
Seismic Velocity Anomalies Detection Based on a Modified U-Net Framework

Abstract
:1. Introduction
2. Materials and Methods
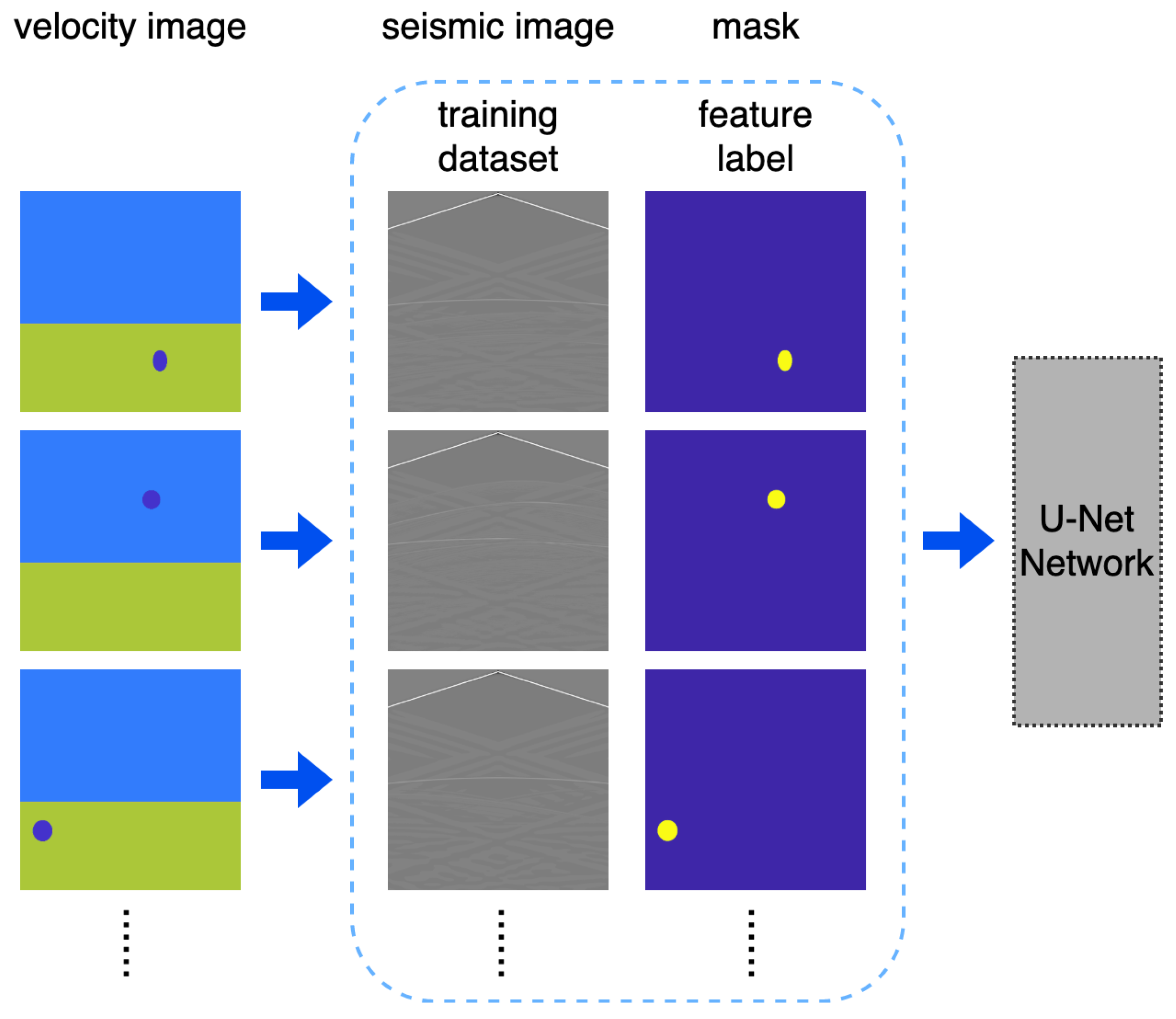
2.1. Seismic Data Preparation
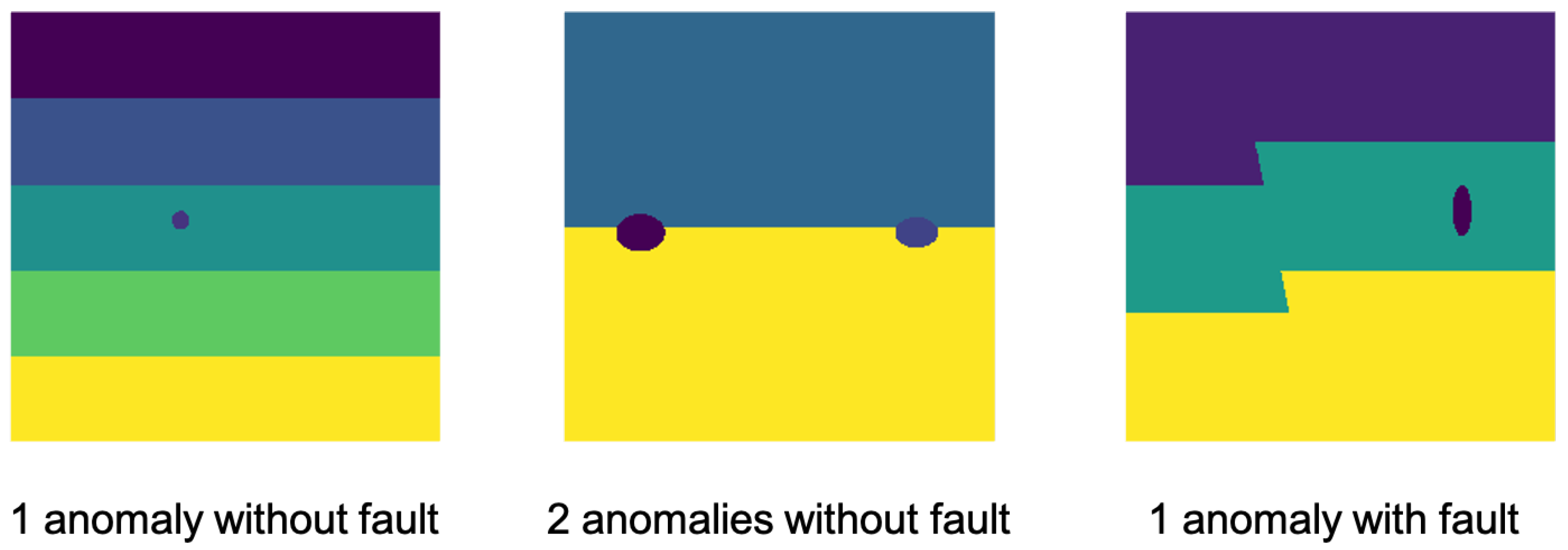
- Background velocity can be simple layered model or including faults.
- Anomalies are simplified to some elliptical regions, with random center coordinates and major/minor axis length.
- Masks for the designed anomalies are generated simultaneously.
- At most, two anomalies are located in each model, either inside one layer or crossing multiple layers.
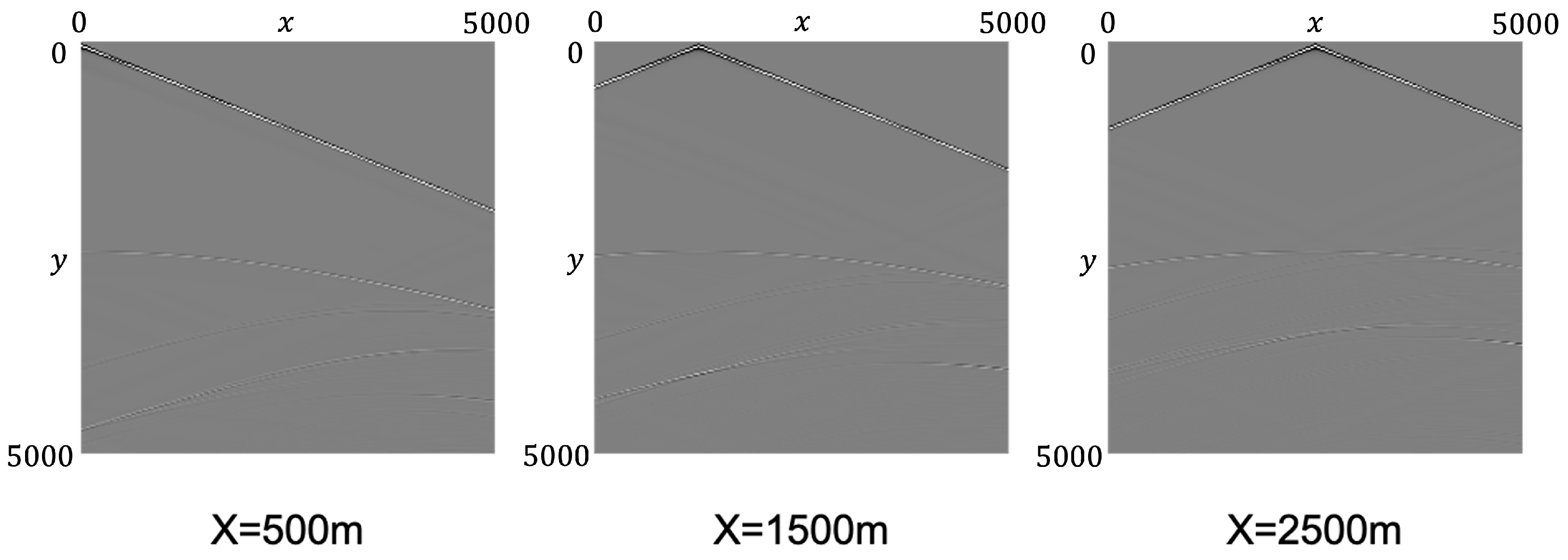
- Seismic data generated by different shots are recorded.
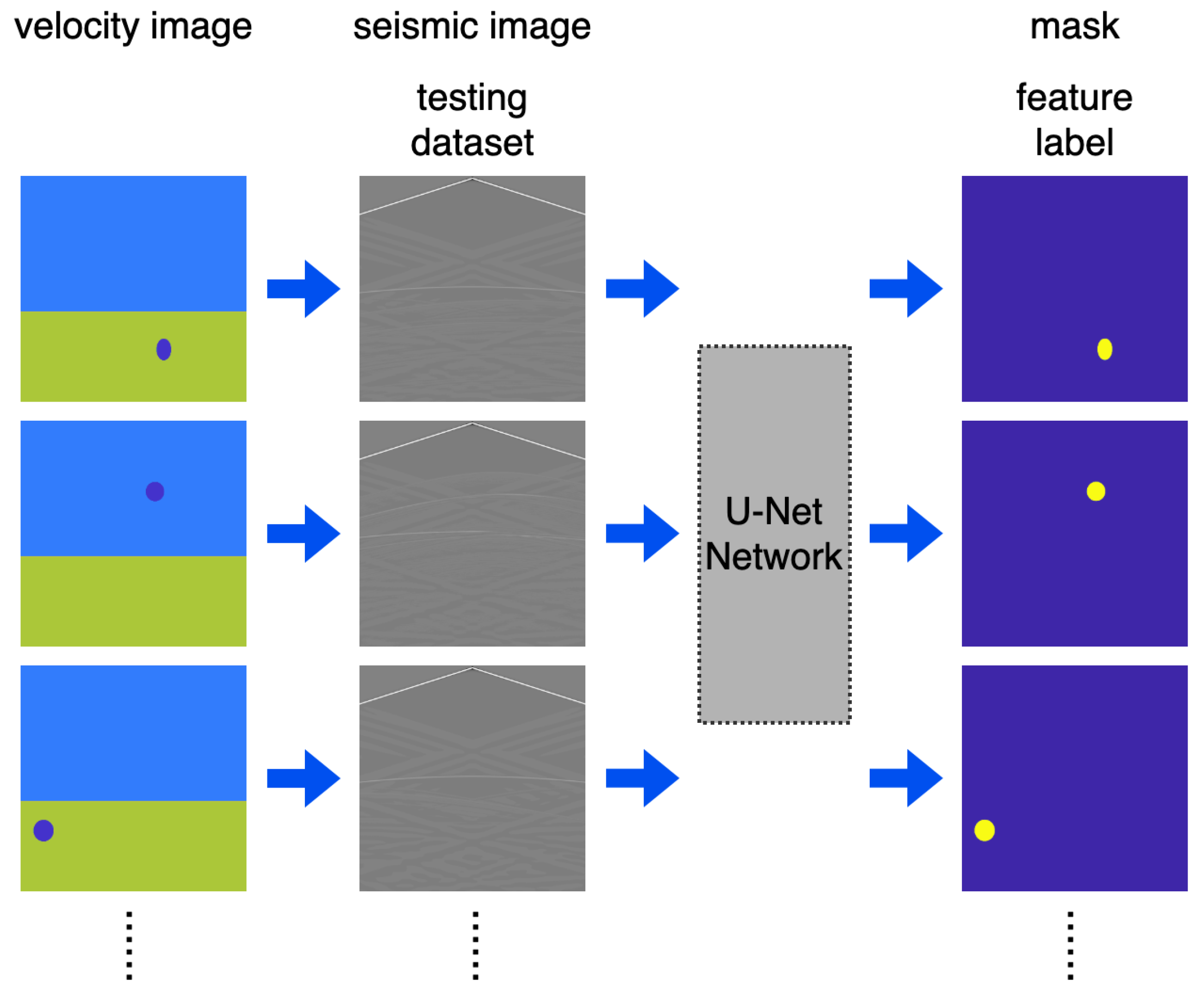
- All the data are separated into two parts for training and testing.
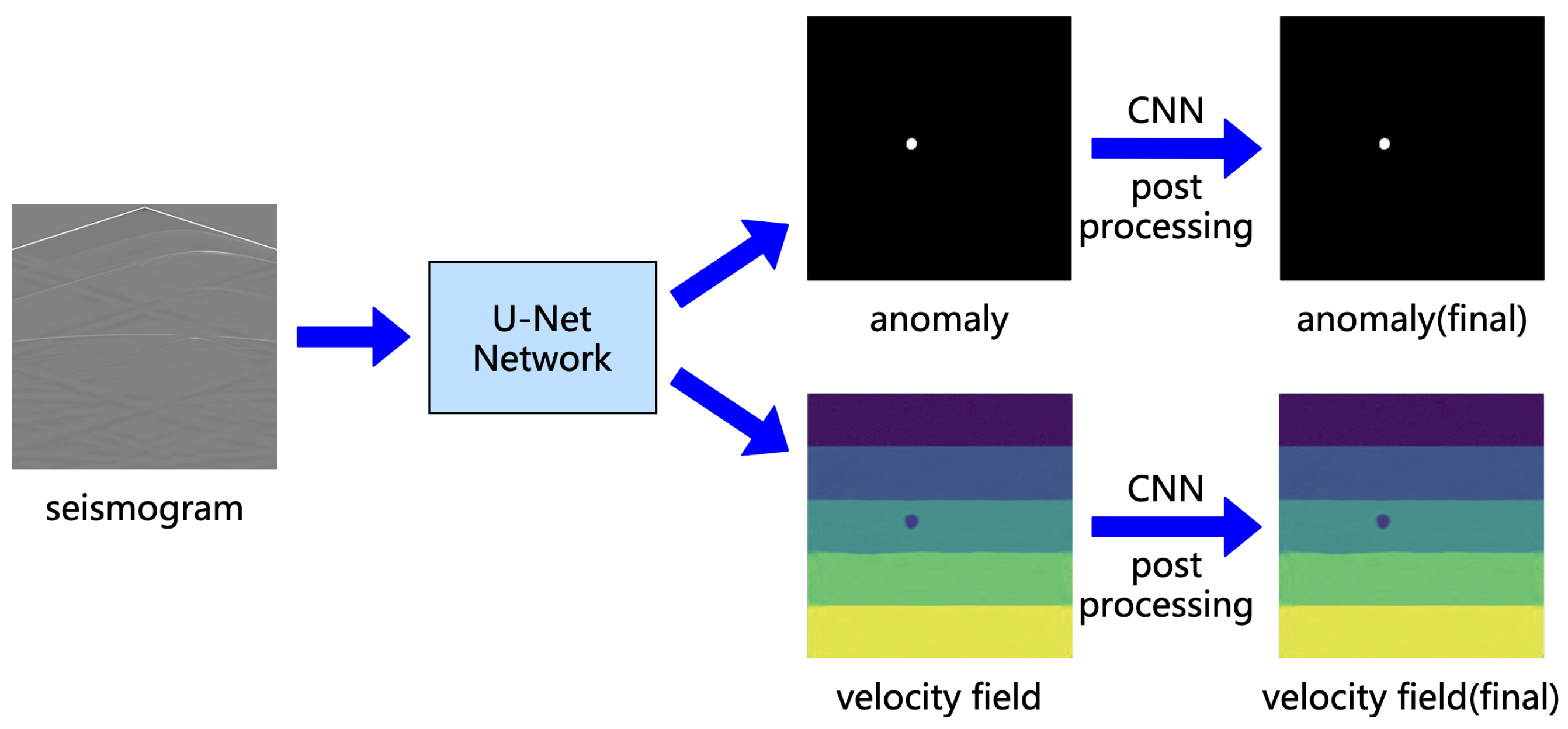
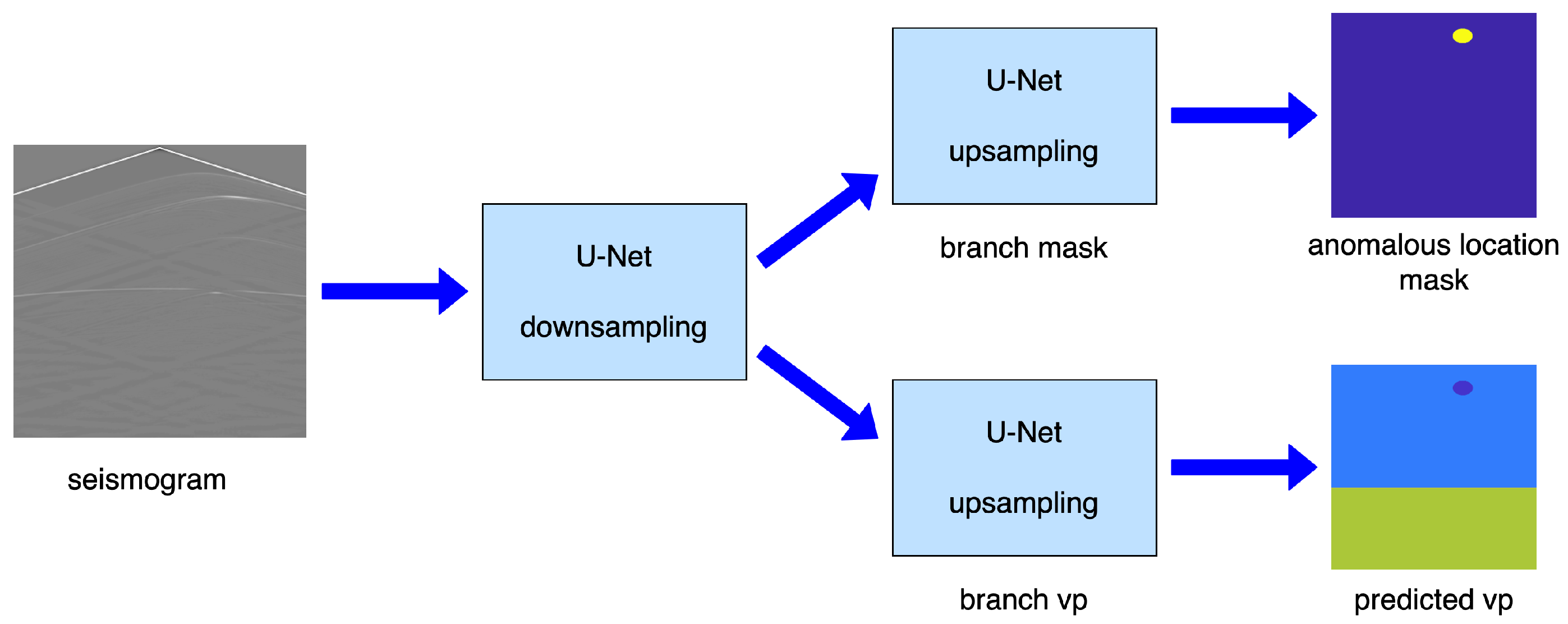
2.2. Flow Chart
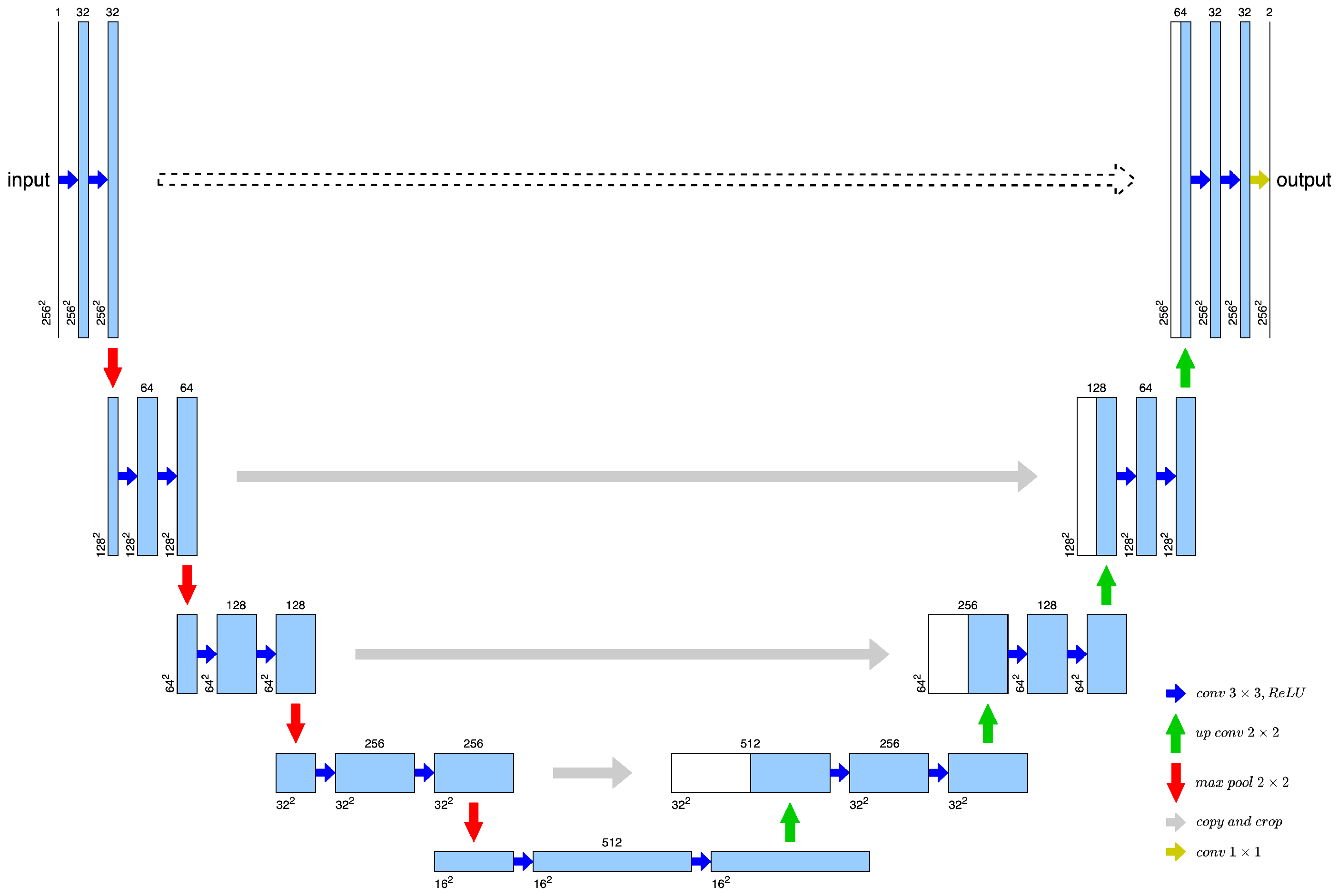
2.3. Modified U-Net Neuron Network
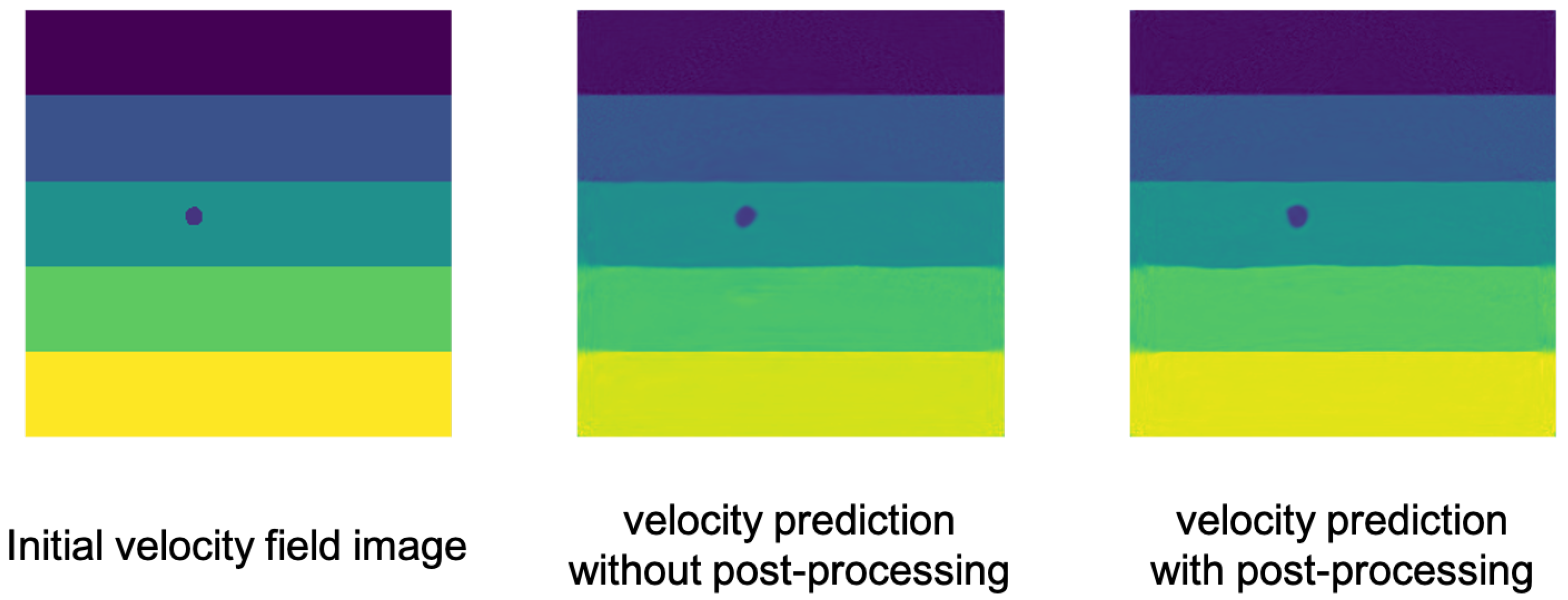
2.4. Post-Processing
3. Results
3.1. Velocity Models with Anomalies
3.2. Seismic Waveforms
3.3. Results
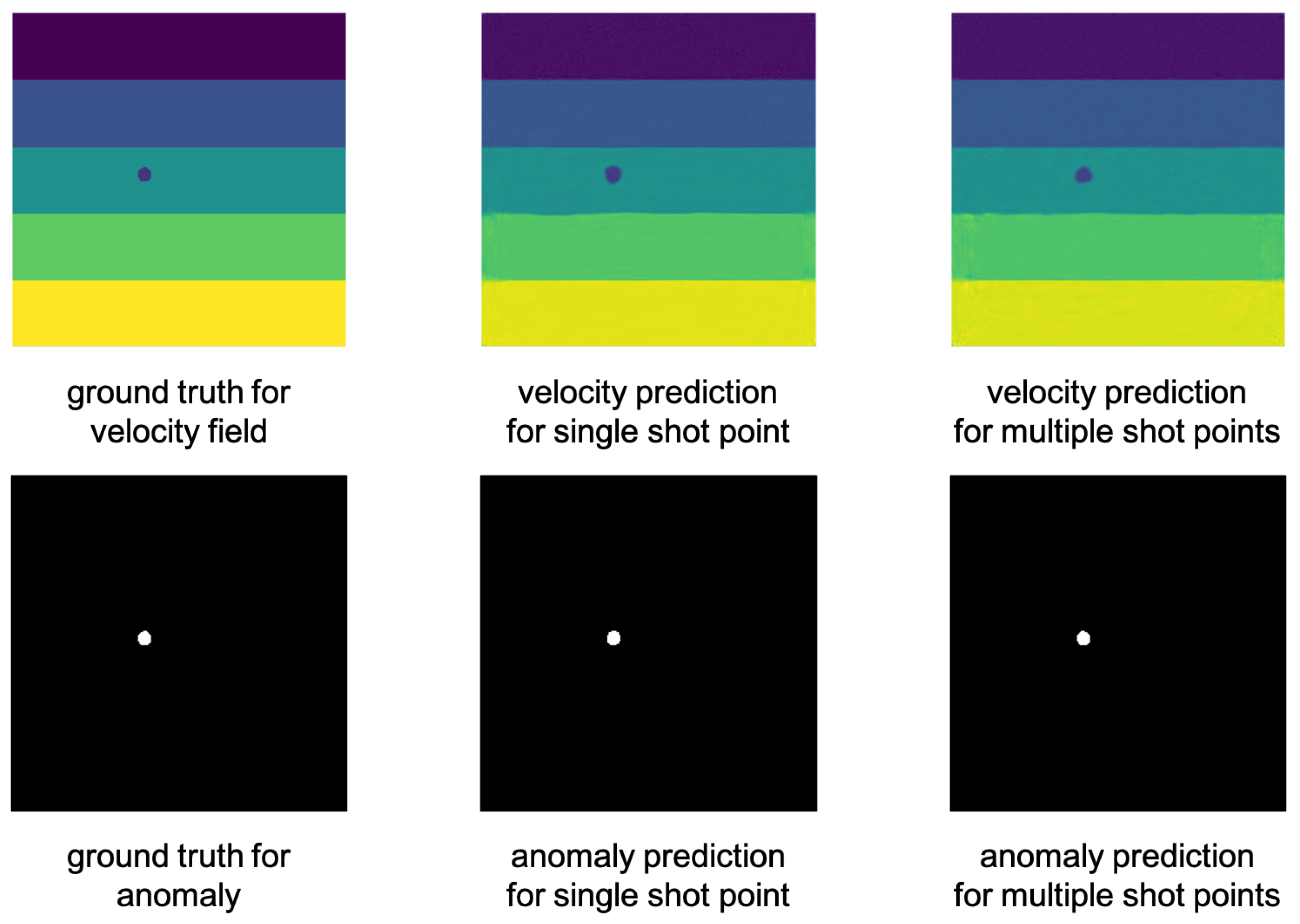
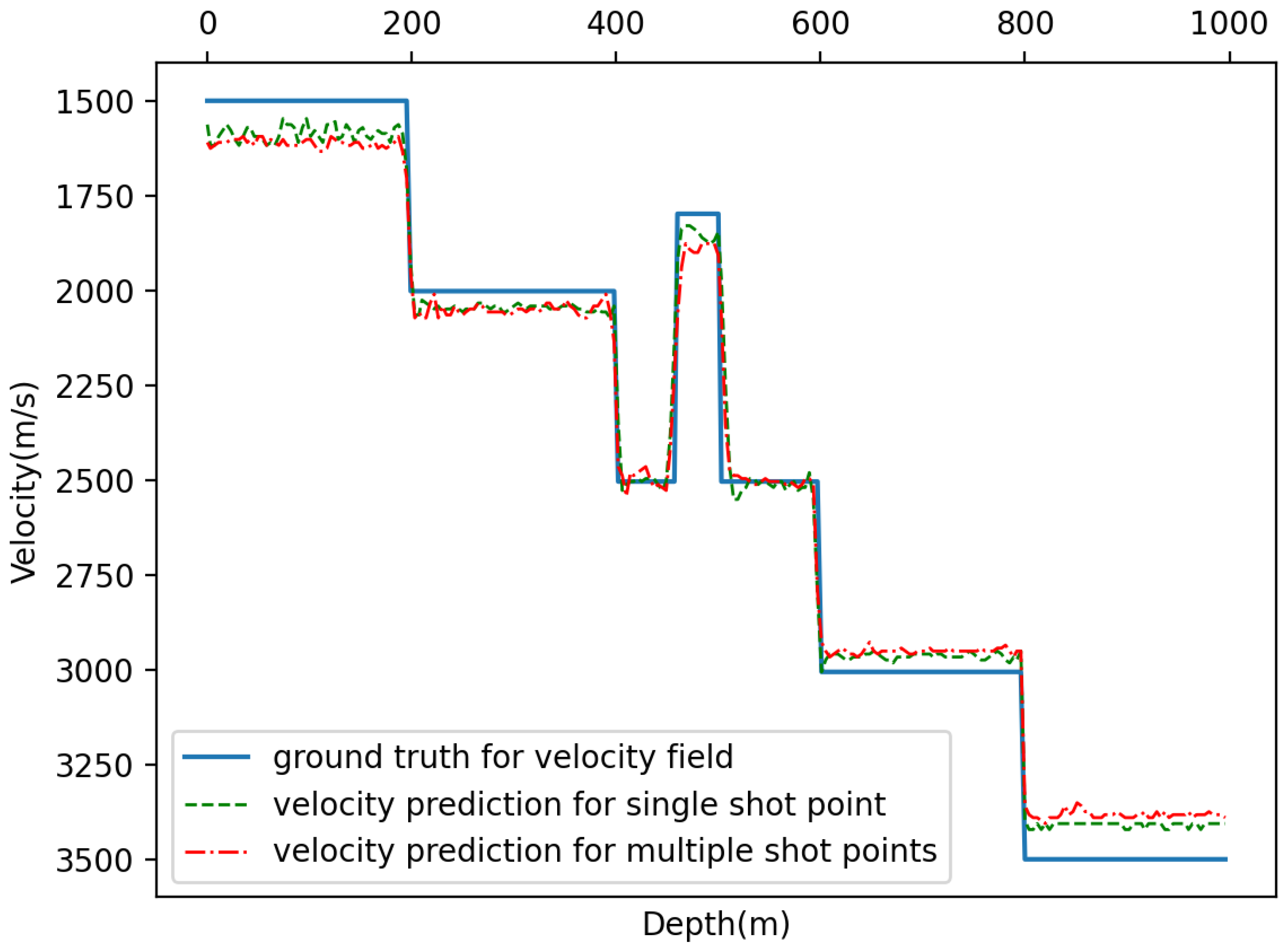
3.3.1. One Anomaly without Fault
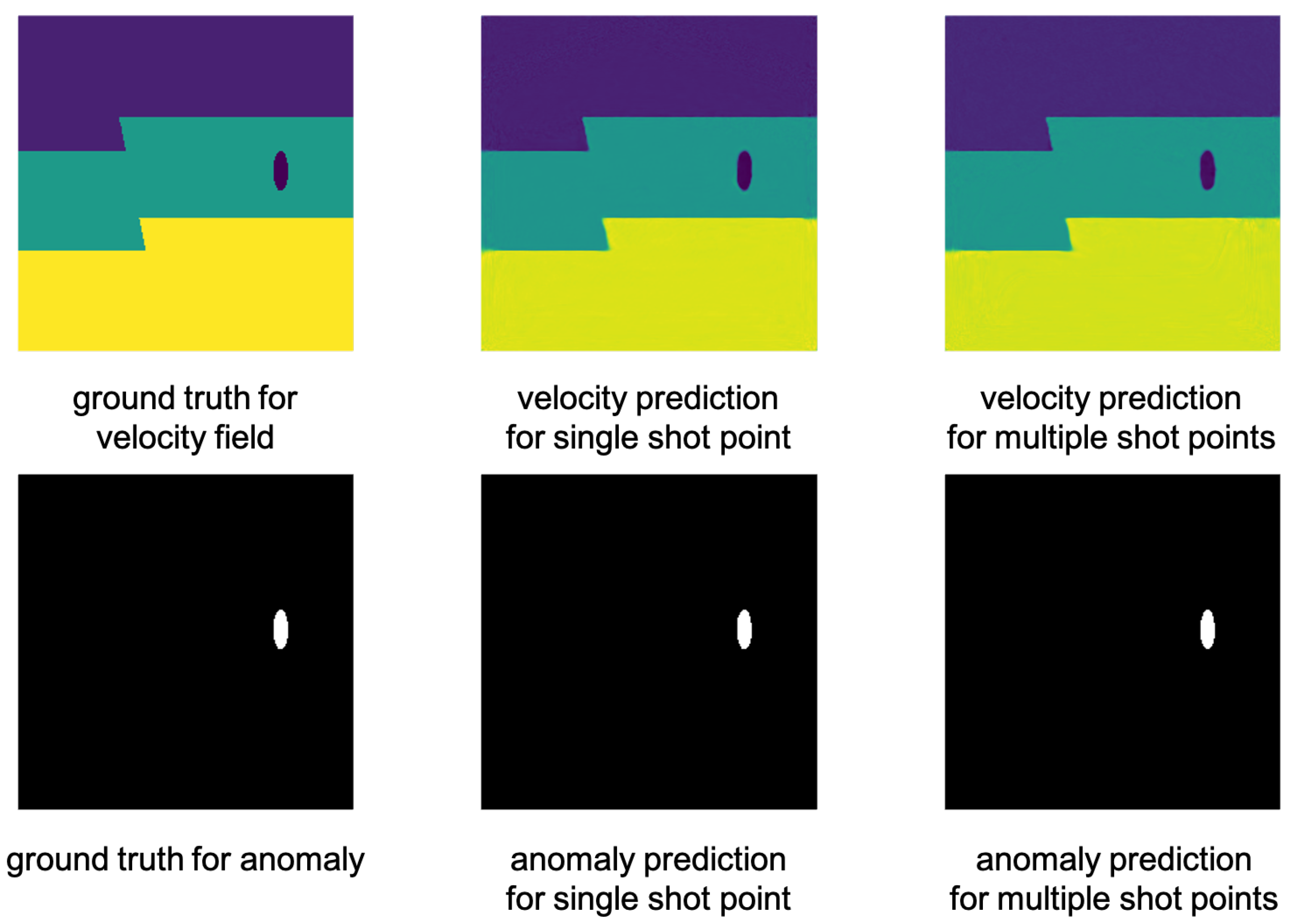
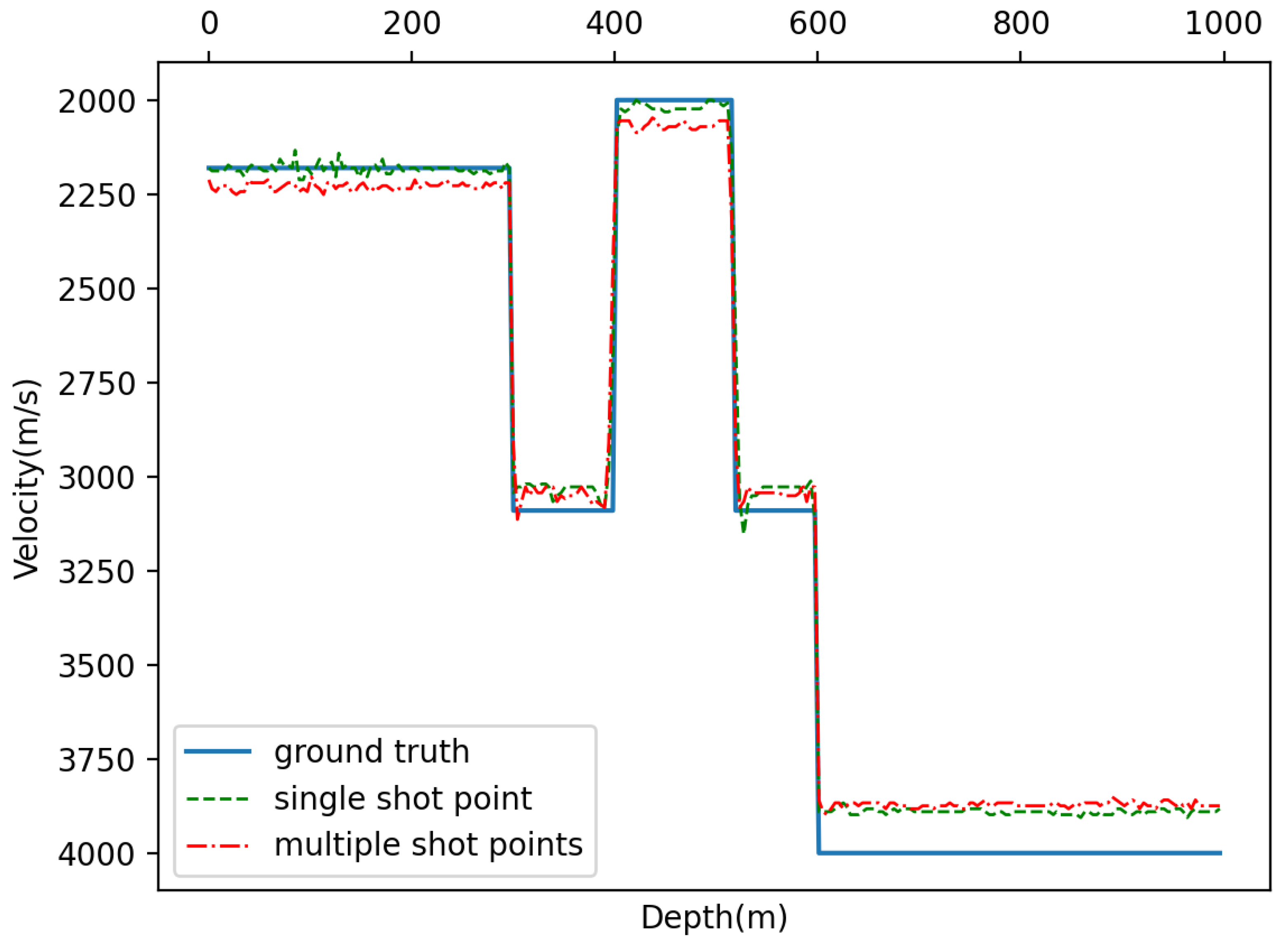
3.3.2. One Anomaly with Fault
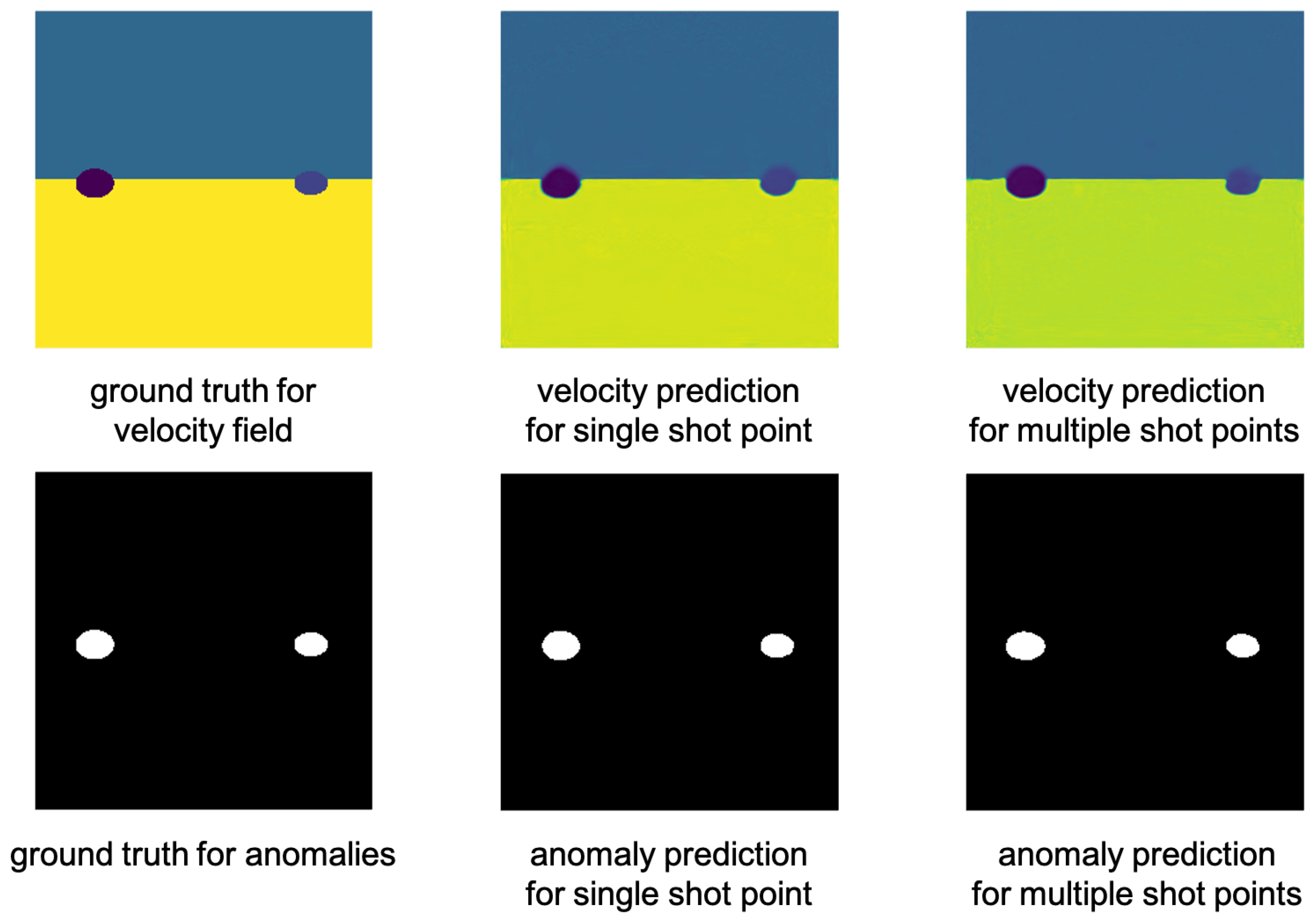
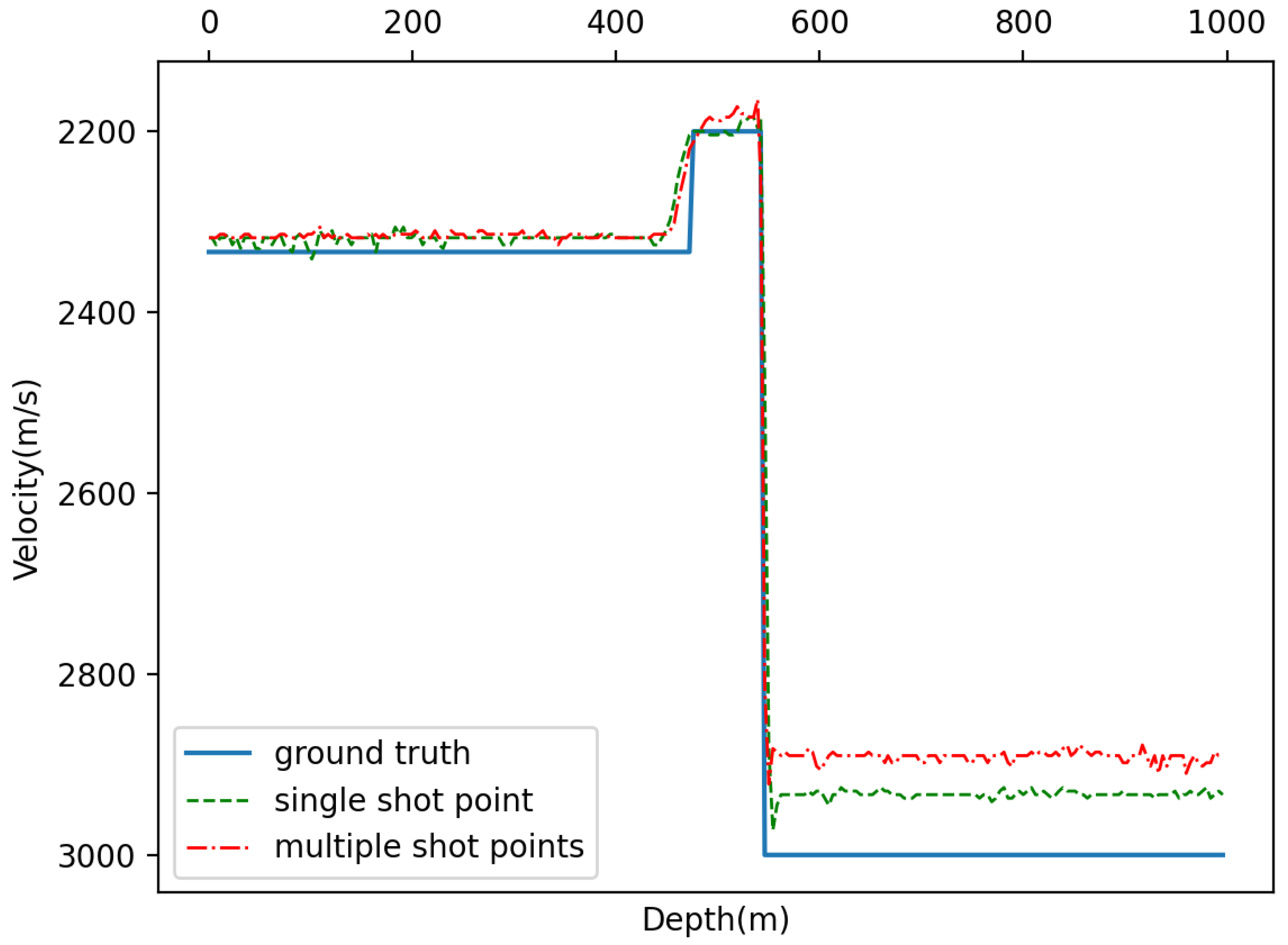
3.3.3. Multiple Anomaly without Fault
4. Discussions and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rointan, A.; Soleimani Monfared, M.; Aghajani, H. Improvement of seismic velocity model by selective removal of irrelevant velocity variations. Acta Geod. Geophys. 2021, 56, 145–176. [Google Scholar] [CrossRef]
- Shahbazi, A.; Ghosh, D.; Soleimani, M.; Gerami, A. Seismic imaging of complex structures with the CO-CDS stack method. Stud. Geophys. Geod. 2016, 60, 662–678. [Google Scholar] [CrossRef]
- Bouchaala, F.; Guennou, C. Estimation of viscoelastic attenuation of real seismic data by use of ray tracing software: Application to the detection of gas hydrates and free gas. Comptes Rendus Geosci. 2012, 344, 57–66. [Google Scholar] [CrossRef]
- Xin, K.; Hung, B. 3-D tomographic Q inversion for compensating frequency dependent attenuation and dispersion. In SEG Technical Program Expanded Abstracts; Society of Exploration Geophysicists: Houston, TX, USA, 2009; pp. 4014–4018. [Google Scholar]
- Zhou, J.; Birdus, S.; Hung, B.; Teng, K.H.; Xie, Y.; Chagalov, D.; Cheang, A.; Wellen, D.; Garrity, J. Compensating attenuation due to shallow gas through Q tomography and Q-PSDM, a case study in Brazil. In SEG Technical Program Expanded Abstracts; Society of Exploration Geophysicists: Houston, TX, USA, 2011; pp. 3332–3336. [Google Scholar]
- Zhou, J.; Wu, X.; Teng, K.H.; Xie, Y.; Lefeuvre, F.; Anstey, I.; Sirgue, L. FWI-guided Q tomography and Q-PSDM for imaging in the presence of complex gas clouds, a case study from offshore Malaysia. In SEG Technical Program Expanded Abstracts 2013; Society of Exploration Geophysicists: Houston, TX, USA, 2013; pp. 4765–4769. [Google Scholar]
- Zhang, Z.; Jia, J.; Fu, G.; Zhang, H.; Chow, D.; Hung, B.; Anstey, I.; Lai, W.L. Fullband Imaging. 2016. Available online: https://archives.datapages.com/data/petroleum-exploration-society-of-australia/news/140/140001/pdfs/52.htm (accessed on 12 July 2022).
- Matsushima, J.; Ali, M.Y.; Bouchaala, F. A novel method for separating intrinsic and scattering attenuation for zero-offset vertical seismic profiling data. Geophys. J. Int. 2017, 211, 1655–1668. [Google Scholar] [CrossRef]
- Hinton, G.E. Deep belief networks. Scholarpedia 2009, 4, 5947. [Google Scholar] [CrossRef]
- Guillen, P.; Larrazabal, G.; González, G.; Boumber, D.; Vilalta, R. Supervised learning to detect salt body. In SEG Technical Program Expanded Abstracts; Society of Exploration Geophysicists: Houston, TX, USA, 2015; pp. 1826–1829. [Google Scholar]
- Guillen, P.; Larrazabal, G.; Gonzalez, G.; Sineva, D. Detecting salt body using texture classification. In Proceedings of the 14th International Congress of the Brazilian Geophysical Society & EXPOGEF, Rio de Janeiro, Brazil, 3–6 August 2015; Society of Exploration Geophysicists: Houston, TX, USA, 2015; pp. 1155–1159. [Google Scholar]
- Hastie, T.; Tibshirani, R.; Friedman, J. The Elements of Statistical Learning: Data Mining, Inference, and Prediction; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Zhang, C.; Frogner, C.; Araya-Polo, M.; Hohl, D. Machine-learning based automated fault detection in seismic traces. In Proceedings of the 76th EAGE Conference and Exhibition, Amsterdam, The Netherlands, 16–19 June 2014; Volume 2014, pp. 1–5. [Google Scholar]
- Cohen, I.; Coult, N.; Vassiliou, A.A. Detection and extraction of fault surfaces in 3D seismic data. Geophysics 2006, 71, P21–P27. [Google Scholar] [CrossRef] [Green Version]
- Hale, D. Methods to compute fault images, extract fault surfaces, and estimate fault throws from 3D seismic images. Geophysics 2013, 78, O33–O43. [Google Scholar] [CrossRef]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In International Conference on Medical Image Computing and Computer-Assisted Intervention; Springer: Berlin/Heidelberg, Germany, 2015; pp. 234–241. [Google Scholar]
- Artru, J.; Farges, T.; Lognonné, P. Acoustic waves generated from seismic surface waves: Propagation properties determined from Doppler sounding observations and normal-mode modelling. Geophys. J. Int. 2004, 158, 1067–1077. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment | Time of Training | Time of Prediction |
|---|---|---|
| Single shot point | 95.3 h | 5 min |
| Multiple shot points | 109.3 h | 5 min |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Jia, J.; Lu, Z.; Jiao, J.; Yu, P. Seismic Velocity Anomalies Detection Based on a Modified U-Net Framework. Appl. Sci. 2022, 12, 7225. https://doi.org/10.3390/app12147225
Li Z, Jia J, Lu Z, Jiao J, Yu P. Seismic Velocity Anomalies Detection Based on a Modified U-Net Framework. Applied Sciences. 2022; 12(14):7225. https://doi.org/10.3390/app12147225
Chicago/Turabian StyleLi, Ziqian, Jiwei Jia, Zheng Lu, Jian Jiao, and Ping Yu. 2022. "Seismic Velocity Anomalies Detection Based on a Modified U-Net Framework" Applied Sciences 12, no. 14: 7225. https://doi.org/10.3390/app12147225
APA StyleLi, Z., Jia, J., Lu, Z., Jiao, J., & Yu, P. (2022). Seismic Velocity Anomalies Detection Based on a Modified U-Net Framework. Applied Sciences, 12(14), 7225. https://doi.org/10.3390/app12147225