1. Introduction
Vibrational energy harvesters (VEHs) based on piezoelectric [
1,
2,
3] or inductive [
4,
5,
6] transduction have been frequently modeled in the previous literature, typically as lumped second-order mass–spring–damper systems. Power output at resonance and anti-resonance, power optimal load and efficiency are typically included in these analyses. The efficiency is typically defined as the ratio of input mechanical energy to output electrical energy, which is equivalent to the ratio of input power to output power [
1]. Resonance and anti-resonance refer to the case of coupled oscillators being either in phase (resonance) or out of phase (anti-resonance). Resonance occurs when the electrical damping is at its smallest, i.e., short-circuit conditions for a piezoelectric energy harvester (PEH) and open-circuit conditions for an electromagnetic energy harvester (EMEH). This corresponds to the natural frequency of the mechanical structure. Anti-resonance occurs when the electrical damping is at its largest, i.e., open-circuit conditions for the PEH and short circuit for the EMEH.
Essential parameters in these models are mechanical quality factor, ratio of excitation frequency to natural frequency, intrinsic impedance and resistance, load resistance and the electromechanical coupling coefficient. The latter is defined by the ratio of electrostatic (PEH) or electromagnetic (EMEH) energy to mechanical energy. There is a critical value of the effective electromechanical coupling coefficient, which is determined by the mechanical quality factor, at which the output power reaches a theoretical maximum, and an anti-resonant peak starts to emerge, as derived by Liao et al. [
3].
The lumped mechanics of a PEH or EMEH can be modeled in a unified way, assuming they are both systems with linear stiffness and damping. This has been exploited by [
7,
8,
9] to derive a general model applicable for both systems.
Arroyo et al. [
8] performs a thorough derivation of a general expression for generated power, normalized by the theoretical power limit. The analysis focuses on the generated power for varying load, mechanical quality factor and effective electromechanical coupling. Optimal load coefficients are described, but the optimal frequency, normalized by the natural frequency, is simply taken to be 1, thus not addressing the case of anti-resonance. In their paper, they note that the effective electromechanical coupling and resistive loss coefficient are both large for a typical EMEH and small for a typical PEH. From their survey, they also find a few existing PEHs achieving power performances close to the theoretical limit, while the typical EMEH has room for improvement.
Wang et al. has modeled the power output for VEHs in several papers and included the harmonic case [
7], cases with different types of loads, reactive and passive [
10,
11], and a derivation method which allows both harmonic and stochastic input to be used [
12,
13]. In [
7], Wang et al. performs a similar analysis to that conducted by Arroyo et al. [
8] (although theirs includes the aspect of harvesting efficiency) but assumes an effective coupling coefficient under the critical value, and thus the anti-resonant point is lost in the analysis. Contrary to [
8], Wang et al. neglects the intrinsic resistance for the PEH/EMEH (i.e., coil and dielectric resistance), which is common practice for PEHs but is not generally applicable for an EMEH and results in incorrect optimal load resistance [
6,
14].
Tai et al. [
15] derive separate dimensionless expressions for the average load power generated from a PEH and EMEH. Optimization here is primarily performed and analyzed relative to the electrical damping ratio and normalized excitation frequency. The case of nonnegligible intrinsic resistance is only considered for the EMEH and treated only numerically for two discrete values of the ratio of load resistance to intrinsic resistance. Their analysis deviates from the common approach in that they mainly consider the case of constant base displacement amplitude. The critical effective electromechanical coupling coefficient, as defined in [
3], is only treated for the case of a PEH and only discussed regarding the optimal load resistance.
In [
16], Liao et al. derive a general expression for the PEH power output using the equivalent circuit method, in which the entire system is expressed and solved in the electrical domain. The same theoretical power limit as mentioned previously is derived here and applies regardless of the interface circuit. A significant contribution of their analysis is an increased understanding of the critical electromechanical coupling coefficient and how it is affected by various interface circuits. The intrinsic resistance, and thus resistive loss coefficient, is not included in the analysis, and the characteristics of the resonant and anti-resonant solutions are not discussed.
Wang et al. and others [
1,
7,
17] arrive at the same expression for PEH efficiency. Kunz [
18] notes that previous models of PEH efficiency are lacking in a common approach to calculation. According to Kunz, the theoretical efficiency over-estimates the real scenario as the damping from air viscosity is not considered. Although the analysis by Wang et al. [
7] includes efficiency, in the context of both PEHs and EMEHs, it does so under the assumption of the negligible effect from intrinsic resistance.
In this paper, we use the lumped second-order mass–spring–damper system for the mechanical domain, and the lumped element system for the electrical domain, to derive a common dimensionless expression for generated power and efficiency, valid for both PEHs and EMEHs. In order to capture all the essential VEH characteristics, our model consists of a mechanical quality factor, an effective electromechanical coupling coefficient, an excitation frequency normalized by the natural frequency and two dimensionless coefficients accounting for intrinsic resistance and load resistance, defined as the resistive loss coefficient and load coefficient. Using the same set of parameters, we derive expressions for output power and efficiency based on system excitation from both inertial load and prescribed displacement. The comparison between these two types of excitations has not been performed in the previous literature.
To show the effect of all input parameters, in a relevant and clear way, we perform a numerical investigation in the domain of the mechanical quality factor and resistive loss coefficient, under the condition of optimal excitation frequency and load resistance. The effective electromechanical coupling coefficient is also varied to examine its dependence. As there are local power optima at both resonance and anti-resonance, we characterize the model at both points. Based on typical systems parameters, we compare the EMEH and PEH in the above defined space. Such an investigation, examining and comparing system characteristics at both resonance and anti-resonance while also considering the effect from the resistive loss coefficient in a detailed way, has not been performed in the previous literature, and results in new useful insights.
2. Method
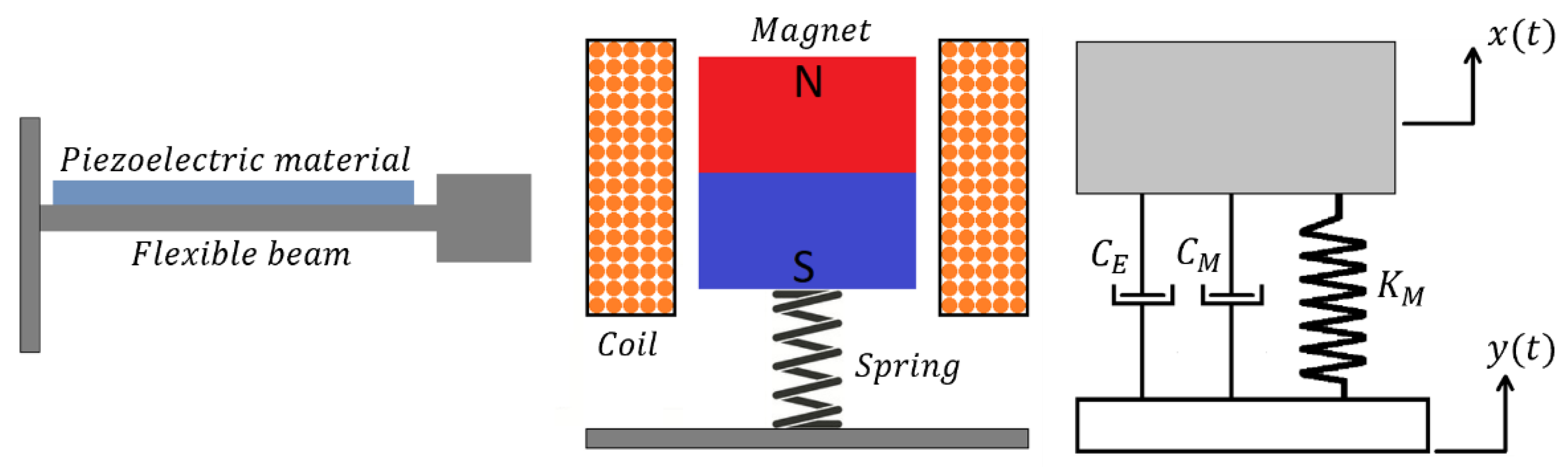
To find a common expression for PEH and EMEH power output, we use the second-order mass–spring–damper system and describe the proof mass movement of both PEHs and EMEHs, using Equation (1). Proof mass displacement is expressed as
,
is the effective mass,
is the total mechanical damping factor,
is the mechanical spring constant,
is the base displacement, and
is the damping force resulting from extracting electrical energy from the system. The corresponding free-body diagram is shown in
Figure 1 (right).
The electrical damping force,
for the PEH and EMEH is given by Equation (2).
Here,
and
are the instantaneously generated voltage and current for the respective VEH.
is a system-specific coupling factor and is a function of harvester dimensions and material properties, such as the piezoelectric coefficient or the magnetic remanence. The coupling factor relates displacement to current or voltage by:
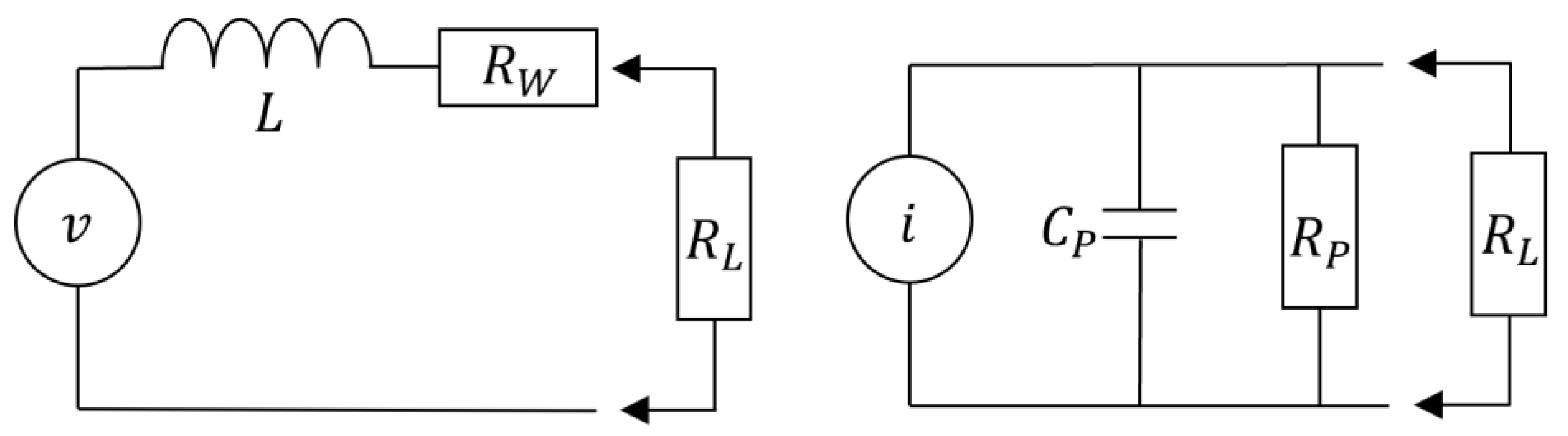
Next, we use the lumped element model in the electrical domain to express the generated power as a function of
. In
Figure 2, we model the EMEH as a voltage source,
, in series with an ideal inductor,
, and winding resistance,
. The PEH is modeled as a current source,
, in parallel with an ideal capacitance,
, and an electric resistance,
, due to the resistivity of the PEH. We use Kirchhoff’s first and second law to find the relationship between current and voltage in each case.
We can use Equation (4) together with Equations (2) and (3) to express proof mass displacement velocity as a function of the electrical damping, resulting in Equation (5).
To find a general governing equation, we perform the variable substitutions
and
for the PEH and
and
for the EMEH.
is the total output resistance and is given by Equation (6):
Applying the above-defined variables to Equation (5) yields a common expression for the proof mass velocity, as given by Equation (7).
The total average power, generated over the resistive components, can be derived from the RMS voltage or current as:
Using Equations (2) and (8), we can arrive at a general expression for the average power:
As our model assumes a purely resistive load, the average load power (Equation (10)) is found by applying a resistive division term to Equation (9).
As in the previous literature [
7,
8], we normalize the power output by a reference power
, where
is angular excitation frequency and
is the base displacement amplitude and use a set of dimensionless parameters according to
Table 1. For a more concise power expression, we further parameterize with dimensionless parameters according to
Table 2. The same variable substitution as described earlier, regarding A and B, is used in
Table 1 and
Table 2 where applicable.
Using Equations (1), (7), (9) and (10) and the dimensionless parameters described in
Table 1 and
Table 2, we can derive a unified expression for dimensionless average load power under inertial load,
(see derivation in
Supplementary Materials).
Equations (7), (9) and (10) can be used to derive the equivalent expression under prescribed displacement since
. As the effect of electric damping on proof mass displacement is negated in this case, the load power under prescribed displacement (
) can be derived in a more direct way by taking the square of the RMS voltage (for a PEH) or current (for an EMEH) acting on the load, multiplied or divided by the load resistance (see derivation in
Supplementary Materials). We can express this in a unified manner using the same set of dimensionless parameters as before. For comparability with the case of inertial load, we can also extract the same reference power as mentioned previously, which results in Equation (12).
The efficiency is defined as the average generated power by average input power [
1]. For the case of inertial load, we use the input power as derived by Yang et al. (see Equation (13))
Given the derivations in [
1], this results in the average input power given by Equation (14).
where
is the phase difference between
and
. In the case of prescribed displacement, there is no phase difference and
=
. We use Equation (1) together with Equation (13) to define the input power under prescribed displacement, resulting in Equation (15).
In summary, we derive (i) the dimensionless average power generated over the load resistance, Equation (11), based on a lumped second-order mass–spring–damper system with inertial load, Equation (1), and the lumped element model, Equation (4), for both the PEH and EMEH; (ii) the dimensionless average power assuming a prescribed proof mass displacement, Equation (12), and (iii) an expression for efficiency, Equation (16), relating load power to mechanical input power, valid for both the PEH and EMEH under both inertial load and prescribed displacement. Next, we analyze these general expressions to determine the common and dual characteristics of piezoelectric and electromagnetic energy harvesters.
4. Discussion
The unified models, Equations (11) and (12), show the common ground of both types of energy harvesters, PEHs and EMEHs. In the space of the dimensionless parameters , , , and , both systems are identical.
Our modeling results for inertially loaded VEH systems highlight differences in characteristics when run at resonance compared to anti-resonance. A relevant comparison can be made between these states and how the differences affect performance. This comparison is made especially relevant as the material characteristics, and the series vs. parallel circuit nature for the respective systems, lead to significantly different ranges of , and optimal .
We highlight additional characteristics of VEHs by comparing our results from the model with inertial load to those from the model assuming prescribed displacement.
Based on applied EMEHs/PEHs from the literature, we use the typical values for , and to identify which regions of the - space typically correspond to which VEH. From this, we can use our modeling results to characterize and compare typical applied EMEH/PEH systems.
4.1. Performance Comparison of Resonant and Anti-Resonant States
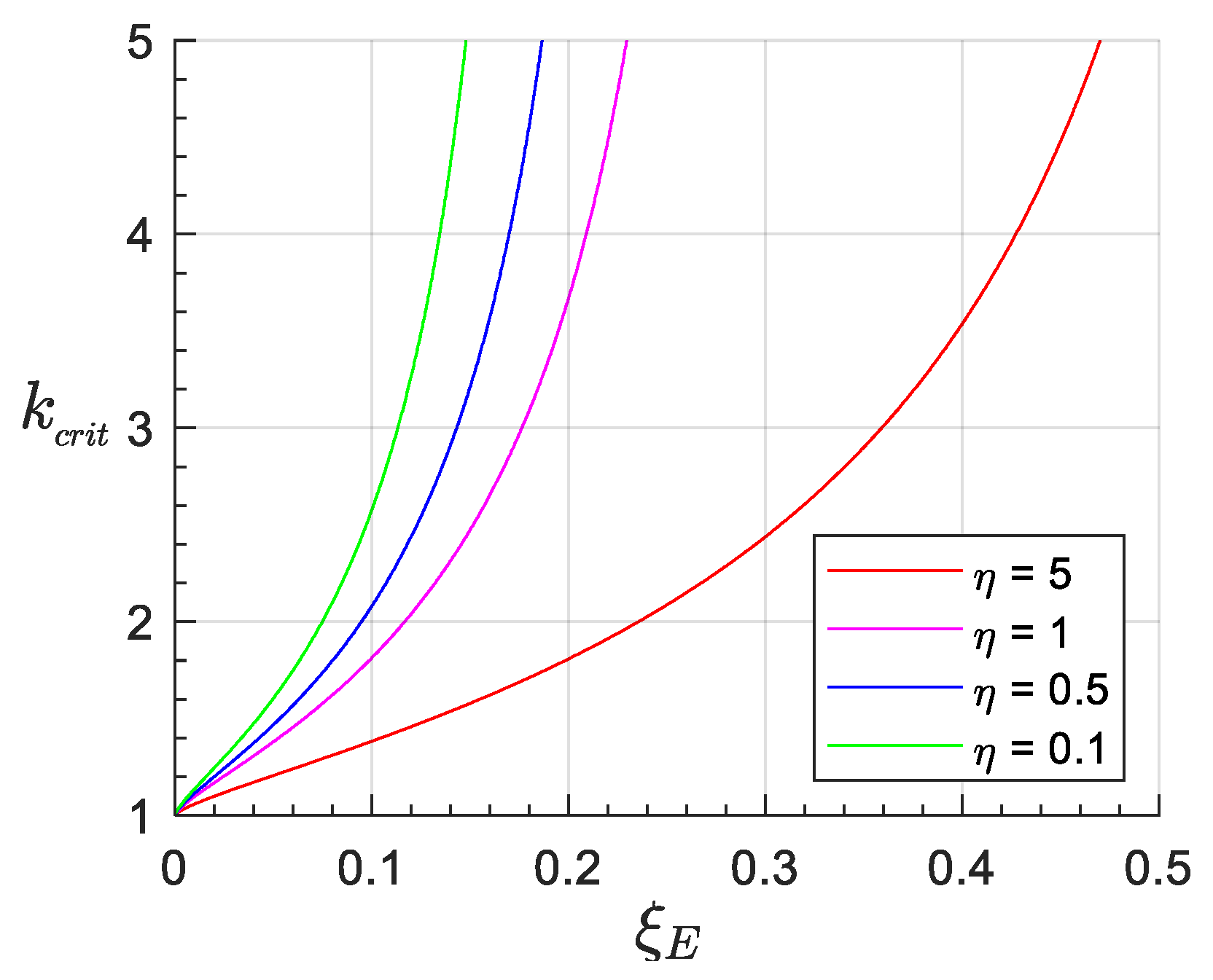
Both the resistive loss coefficient and the effective electromechanical coupling coefficient play a significant role in determining if VEH systems exhibit anti-resonance. As seen in
Figure 3,
and
define a critical value of
, at which the power reaches a theoretical limit and an anti-resonant peak starts to emerge. For systems with equivalent mechanical properties, the difference in
and
can thus determine if they are on opposite sides of this critical value of
(or equivalently,
).
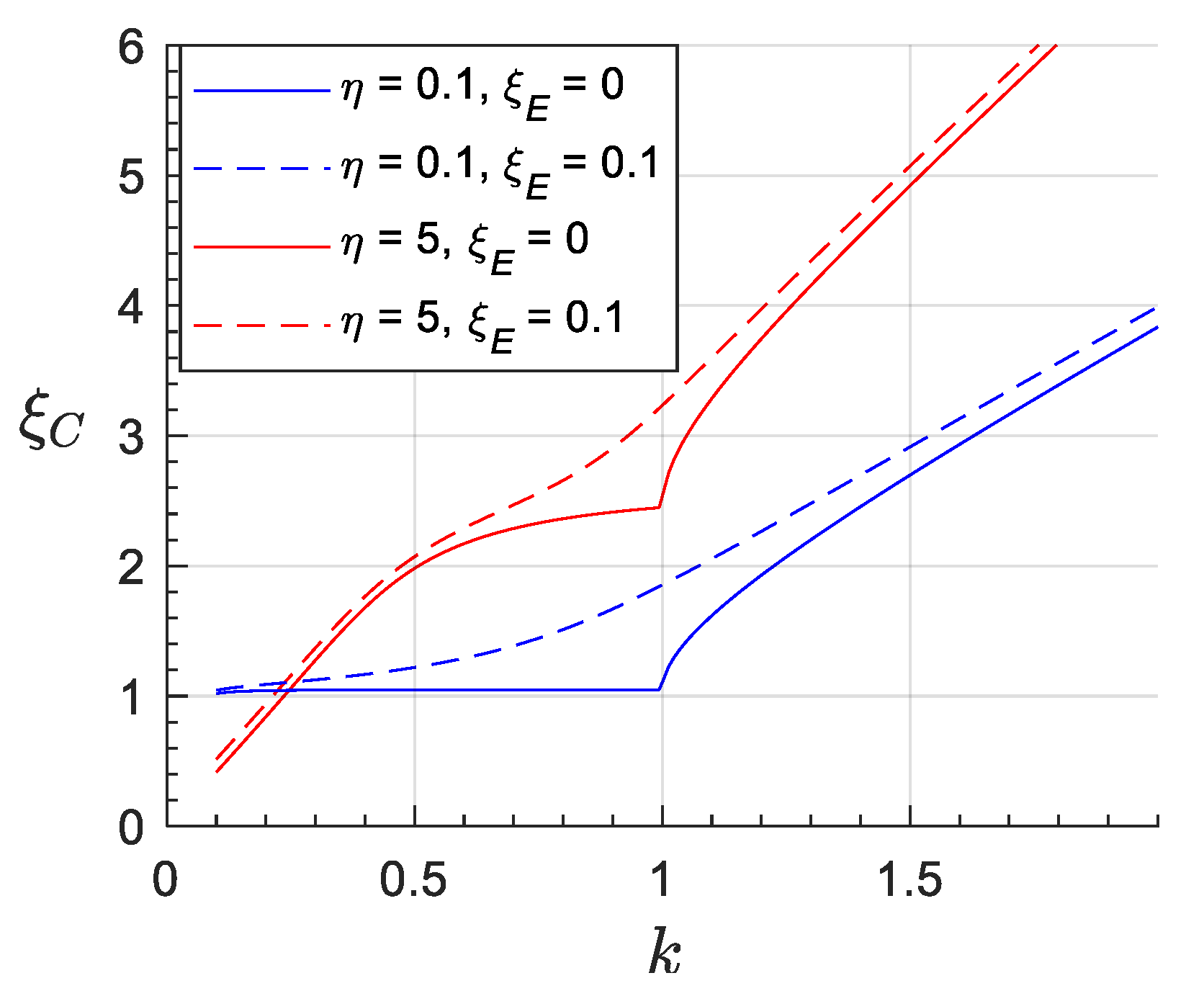
Assuming we can design an arbitrary EMEH or PEH to operate either at the resonant or the anti-resonant state, the two VEH systems will benefit differently from operating under either condition. Using the results of
Section 3, we can compare these states regarding the key performance parameters: output voltage, power and efficiency.
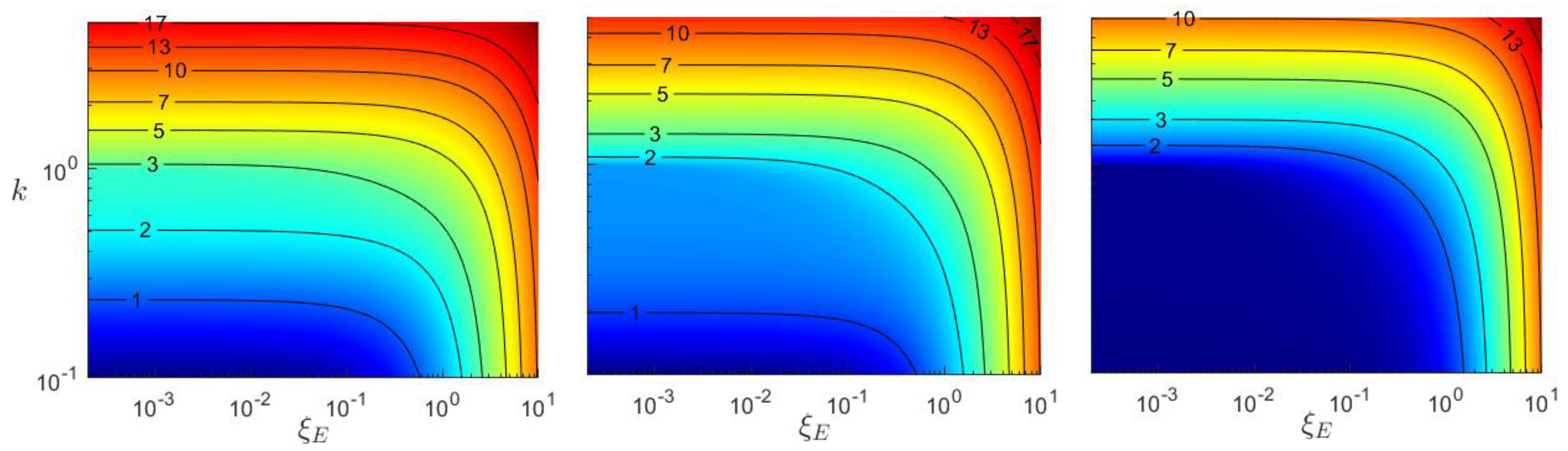
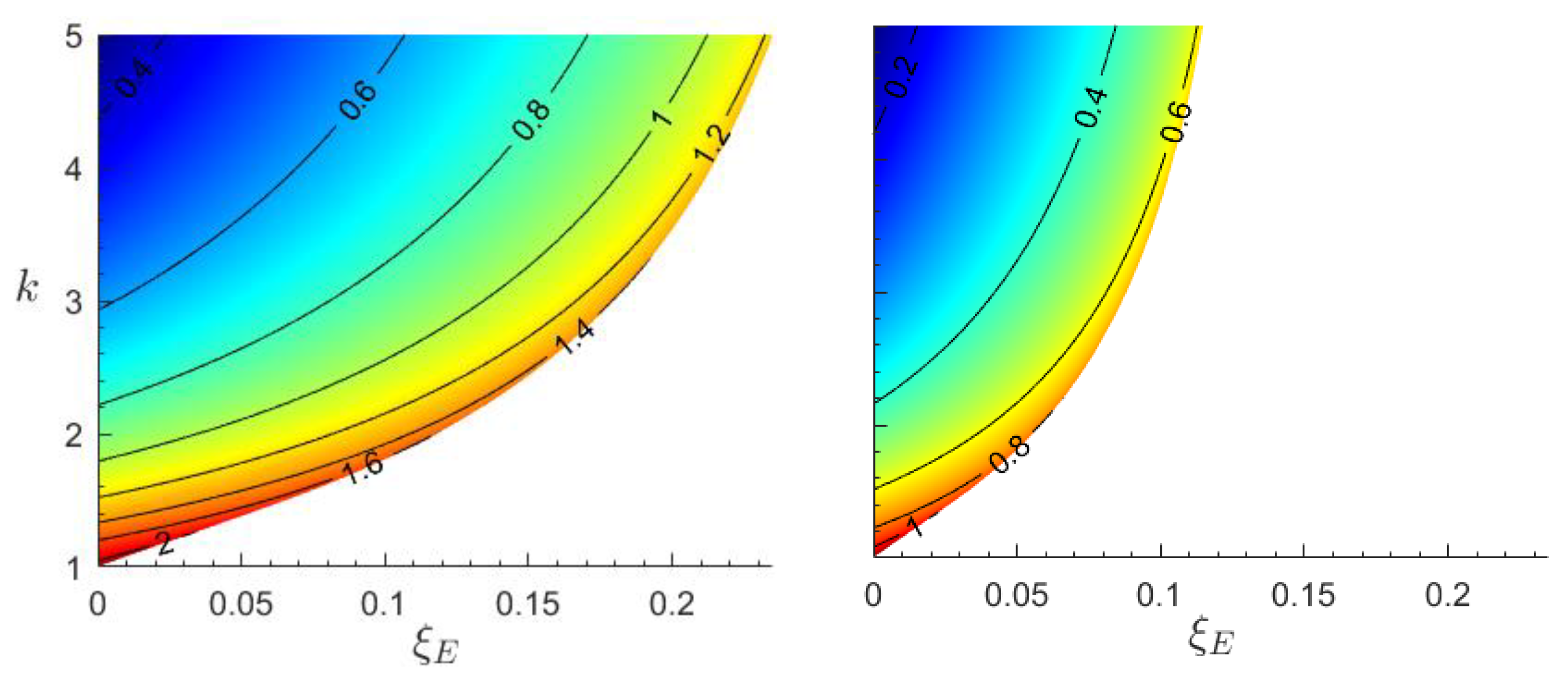
In general, a large output voltage is beneficial due to the substantial voltage drop in typical voltage rectification circuits. Due to the series nature of the EMEH circuit model, a large output voltage is obtained when
is large and
is small, while for a PEH, both should be small. From the results in
Figure 5 and
Figure 6, we can see that a system run at resonance can in general achieve large values of optimal
at high
values. On the contrary, values of optimal
at resonance require large values of
and
(see
Figure 6). Only at anti-resonance (see
Figure 9) can we achieve an optimal
at small values of
. In both cases (PEH/EMEH), an increasingly beneficial value of optimal
, with regard to output voltage, is achieved at increasing
.
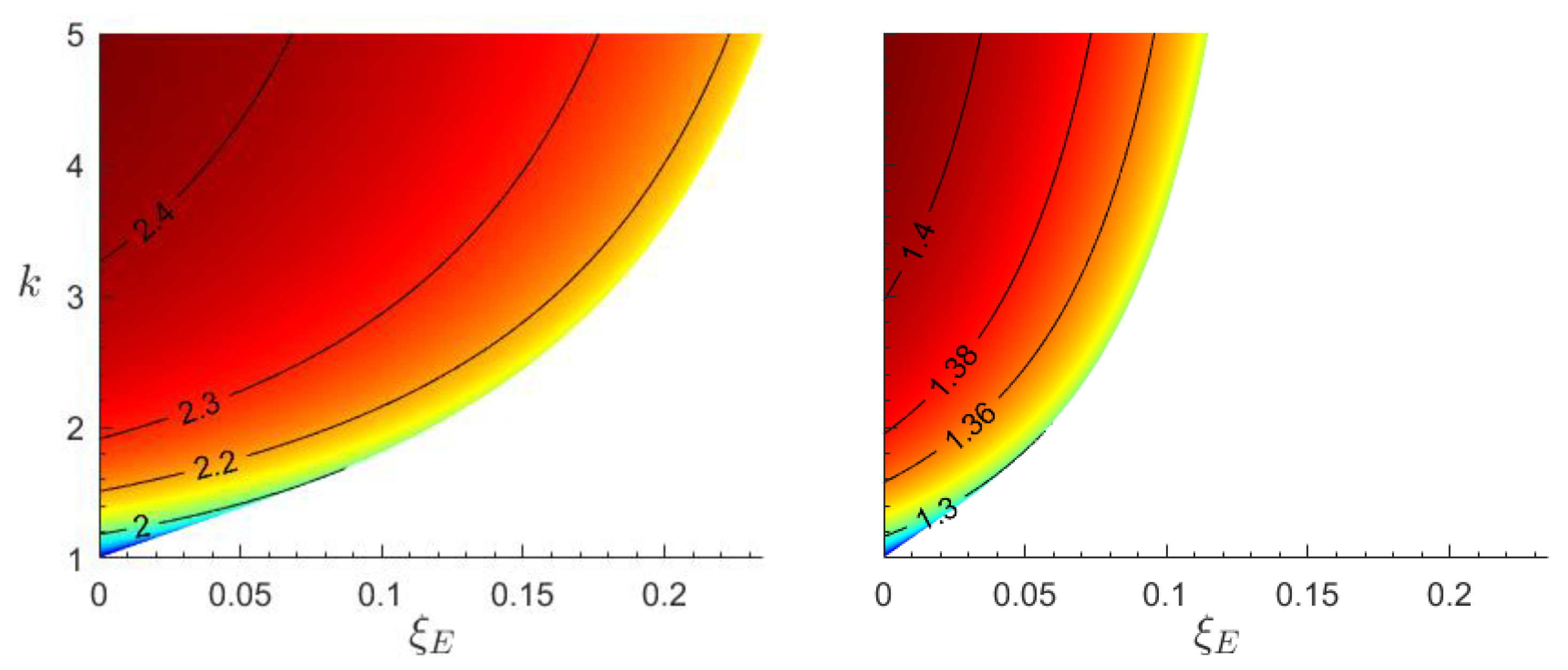
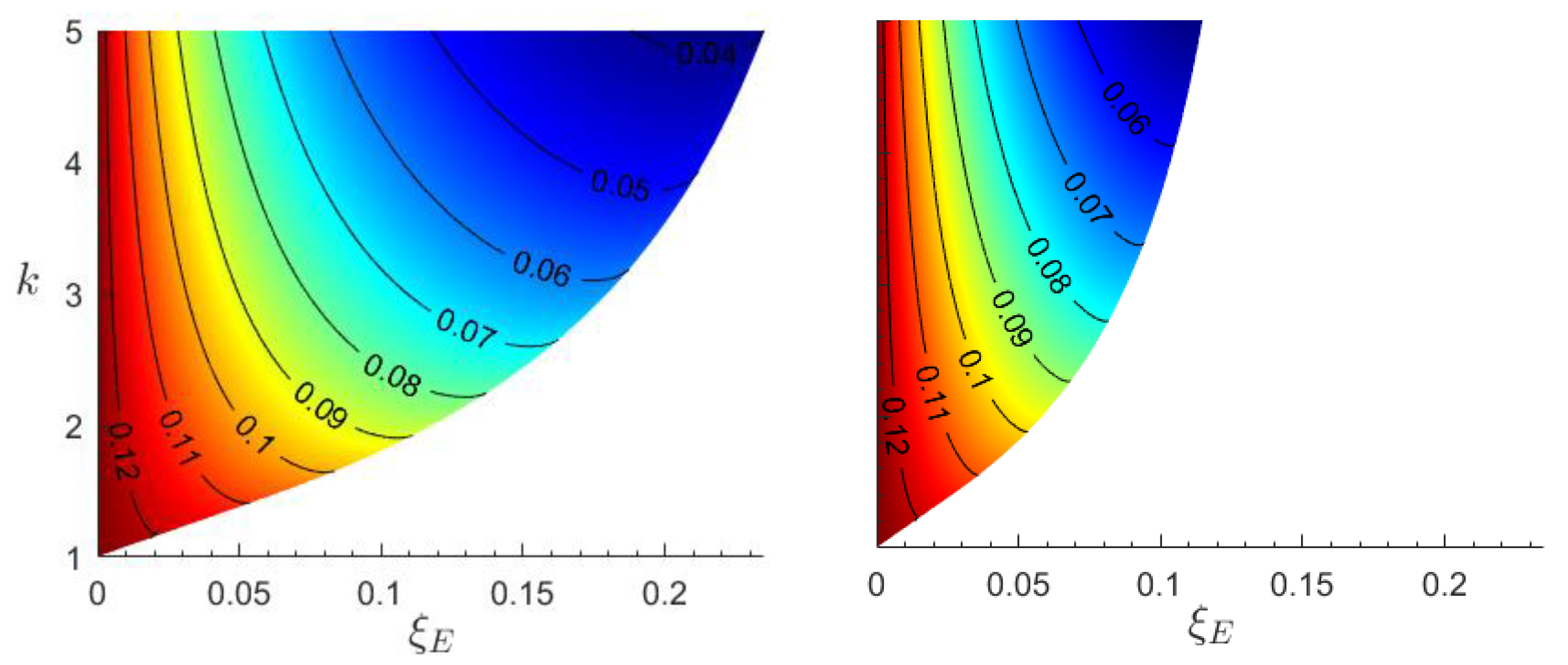
In a similar sense, the power characteristics at anti-resonance (
Figure 10) also favor the PEH over the EMEH as the power rapidly declines at increasing
and
, while it is close to its theoretical maximum for
, regardless of
.
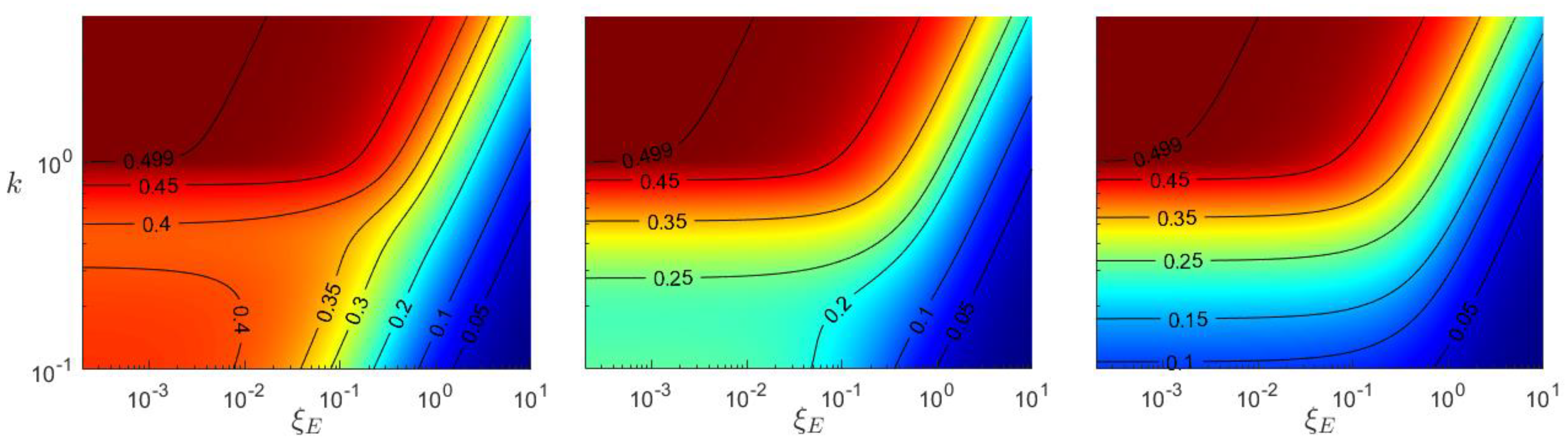
Assuming load and excitation frequency remain optimized by load power, both VEH systems have a maximum efficiency of 50% at resonance (see
Figure 12). At anti-resonance, the efficiency is above 50% (if
) and increases along the boundary of
, in the direction of larger
and
(see
Figure 13). It may be beneficial to operate in this region if the source power is small, as the load power cannot be larger than efficiency times source power. If we instead assume an arbitrary
and a load optimized by efficiency, a system with a larger
will have a larger maximum efficiency, although for
, the difference will be very small.
4.2. Comparison of Systems under Prescribed Displacement and Inertial Load
For the case of prescribed displacement and optimal load, the two systems (PEH/EMEH) have equivalent load power, which differs only in the relation to intrinsic electrical impedance. As the intrinsic impedance in an EMEH is in series with the load resistance, it should be minimized to maximize load power, and vice versa for the PEH.
Under the assumption of
, we can extract an optimal load resistance from Equation (22) as:
which shows that power optimization is achieved by impedance matching in this case. We compare this to the corresponding case of inertial load (see Equation (17)), which gives:
The above expression for optimal load resistance for an EMEH, under inertial load, can also be found in [
6,
14], under the assumption of negligible effect from inductance (
. The term
in the optimal load for an EMEH, is in [
14] defined as the electrical analogue of the mechanical damping. The same term appears in the optimal load expression for a PEH. In this case, the electrical analogue is equivalent to a resistance in parallel with the impedance, and thus becomes
for a PEH. Although the electrical analogues are inverted between the systems, the series vs. parallel nature means the ratio
should in both cases be minimized to achieve the highest possible power. This must be weighed against the negative effects of reducing the coupling factor,
, or increasing the mechanical damping.
Intuitively, the difference in optimal load between the case of prescribed displacement and inertial load lies only in the electrical analogue to mechanical damping, which is only present in the case of inertial load. The comparison between the cases of inertial load and prescribed displacement thus supports the argument made by [
14] that simple impedance matching does not provide the optimal load in the case of an energy harvester under inertial load.
Our results also show that applying the same resonant frequencies for the case of inertial load to the case of prescribed displacement generally leads to significantly larger dimensionless power output. This indicates that it may be beneficial to create a forced vibration of the proof mass if possible (e.g., by fixating to a surface that is static relative the vibrating surface). For the corresponding anti-resonant frequencies, this only holds for sufficiently small values of and .
4.3. Comparison of PEH/EMEH Assuming Typical Parameter Values
Systems in the regime,
,
and
, are uncommon according to the small survey performed in [
8]. This survey shows the typical case for an EMEH to be
and
, and for a PEH it is
and
. Even though
for an EMEH, it is still likely less than
, as
increases exponentially with
(see
Figure 3). This leads to both systems typically having only one power optimum,
, corresponding to the resonant state. The same source, [
8], states that
is typically small for a PEH (also mentioned in [
1]) compared to an EMEH. Assuming
(which implies
for the PEH, we can conclude that the typical case is that both systems have
.
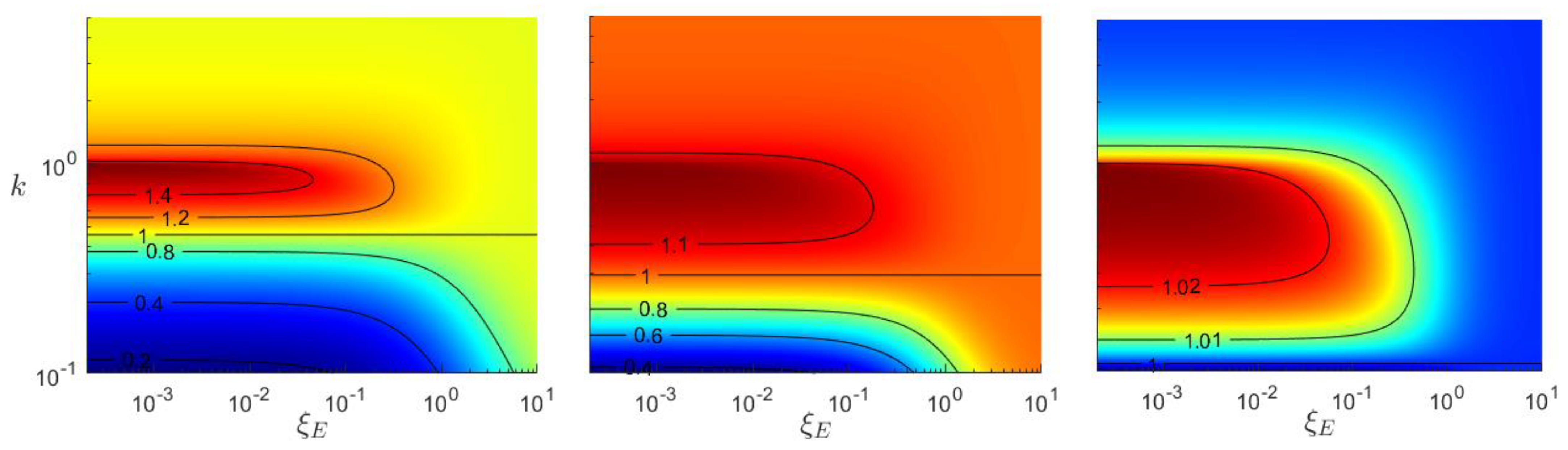
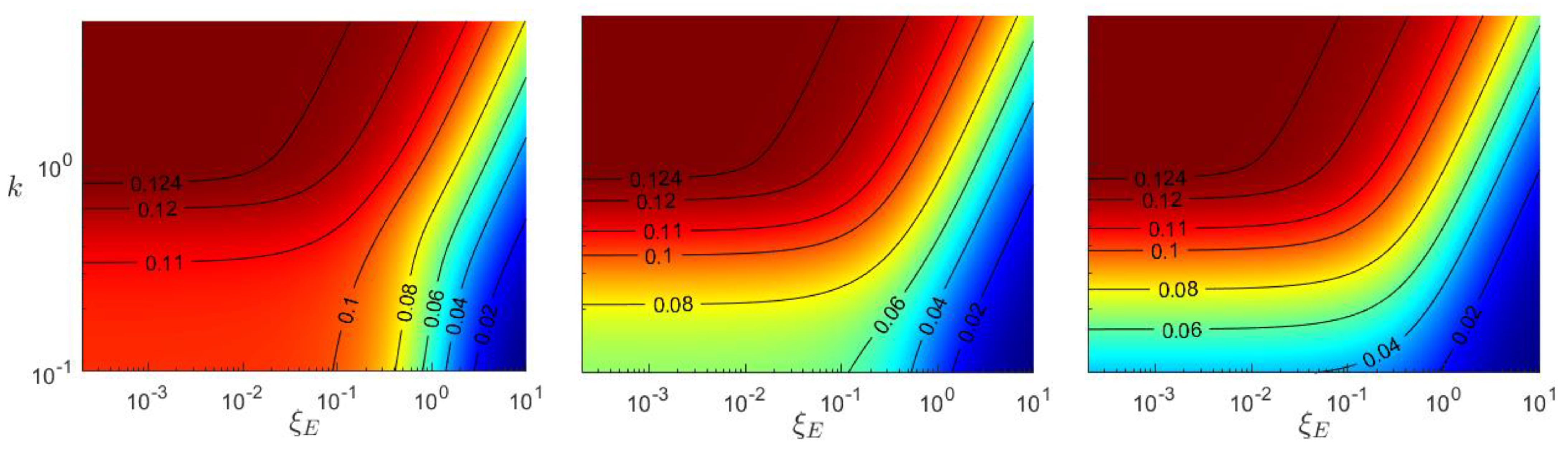
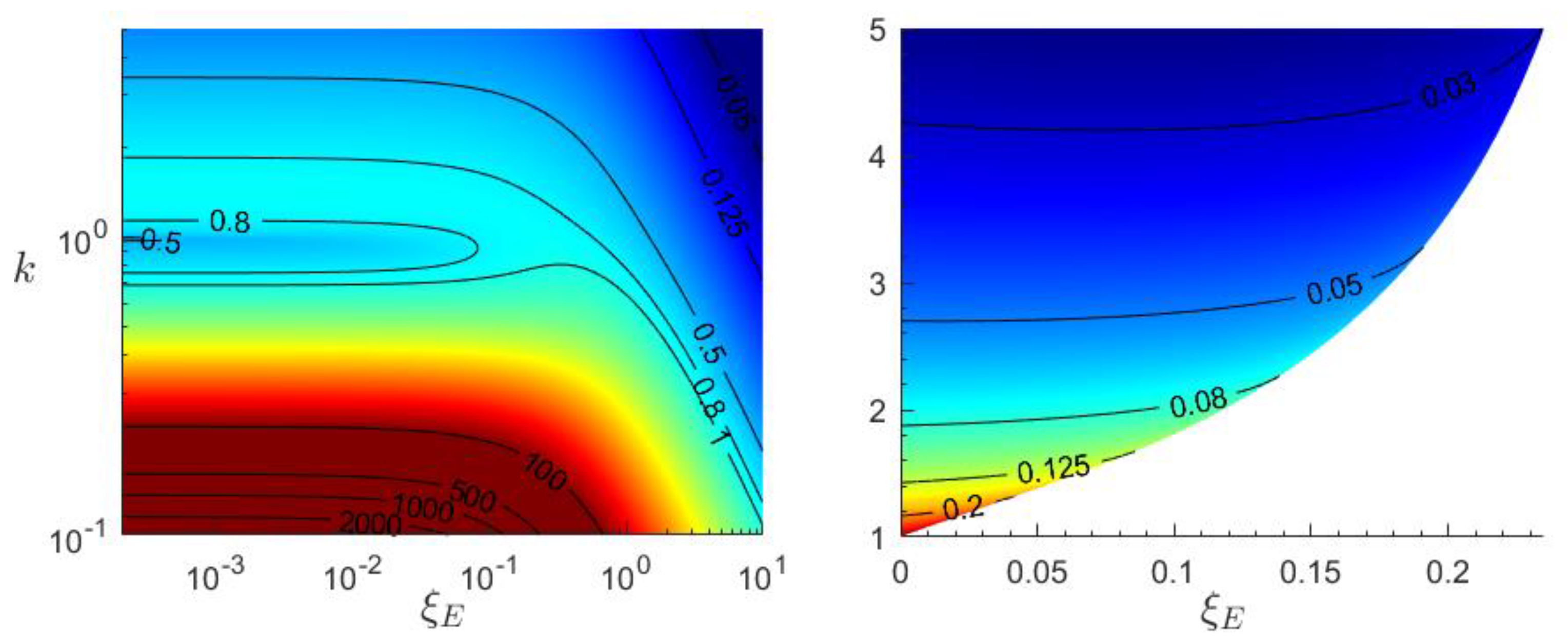
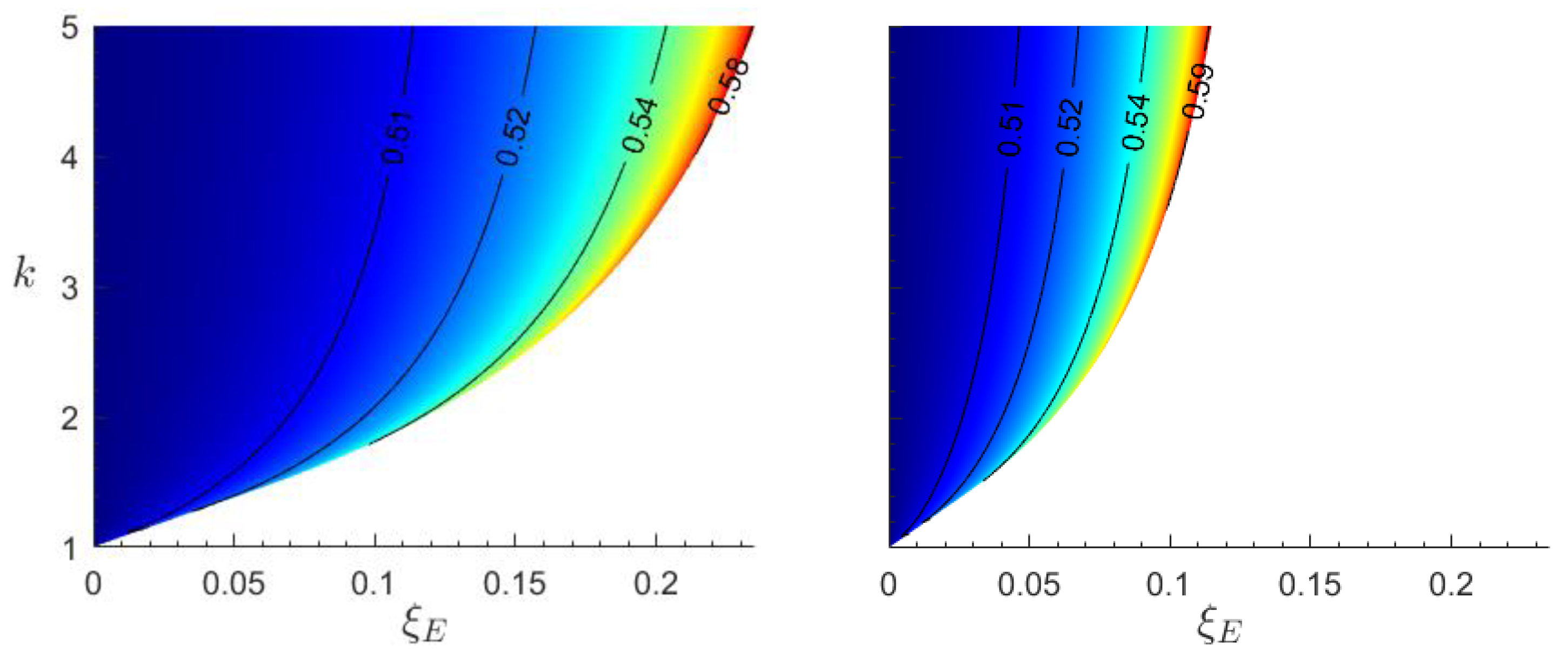
Using the typical values for
and
for an EMEH and PEH, respectively, we can state that power generated from an EMEH can be found in the upper right region of
Figure 7 (left), while for the PEH it is found in the lower left region of
Figure 7 (right). These numerical results indicate that, for a specific value of
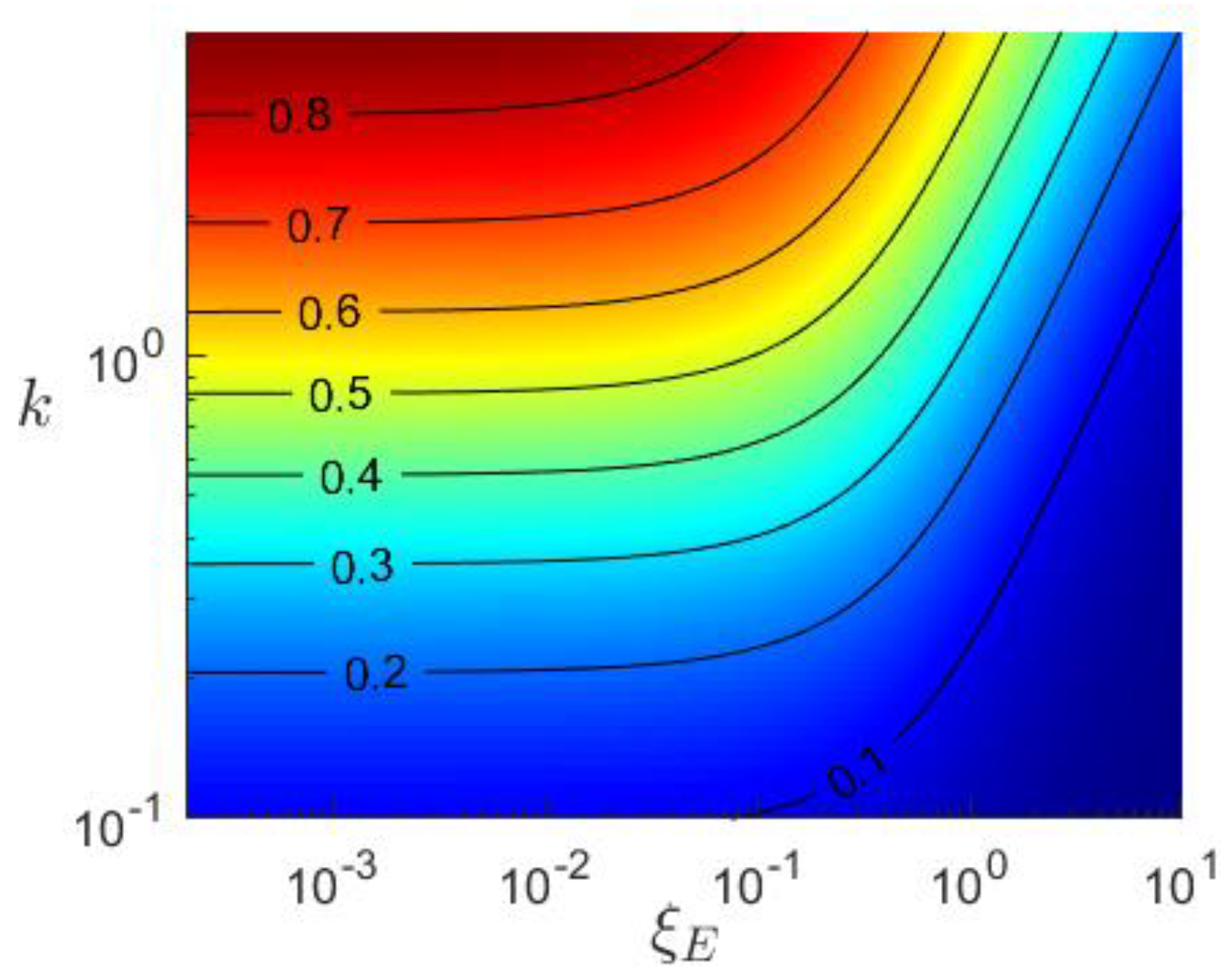
, the dependance between
and
has a constant linear slope in the logarithmic space, if
, with varying offset depending on the value of
. We find that, regardless of
, the linear slope in this region is approximately 1. The dependance between the ratio
and value of
to be traced thus follows a logarithmic slope.
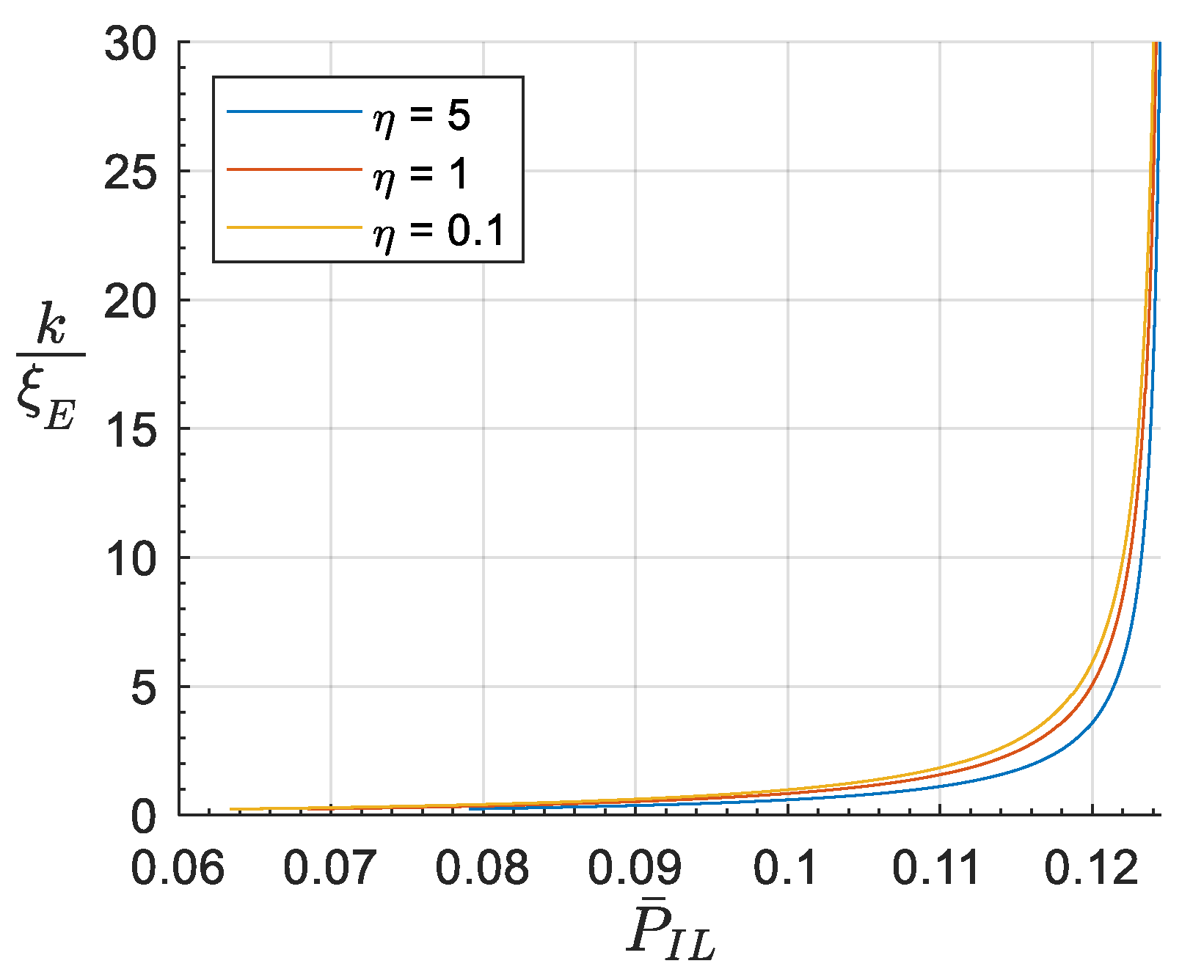
Figure 15 shows
as a function of
at
. We can see that the sensitivity of
to
increases dramatically near the theoretical power maximum. The quality factor and/or effective coupling coefficient required to achieve a power output close to the theoretical maximum can thus become large for energy harvesters with a large loss coefficient, such as for a typical EMEH.
In the region of
and
, the sensitivity of
to
is small. The power is in this region mainly a function of
and
. The goal for both types of energy harvesters should be to achieve a load power as close to the theoretical maximum as possible, without requiring a large quality factor, as the latter is equivalent to a small bandwidth. In both cases,
should be as large as possible, while
should be close to its critical value (see
Figure 3). The loss factor,
, typically only relevant for an EMEH, should be minimized.
The same arguments regarding load power can be applied to efficiency if load and excitation frequency remain optimized by load power.
4.4. Model Accuracy
Deriving an expression for the energy harvester power output, based on the lumped parameter model of Equation (1), and electric models of Equation (4), has been performed frequently in the previous literature. We compared our derived expression to those in [
1,
7,
8,
14] and found that, although different approaches are implemented and certain assumptions made, the resulting power expressions are equivalent. Measurements by duToit et al. [
2] showed that the model significantly underpredicted measured PEH power output close to resonance and anti-resonance but was in good agreement off-resonance. Applying the model to the MEMS-scale EMEH in [
4] results in a similar underprediction of the power at resonance. However, by reducing the input acceleration, an accurate prediction can be made even at resonance. This result is reasonable as the model is linear and will naturally break down outside of the linear regime. Arroyo et al. finds a good match between predicted and measured EMEH data at resonance while using a beam similar to that used by duToit et al., yet under a significantly larger base acceleration.
duToit et al. deduced the reason for their discrepancy to be the small-signal linear piezoelectric constitutive model, which underpredicted the piezoelectric constant at large strain. Triplett et al. [
19] later confirmed that this nonlinear behavior is significant unless the tip displacement is small. Similarly, for the assumed case of a magnet traveling along the symmetry axis of a cylindrical coil, there are nonlinear effects in the electromechanical coupling of the EMEH arising from the nonlinear expansion of the magnetic field (along the symmetry axis) [
4,
5]. Thus, the requirement of small displacement is valid for an EMEH as well. Likewise, if we measure the coupling coefficient at a specific displacement amplitude and keep this parameter constant during measurements and calculations, the discrepancy between model and measurement due to nonlinear electromechanical coupling should be reduced.
For the model under inertial load, a constant base acceleration amplitude is assumed. This has a significant effect on the model output characteristics. As base acceleration amplitude equals where is angular excitation frequency and is the base displacement amplitude, this implies that either and are constant, and varies only due to spring stiffness and mass, or that is inversely proportional to . The latter case breaks down as approaches zero as this implies . The alternative is that remains constant and the ratio of spring stiffness to mass approaches infinity, which is a feasible case.
5. Conclusions
This article sets out to provide an increased understanding of piezo- and magnetoelectric energy harvesting systems and their combination, and to develop a tool to aid the development of harvester prototypes.
We achieve this objective by deriving general expressions for PEH/EMEH power output, using the full set of relevant dimensionless parameters, , , , and . While the model does not account in a direct way for nonlinear effects, it conveys an understanding of the behavior throughout the parameter space. Once the region of interest has been identified, one can apply refined nonlinear models. In this sense, the model helps in the choice of a suitable transduction method for a specific application as well as for the design of energy harvesters.
To shed new light on previously well-established VEH systems, we perform a detailed analysis with regard to the resistive loss coefficient, which is lacking in the previous literature. We find that this parameter plays a significant role in differentiating inertially loaded PEH/EMEH systems, especially in the context of resonant and anti-resonant operation. We find that at resonance, both systems have similar potential power performance, with the EMEH being favored due to a potentially larger load voltage. At anti-resonance, the PEH is favored both in regard to power output and voltage. Our results show a larger input to output power efficiency at anti-resonance compared to resonance. It can thus be beneficial to run the VEH with a larger load resistance in cases where the source power is small, assuming the source vibration spectrum is similar around the energy harvester’s resonance and anti-resonance frequencies.
Considering typical parameter values for applied EMEH/PEH systems, we can conclude that they are generally designed to operate at resonance. Under these assumptions, we can still draw some important conclusions. Compared with a PEH, an EMEH will be practically limited in achieving a power output closer to the theoretical maximum, less sensitive to resistive loss with regard to critical factor and have an optimal load highly sensitive to the quality factor.
Our investigation of the model under prescribed displacement, which is also lacking in the previous literature, shows that the expression for efficiency is equal to that of the model under inertial load, which is a reasonable result assuming efficiency is a purely intrinsic property (independent of external excitation). We also find that the expressions for optimal load differ between the two types of excitations only by the term naturally arising from electrical damping, supporting the argument that impedance matching is not the correct approach to load optimization of inertially loaded systems. From a practical viewpoint, our results indicate that under resonant excitation frequencies, a higher dimensionless power can generally be achieved if the proof mass oscillations can be forced. At anti-resonant frequencies, this is only holds for sufficiently small and .
Thanks to the detailed investigation of the resistive loss coefficient and the case of prescribed displacement, our investigation essentially widens the range of potential methods that may be used to find high-performance VEH designs and thus increases the possibility of VEHs being useful in an increasing number of applications.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}