

Estimation and Reliability Research of Post-Earthquake Traffic Travel Time Distribution Based on Floating Car Data


Abstract
:1. Introduction
2. Data Processing and Track Information Extraction of Floating Vehicle
2.1. Floating Car Data Characteristics and Preprocessing
| Algorithm 1. FCM algorithm. |
| Begin Setting template function precision ε, fuzzy index m and maximum iteration number Tm. Initializing a fuzzy clustering center zi. Repeat Update the fuzzy partition matrix U = {μij} and the cluster center z = {ZC}. t ← t + 1 Until (|J(t) − J(t − 1)| < ε OR c > Tm) The result of pixel classification is obtained from the obtained U = {μij}. Make use of cluster center zi to fill the vacancy. End |
2.2. Definition of Basic Parameters of Floating Car Method
2.3. Information Extraction of Trajectory Data
3. Estimation and Reliability Calculation of Road Travel Time Distribution after Earthquake
3.1. Road Vulnerability Analysis
3.2. Impact Factors of Earthquake Damage of Path Travel Time
3.2.1. Evaluation of Road Accessibility after Earthquake
3.2.2. Calculation of Earthquake Damage Influencing Factors
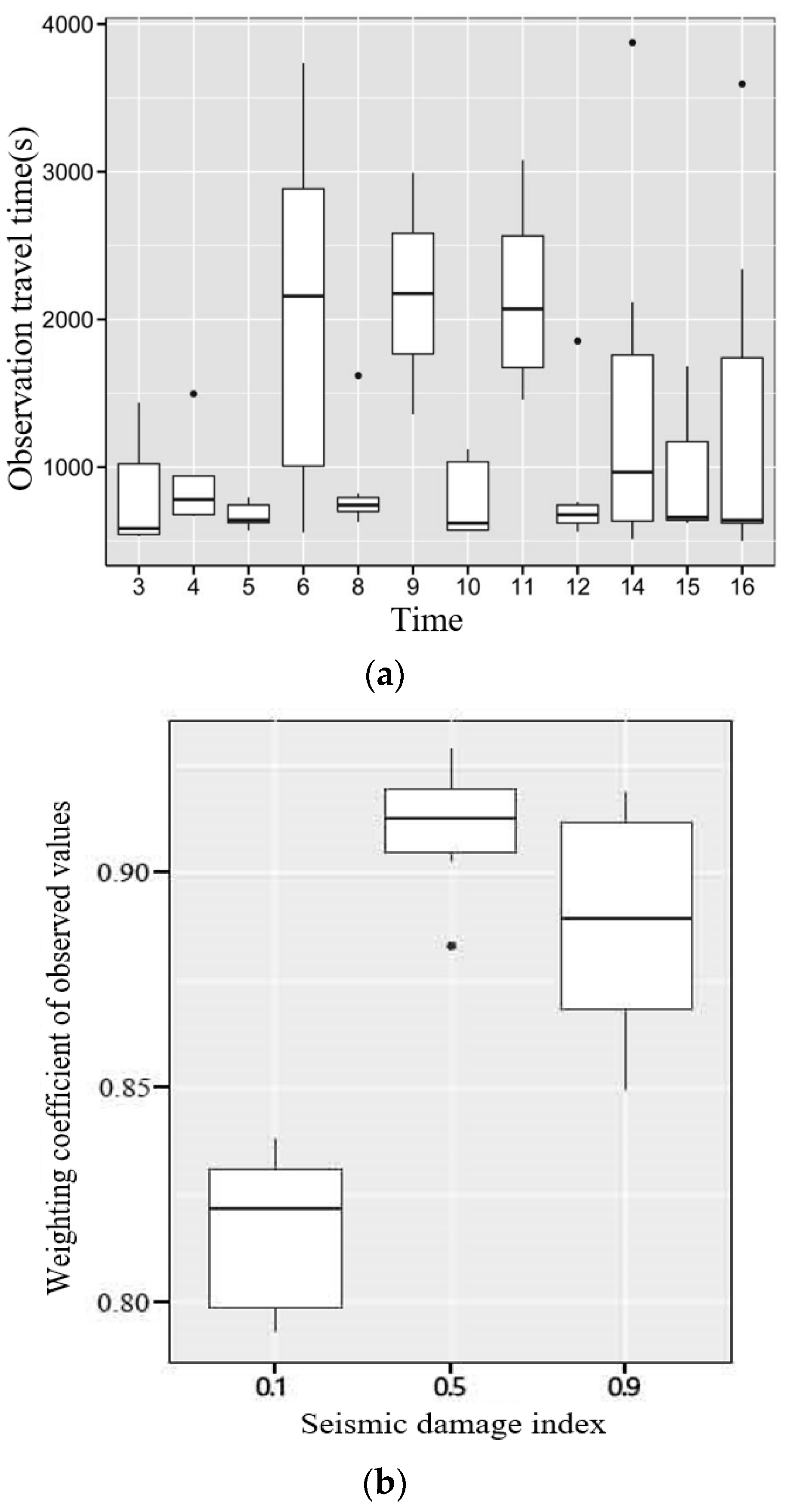
3.2.3. Weight of Observation Values
3.2.4. Statistical Eigenvalue Calculation
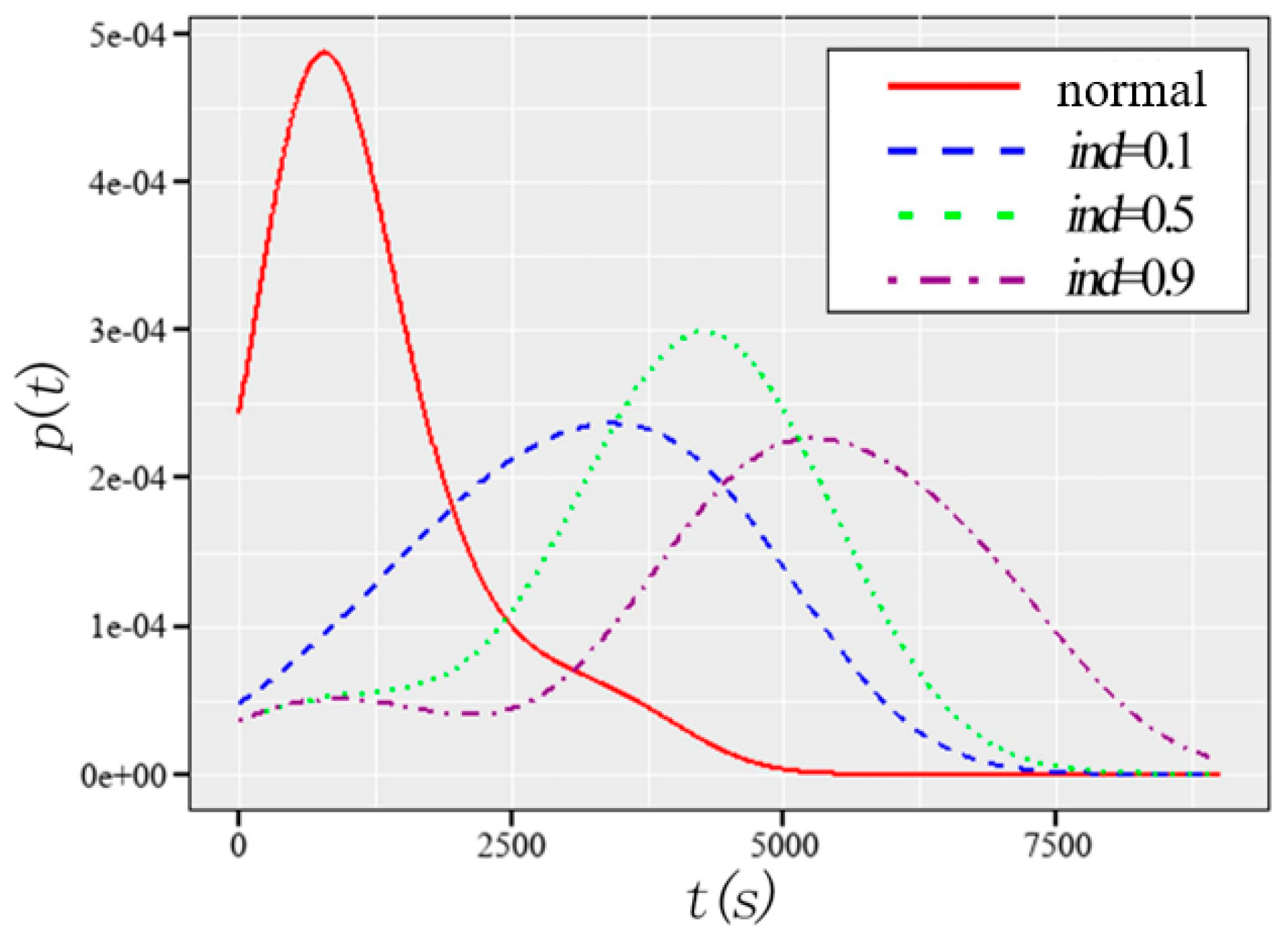
3.3. Estimation of Travel Time Distribution after Earthquake
4. Analysis of Examples
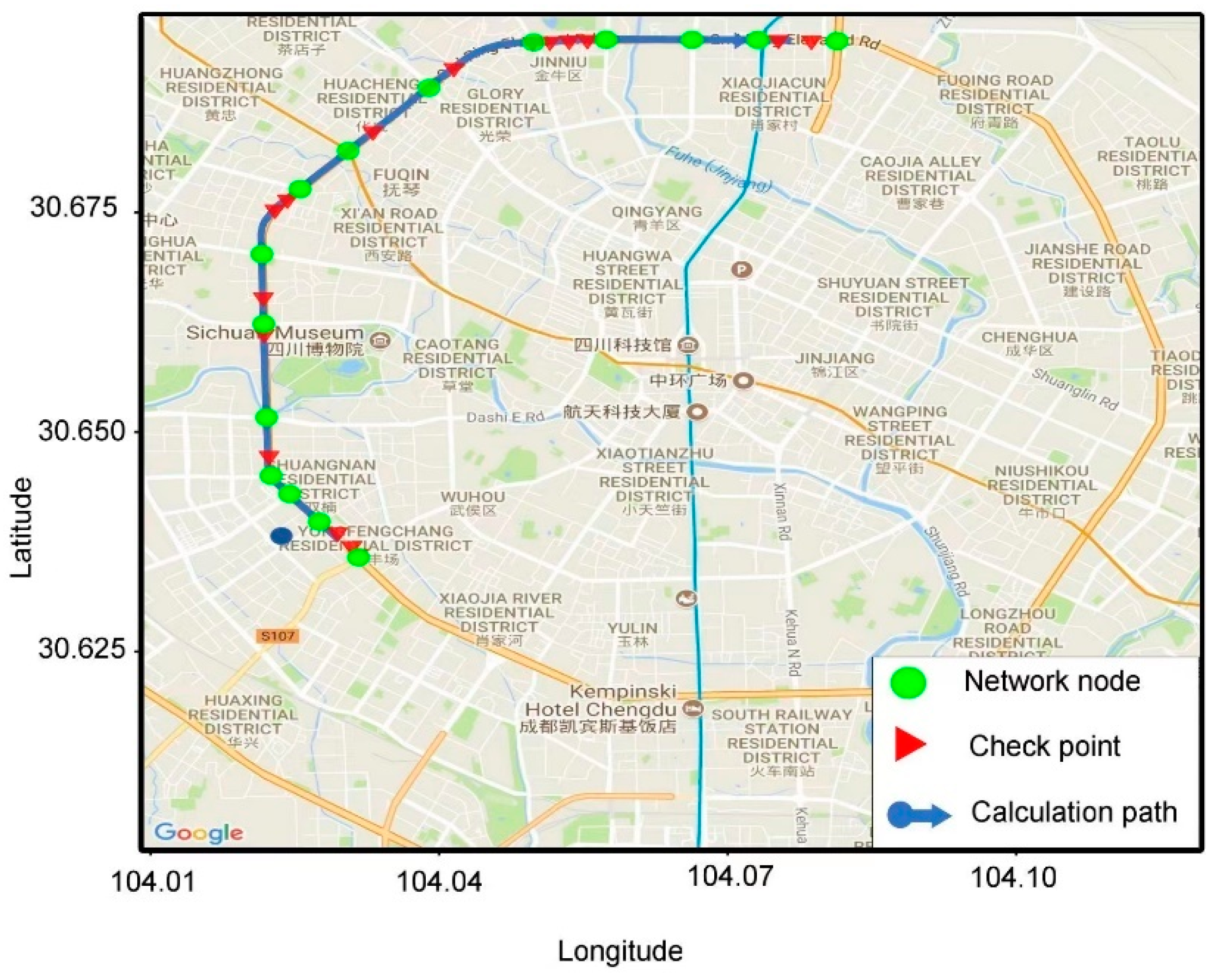
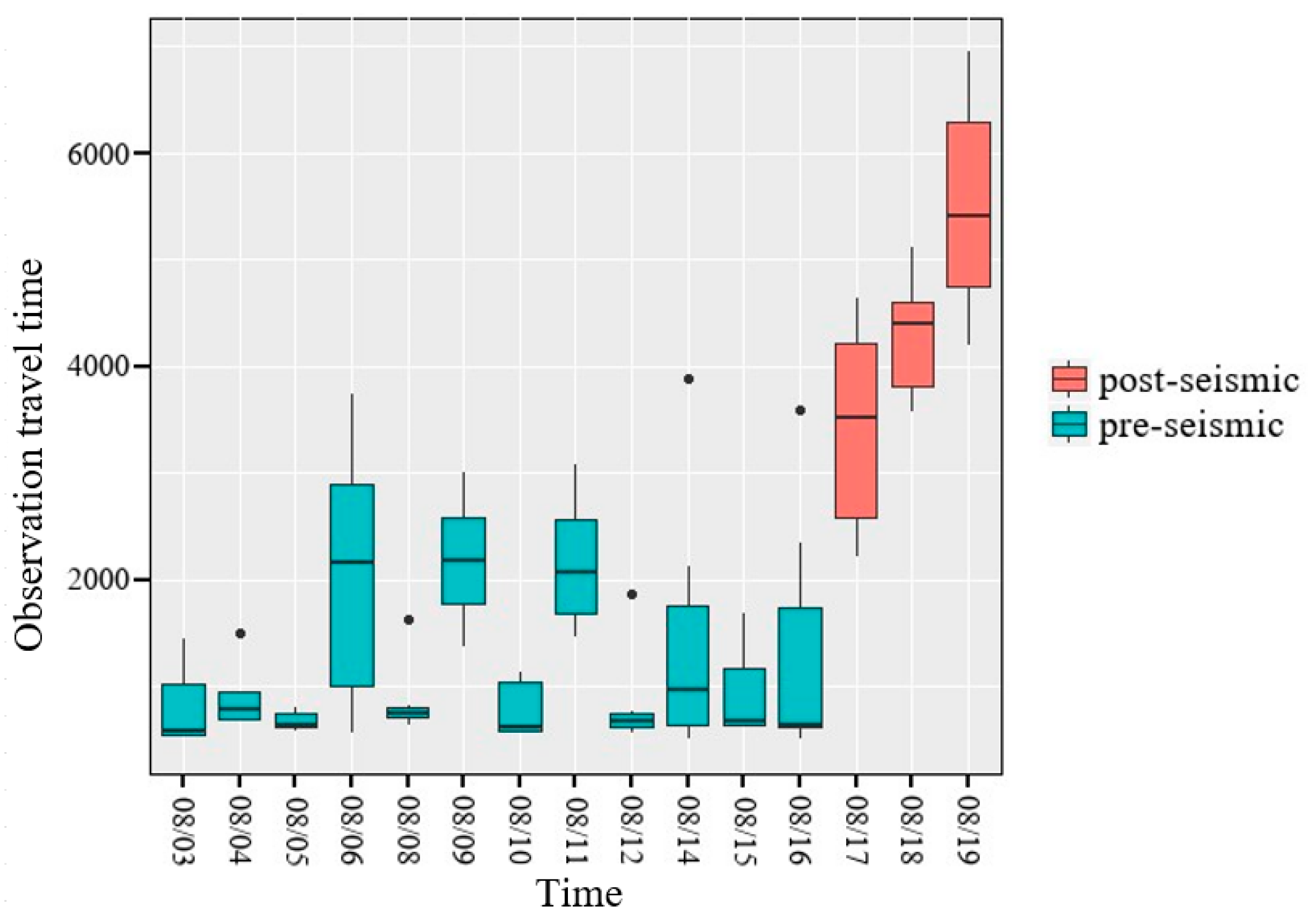
4.1. Data Acquisition
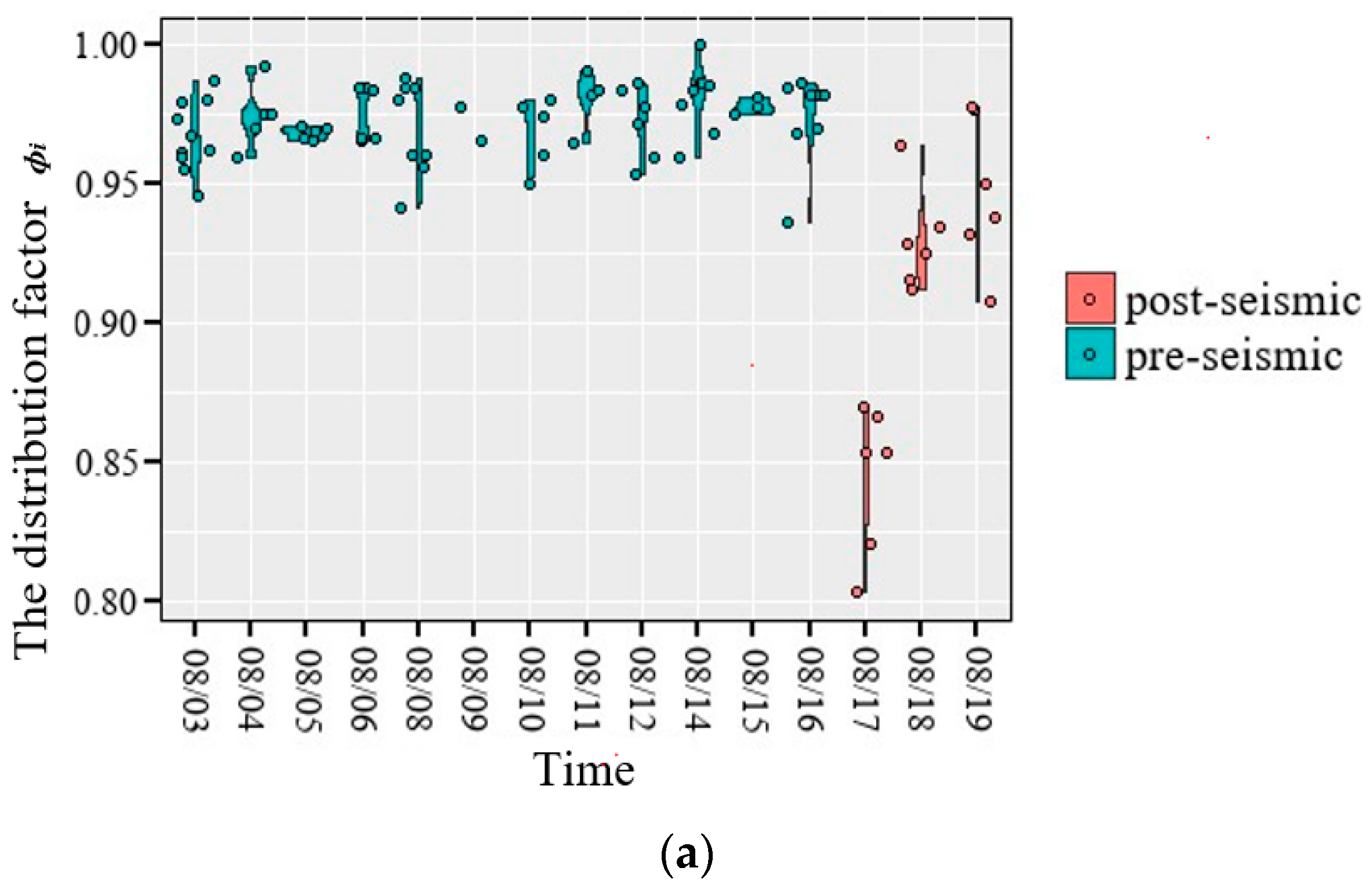
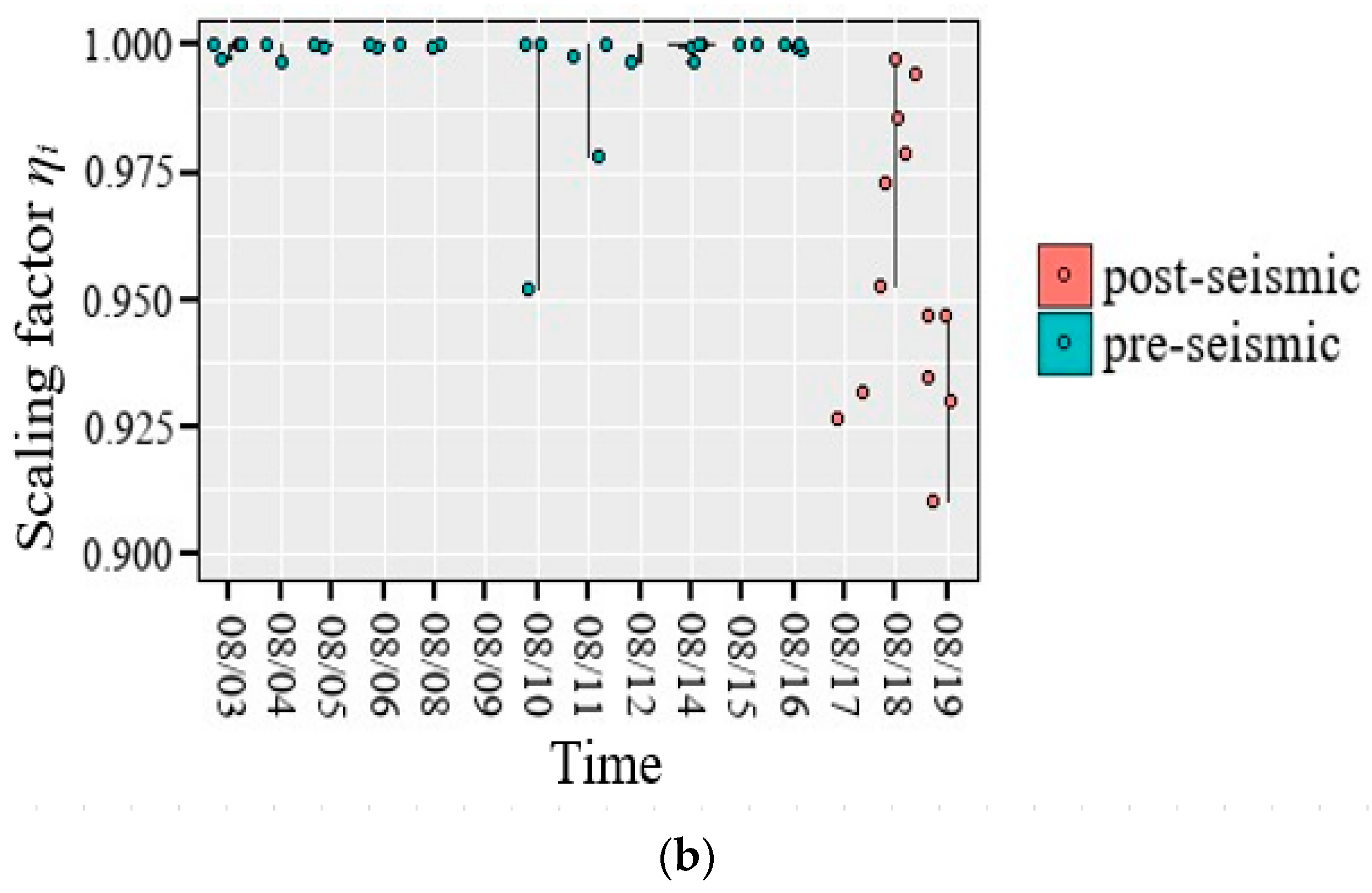
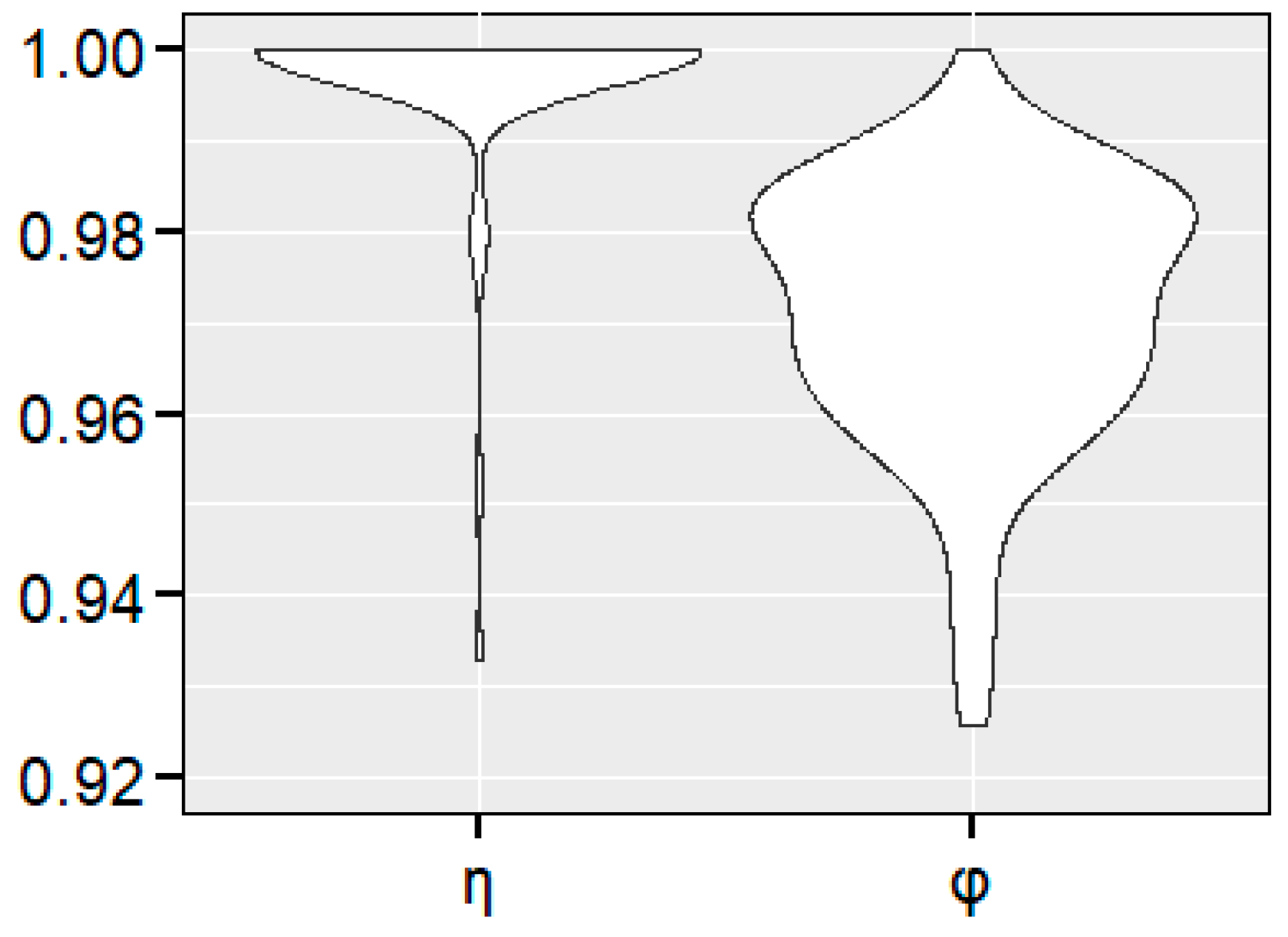
4.2. Calculation of Distribution Factor and Scaling Factor
4.3. Weight Calculation
4.4. Estimation of Probability Density Function
4.5. Path Travel Time Reliability Analysis
5. Conclusions and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. Main Symbol Table

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Meaning |
|---|---|
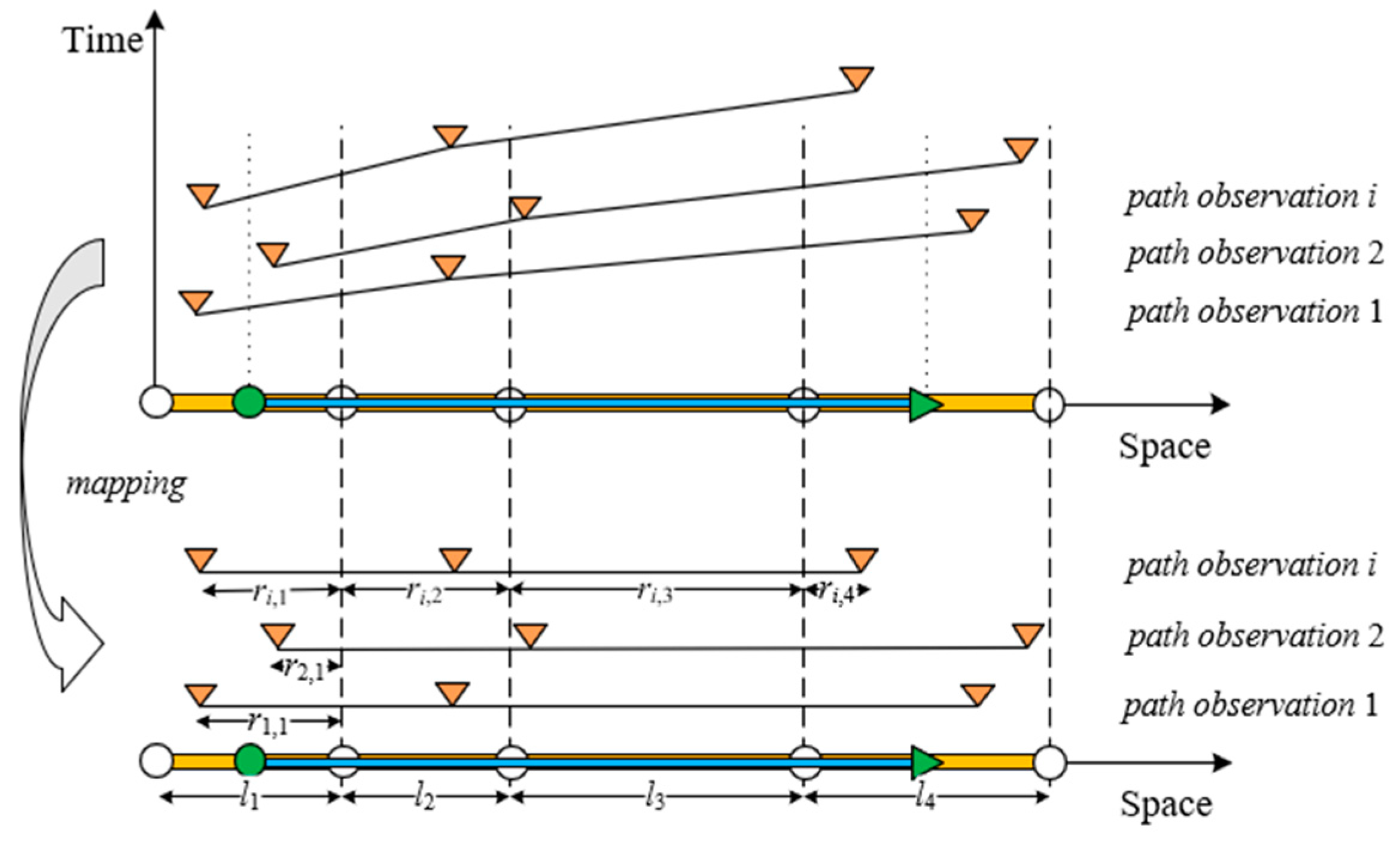
| aik | Coverage length of path section k |
| rik | The length of the floating track to the road section k |
| lk | The length of the road section k |
| αik | Coverage degree of path section k |
| ρik | Coverage degree of floating track on road section k |
| βik | The coverage degree of overlapping path to road section k is the minimum value of αik and ρik. |
| τi | Travel time of the i-th trajectory observation |
| Τ′i | Under the i-th trajectory observation, the calculated travel time of the coincident path |
| Distribution factor under the i-th trajectory observation | |
| ηi | Scaling factor under i-th trajectory observation |
| Ti | Estimated travel time of target path under the i-th trajectory observation |
| t0 ik | Estimated travel time of road section k under the i-th trajectory observation |
| s′i | The estimated time point of the floating car’s entry path under the i-th trajectory observation |
| ωi | Weighting coefficient of observation value under the i-th trajectory observation |
| vi | Influencing factors of incomplete path coverage under the i-th trajectory observation |
| λi | Influencing factors of road ergodic non-uniformity under i-th Trajectory Observation |
| p(t) | Probability density of path travel time distribution in normal state |
| ppost(t) | Probability density of path travel time distribution after earthquake |
Appendix A.2. The Number Code
References
- Chang, S.E.; Nojima, N. Measuring post-disaster transportation system performance: The 1995 Kobe earthquake in comparative perspective. Transp. Res. Part A Policy Pract. 2001, 35, 475–494. [Google Scholar] [CrossRef]
- El-Anwar, O.; Ye, J.; Orabi, W. Efficient Optimization of Post-Disaster Reconstruction of Transportation Networks. J. Comput. Civ. Eng. 2016, 30, 0887–3801. [Google Scholar] [CrossRef]
- Naranjo, J.E.; Alonso, F.J.; Serradilla, F.; Zato, J.G. Floating Car Data Augmentation Based on Infrastructure Sensors and Neural Networks. IEEE Trans. Intell. Transp. Syst. 2012, 13, 107–114. [Google Scholar] [CrossRef]
- Kong, X.J.; Xia, F.; Ning, Z.; Rahim, A.; Cai, Y.; Gao, Z.; Ma, J. Mobility Dataset Generation for Vehicular Social Networks Based on Floating Car Data. In IEEE Transactions on Vehicular Technology; IEEE: Piscataway, NJ, USA, 2018; Volume 67, pp. 3874–3886. [Google Scholar]
- Shi, Q.; Abdel-Aty, M. Big data applications in real-time traffic operation and safety monitoring and improvement on urban expressways. Transp. Res. Part C Emerg. Technol. 2015, 58, 380–394. [Google Scholar] [CrossRef]
- Ygnace, J.L.; Drane, C. Cellular telecommunication and transportation convergence: A case study of a research conducted in California and in France on cellular positioning techniques and transportation issues. In Proceedings of the 2001 IEEE Intelligent Transportation Systems, Oakland, CA, USA, 25–29 August 2001. [Google Scholar]
- Wang, L.; Wang, C.; Zhang, H.; Fan, Y. Research on Urban Dynamic Traffic Information Collection and Processing Method Based on Floating Car. In Proceedings of the First China Intelligent Transportation Annual Conference, Shanghai, China, June 2005. [Google Scholar]
- Schäfer, R.P.; Thiessenhusen, K.U.; Brockfeld, E.; Wagner, P. A traffic information system by means of real-time floating-car data. In Proceedings of the ITS World Congress. DLR, Chicago, IL, USA, 11–14 October 2002. [Google Scholar]
- Kerner, B.S.; Demir, C.; Herrtwich, R.G.; Klenov, S.L.; Rehborn, H.; Aleksic, M.; Haug, A. Traffic state detection with floating car data in road networks. In Proceedings of the 2005 IEEE Intelligent Transportation Systems, Vienna, Austria, 16 September 2005. [Google Scholar]
- Messelodi, S.; Modena, C.M.; Zanin, M.; De Natale, F.G.; Granelli, F.; Betterle, E.; Guarise, A. Intelligent extended floating car data collection. Expert Syst. Appl. 2009, 36, 4213–4227. [Google Scholar] [CrossRef]
- Jian, S.; Ying, Z.; Chun, Z. OD travel time prediction method based on driver’s route choice preference. J. Traffic Transp. Eng. 2016, 16, 143–149. [Google Scholar]
- Zhang, F.; Zhu, X.; Guo, W.; Hu, T. Sparse Link Travel Time Estimation Using Big Data of Floating Car. Geomat. Inf. Sci. Wuhan Univ. 2017, 42, 56–62. [Google Scholar]
- Zheng, Y.; Zhu, X.; Zhang, F.; Guo, W.; Zhang, D.; Zeng, C. Road Travel Time Estimation Based on Road Network Similarity. Appl. Res. Comput. 2018, 35, 1681–1685. [Google Scholar]
- Wang, Y.; Zheng, Y.; Xue, Y. Travel Time Estimation of a Path using Sparse Trajectories. In Proceedings of the 20th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining (KDD), New York, NY, USA, 24–27 August 2014. [Google Scholar]
- Qiu, J.; Du, L.; Zhang, D.; Su, S.; Tian, Z. Nei-TTE: Intelligent Traffic Time Estimation Based on Fine-Grained Time Derivation of Road Segments for Smart City. In IEEE Transactions on Industrial Informatics; IEEE: Piscataway, NJ, USA, 2020; Volume 16, pp. 2659–2666. [Google Scholar]
- Jenelius, E.; Koutsopoulos, H.N. Travel time estimation for urban road networks using low frequency probe vehicle data. Transp. Res. Part B-Methodol. 2013, 53, 64–81. [Google Scholar] [CrossRef]
- Ma, Z.; Koutsopoulos, H.N.; Ferreira, L.; Mesbah, M. Estimation of trip travel time distribution using a generalized Markov chain approach. Transp. Res. Part C 2017, 71, 1–21. [Google Scholar] [CrossRef]
- Shi, C.; Chen, B.Y.; Li, Q. Estimation of Travel Time Distributions in Urban Road Networks Using Low-Frequency Floating Car Data. ISPRS Int. J. Geo-Inf. 2017, 6, 253. [Google Scholar] [CrossRef]
- Contreras, D.; Blaschke, T.; Kienberger, S.; Zeil, P. Spatial connectivity as a recovery process indicator: The L’Aquila earthquake. Technol. Forecast. Soc. Chang. 2013, 80, 1782–1803. [Google Scholar] [CrossRef]
- Khademi, N.; Balaei, B.; Shahri, M.; Mirzaei, M.; Sarrafi, B.; Zahabiun, M.; Mohaymany, A.S. Transportation network vulnerability analysis for the case of a catastrophic earthquake. Int. J. Disaster Risk Reduct. 2015, 12, 234–254. [Google Scholar] [CrossRef]
- Akbari, V.; Salman, F.S. Multi-vehicle synchronized arc routing problem to restore post-disaster network connectivity. Eur. J. Oper. Res. 2017, 257, 625–640. [Google Scholar] [CrossRef]
- Fang, K.; Fan, J.; Yu, B. A trip-based network travel risk: Definition and prediction. Ann. Oper. Res. 2022. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, Y.; Chen, P.; He, Z.; Yu, G. Probe data-driven travel time forecasting for urban expressways by matching similar spatiotemporal traffic patterns. Transp. Res. Part C Emerg. Technol. 2017, 85, 476–493. [Google Scholar] [CrossRef]
- Shen, X.; Yang, B. Reliability prediction model of arrival time of road emergency rescue after earthquake. Value Eng. 2016, 35, 184–186. [Google Scholar]
- Hou, B.; Li, X.; Han, Q.; Liu, A.; Lan, R. Connectivity and Travel Time Analysis of Highway Network after Earthquake Based on Monte Carlo Simulation. China J. Highw. Transp. 2017, 30, 287–296. [Google Scholar]
- Fan, J.; Wu, C. New Interpretation and Application of Membership Degree in FCM Algorithm. Acta Electron. Sin. 2004, 350–352. [Google Scholar]
- Xue, X.; Yang, H.; Ren, N. Travel Time Reliability of Regional Road Network under Emergency Conditions. J. Transp. Inf. Saf. 2019, 37, 25–32. [Google Scholar]
- Zhang, Y.; Yin, X.; Mo, Y.; Lin, Y. Research on Survivability of Urban Bus Network Considering Trip Time Reliability. Appl. Res. Comput. 2020, 37, 34–36+40. [Google Scholar]
- Rahmani, M.; Jenelius, E.; Koutsopoulos, H.N. Non-parametric estimation of route travel time distributions from low-frequency floating car data. Transp. Res. Part C Emerg. Technol. 2015, 58, 343–362. [Google Scholar] [CrossRef]
- Li, Y. Model and Method of Earthquake Emergency Decision of Transportation System; Institute of Engineering Mechanics, China Earthquake Administration: Harbin, China, 2014.
- Bäcklin, C.L.; Andersson, C.; Gustafsson, M.G. Self-tuning density estimation based on Bayesian averaging of adaptive kernel density estimations yields state-of-the-art performance. Pattern Recognit. 2018, 78, 133–143. [Google Scholar] [CrossRef]













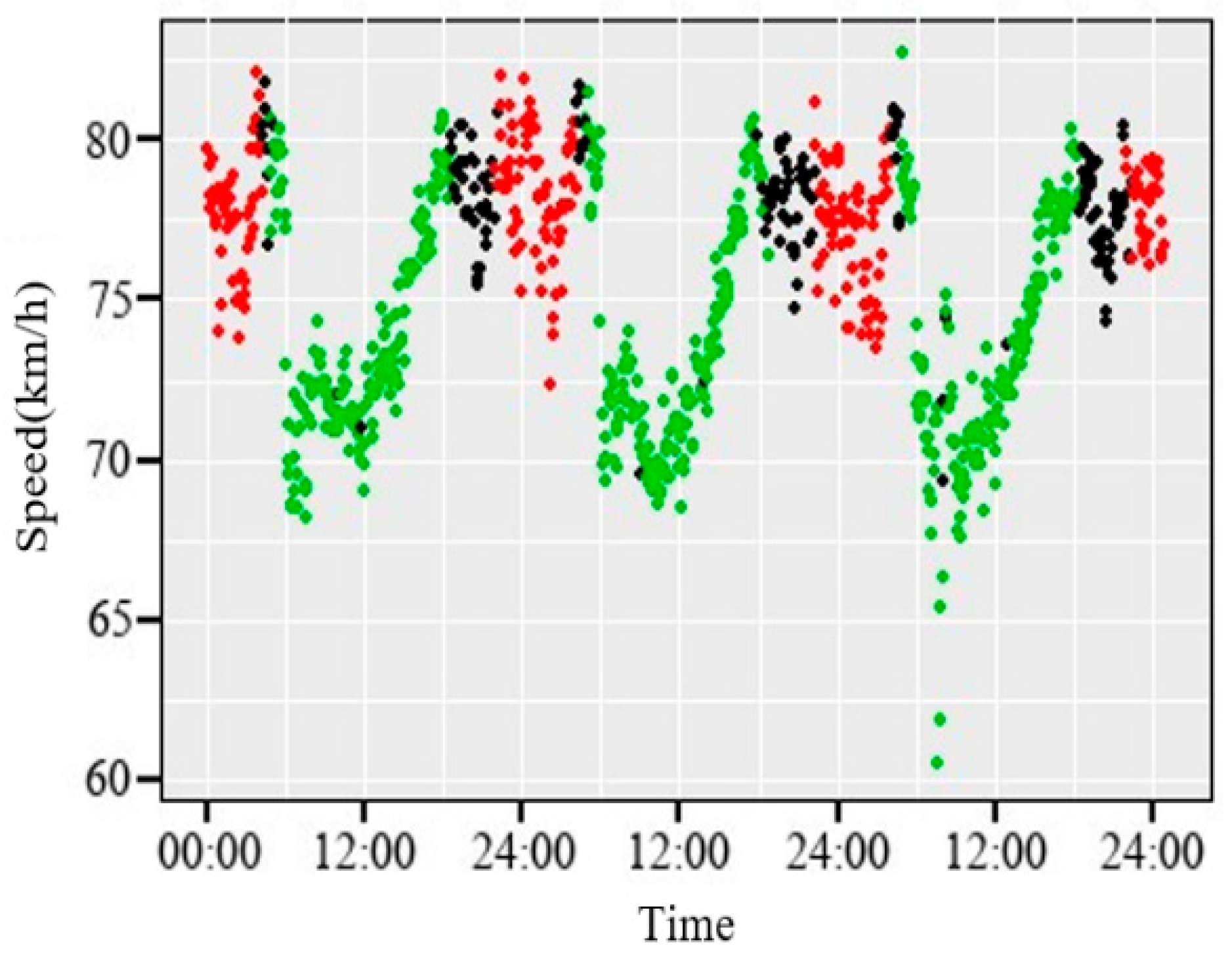
| Category | Mean Velocity |
|---|---|
| green | 72.556 |
| carmine | 77.182 |
| red | 77.616 |
| Vehicle ID | Start Time of Floating Car Track | End Time of Floating Car Track | The Trajectory Observation Travel Time is Ti/Second | Average Earthquake Damage Index ind |
|---|---|---|---|---|
| 2801 | 17 August 2014 07:41 | 17 August 2014 8:55 | 4429 | 0.1 |
| 2802 | 17 August 2014 08:04 | 17 August 2014 8:41 | 2210 | 0.1 |
| 2803 | 17 August 2014 08:00 | 17 August 2014 9:00 | 3601 | 0.1 |
| 2804 | 17 August 2014 07:43 | 17 August 2014 8:39 | 3412 | 0.1 |
| 2805 | 17 August 2014 08:51 | 17 August 2014 9:29 | 2289 | 0.1 |
| 2806 | 17 August 2014 07:36 | 17 August 2014 8:53 | 4630 | 0.1 |
| Vehicle ID | Start time of Floating Car track | End Time of Floating Car Track | The Trajectory Observation Travel Time is Ti/Second | Average Earthquake Damage Index ind |
|---|---|---|---|---|
| 2807 | 18 August 2014 7:00 | 18 August 2014 8:17 | 4635 | 0.5 |
| 2808 | 18 August 2014 7:05 | 18 August 2014 8:16 | 4268 | 0.5 |
| 2809 | 18 August 2014 7:10 | 18 August 2014 8:25 | 4515 | 0.5 |
| 2810 | 18 August 2014 7:15 | 18 August 2014 8:14 | 3564 | 0.5 |
| 2811 | 18 August 2014 7:20 | 18 August 2014 8:45 | 5113 | 0.5 |
| 2812 | 18 August 2014 7:25 | 18 August 2014 8:26 | 3653 | 0.5 |
| Vehicle ID | Start Time of Floating Car Track | End Time of Floating Car Track | The Trajectory Observation Travel Time is Ti/Second | Average Earthquake Damage Index ind |
|---|---|---|---|---|
| 2813 | 19 August 2014 7:00 | 19 August 2014 8:55 | 6943 | 0.9 |
| 2814 | 19 August 2014 7:05 | 19 August 2014 8:14 | 4198 | 0.9 |
| 2815 | 19 August 2014 7:10 | 19 August 2014 8:58 | 6520 | 0.9 |
| 2816 | 19 August 2014 7:15 | 19 August 2014 8:31 | 4592 | 0.9 |
| 2817 | 19 August 2014 7:20 | 19 August 2014 8:47 | 5222 | 0.9 |
| 2818 | 19 August 2014 7:25 | 19 August 2014 8:58 | 5606 | 0.9 |
| Tc (s) | Before the Earthquake (%) | Ind = 0.1 (%) | ind = 0.5 (%) | ind = 0.9 (%) |
|---|---|---|---|---|
| 1800 | 44 | 25 | 16 | 11 |
| 3000 | 92 | 63 | 51 | 47 |
| 6000 | 98 | 97 | 82 | 58 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Wang, S.; Zhang, X.; Lv, M. Estimation and Reliability Research of Post-Earthquake Traffic Travel Time Distribution Based on Floating Car Data. Appl. Sci. 2022, 12, 9129. https://doi.org/10.3390/app12189129
Li Y, Wang S, Zhang X, Lv M. Estimation and Reliability Research of Post-Earthquake Traffic Travel Time Distribution Based on Floating Car Data. Applied Sciences. 2022; 12(18):9129. https://doi.org/10.3390/app12189129
Chicago/Turabian StyleLi, Yongyi, Shiqi Wang, Xiaorui Zhang, and Mengxing Lv. 2022. "Estimation and Reliability Research of Post-Earthquake Traffic Travel Time Distribution Based on Floating Car Data" Applied Sciences 12, no. 18: 9129. https://doi.org/10.3390/app12189129
APA StyleLi, Y., Wang, S., Zhang, X., & Lv, M. (2022). Estimation and Reliability Research of Post-Earthquake Traffic Travel Time Distribution Based on Floating Car Data. Applied Sciences, 12(18), 9129. https://doi.org/10.3390/app12189129