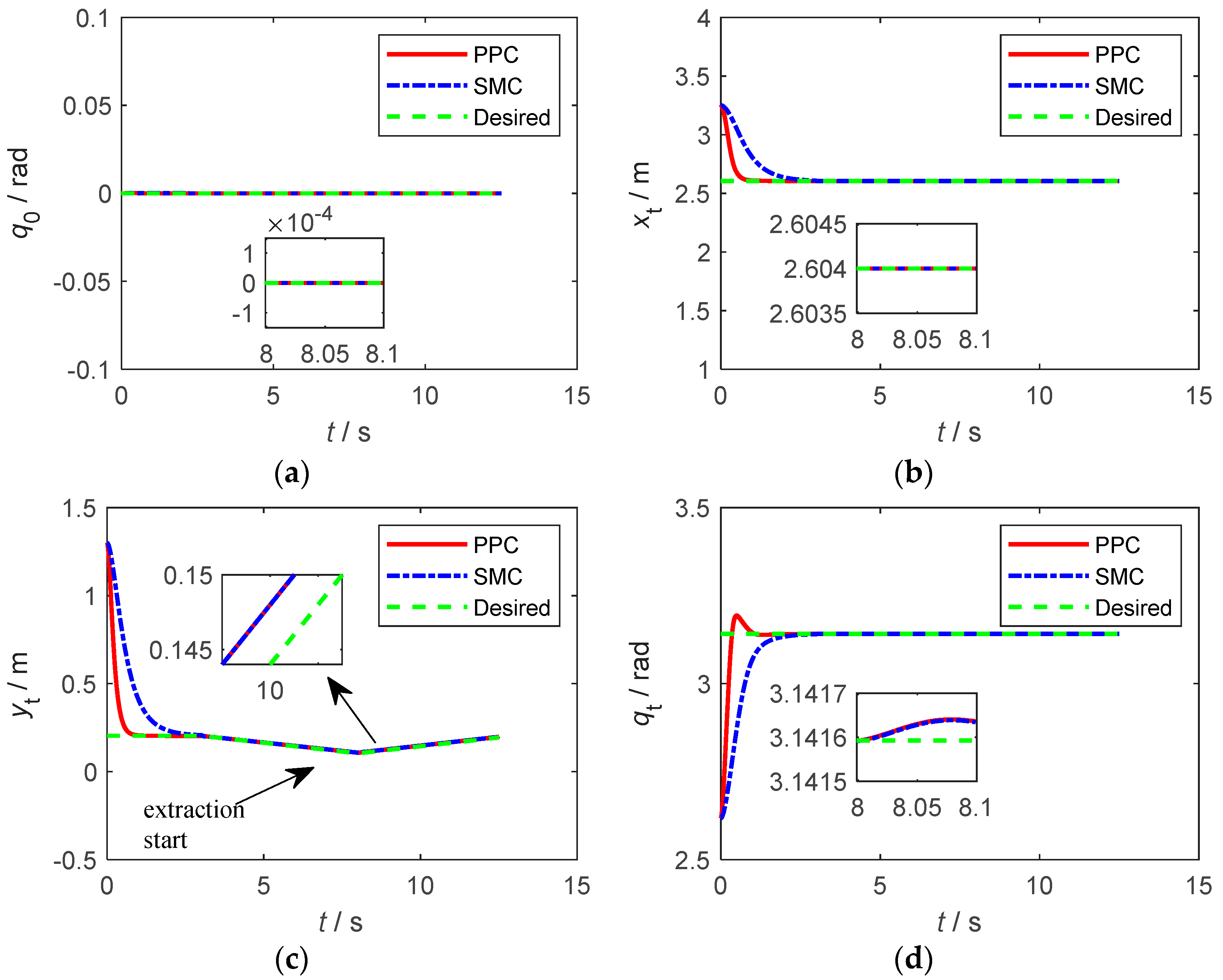
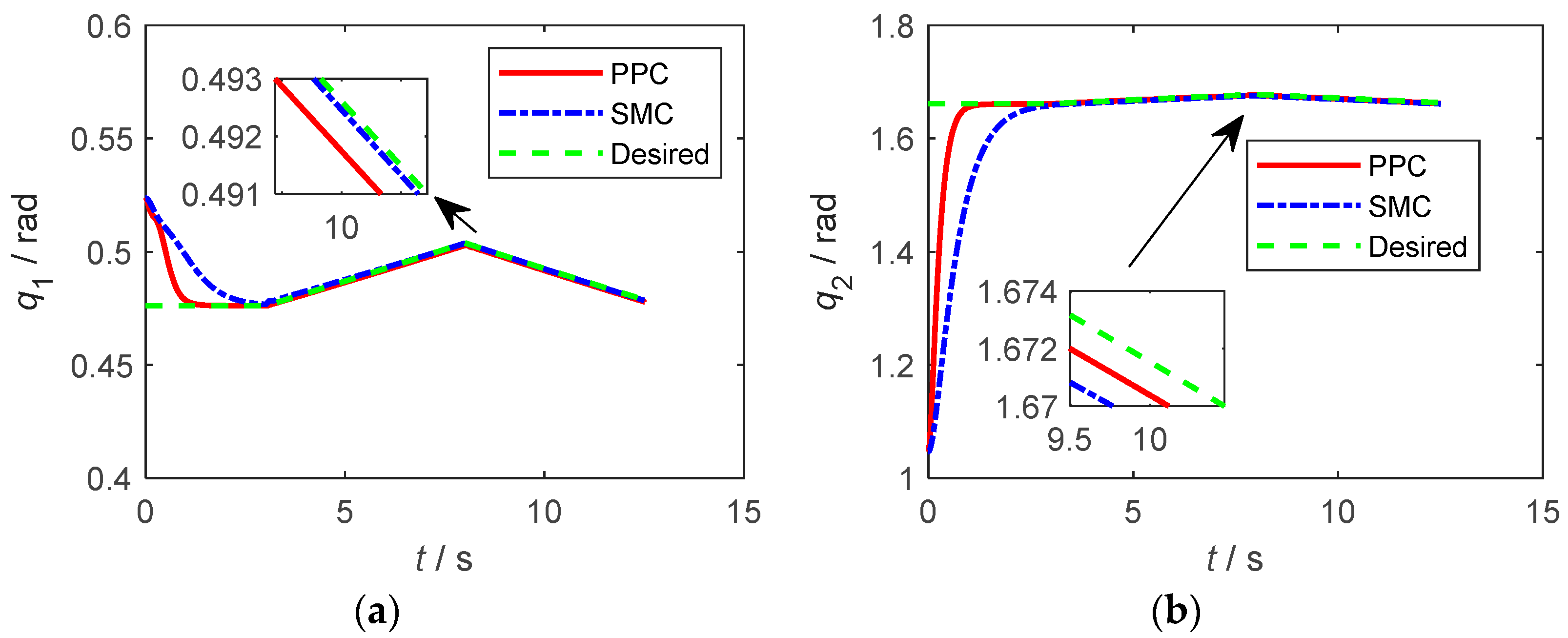
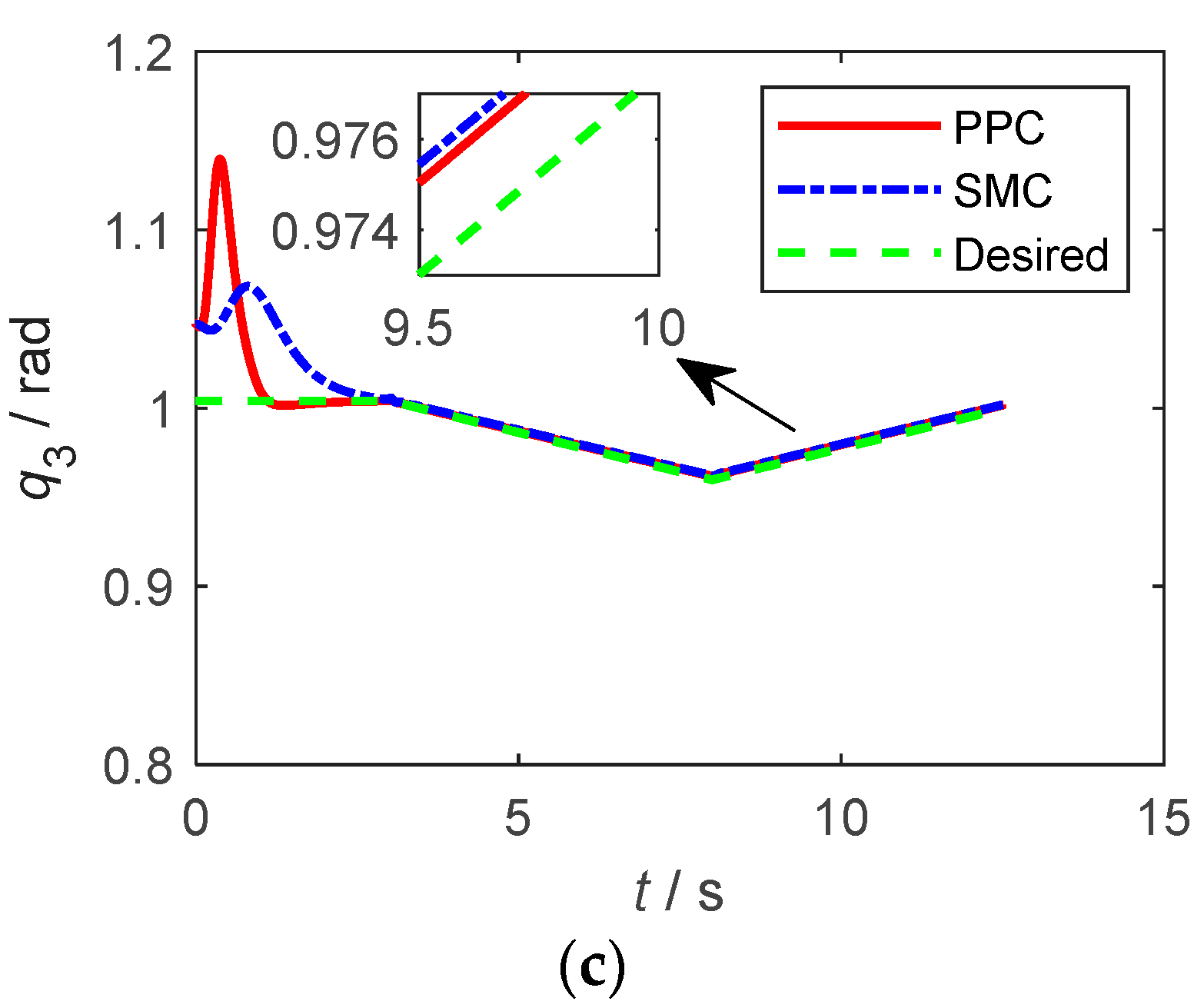
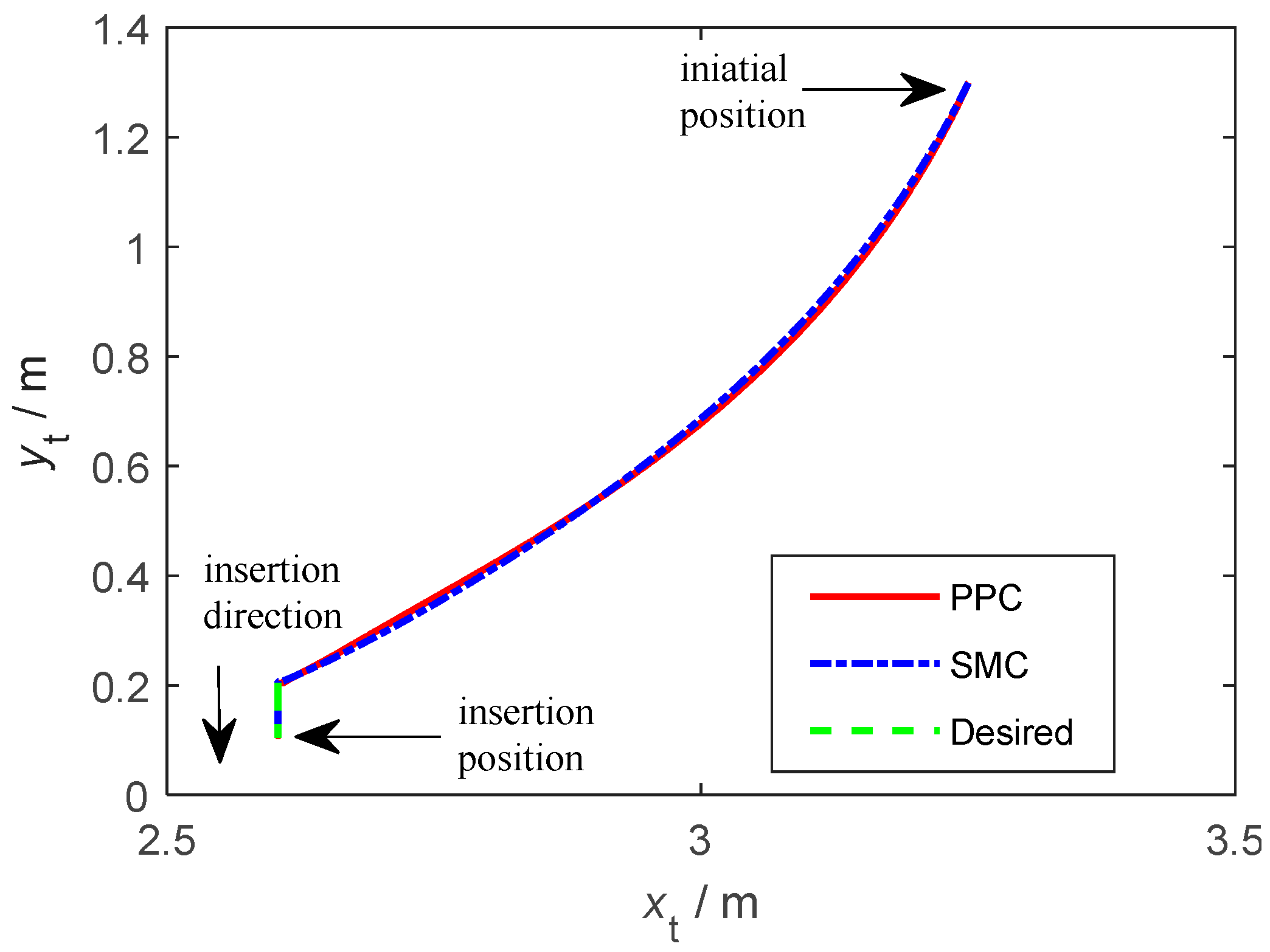
- The space robot successfully realized the operation of on-orbit insertion and extraction under the setting of simulation conditions. In addition, the vertical inserting and extracting and precise position tracking are ensured by the proposed algorithm. Therefore, the adverse effects brought out by the impact are also reduced.
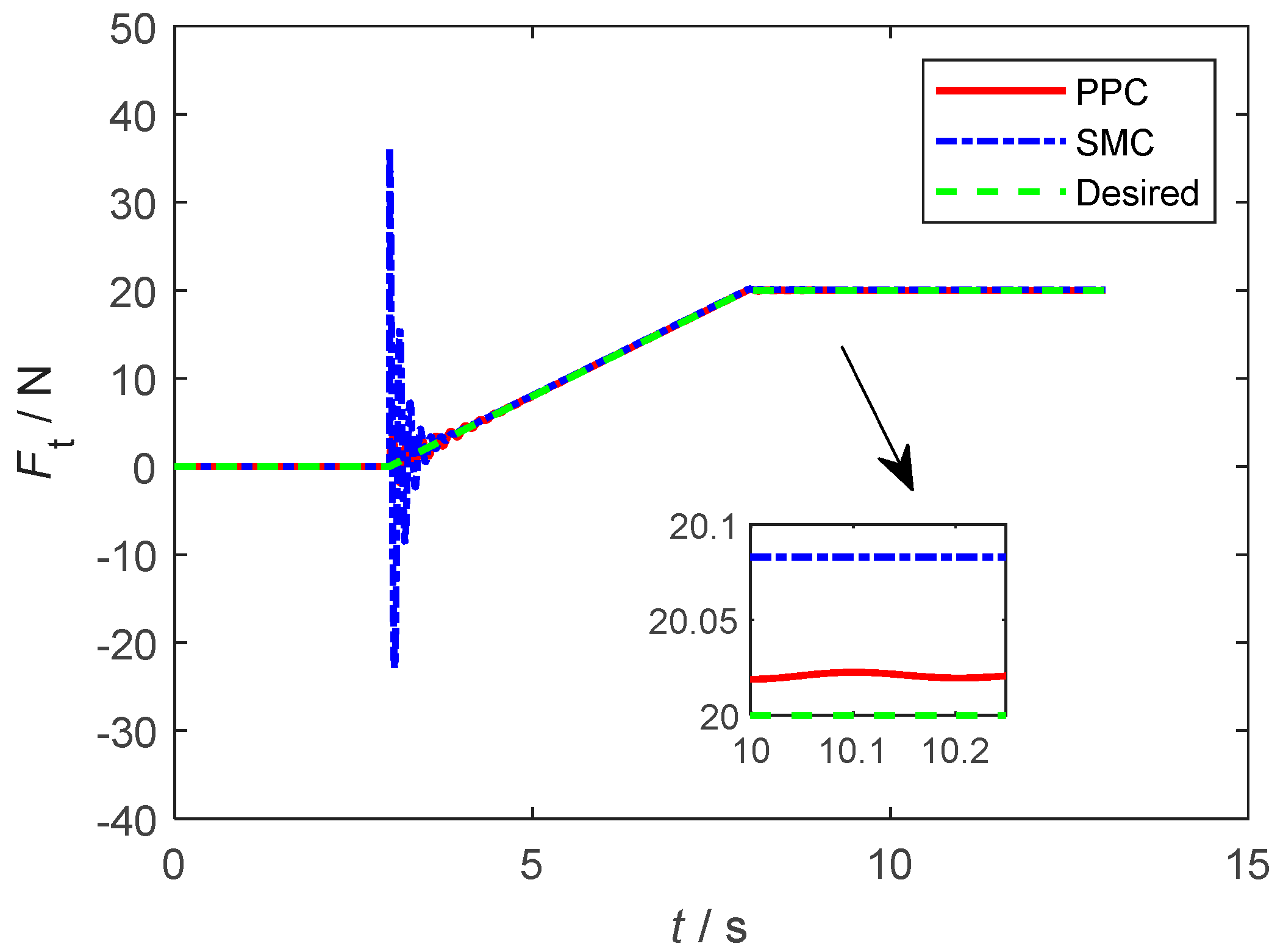
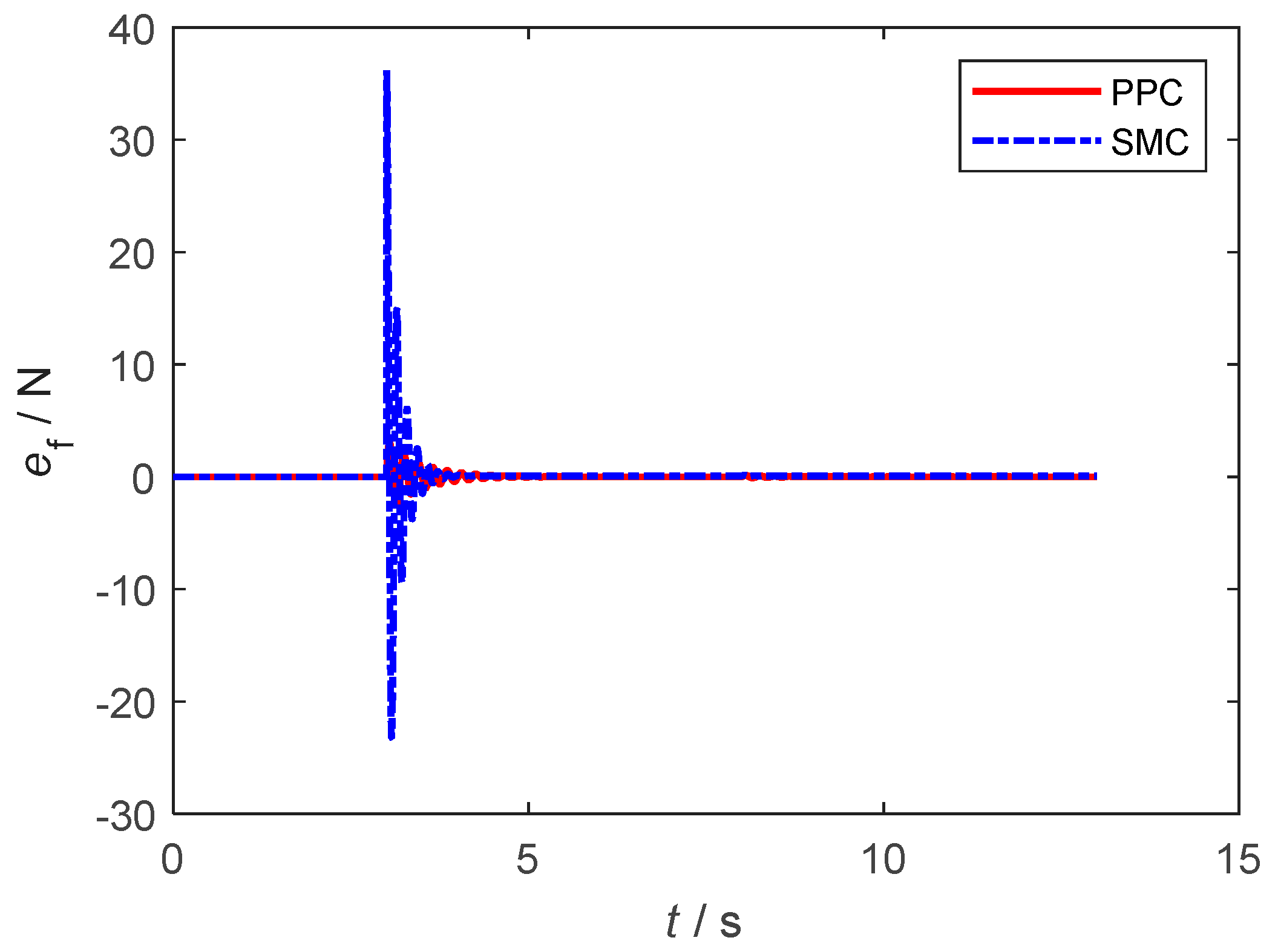
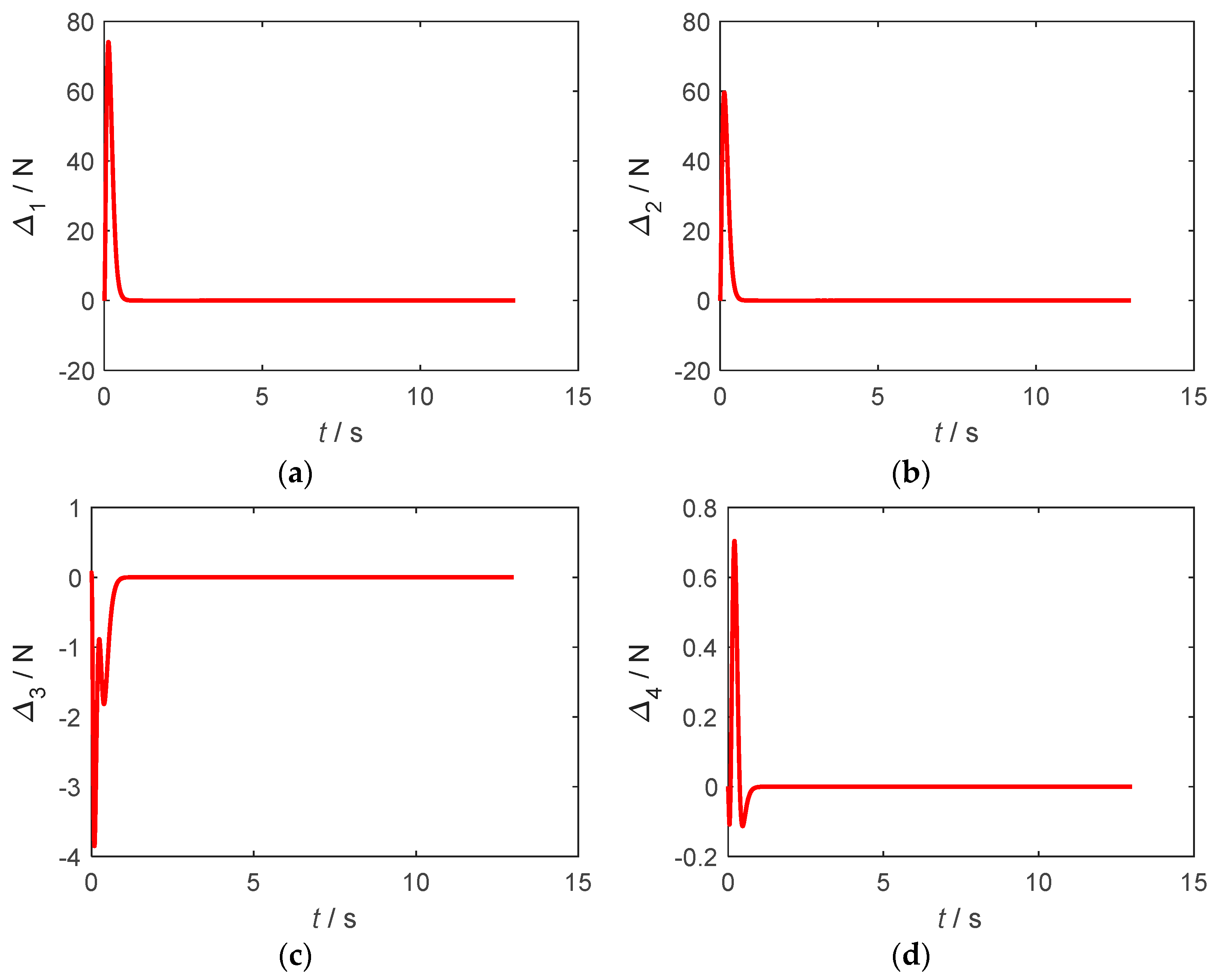
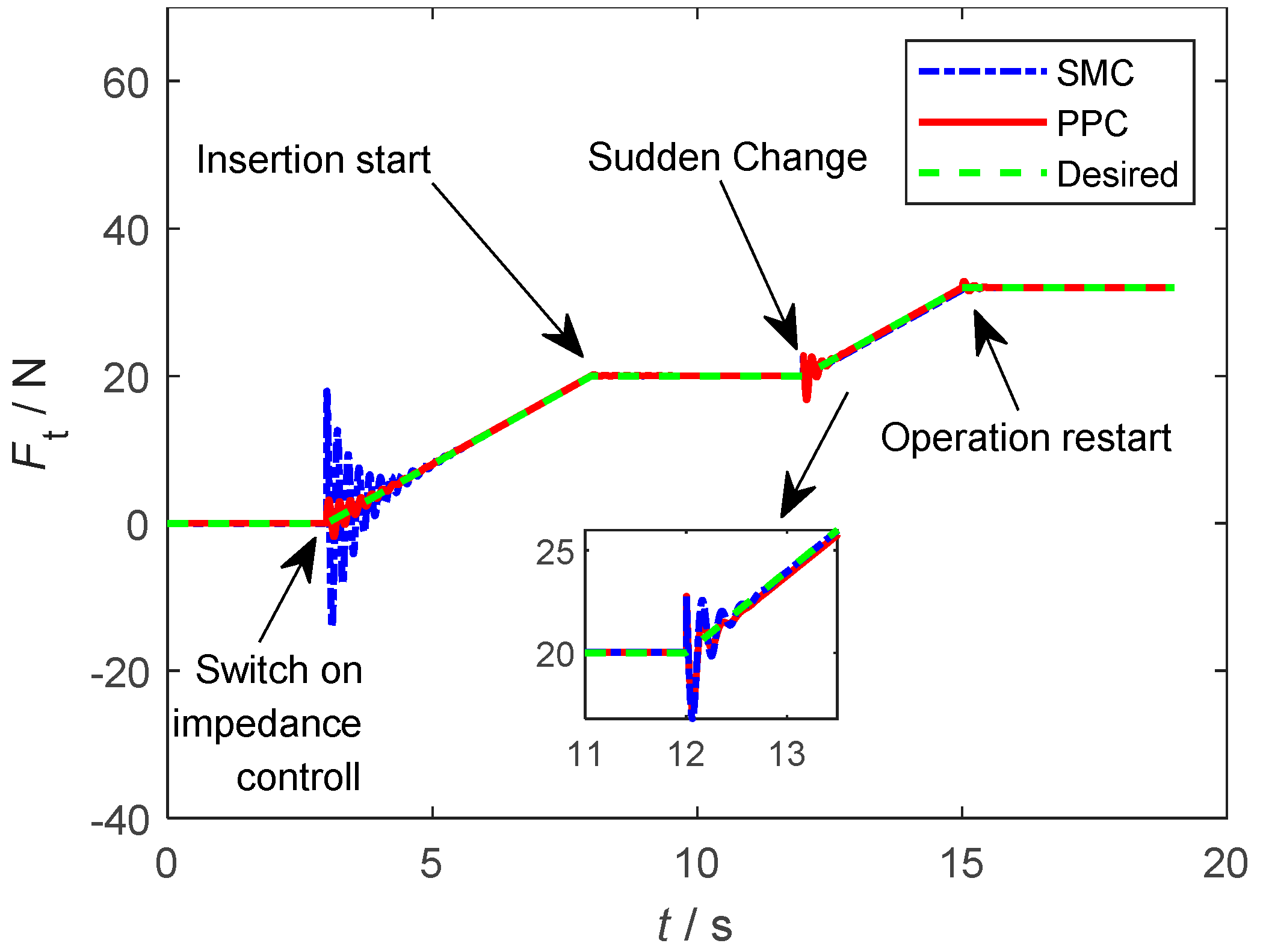
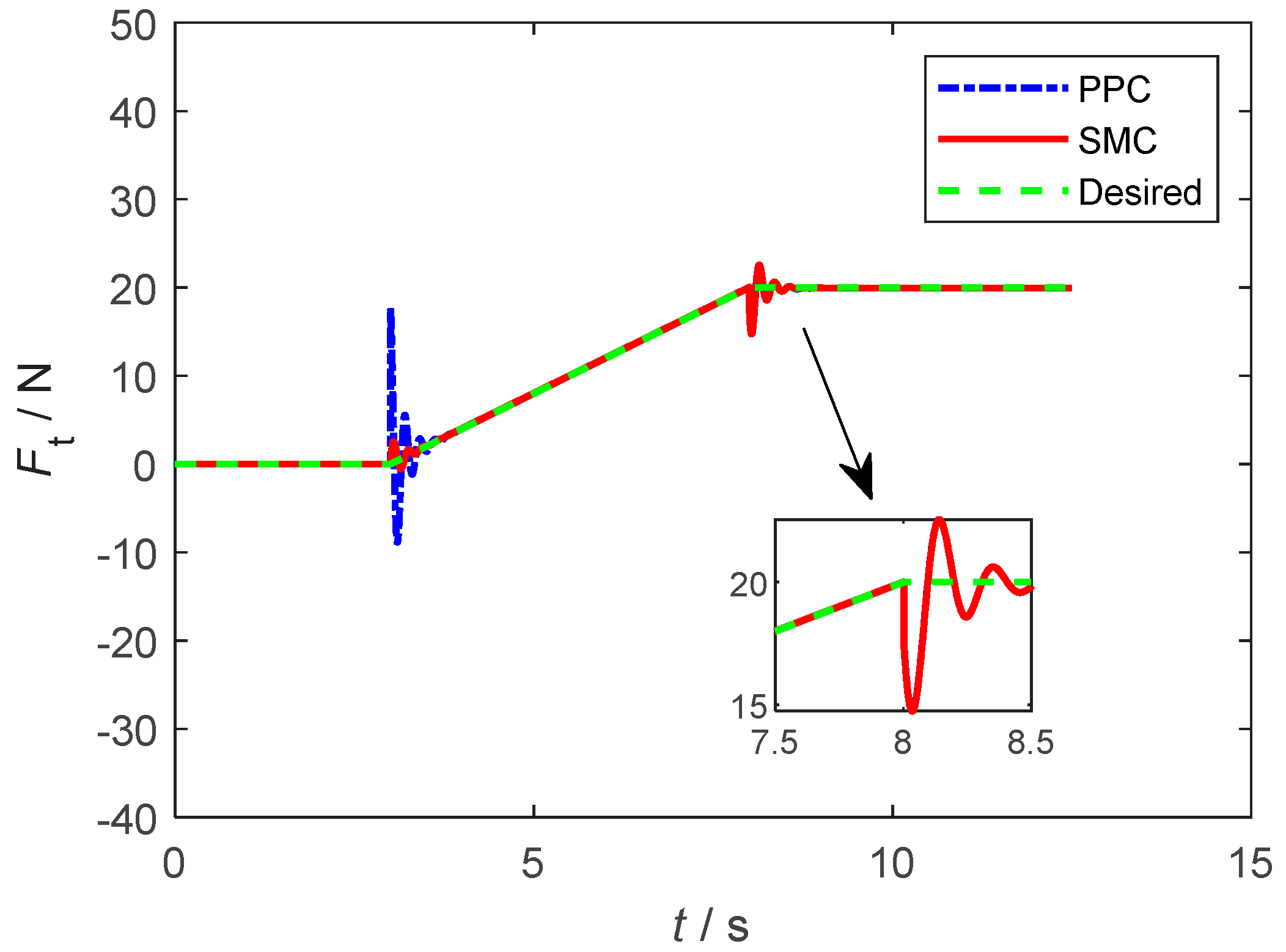
- The output force of the manipulator end is tracked precisely and stably, which is good for these operations. The controlled system is robust which can adjust its output force according to the actual change of friction.
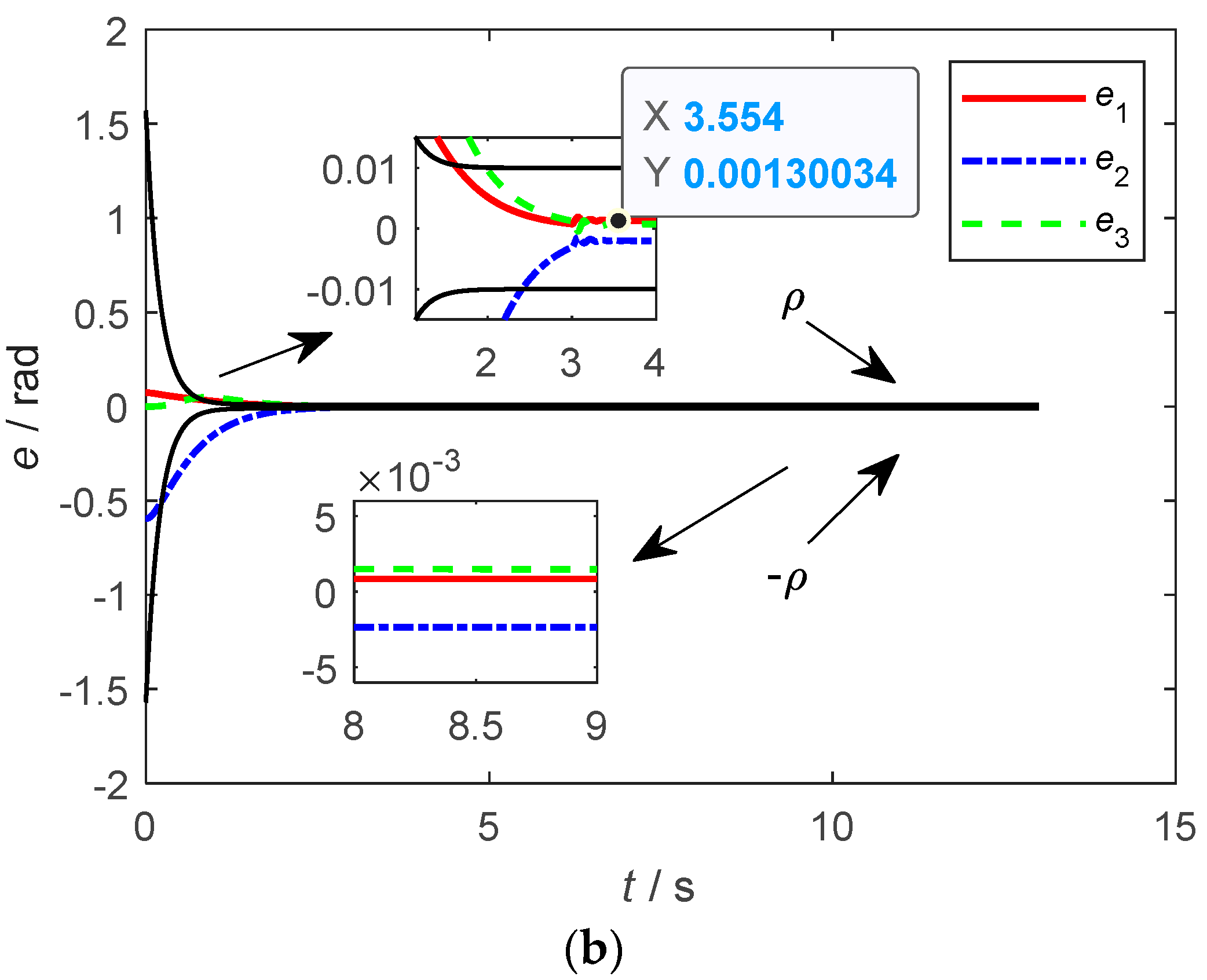
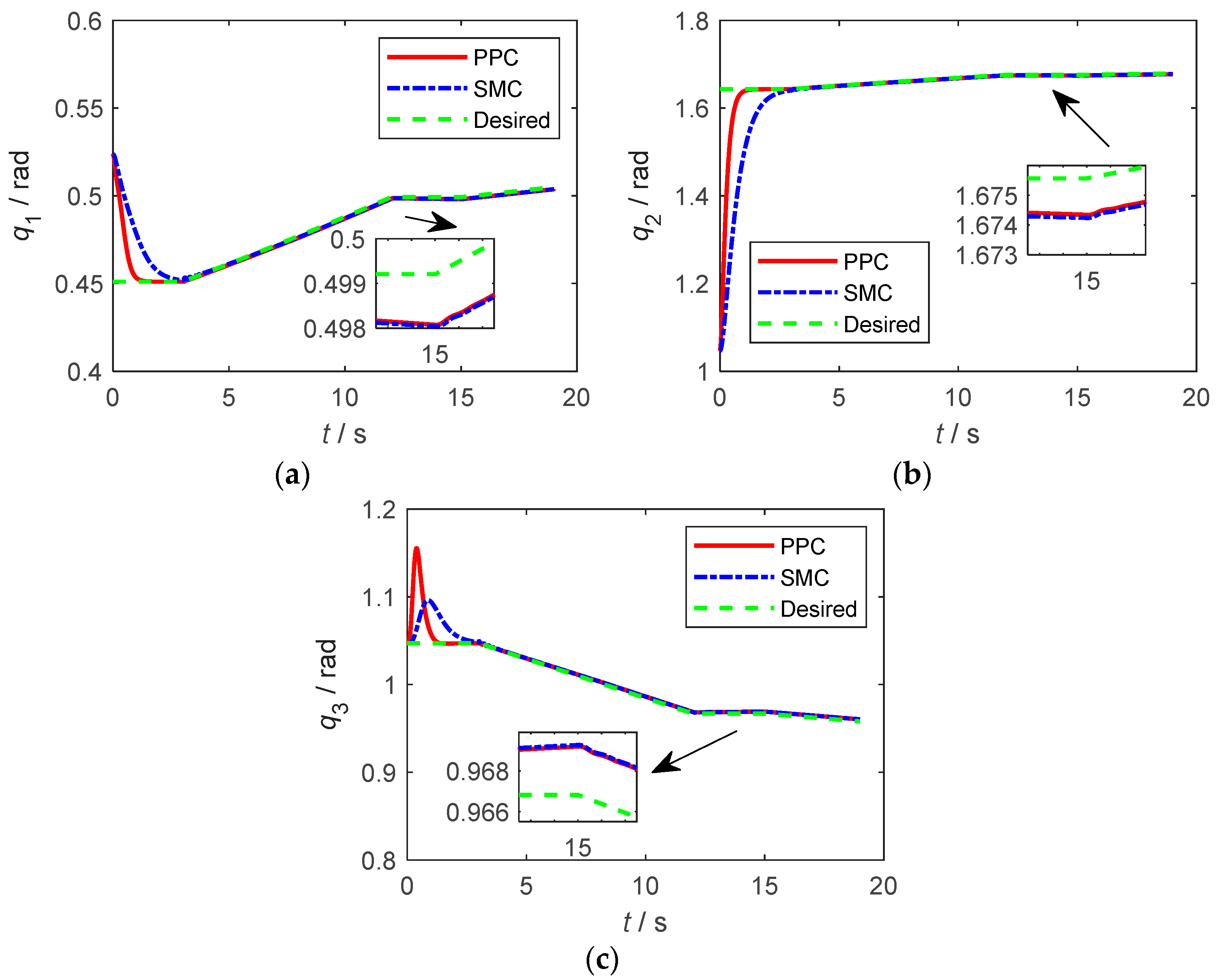
- Compared with sliding mode controller, the PPC controller has a better convergence performance and a higher control accuracy. The calculation amount of PPC controller is reduced due to the acceleration signal is avoided being introduced and its control parameters are easy to be adjusted. This would benefit to the popularization and application of this method in practical engineering scenarios.
Author Contributions
Funding
Informed Consent Statement
Conflicts of Interest
Appendix A. System Dynamic Modeling and Motion Jacobian
References
- Nguyen, P.; Ravindran, R.; Carr, R.; Gossain, D.; Doetsch, K. Structural flexibility of the Shuttle remote manipulator system mechanical arm. In Proceedings of the Guidance & Control Conference, San Diego, CA, USA, 9–11 August 1982; pp. 246–256. [Google Scholar]
- Cocuzza, S.; Pretto, I.; Debei, S. Least-Squares-Based Reaction Control of Space Manipulators. J. Guid. Control Dyn. 2012, 35, 976–986. [Google Scholar] [CrossRef]
- Sands, T. Development of deterministic artificial intelligence for unmanned underwater vehicles (UUV). J. Mar. Sci. Eng. 2020, 8, 578. [Google Scholar] [CrossRef]
- Wu, J.; Wang, J.; You, Z. An overview of dynamic parameter identification of robots. Robot. Comput.-Integr. Manuf. 2010, 26, 414–419. [Google Scholar] [CrossRef]
- Liu, X.; Li, H.; Wang, J.; Cai, G. Dynamics analysis of flexible space robot with joint friction. Aerosp. Sci. Technol. 2015, 47, 164–176. [Google Scholar] [CrossRef]
- Flores-Abad, A.; Ma, O.; Pham, K.; Ulrich, S. A review of space robotics technologies for on-orbit servicing. Prog. Aerosp. Sci. 2014, 68, 1–26. [Google Scholar] [CrossRef] [Green Version]
- Antonelli, G.; Caccavale, F.; Chiacchio, P. A systematic procedure for the identification of dynamic parameters of robot manipulators. Robotica 1999, 17, 427–435. [Google Scholar] [CrossRef]
- Gautier, M. Dynamic identification of robots with power model. In Proceedings of the International Conference on Robotics and Automation, Albuquerque, NM, USA, 25 April 1997; Volume 3, pp. 1922–1927. [Google Scholar]
- Beschi, M.; Villagrossi, E.; Pedrocchi, N.; Tosatti, L.M. A general analytical procedure for robot dynamic model reduction. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 4127–4132. [Google Scholar]
- Iriarte, X.; Ros, J.; Mata, V.; Aginaga, J. Determination of the symbolic base inertial parameters of planar mechanisms. Eur. J. Mech.-A/Solids 2017, 61, 82–91. [Google Scholar] [CrossRef]
- de Wit, C.C.; Olsson, H.; Astrom, K.J.; Lischinsky, P. A new model for control of systems with friction. IEEE Trans. Autom. Control 1995, 40, 419–425. [Google Scholar] [CrossRef] [Green Version]
- Cheng, J.; Chen, L. Mechanical analysis and calm control of dual-arm space robot for capturing a satellite. Lixue Xuebao Chin. J. Theor. Appl. Mech. 2016, 48, 832–842. [Google Scholar]
- Ai, H.; Chen, L. Force/position fuzzy control of space robot capturing spacecraft by dual-arm clamping. J. Harbin Eng. Univ. 2020, 41, 1847–1853. [Google Scholar]
- Fu, X.; Ai, H.; Chen, L. Repetitive learning sliding mode stabilization control for a flexible-base, flexible-link and flexible-joint space robot capturing a satellite. Appl. Sci. 2021, 11, 2076. [Google Scholar] [CrossRef]
- Ai, H.; Zhu, A.; Wang, J.; Yu, X.; Chen, L. Buffer compliance control of space robots capturing a non-cooperative spacecraft based on reinforcement learning. Appl. Sci. 2021, 11, 5783. [Google Scholar] [CrossRef]
- Liu, Y.; Yu, Z.; Liu, X.; Chen, J.; Cai, G. Active detumbling technology for noncooperative space target with energy dissipation. Adv. Space Res. 2019, 63, 1813–1823. [Google Scholar] [CrossRef]
- Han, D.; Liu, Z.; Huang, P. Capture and Detumble of a Non-cooperative Target without a Specific Gripping Point by a Dual-arm Space Robot. Adv. Space Res. 2022, 69, 3770–3784. [Google Scholar] [CrossRef]
- Dai, H.; Cao, X.; Jing, X.; Wang, X.; Yue, X. Bio-inspired anti-impact manipulator for capturing non-cooperative spacecraft: Theory and experiment. Mech. Syst. Signal Process. 2020, 142, 106785. [Google Scholar] [CrossRef]
- Yan, W.; Liu, Y.; Lan, Q.; Zhang, T.; Tu, H. Trajectory planning and low-chattering fixed-time nonsingular terminal sliding mode control for a dual-arm free-floating space robot. Robotica 2022, 40, 625–645. [Google Scholar] [CrossRef]
- Seraji, H.; Colbaugh, R. Force tracking in impedance control. In Proceedings of the IEEE International Conference on Robotics and Automation, Atlanta, GA, USA, 2–6 May 1993; Volume 2, pp. 499–506. [Google Scholar]
- Lange, F.; Bertleff, W.; Suppa, M. Force and trajectory control of industrial robots in stiff contact. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 2927–2934. [Google Scholar]
- Roveda, L.; Iannacci, N.; Vicentini, F.; Pedrocchi, N.; Braghin, F.; Tosatti, L.M. Optimal Impedance Force-Tracking Control Design with Impact Formulation for Interaction Tasks. IEEE Robot. Autom. Lett. 2016, 1, 130–136. [Google Scholar] [CrossRef]
- Kizir, S.; Elşavi, A. Position-Based Fractional-Order Impedance Control of a 2 DOF Serial Manipulator. Robotica 2021, 39, 1560–1574. [Google Scholar] [CrossRef]
- Izadbakhsh, A.; Khorashadizadeh, S. Polynomial-Based Robust Adaptive Impedance Control of Electrically Driven Robots. Robotica 2021, 39, 1181–1201. [Google Scholar] [CrossRef]
- Polverini, M.P.; Zanchettin, A.M.; Castello, S.; Rocco, P. Sensorless and constraint-based peg-in-hole task execution with a dual-arm robot. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 415–420. [Google Scholar]
- Yao, Y.; Ding, L.; Ma, R.; Wang, Y. Robust Control for a Cable-driven Aerial Manipulator with Joint Flexibility in Joint Space. Control Decis. 2021, 1893, online ahead of print. [Google Scholar]
- Jia, Q.; Yuan, B.; Chen, G.; Fu, Y. Adaptive fuzzy terminal sliding mode control for the free-floating space manipulator with free-swinging joint failure. Chin. J. Aeronaut. 2021, 34, 178–198. [Google Scholar] [CrossRef]
- Zhan, B.; Jin, M.; Yang, G.; Zhang, C. A novel strategy for space manipulator detumbling a non-cooperative target with collision avoidance. Adv. Space Res. 2020, 66, 785–799. [Google Scholar] [CrossRef]
- Yang, Y. Analytic LQR design for spacecraft control system based on quaternion model. J. Aerosp. Eng. 2011, 25, 448–453. [Google Scholar] [CrossRef]
- Mehrzad, S.; Mehdi, K.; Arun, K. Dynamic analysis and trajectory tracking of a tethered space robot. Acta Astronaut. 2016, 128, 335–342. [Google Scholar]
- Li, Y.; Hao, X.; She, Y.; Li, S.; Yu, M. Constrained motion planning of free-float dual-arm space manipulator via deep reinforcement learning. Aerosp. Sci. Technol. 2021, 109, 106446. [Google Scholar] [CrossRef]
- Bechlioulis, C.P.; Rovithakis, G.A. Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance. IEEE Trans. Autom. Control 2008, 53, 2090–2099. [Google Scholar] [CrossRef]
- Wei, C.; Luo, J.; Ma, C.; Dai, H.; Yua, J. Event-triggered neuroadaptive control for postcapture spacecraft with ultralow-frequency actuator updates. Neurocomputing 2018, 315, 310–321. [Google Scholar] [CrossRef]
- Yao, Q. Adaptive trajectory tracking control of a free-flying space manipulator with guaranteed prescribed performance and actuator saturation. Acta Astronaut. 2021, 185, 283–298. [Google Scholar] [CrossRef]
- Li, X.; Luo, X.; Wang, J.; Guan, X. Finite-time consensus of nonlinear multi-agent system with prescribed performance. Nonlinear Dyn. 2018, 91, 2397–2409. [Google Scholar] [CrossRef]




















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, D.; Ai, H.; Chen, L. Impedance Control of Space Robot On-Orbit Insertion and Extraction Based on Prescribed Performance Method. Appl. Sci. 2022, 12, 5147. https://doi.org/10.3390/app12105147
Liu D, Ai H, Chen L. Impedance Control of Space Robot On-Orbit Insertion and Extraction Based on Prescribed Performance Method. Applied Sciences. 2022; 12(10):5147. https://doi.org/10.3390/app12105147
Chicago/Turabian StyleLiu, Dongbo, Haiping Ai, and Li Chen. 2022. "Impedance Control of Space Robot On-Orbit Insertion and Extraction Based on Prescribed Performance Method" Applied Sciences 12, no. 10: 5147. https://doi.org/10.3390/app12105147
APA StyleLiu, D., Ai, H., & Chen, L. (2022). Impedance Control of Space Robot On-Orbit Insertion and Extraction Based on Prescribed Performance Method. Applied Sciences, 12(10), 5147. https://doi.org/10.3390/app12105147