
Estimation of Litho-Fluid Facies Distribution from Zero-Offset Acoustic and Shear Impedances



Abstract
:1. Introduction
2. Seismic Anisotropy
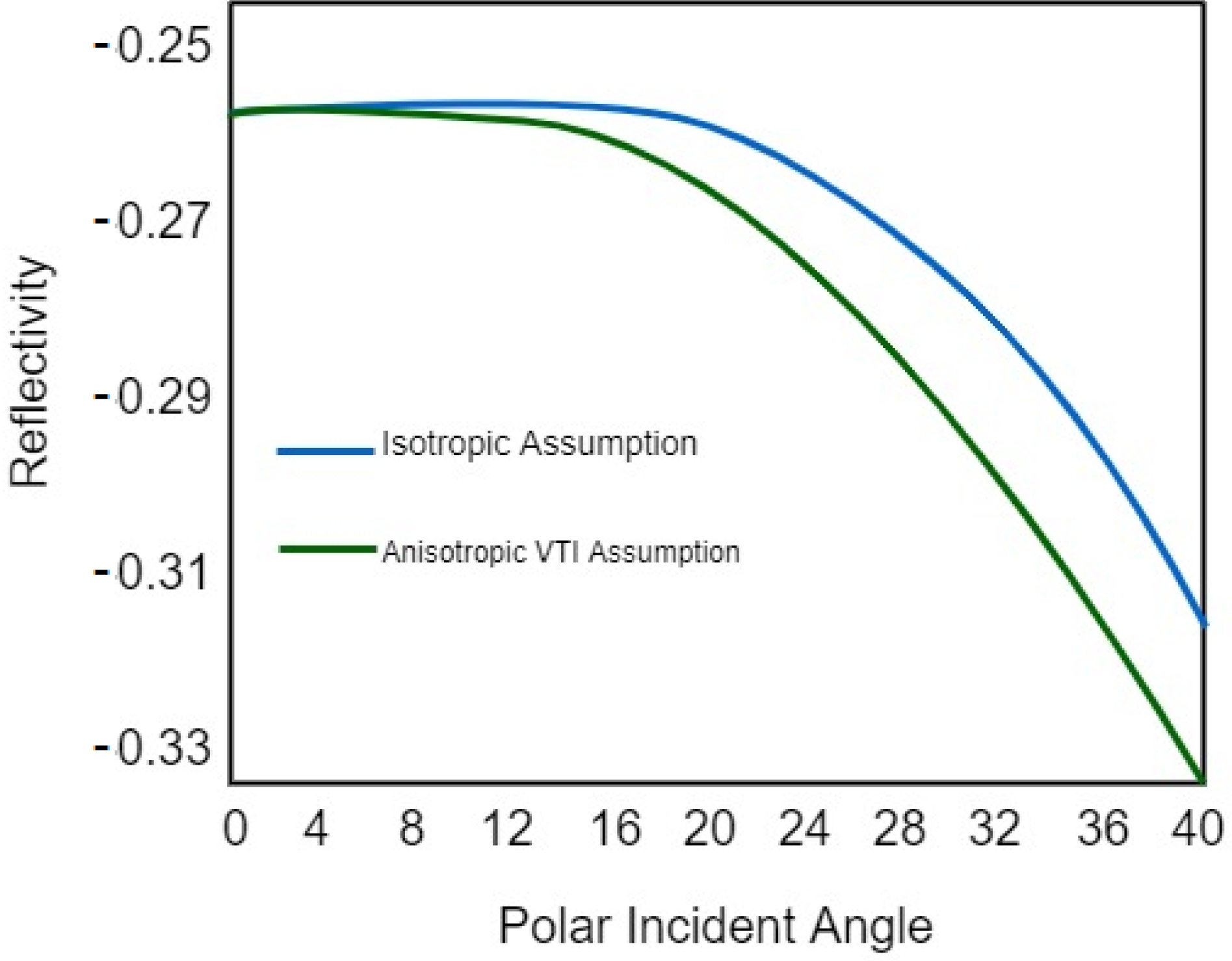
3. The Effect of Seismic Anisotropy on Seismic Data
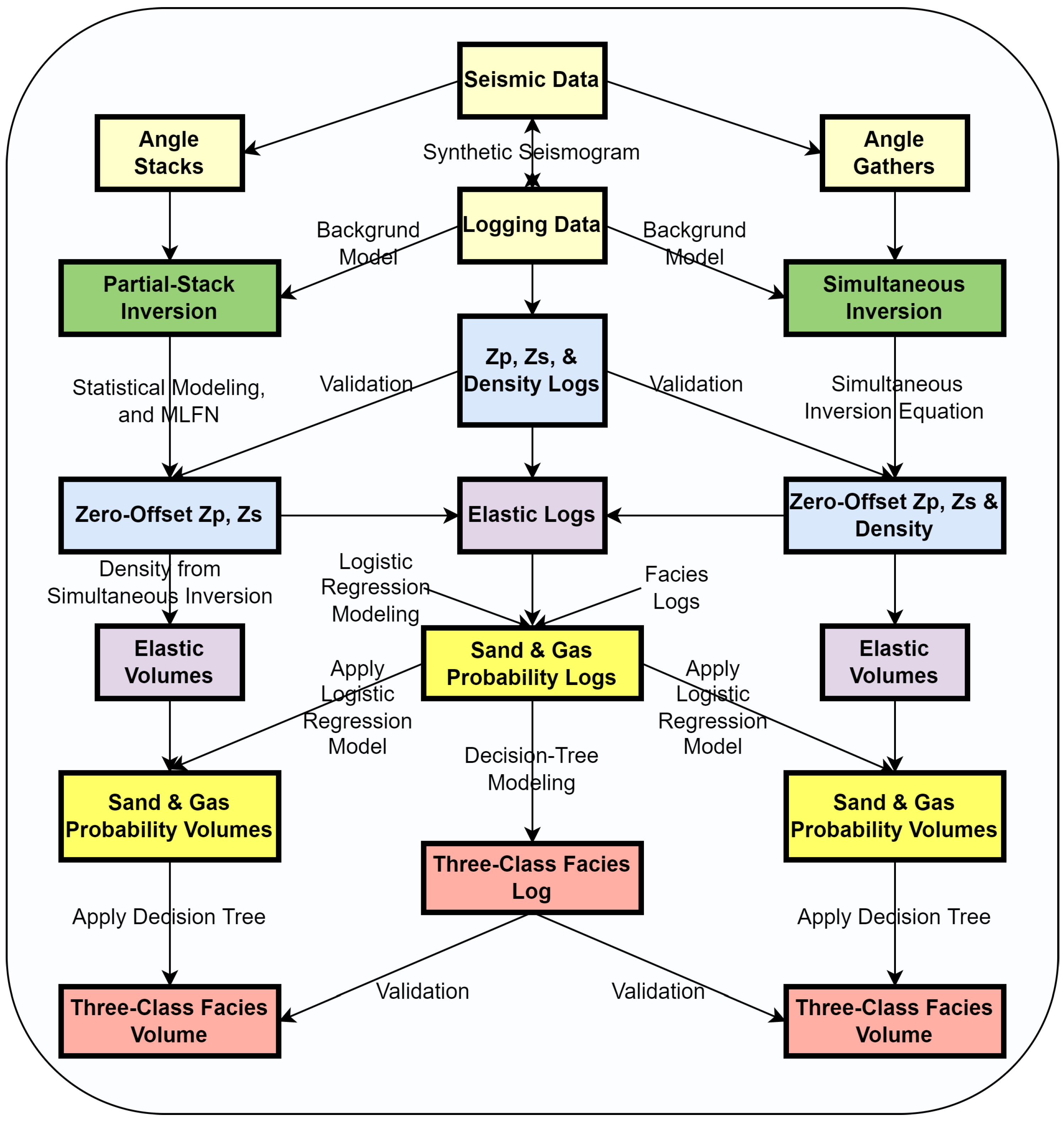
4. Methodology
4.1. Isotropic Simultaneous Inversion
4.2. Partial-Log-Constrained Inversion
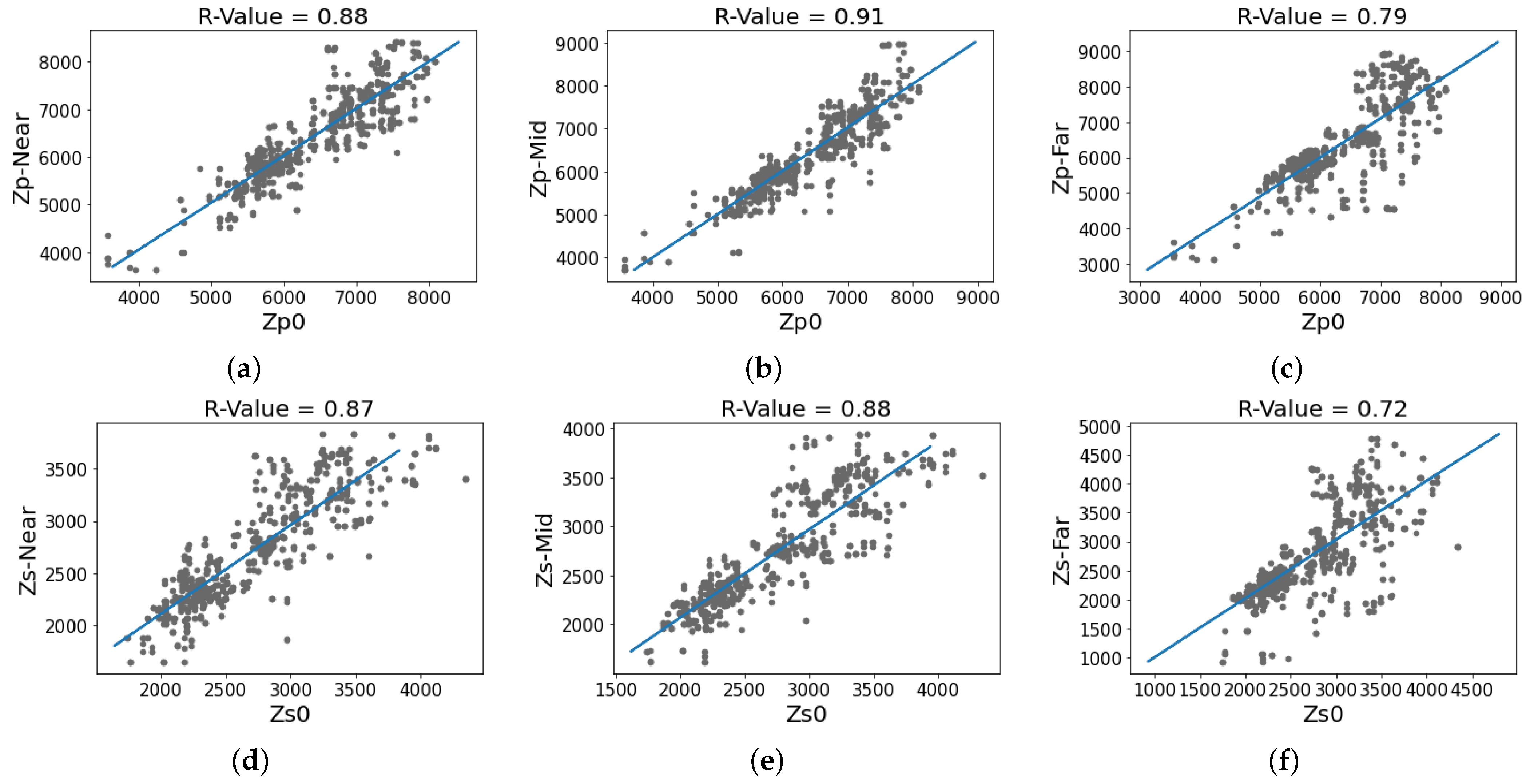
4.3. Zero-Offset Impedance Modeling
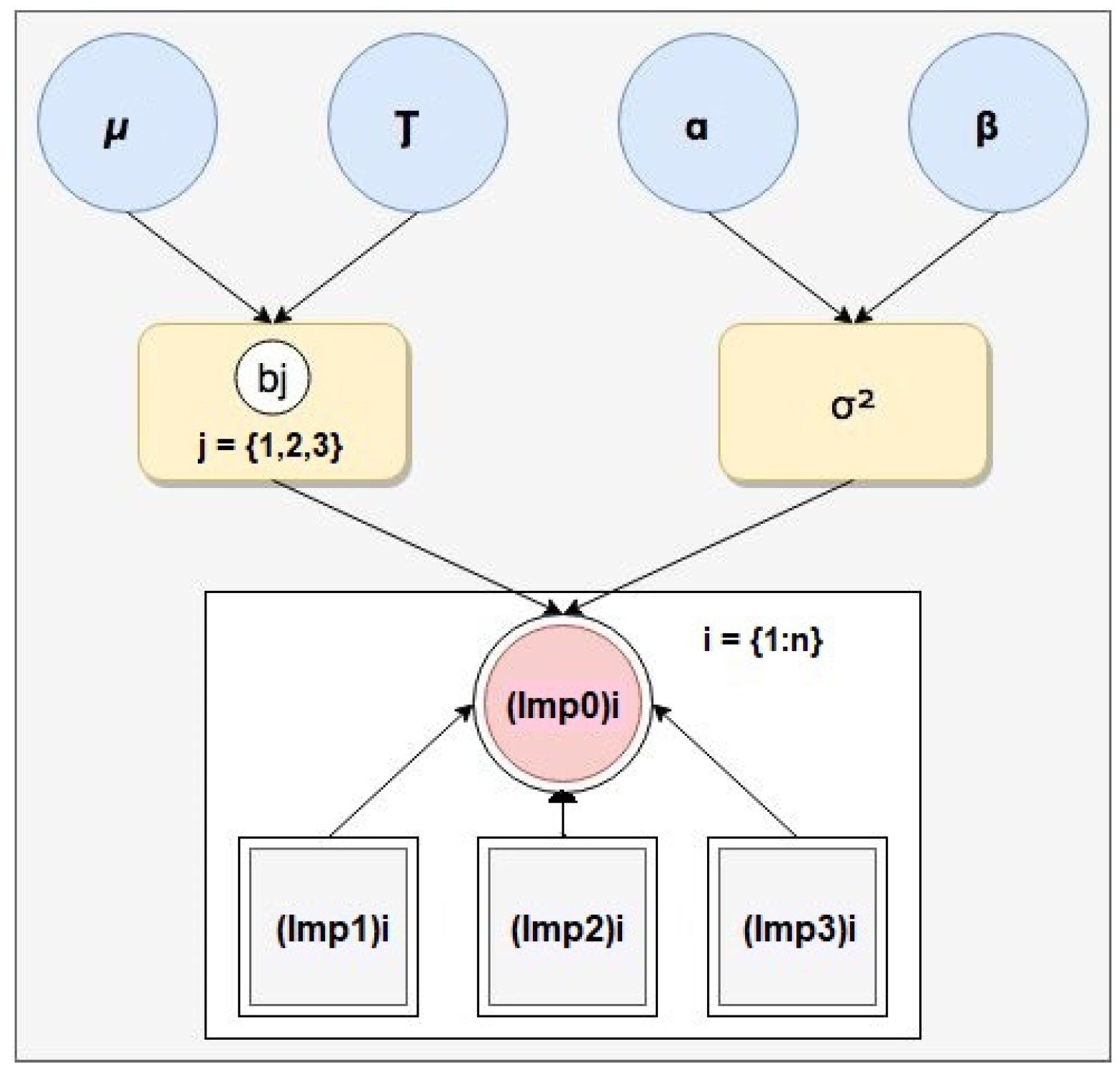
4.3.1. Statistical Modeling
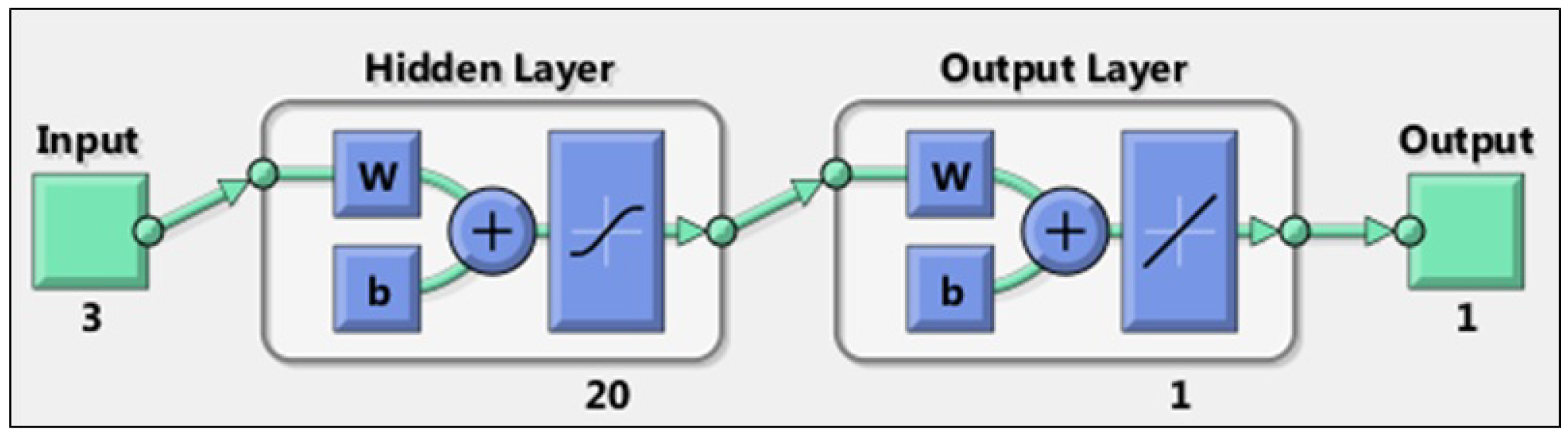
4.3.2. Multilayer Feed-Forward Neural Network (MLFN)
4.4. Calculation of the Anisotropy Parameters: Epsilon and Delta
4.5. Estimation of Facies Distribution
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| MLFN | Multi Layer Feed Forward |
| ML | Machine Learning |
| ANN | Artificial Neural Network |
| CNN | Convolutional Neural Network |
| SVM | Support Vector Machine |
| BT | Bagged Tree |
| RVM | Relevance Vector Machine |
| SRG | Seed Region Growing |
| SOM | Self-Organizing Map |
| PCA | Principal Component Analysis |
| GTM | Generative Topographic Mapping |
| EI | Elastic Impedance |
| MR | Mu-Rho |
| LR | Lambda-Rho |
| PR | Poisson’s Ratio |
| VTI | Vertical Transverse Isotropy |
| TI | Transverse Isotropy |
| TTI | Tilted Transverse Isotropy |
| AVO | Amplitude Versus Offset |
| MCMC | Markov Chain Monte Carlo |
| VSP | Vertical Seismic Profile |
| Vsh | Shale Volume |
| DEM | Differential Effective Medium |
| ADP | Anisotropic Dual Porosity |
| SCA | Self-Consistent Approximation |
| HTI | Horizontal Transverse Isotropy |
| MRF | Markov-Random Field |
| SD | Standard Deviation |
| CCR | Correct Classification Rate |
| OMRI | Oil-Mud Resistivity Imager |
References
- Hampson, D.; Todorov, T.; Russell, B. Using multi-attribute transforms to predict log properties from seismic data. Explor. Geophys. 2000, 31, 481–487. [Google Scholar] [CrossRef]
- Dubucq, D.; Busman, S.; Van Riel, P. Turbidite reservoir characterization: Multi-offset stack inversion for reservoir delineation and porosity estimation; A Golf of Guinea example. In SEG Technical Program Expanded Abstracts 2001; Society of Exploration Geophysicists: Houston, TX, USA, 2001; pp. 609–612. [Google Scholar]
- Johansen, T.A.; Spikes, K.; Dvorkin, J. Strategy for estimation of lithology and reservoir properties from seismic velocities and density. In SEG Technical Program Expanded Abstracts 2004; Society of Exploration Geophysicists: Houston, TX, USA, 2004; pp. 1726–1729. [Google Scholar]
- Ganguli, S.S.; Vedanti, N.; Dimri, V. 4D reservoir characterization using well log data for feasible CO2-enhanced oil recovery at Ankleshwar, Cambay Basin-A rock physics diagnostic and modeling approach. J. Appl. Geophys. 2016, 135, 111–121. [Google Scholar] [CrossRef]
- Ganguli, S.S. Integrated Reservoir Studies for CO2-Enhanced Oil Recovery and Sequestration: Application to an Indian Mature Oil Field; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Russell, B.H. The Application of Multivariate Statistics and Neural Networks to the Prediction of Reservoir Parameters Using Seismic Attributes. Ph.D. Thesis, University of Calgary, Calgary, AB, Canada, 2004. [Google Scholar]
- Bachrach, R. Joint estimation of porosity and saturation using stochastic rock-physics modeling. Geophysics 2006, 71, O53–O63. [Google Scholar] [CrossRef]
- Doyen, P. Seismic Reservoir Characterization: An Earth Modelling Perspective; EAGE Publications: Houten, The Netherlands, 2007; Volume 2. [Google Scholar]
- Hu, H.; Yin, X.; Wu, G. Joint inversion of petrophysical parameters based on Bayesian classification. Geophys. Prospect. Pet. 2012, 51, 225–232. [Google Scholar]
- Yin, X.Y.; Sun, R.Y.; Wang, B.L.; Zhang, G.Z. Simultaneous inversion of petrophysical parameters based on geostatistical a priori information. Appl. Geophys. 2014, 11, 311–320. [Google Scholar] [CrossRef]
- Di Luca, M.; Salinas, T.; Arminio, J.F.; Alvarez, G.; Alvarez, P.; Bolivar, F.; Marín, W. Seismic inversion and AVO analysis applied to predictive-modeling gas-condensate sands for exploration and early production in the Lower Magdalena Basin, Colombia. Lead. Edge 2014, 33, 746–756. [Google Scholar] [CrossRef] [Green Version]
- Yoong, A.A.; Lubis, L.A.; Ghosh, D.P. Application of Simultaneous Inversion Method to Predict the Lithology and Fluid Distribution in “X” Field, Malay Basin. Proc. IOP Conf. Ser. Earth Environ. Sci. 2016, 38, 012007. [Google Scholar] [CrossRef] [Green Version]
- Babasafari, A.A.; Ghosh, D.P.; Salim, A.M.A.; Ratnam, T.; Sambo, C.; Rezaee, S. Petro-elastic modeling for enhancement of hydrocarbon prediction: Case study in Southeast Asia. In SEG Technical Program Expanded Abstracts 2018; Society of Exploration Geophysicists: Houston, TX, USA, 2018; pp. 3141–3145. [Google Scholar]
- Babasafari, A.A.; Ghosh, D.; Salim, A.M.A.; Alashloo, S.Y.M. Rock Physics Modeling Assisted Reservoir Properties Prediction: Case Study in Malay Basin. Int. J. Eng. Technol. 2018, 7, 24–28. [Google Scholar] [CrossRef]
- de Figueiredo, L.P.; Grana, D.; Bordignon, F.L.; Santos, M.; Roisenberg, M.; Rodrigues, B.B. Joint Bayesian inversion based on rock-physics prior modeling for the estimation of spatially correlated reservoir properties. Geophysics 2018, 83, M49–M61. [Google Scholar] [CrossRef]
- Saikia, P.; Baruah, R.D.; Singh, S.K.; Chaudhuri, P.K. Artificial Neural Networks in the Domain of Reservoir Characterization: A Review From Shallow to Deep Models. Comput. Geosci. 2020, 135, 104357. [Google Scholar] [CrossRef]
- Verma, A.K.; Cheadle, B.A.; Routray, A.; Mohanty, W.K.; Mansinha, L. Porosity and Permeability Estimation Using Neural Network Approach From Well Log Data. In Proceedings of the GeoConvention Vision Conference, Calgary, AB, Canada, 14–18 May 2012. [Google Scholar]
- Cao, J.; Yang, J.; Wang, Y.; Wang, D.; Shi, Y. Extreme Learning Machine for Reservoir Parameter Estimation in Heterogeneous Sandstone Reservoir. Math. Probl. Eng. 2015, 2015. [Google Scholar] [CrossRef]
- Okon, A.N.; Adewole, S.E.; Uguma, E.M. Artificial Neural Network Model for Reservoir Petrophysical Properties: Porosity, Permeability and Water Saturation Prediction. Model. Earth Syst. Environ. 2021, 7, 2373–2390. [Google Scholar] [CrossRef]
- Ahmadi, M.A.; Zendehboudi, S.; Lohi, A.; Elkamel, A.; Chatzis, I. Reservoir permeability prediction by neural networks combined with hybrid genetic algorithm and particle swarm optimization. Geophys. Prospect. 2013, 61, 582–598. [Google Scholar] [CrossRef]
- Gholami, R.; Moradzadeh, A.; Maleki, S.; Amiri, S.; Hanachi, J. Applications of Artificial Intelligence Methods in Prediction of Permeability in Hydrocarbon Reservoirs. J. Pet. Sci. Eng. 2014, 122, 643–656. [Google Scholar] [CrossRef]
- Liu, S.; Zolfaghari, A.; Sattarin, S.; Dahaghi, A.K.; Negahban, S. Application of Neural Networks in Multiphase Flow Through Porous Media: Predicting Capillary Pressure and Relative Permeability Curves. J. Pet. Sci. Eng. 2019, 180, 445–455. [Google Scholar] [CrossRef]
- Asoodeh, M.; Bagheripour, P. Prediction of Compressional, Shear, and Stoneley Wave Velocities From Conventional Well Log Data Using a Committee Machine With Intelligent Systems. Rock Mech. Rock Eng. 2012, 45, 45–63. [Google Scholar] [CrossRef]
- Akhundi, H.; Ghafoori, M.; Lashkaripour, G.R. Prediction of Shear Wave Velocity Using Artificial Neural Network Technique, Multiple Regression and Petrophysical Data: A Case Study in Asmari Reservoir (SW Iran). Open J. Geol. 2014, 2014. [Google Scholar] [CrossRef] [Green Version]
- Anemangely, M.; Ramezanzadeh, A.; Tokhmechi, B. Shear Wave Travel Time Estimation from Petrophysical Logs Using ANFIS-PSO Algorithm: A Case Study From Ab-Teymour Oilfield. J. Nat. Gas Sci. Eng. 2017, 38, 373–387. [Google Scholar] [CrossRef]
- Anemangely, M.; Ramezanzadeh, A.; Amiri, H.; Hoseinpour, S.A. Machine Learning Technique for the Prediction of Shear Wave Velocity Using Petrophysical Logs. J. Pet. Sci. Eng. 2019, 174, 306–327. [Google Scholar] [CrossRef]
- Li, H.; Lin, J.; Wu, B.; Gao, J.; Liu, N. Elastic Properties Estimation From Prestack Seismic Data Using GGCNNs and Application on Tight Sandstone Reservoir Characterization. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–21. [Google Scholar] [CrossRef]
- Validov, M.F.; Nurgaliev, D.K.; Sudakov, V.A.; Murtazin, T.A.; Golod, K.A.; Galimova, A.R.; Shamsiev, R.R.; Lutfullin, A.A.; Amerhanov, M.I.; Aslyamov, N.A. The Use of Neural Network Technologies in Prediction the Reservoir Properties of Unconsolidated Reservoir Rocks of Shallow Bitumen Deposits. In Proceedings of the SPE Annual Caspian Technical Conference, OnePetro, Virtual Event, 1–5 October 2021. [Google Scholar]
- Weinzierl, W.; Wiese, B. Deep Learning a Poroelastic Rock-Physics Model For Pressure and Saturation Discrimination Deep Learning a Rock-Physics Model. Geophysics 2021, 86, MR53–MR66. [Google Scholar] [CrossRef]
- Banerjee, A.; Chatterjee, R. Mapping of Reservoir Properties Using Model-Based Seismic Inversion and Neural Network Architecture in Raniganj Basin, India. J. Geol. Soc. India 2022, 98, 479–486. [Google Scholar] [CrossRef]
- Kapur, L.; Lake, L.W.; Sepehrnoori, K.; Herrick, D.C.; Kalkomey, C.T. Facies Prediction From Core and Log Data Using Artificial Neural Network Technology. In Proceedings of the SPWLA 39th annual logging symposium. Society of Petrophysicists and Well-Log Analysts, Keystone, CO, USA, 26–28 May 1998. [Google Scholar]
- Wang, G.; Carr, T.R. Organic-rich Marcellus Shale Lithofacies Modeling and Distribution Pattern Analysis in the Appalachian Basin. AAPG Bull. 2013, 97, 2173–2205. [Google Scholar] [CrossRef] [Green Version]
- Zhang, G.; Wang, Z.; Chen, Y. Deep learning for seismic lithology prediction. Geophys. J. Int. 2018, 215, 1368–1387. [Google Scholar] [CrossRef]
- Li, F.; Zhou, H.; Wang, Z.; Wu, X. ADDCNN: An attention-based deep dilated convolutional neural network for seismic facies analysis with interpretable spatial–spectral maps. IEEE Trans. Geosci. Remote Sens. 2020, 59, 1733–1744. [Google Scholar] [CrossRef]
- Feng, R.; Balling, N.; Grana, D.; Dramsch, J.S.; Hansen, T.M. Bayesian Convolutional Neural Networks for Seismic Facies Classification. IEEE Trans. Geosci. Remote Sens. 2021, 59, 8933–8940. [Google Scholar] [CrossRef]
- Al-Anazi, A.; Gates, I. A support vector machine algorithm to classify lithofacies and model permeability in heterogeneous reservoirs. Eng. Geol. 2010, 114, 267–277. [Google Scholar] [CrossRef]
- Saraswat, P.; Sen, M.K. Artificial immune-based self-organizing maps for seismic-facies analysis. Geophysics 2012, 77, O45–O53. [Google Scholar] [CrossRef]
- Roy, A. Latent Space Classification of Seismic Facies; The University of Oklahoma: Norman, OK, USA, 2013. [Google Scholar]
- Torres, A.; Reveron, J.; Infante, J. Lithofacies discrimination using support vector machines, rock physics and simultaneous seismic inversion in clastic reservoirs in the Orinoco Oil Belt, Venezuela. In Proceedings of the 2013 SEG Annual Meeting, OnePetro, Houston, TX, USA, 1–3 October 2013. [Google Scholar]
- Wang, G.; Carr, T.R.; Ju, Y.; Li, C. Identifying organic-rich Marcellus Shale lithofacies by support vector machine classifier in the Appalachian basin. Comput. Geosci. 2014, 64, 52–60. [Google Scholar] [CrossRef]
- Hall, B. Facies classification using machine learning. Lead. Edge 2016, 35, 906–909. [Google Scholar] [CrossRef]
- Amraee, T.; Ranjbar, S. Transient instability prediction using decision tree technique. IEEE Trans. Power Syst. 2013, 28, 3028–3037. [Google Scholar] [CrossRef]
- Keynejad, S.; Sbar, M.L.; Johnson, R.A. Assessment of machine-learning techniques in predicting lithofluid facies logs in hydrocarbon wells. Interpretation 2019, 7, SF1–SF13. [Google Scholar] [CrossRef]
- Liu, X.; Chen, X.; Li, J.; Zhou, X.; Chen, Y. Facies identification based on multikernel relevance vector machine. IEEE Trans. Geosci. Remote Sens. 2020, 58, 7269–7282. [Google Scholar] [CrossRef]
- Liu, J.; Dai, X.; Gan, L.; Liu, L.; Lu, W. Supervised seismic facies analysis based on image segmentation. Geophysics 2018, 83, O25–O30. [Google Scholar] [CrossRef]
- Liu, R.; Zhang, B.; Wang, X. Patterns classification in assisting seismic-facies analysis. In SEG Technical Program Expanded Abstracts 2017; Society of Exploration Geophysicists: Houston, TX, USA, 2017; pp. 2127–2131. [Google Scholar]
- Zhao, T.; Li, F.; Marfurt, K.J. Constraining self-organizing map facies analysis with stratigraphy: An approach to increase the credibility in automatic seismic facies classification. Interpretation 2017, 5, T163–T171. [Google Scholar] [CrossRef]
- Guo, H.; Marfurt, K.J.; Liu, J. Principal component spectral analysis. Geophysics 2009, 74, P35–P43. [Google Scholar] [CrossRef]
- Haykin, S.S. Neural Networks and Learning Machines, 3rd ed.; Pearson Prentice Hall: New York, NY, USA, 2009. [Google Scholar]
- Roden, R.; Smith, T.; Sacrey, D. Geologic pattern recognition from seismic attributes: Principal component analysis and self-organizing maps. Interpretation 2015, 3, SAE59–SAE83. [Google Scholar] [CrossRef]
- Roy, A.; Romero-Peláez, A.S.; Kwiatkowski, T.J.; Marfurt, K.J. Generative topographic mapping for seismic facies estimation of a carbonate wash, Veracruz Basin, southern Mexico. Interpretation 2014, 2, SA31–SA47. [Google Scholar] [CrossRef] [Green Version]
- Gouda, M.F.; Salim, A. Litho-Fluid Facies Modeling by Using Logistic Regression. Pet. Coal 2020, 62. [Google Scholar]
- Thomsen, L. Weak elastic anisotropy. Geophysics 1986, 51, 1954–1966. [Google Scholar] [CrossRef]
- Thomsen, L.; Anderson, D.L. Weak elastic anisotropy in global seismology. Geol. Soc. Am. Spec. Pap. 2015, 514, 39–50. [Google Scholar]
- Zhang, Y.; Eisner, L.; Barker, W.; Mueller, M.C.; Smith, K.L. Effective anisotropic velocity model from surface monitoring of microseismic events. Geophys. Prospect. 2013, 61, 919–930. [Google Scholar] [CrossRef] [Green Version]
- Kelter, A. Estimation of Thomsen’s anisotropy parameters from compressional and converted wave surface seismic travel-time data using NMO equations, neural networks and regridding inversion. In SEG Technical Program Expanded Abstracts 2005; Society of Exploration Geophysicists: Houston, TX, USA, 2005; pp. 120–122. [Google Scholar]
- Mainprice, D. Seismic anisotropy of the deep Earth from a mineral and rock physics perspective. In Treatise on Geophysics, 2nd ed.; Elsevier: Oxford, UK, 2015; pp. 487–538. [Google Scholar]
- Almqvist, B.S.G.; Mainprice, D. Seismic properties and anisotropy of the continental crust: Predictions based on mineral texture and rock microstructure. Rev. Geophys. 2017, 55, 367–433. [Google Scholar] [CrossRef] [Green Version]
- Love, A.E.H. A Treatise on the Mathematical Theory of Elasticity; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar]
- Bergstrom, J.S. Mechanics of Solid Polymers: Theory and Computational Modeling; William Andrew: Norwich, NY, USA, 2015. [Google Scholar]
- Thomsen, L. Understanding Seismic Anisotropy in Exploration and Exploitation; Distinguished Instructor Series; Society of Exploration Geophysicists: Houston, TX, USA, 2002; pp. 3–27. [Google Scholar]
- Anwer, H.M.; Alves, T.M.; Ali, A. Effects of sand-shale anisotropy on amplitude variation with angle (AVA) modelling: The Sawan gas field, Pakistan, as a key case-study for South Asia’s sedimentary Basins. J. Asian Earth Sci. 2017, 147, 516–531. [Google Scholar] [CrossRef] [Green Version]
- Dewhurst, D.N.; Siggins, A.F.; Sarout, J.; Raven, M.D.; Nordgård-Bolås, H.M. Geomechanical and ultrasonic characterization of a Norwegian Sea shale. Geophysics 2011, 76, WA101–WA111. [Google Scholar] [CrossRef]
- Nadri, D.; Sarout, J.; Bóna, A.; Dewhurst, D. Estimation of the anisotropy parameters of transversely isotropic shales with a tilted symmetry axis. Geophys. J. Int. 2012, 190, 1197–1203. [Google Scholar] [CrossRef] [Green Version]
- Sarout, J.; Esteban, L.; Delle Piane, C.; Maney, B.; Dewhurst, D.N. Elastic anisotropy of Opalinus Clay under variable saturation and triaxial stress. Geophys. J. Int. 2014, 198, 1662–1682. [Google Scholar] [CrossRef] [Green Version]
- Sarout, J.; Delle Piane, C.; Nadri, D.; Esteban, L.; Dewhurst, D.N. A robust experimental determination of Thomsen’s δ parameter. Geophysics 2015, 80, A19–A24. [Google Scholar] [CrossRef] [Green Version]
- Yan, F.; Han, D.H.; Chen, X.L. Practical and robust experimental determination of c13 and Thomsen parameter δ. Geophys. Prospect. 2018, 66, 354–365. [Google Scholar] [CrossRef] [Green Version]
- Yan, F.; Han, D.H.; Sil, S.; Chen, X.L. Analysis of seismic anisotropy parameters for sedimentary strata. Geophysics 2016, 81, D495–D502. [Google Scholar] [CrossRef] [Green Version]
- Backus, G.E. Long-wave elastic anisotropy produced by horizontal layering. J. Geophys. Res. 1962, 67, 4427–4440. [Google Scholar] [CrossRef] [Green Version]
- Miller, D.E.; Spencer, C. An exact inversion for anisotropic moduli from phase slowness data. J. Geophys. Res. Solid Earth 1994, 99, 21651–21657. [Google Scholar] [CrossRef]
- Miller, D.E.; Leaney, S.; Borland, W.H. An in situ estimation of anisotropic elastic moduli for a submarine shale. J. Geophys. Res. Solid Earth 1994, 99, 21659–21665. [Google Scholar] [CrossRef]
- Alkhalifah, T.; Tsvankin, I. Velocity analysis for transversely isotropic media. Geophysics 1995, 60, 1550–1566. [Google Scholar] [CrossRef]
- Li, Y. Anisotropic well logs and their applications in seismic analysis. In SEG Technical Program Expanded Abstracts 2002; Society of Exploration Geophysicists: Houston, TX, USA, 2002; pp. 2459–2462. [Google Scholar]
- Li, Y. An empirical method for estimation of anisotropic parameters in clastic rocks. Lead. Edge 2006, 25, 706–711. [Google Scholar] [CrossRef]
- Ehirim, C.; Chikezie, N. The effect of anisotropy on amplitude versus offset (AVO) synthetic modelling in Derby field southeastern Niger delta. J. Pet. Explor. Prod. Technol. 2017, 7, 667–672. [Google Scholar] [CrossRef] [Green Version]
- Bandyopadhyay, K. Seismic Anisotropy: Geological Causes and its Implications to Reservoir Geophysics; Stanford University: Standford, CA, USA, 2009. [Google Scholar]
- Hornby, B.E.; Schwartz, L.M.; Hudson, J.A. Anisotropic effective-medium modeling of the elastic properties of shales. Geophysics 1994, 59, 1570–1583. [Google Scholar] [CrossRef]
- Sun, J.; Jiang, L.; Liu, X. Anisotropic effective-medium modeling of the elastic properties of shaly sandstones. In SEG Technical Program Expanded Abstracts 2010; Society of Exploration Geophysicists: Houston, TX, USA, 2010; pp. 212–216. [Google Scholar]
- Liner, C.L.; Fei, T.W. Layer-induced seismic anisotropy from full-wave sonic logs: Theory, application, and validation. Geophysics 2006, 71, D183–D190. [Google Scholar] [CrossRef]
- Berryman, J.G.; Grechka, V.Y.; Berge, P.A. Analysis of Thomsen parameters for finely layered VTI media. Geophys. Prospect. 1999, 47, 959–978. [Google Scholar] [CrossRef] [Green Version]
- Haktorson, H. Estimation of Anisotropy Parameters and AVO modeling of the Troll field, North Sea. Master’s Thesis, Institutt for petroleumsteknologi og anvendt geofysikk, Trondheim, Norway, 2012. [Google Scholar]
- Xu, S.; Stovas, A.; Alkhalifah, T. Estimation of the anisotropy parameters from imaging moveout of diving wave in a factorized anisotropic medium. Geophysics 2016, 81, C139–C150. [Google Scholar] [CrossRef] [Green Version]
- Mesdag, P. A new approach to quantitative azimuthal inversion for stress and fracture detection. In SEG Technical Program Expanded Abstracts 2016; Society of Exploration Geophysicists: Houston, TX, USA, 2016; pp. 357–361. [Google Scholar]
- Guo, Q.; Zhang, H.; Han, F.; Shang, Z. Prestack seismic inversion based on anisotropic Markov random field. IEEE Trans. Geosci. Remote Sens. 2017, 56, 1069–1079. [Google Scholar] [CrossRef]
- Benedek, C.; Shadaydeh, M.; Kato, Z.; Szirányi, T.; Zerubia, J. Multilayer Markov random field models for change detection in optical remote sensing images. ISPRS J. Photogramm. Remote Sens. 2015, 107, 22–37. [Google Scholar] [CrossRef] [Green Version]
- Huang, L.; Gao, K.; Huang, Y.; Cladouhos, T.T. Anisotropic seismic imaging and inversion for subsurface characterization at the Blue Mountain geothermal field in Nevada. In Proceedings of the 43rd Workshop on Geothermal Reservoir Engineering, Stanford, CA, USA, 12–14 February 2018; pp. 12–14. [Google Scholar]
- Chi, B.; Dong, L.; Liu, Y. Correlation-based reflection full-waveform inversion. Geophysics 2015, 80, R189–R202. [Google Scholar] [CrossRef]
- Fu, L.; Guo, B.; Schuster, G.T. Multiscale phase inversion of seismic data. Geophysics 2018, 83, R159–R171. [Google Scholar] [CrossRef]
- Fu, L.; Symes, W.W. A discrepancy-based penalty method for extended waveform inversion. Geophysics 2017, 82, R287–R298. [Google Scholar] [CrossRef] [Green Version]
- Wei, X.; Jiang, X.; Booth, D.; Liu, Y. The inversion of seismic velocity using a partial-offset stack with well-log constraints. J. Geophys. Eng. 2006, 3, 50–58. [Google Scholar] [CrossRef]
- Gouda, M.; Salim, A.; Hamada, G. Estimation of Anisotropy-Free Acoustic Impedance from Partial-Stack Seismic Inversion: A Case Study From Inas field, Malay Basin. In Proceedings of the EAGE-GSM 2nd Asia Pacific Meeting on Near Surface Geoscience and Engineering, Kuala Lumpur, Malaysia, 24–25 April 2019. [Google Scholar]
- Hampson, D.P.; Russell, B.H.; Bankhead, B. Simultaneous inversion of pre-stack seismic data. In SEG Technical Program Expanded Abstracts 2005; Society of Exploration Geophysicists: Houston, TX, USA, 2005; pp. 1633–1637. [Google Scholar]
- Fatti, J.L.; Smith, G.C.; Vail, P.J.; Strauss, P.J.; Levitt, P.R. Detection of gas in sandstone reservoirs using AVO analysis: A 3-D seismic case history using the Geostack technique. Geophysics 1994, 59, 1362–1376. [Google Scholar] [CrossRef]
- Simmons Jr, J.L.; Backus, M.M. Waveform-based AVO inversion and AVO prediction-error. Geophysics 1996, 61, 1575–1588. [Google Scholar] [CrossRef]
- Aki, K. Quantitative seismology. Theory and Method; Freeman: San Francisco, CA, USA, 1980; pp. 304–308. [Google Scholar]
- Oldenburg, D.; Scheuer, T.; Levy, S. Recovery of the acoustic impedance from reflection seismograms. Geophysics 1983, 48, 1318–1337. [Google Scholar] [CrossRef]
- Richards, P.G.; Aki, K. Quantitative Seismology: Theory and Methods; Freeman: Stuttgart, Germany, 1980. [Google Scholar]
- Gardner, G.; Gardner, L.; Gregory, A. Formation velocity and density—The diagnostic basics for stratigraphic traps. Geophysics 1974, 39, 770–780. [Google Scholar] [CrossRef] [Green Version]
- Gao, R.; Sheng, Y. Law of large numbers for uncertain random variables with different chance distributions. J. Intell. Fuzzy Syst. 2016, 31, 1227–1234. [Google Scholar] [CrossRef] [Green Version]
- Kumar, N. Deep Learning: Feedforward Neural Networks Explained. 2019. Available online: https://medium.com/hackernoon/deep-learning-feedforward-neural-networks-explained-c34ae3f084f1 (accessed on 4 July 2022).
- Rosenblatt, F. The perceptron: A probabilistic model for information storage and organization in the brain. Psychol. Rev. 1958, 65, 386. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jain, A.K.; Mao, J.; Mohiuddin, K.M. Artificial Neural Networks: A tutorial. Computer 1996, 29, 31–44. [Google Scholar] [CrossRef] [Green Version]
- Nikravesh, M.; Zadeh, L.A.; Aminzadeh, F. Soft Computing and Intelligent Data Analysis in Oil Exploration; Elsevier: Amsterdam, The Netherlands, 2003. [Google Scholar]
- Zhang, X.; Liu, X.; Wang, X.; Band, S.S.; Bagherzadeh, S.A.; Taherifar, S.; Abdollahi, A.; Bahrami, M.; Karimipour, A.; Chau, K.W.; et al. Energetic Thermo-Physical Analysis of MLP-RBF Feed-Forward Neural Network Compared With RLS Fuzzy to Predict CuO/liquid Paraffin Mixture Properties. Eng. Appl. Comput. Fluid Mech. 2022, 16, 764–779. [Google Scholar] [CrossRef]
- Rizk-Allah, R.M.; Hassanien, A.E. COVID-19 forecasting based on an improved interior search algorithm and multilayer feed-forward neural network. In Medical Informatics and Bioimaging Using Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 2022; pp. 129–152. [Google Scholar]
- Werbos, P.J. The Roots of Backpropagation: From Ordered Derivatives to Neural Networks and Political Forecasting; John Wiley & Sons: Hoboken, NJ, USA, 1994; Volume 1. [Google Scholar]
- Malvić, T. Clastic facies prediction using neural network (case study from Okoli field). Nafta 2006, 57, 415–431. [Google Scholar]
- Robbins, H.; Monro, S. A stochastic approximation method. Ann. Math. Stat. 1951, 400–407. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Moré, J.J. The Levenberg-Marquardt algorithm: Implementation and theory. In Numerical Analysis; Springer: Berlin/Heidelberg, Germany, 1978; pp. 105–116. [Google Scholar]
- Jozanikohan, G.; Norouzi, G.H.; Sahabi, F.; Memarian, H.; Moshiri, B. The application of multilayer perceptron neural network in volume of clay estimation: Case study of Shurijeh gas reservoir, Northeastern Iran. J. Nat. Gas Sci. Eng. 2015, 22, 119–131. [Google Scholar] [CrossRef] [Green Version]
- Yi-de, M.; Qing, L.; Zhi-Bai, Q. Automated image segmentation using improved PCNN model based on cross-entropy. In Proceedings of the 2004 International Symposium on Intelligent Multimedia, Video and Speech Processing, Hong Kong, China, 20–22 October 2004; pp. 743–746. [Google Scholar]
- Pihur, V.; Datta, S.; Datta, S. Weighted rank aggregation of cluster validation measures: A monte carlo cross-entropy approach. Bioinformatics 2007, 23, 1607–1615. [Google Scholar] [CrossRef] [Green Version]
- Sudre, C.H.; Li, W.; Vercauteren, T.; Ourselin, S.; Jorge Cardoso, M. Generalised dice overlap as a deep learning loss function for highly unbalanced segmentations. In Deep Learning in Medical Image Analysis and Multimodal Learning for Clinical Decision Support; Springer: Berlin/Heidelberg, Germany, 2017; pp. 240–248. [Google Scholar]
- James, W.; Stein, C. Estimation with quadratic loss. In Breakthroughs in Statistics; Springer: Berlin/Heidelberg, Germany, 1992; pp. 443–460. [Google Scholar]
- Veeken, P.C.; Rauch-Davies, M. AVO attribute analysis and seismic reservoir characterization. First Break 2006, 24, 41–52. [Google Scholar] [CrossRef]
- Goodway, B.; Chen, T.; Downton, J. Improved AVO fluid detection and lithology discrimination using Lamé petrophysical parameters;“λ ρ”,“μ ρ”, & “λ/μ fluid stack”, from P and S inversions. In SEG Technical Program Expanded Abstracts 1997; Society of Exploration Geophysicists: Houston, TX, USA, 1997; pp. 183–186. [Google Scholar]
- Kleinbaum, D.G.; Klein, M. Analysis of matched data using logistic regression. In Logistic Regression: A Self-Learning Text; Springer: Berlin/Heidelberg, Germany, 2002; pp. 227–265. [Google Scholar]
- Stuart, A. Kendall’s advanced theory of statistics. Distrib. Theory 1994, 1, 128. [Google Scholar]
- Quinlan, J.R. Learning decision tree classifiers. ACM Comput. Surv. (CSUR) 1996, 28, 71–72. [Google Scholar] [CrossRef]
- Breiman, L.; Friedman, J.; Olshen, R.; Stone, C. Classification and Regression Trees; Wadsworth International Group: Belmont, CA, USA, 1984; Volume 37, pp. 237–251. [Google Scholar]
- Venkatasubramaniam, A.; Wolfson, J.; Mitchell, N.; Barnes, T.; JaKa, M.; French, S. Decision trees in epidemiological research. Emerg. Themes Epidemiol. 2017, 14, 11. [Google Scholar] [CrossRef] [PubMed]
- Strobl, C.; Malley, J.; Tutz, G. An introduction to recursive partitioning: Rationale, application, and characteristics of classification and regression trees, bagging, and random forests. Psychol. Methods 2009, 14, 323. [Google Scholar] [CrossRef] [Green Version]
- Merkle, E.C.; Shaffer, V.A. Binary recursive partitioning: Background, methods, and application to psychology. Br. J. Math. Stat. Psychol. 2011, 64, 161–181. [Google Scholar] [CrossRef]
- Therneau, T.; Atkinson, B.; Ripley, B.; Ripley, M.B. Package ‘rpart’. The Comprehensive R Archive Network (CRAN). 2019. Available online: https://cran.microsoft.com/snapshot/2020-04-20/web/packages/rpart/rpart.pdf (accessed on 7 June 2022).
- Almuallim, H. An efficient algorithm for optimal pruning of decision trees. Artif. Intell. 1996, 83, 347–362. [Google Scholar] [CrossRef] [Green Version]
- Sondergeld, C.H.; Rai, C.S. Elastic anisotropy of shales. Lead. Edge 2011, 30, 324–331. [Google Scholar] [CrossRef]
- Berryman, J.G. Exact seismic velocities for transversely isotropic media and extended Thomsen formulas for stronger anisotropies. Geophysics 2008, 73, D1–D10. [Google Scholar] [CrossRef]
- Vernik, L.; Fisher, D.; Bahret, S. Estimation of net-to-gross from P and S impedance in deepwater turbidites. Lead. Edge 2002, 21, 380–387. [Google Scholar] [CrossRef]
- Ma, X.Q. Global joint inversion for the estimation of acoustic and shear impedances from AVO derived P-and S-wave reflectivity data. First Break 2001, 19, 557–566. [Google Scholar]
- Wrona, T.; Pan, I.; Gawthorpe, R.L.; Fossen, H. Seismic facies analysis using machine learning. Geophysics 2018, 83, O83–O95. [Google Scholar] [CrossRef]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
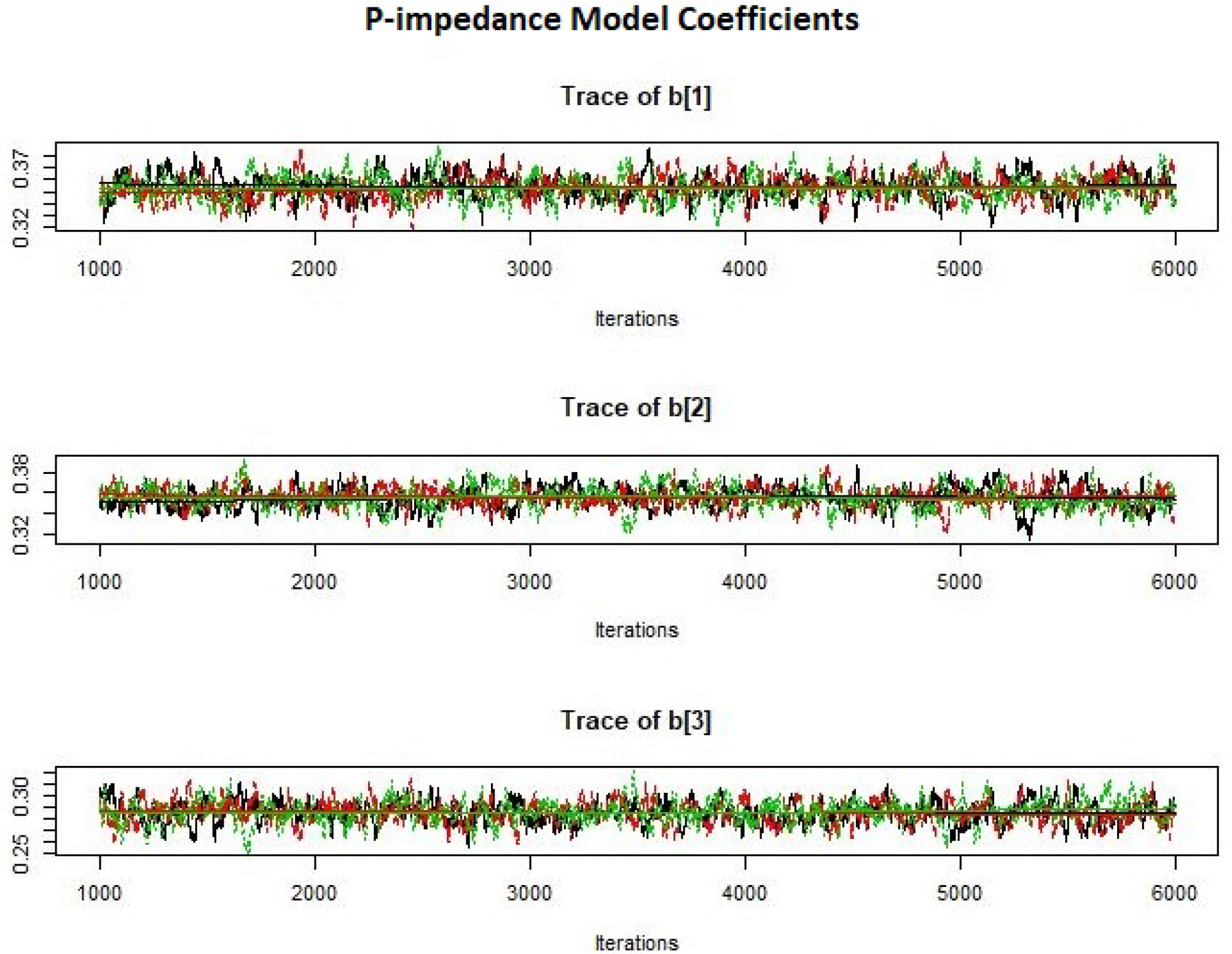
| Coefficient | ||||||
|---|---|---|---|---|---|---|
| Property | Mu | SD | Mu | SD | Mu | SD |
| Model | 0.3532 | 0.01 | 0.3555 | 0.01 | 0.286 | 0.01 |
| Model | 0.3672 | 0.01 | 0.364 | 0.01 | 0.266 | 0.01 |
| Property | Isotropic Inversion | Statistical Modeling | MLFN |
|---|---|---|---|
| 84% | 88% | 94% | |
| 73% | 85% | 92% |
| Method | Gas Sand | Wet Sand | Shale | All Facies |
|---|---|---|---|---|
| Isotropic Inversion | 51% | 82% | 55% | 56% |
| MLFN | 97% | 83% | 73% | 77% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gouda, M.F.; Abdul Latiff, A.H.; Moussavi Alashloo, S.Y. Estimation of Litho-Fluid Facies Distribution from Zero-Offset Acoustic and Shear Impedances. Appl. Sci. 2022, 12, 7754. https://doi.org/10.3390/app12157754
Gouda MF, Abdul Latiff AH, Moussavi Alashloo SY. Estimation of Litho-Fluid Facies Distribution from Zero-Offset Acoustic and Shear Impedances. Applied Sciences. 2022; 12(15):7754. https://doi.org/10.3390/app12157754
Chicago/Turabian StyleGouda, Mohammed Fathy, Abdul Halim Abdul Latiff, and Seyed Yasser Moussavi Alashloo. 2022. "Estimation of Litho-Fluid Facies Distribution from Zero-Offset Acoustic and Shear Impedances" Applied Sciences 12, no. 15: 7754. https://doi.org/10.3390/app12157754
APA StyleGouda, M. F., Abdul Latiff, A. H., & Moussavi Alashloo, S. Y. (2022). Estimation of Litho-Fluid Facies Distribution from Zero-Offset Acoustic and Shear Impedances. Applied Sciences, 12(15), 7754. https://doi.org/10.3390/app12157754