

Drone and Controller Detection and Localization: Trends and Challenges

 , , , , , , and
, , , , , , and 
Abstract
:1. Introduction
2. UAV Architecture and Security Concerns
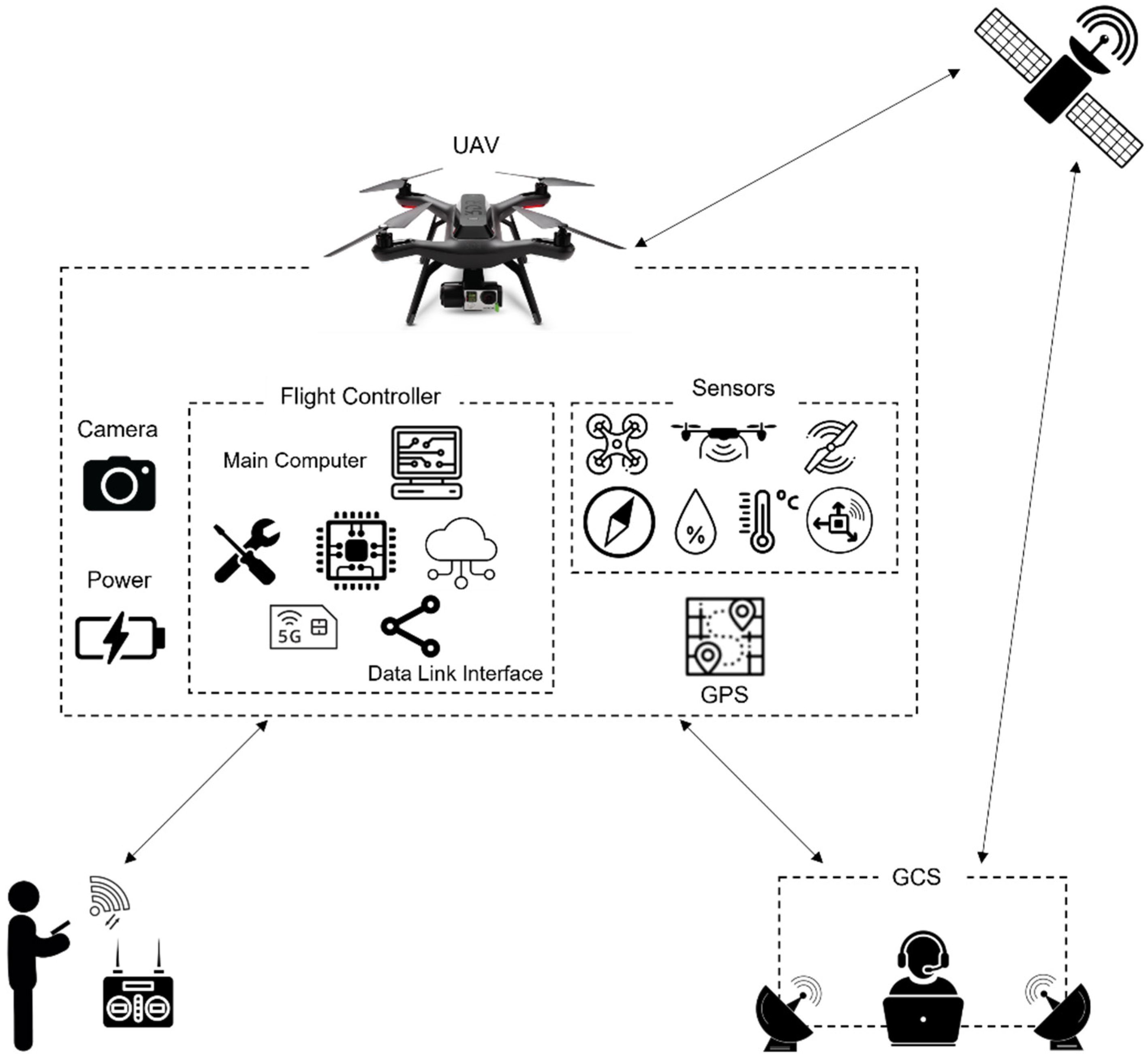
2.1. UAV Architecture
- UAV’s structure/airframe: There are many common features of a UAV’s chassis, such as lightweight, small size, endurance, aerodynamic flexibility, etc.
- Main computer: The critical part responsible for autonomous functioning and flight control. The computing subsystem processes sensed information, transmits it back, manages flight operations, and communicates with the control base.
- Sensors/payloads: UAVs can be equipped with a range of possible lightweight sensors per the application’s needs, including RGB cameras, thermal sensors, LiDAR sensors, and multispectral and hyperspectral sensors. All of them are connected to the flight controller to gather real-time data and process it for the missions’ execution.
- Communication link: UAVs are equipped with a high-quality wireless communication unit, including 5G, WiFi, Bluetooth, and radio-frequency identification (RFID), to facilitate communication with the GCS or the internet.
- Ground control station (GCS): This base station is mainly employed to monitor and control the UAV during its operation. Flight operation is continuously monitored and can be controlled to alter the mission.
2.2. Security Concerns
3. UAV Detection Methods
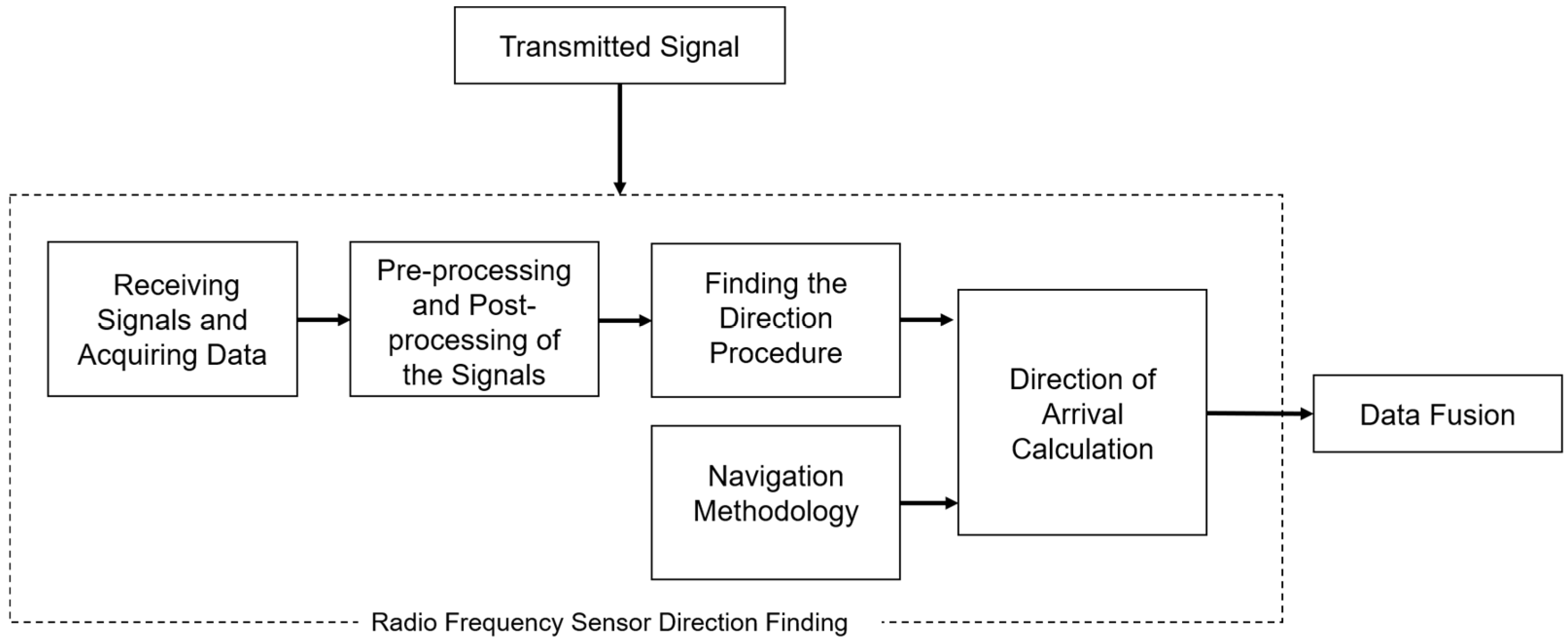
3.1. RF-Based
3.2. Radar
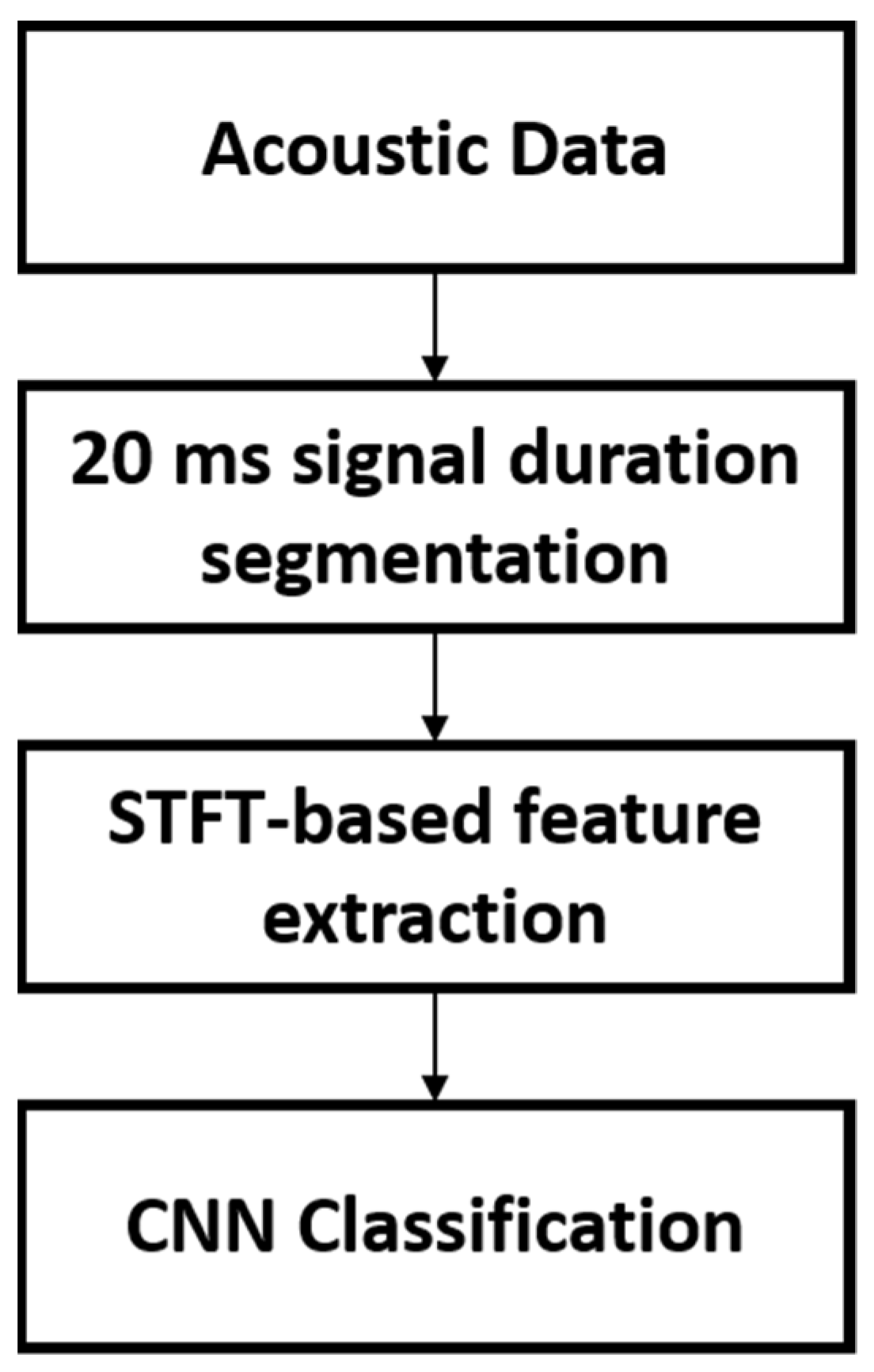
3.3. Acoustic
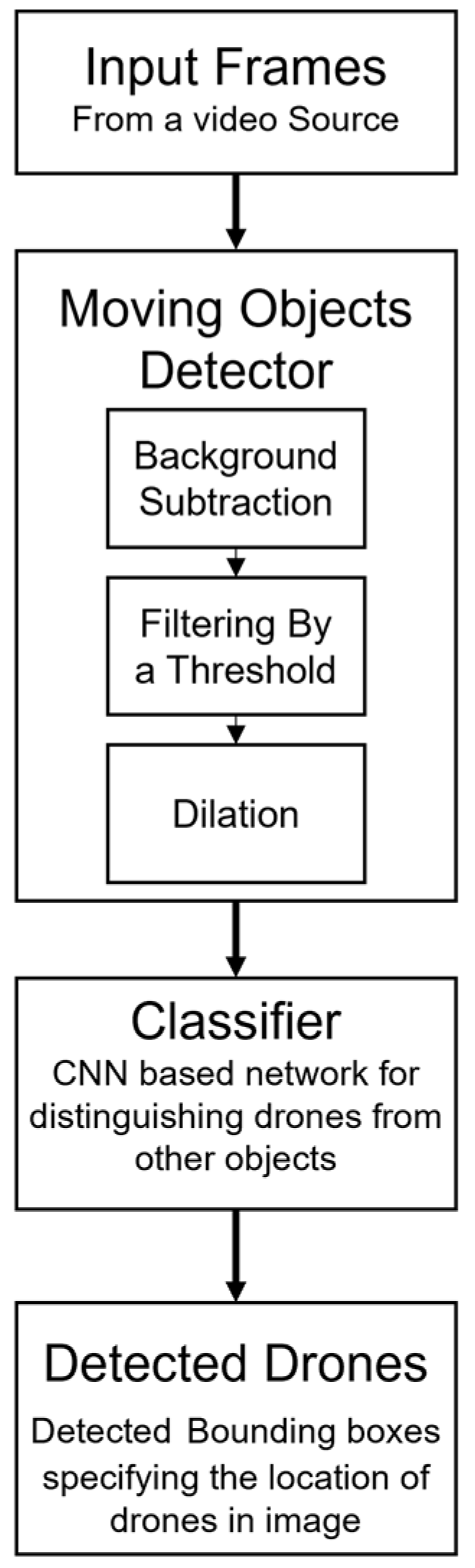
3.4. Electro-Optical
3.5. Hybrid Fusion Systems
3.6. Comparison of Detection Technologies
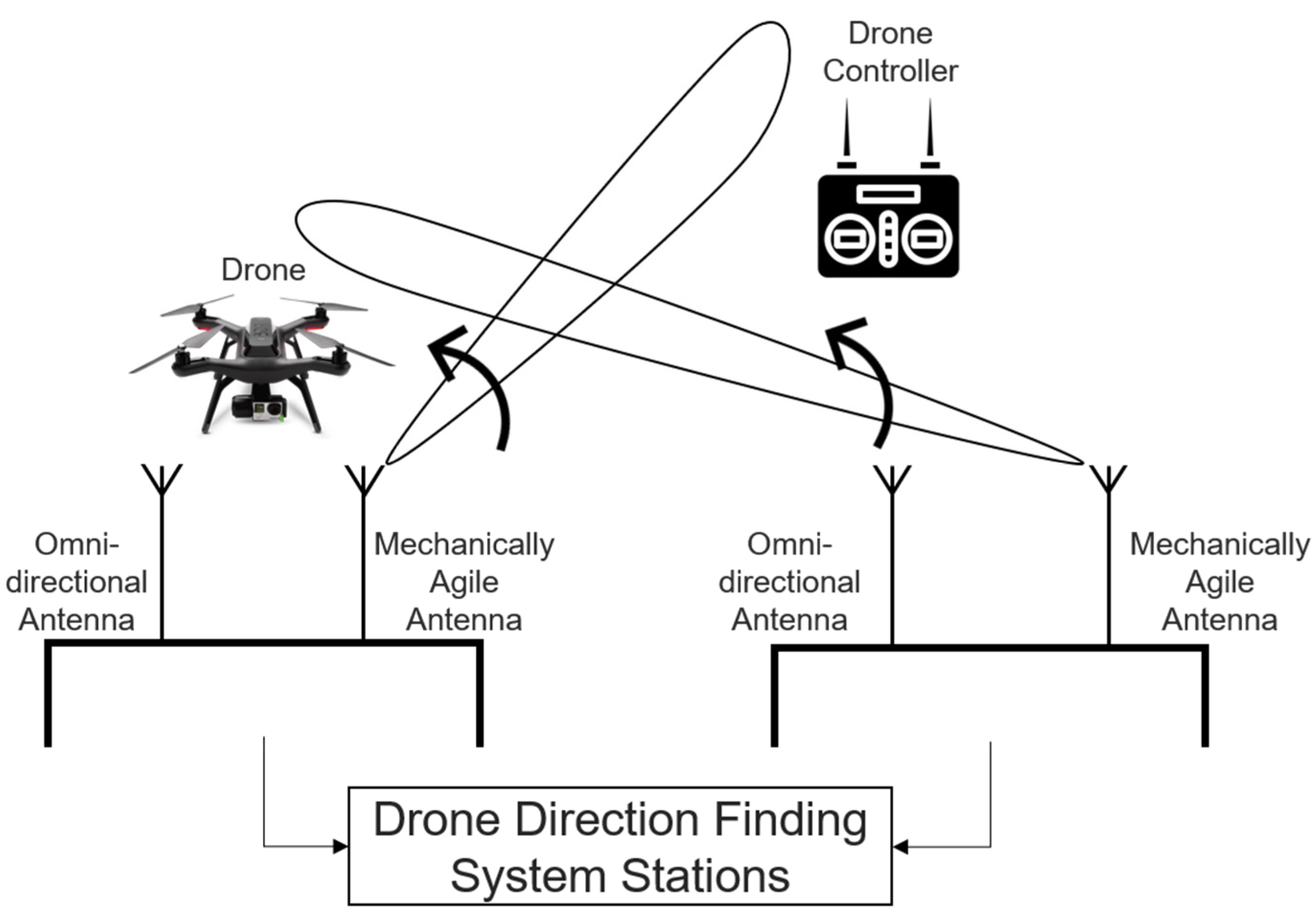
4. Drone Controller Detection and Localization
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A review on UAV-based applications for precision agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef] [Green Version]
- Liu, P.; Chen, A.Y.; Huang, Y.-N.; Han, J.-Y.; Lai, J.-S.; Kang, S.-C.; Wu, T.-H.; Wen, M.-C.; Tsai, M.-H. A review of rotorcraft Unmanned Aerial Vehicle (UAV) developments and applications in civil engineering. Smart Struct. Syst. 2014, 13, 1065–1094. [Google Scholar] [CrossRef]
- Shahmoradi, J.; Talebi, E.; Roghanchi, P.; Hassanalian, M. A Comprehensive Review of Applications of Drone Technology in the Mining Industry. Drones 2020, 4, 34. [Google Scholar] [CrossRef]
- Kannadaguli, P. YOLO v4 Based Human Detection System Using Aerial Thermal Imaging for UAV Based Surveillance Ap-plications. In Proceedings of the International Conference on Decision Aid Sciences and Application (DASA), Sakheer, Bahrain, 8–9 November 2020; pp. 1213–1219. [Google Scholar]
- Utsav, A.; Abhishek, A.; Suraj, P.; Badhai, R.K. An IoT Based UAV Network for Military Applications. In Proceedings of the 6th International Conference on Wireless Communications, Signal Processing and Networking (WiSPNET), Chennai, India, 25–27 March 2021; pp. 122–125. [Google Scholar]
- Whelan, J.; Almehmadi, A.; Braverman, J.; El-Khatib, K. Threat Analysis of a Long Range Autonomous Unmanned Aerial System. In Proceedings of the 2020 International Conference on Computing and Information Technology (ICCIT-1441), Tabuk, Saudi Arabia, 9–10 September 2020; pp. 1–5. [Google Scholar]
- Nie, W.; Han, Z.C.; Zhou, M.; Xie, L.B.; Jiang, Q. UAV Detection and Identification Based on WiFi Signal and RF Finger-print. IEEE Sens. J. 2021, 21, 13540–13550. [Google Scholar] [CrossRef]
- Bisio, I.; Garibotto, C.; Lavagetto, F.; Sciarrone, A.; Zappatore, S. Unauthorized Amateur UAV Detection Based on WiFi Statistical Fingerprint Analysis. IEEE Commun. Mag. 2018, 56, 106–111. [Google Scholar] [CrossRef]
- Ezuma, M.; Erden, F.; Anjinappa, C.K.; Ozdemir, O.; Guvenc, I. Micro-UAV detection and classification from RF finger-prints using machine learning techniques. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; pp. 1–13. [Google Scholar]
- Abeywickrama, S.; Jayasinghe, L.; Fu, H.; Nissanka, S.; Yuen, C. RF-based Direction Finding of UAVs Using DNN. In Proceedings of the IEEE International Conference on Communication Systems (ICCS), Chengdu, China, 19–21 December 2018; pp. 157–161. [Google Scholar]
- Bhattacherjee, U.; Ozturk, E.; Ozdemir, O.; Guvenc, I.; Sichitiu, M.L.; Dai, H. Experimental Study of Outdoor UAV Localization and Tracking using Passive RF Sensing. In Proceedings of the 15th ACM Workshop on Wireless Network Testbeds, Experimental evaluation & CHaracterization, New Orleans, LA, USA, 31 January–4 February 2022; pp. 31–38. [Google Scholar]
- Nguyen, P.; Kim, T.; Miao, J.; Hesselius, D.; Kenneally, E.; Massey, D.; Frew, E.; Han, R.; Vu, T. Towards RF-based Localization of a Drone and Its Controller. In Proceedings of the 5th Workshop on Micro Aerial Vehicle Networks, Systems, and Applications, Seoul, Republic of Korea, 21 June 2019. [Google Scholar]
- Nemer, I.; Sheltami, T.; Ahmad, I.; Yasar, A.U.-H.; Abdeen, M.A.R. RF-Based UAV Detection and Identification Using Hierarchical Learning Approach. Sensors 2021, 21, 1947. [Google Scholar] [CrossRef]
- Ozturk, E.; Erden, F.; Guvenc, I. RF-based low-SNR classification of UAVs using convolutional neural networks. ITU J. Futur. Evol. Technol. 2021, 2, 39–52. [Google Scholar] [CrossRef]
- Alipour-Fanid, A.; Dabaghchian, M.; Wang, N.; Wang, P.; Zhao, L.; Zeng, K. Machine Learning-Based Delay-Aware UAV Detection and Operation Mode Identification Over Encrypted Wi-Fi Traffic. IEEE Trans. Inf. Forensics Secur. 2019, 15, 2346–2360. [Google Scholar] [CrossRef] [Green Version]
- Lv, H.; Liu, F.; Yuan, N. Drone Presence Detection by the Drone’s RF Communication. J. Phys. Conf. Ser. 2021, 1738, 12044. [Google Scholar] [CrossRef]
- Flórez, J.; Ortega, J.; Betancourt, A.; García, A.; Bedoya, M.; Botero, J.S. A review of algorithms, methods, and techniques for detecting UAVs and UAS using audio, radiofrequency, and video applications. TecnoLógicas 2020, 23, 262–278. [Google Scholar] [CrossRef]
- Kaplan, B.; Kahraman, İ.; Ektı, A.R.; Yarkan, S.; Görçın, A.; Özdemır, M.K.; Çirpan, H.A. Detection, Identification, and Direction of Arrival Estimation of Drone FHSS Signals with Uniform Linear Antenna Array. IEEE Access 2021, 9, 152057–152069. [Google Scholar] [CrossRef]
- Ezuma, M.; Erden, F.; Anjinappa, C.K.; Ozdemir, O.; Guvenc, I. Detection and Classification of UAVs Using RF Fingerprints in the Presence of Wi-Fi and Bluetooth Interference. IEEE Open J. Commun. Soc. 2019, 1, 60–76. [Google Scholar] [CrossRef]
- Zhang, H.; Cao, C.; Xu, L.; Gulliver, T.A. A UAV Detection Algorithm Based on an Artificial Neural Network. IEEE Access 2018, 6, 24720–24728. [Google Scholar] [CrossRef]
- Coluccia, A.; Parisi, G.; Fascista, A. Detection and Classification of Multirotor Drones in Radar Sensor Networks: A Review. Sensors 2020, 20, 4172. [Google Scholar] [CrossRef]
- Bouzayene, I.; Mabrouk, K.; Gharsallah, A.; Kholodnyak, D. Scan Radar Using an Uniform Rectangular Array for Drone Detection with Low RCS. In Proceedings of the 2019 IEEE 19th Mediterranean Microwave Symposium (MMS), Hammamet, Tunisia, 31 October–2 November 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Martinez, J.; Kopyto, D.; Schutz, M.; Vossiek, M. Convolutional Neural Network Assisted Detection and Localization of UAVs with a Narrowband Multi-site Radar. In Proceedings of the IEEE 19th Mediterranean Microwave Symposium (MMS), Hammamet, Tunisia, 31 October–2 November 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Tang, L.; Wang, H.; Feng, Z.; Xu, D.; Wang, Y.; Quan, S.; Xu, W. Small Phased Array Radar Based on AD9361 For UAV Detection. In Proceedings of the IEEE MTT-S International Microwave Biomedical Conference (IMBioC), Nanjing, China, 6–8 May 2019; pp. 1–3. [Google Scholar]
- Zhang, P.; Yang, L.; Chen, G.; Li, G. Classification of drones based on micro-Doppler signatures with dual-band radar sensors. In Proceedings of the Progress in Electromagnetics Research Symposium-Fall (PIERS-FALL), Singapore, 19–22 November 2017; pp. 638–643. [Google Scholar] [CrossRef]
- Zhao, J.; Fu, X.; Yang, Z.; Xu, F. Radar-Assisted UAV Detection and Identification Based on 5G in the Internet of Things. Wirel. Commun. Mob. Comput. 2019, 2019, 2850263. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Lu, X.; Dai, Z.; Yu, W.; Tan, K. A Cylindrical Phased Array Radar System for UAV Detection. In Proceedings of the 6th International Conference on Intelligent Computing and Signal Processing (ICSP), Xi’an, China, 9–11 April 2021; pp. 894–898. [Google Scholar]
- Huizing, A.; Heiligers, M.; Dekker, B.; de Wit, J.; Cifola, L.; Harmanny, R. Deep Learning for Classification of Mini-UAVs Using Micro-Doppler Spectrograms in Cognitive Radar. IEEE Aerosp. Electron. Syst. Mag. 2019, 34, 46–56. [Google Scholar] [CrossRef]
- Wang, L.; Tang, J.; Liao, Q. A Study on Radar Target Detection Based on Deep Neural Networks. IEEE Sens. Lett. 2019, 3, 1–4. [Google Scholar] [CrossRef]
- Chang, X.; Yang, C.; Wu, Z.; Wu, J. An Acoustic-Based Surveillance System for Amateur Drones Detection and Localization. IEEE Trans. Veh. Technol. 2020, 69, 2731–2739. [Google Scholar]
- Dumitrescu, C.; Minea, M.; Costea, I.M.; Chiva, I.C.; Semenescu, A. Development of an Acoustic System for UAV Detection †. Sensors 2020, 20, 4870. [Google Scholar] [CrossRef]
- Kartashov, V.; Oleynikov, V.; Koryttsev, I.; Sheiko, S.; Zubkov, O.; Babkin, S.; Selieznov, I. Use of acoustic signature for detection, recognition and direction finding of small unmanned aerial vehicles. In Proceedings of the IEEE 15th International Conference on Advanced Trends in Radioelectronics, Telecommunications and Computer Engineering (TCSET), Lviv-Slavske, Ukraine, 25–29 February 2020; pp. 1–4. [Google Scholar]
- Sedunov, A.; Haddad, D.; Salloum, H.; Sutin, A.; Sedunov, N.; Yakubovskiy, A. Stevens Drone Detection Acoustic System and Experiments in Acoustics UAV Tracking. In Proceedings of the IEEE International Symposium on Technologies for Homeland Security (HST), Woburn, MA, USA, 5–6 November 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Sedunov, A.; Salloum, H.; Sutin, A.; Sedunov, N. Long-term testing of acoustic system for tracking low-flying aircraft. In Proceedings of the IEEE International Symposium on Technologies for Homeland Security (HST), Woburn, MA, USA, 23–24 October 2018; pp. 1–6. [Google Scholar]
- Sedunov, A.; Salloum, H.; Sutin, A.; Sedunov, N.; Tsyuryupa, S. UAV passive acoustic detection. In Proceedings of the IEEE International Symposium on Technologies for Homeland Security (HST), Woburn, MA, USA, 23–24 October 2018; pp. 1–6. [Google Scholar]
- Utebayeva, D.; Almagambetov, A.; Alduraibi, M.; Temirgaliyev, Y.; Ilipbayeva, L.; Marxuly, S. Multi-label UAV sound classification using Stacked Bidirectional LSTM. In Proceedings of the 4th IEEE International Conference on Robotic Computing (IRC), Taichung, Taiwan, 9–11 November 2020; pp. 453–458. [Google Scholar]
- Yang, B.; Matson, E.T.; Smith, A.H.; Dietz, J.E.; Gallagher, J.C. UAV Detection System with Multiple Acoustic Nodes Using Machine Learning Models. In Proceedings of the 3rd IEEE International Conference on Robotic Computing (IRC), Naples, Italy, 25–27 February 2019; pp. 493–498. [Google Scholar] [CrossRef]
- Anwar, M.Z.; Kaleem, Z.; Jamalipour, A. Machine Learning Inspired Sound-Based Amateur Drone Detection for Public Safety Applications. IEEE Trans. Veh. Technol. 2019, 68, 2526–2534. [Google Scholar] [CrossRef]
- Seo, Y.; Jang, B.; Im, S. Drone Detection Using Convolutional Neural Networks with Acoustic STFT Features. In Proceedings of the 15th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Auckland, New Zealand, 27–30 November 2018; pp. 1–6. [Google Scholar]
- Blanchard, T.; Thomas, J.-H.; Raoof, K. Acoustic localization and tracking of a multi-rotor unmanned aerial vehicle using an array with few microphones. J. Acoust. Soc. Am. 2020, 148, 1456–1467. [Google Scholar] [CrossRef] [PubMed]
- Kartashov, V.; Oleynikov, V.; Zubkov, O.; Sheiko, S. Optical Detection of Unmanned Air Vehicles on a Video Stream in a Real-Time. In Proceedings of the International Conference on Information and Telecommunication Technologies and Radio Electronics (UkrMiCo), Odessa, Ukraine, 9–13 September 2019; pp. 1–4. [Google Scholar]
- Kim, B.H.; Khan, D.; Bohak, C.; Choi, W.; Lee, H.J.; Kim, M.Y. V-RBNN Based Small Drone Detection in Augmented Datasets for 3D LADAR System. Sensors 2018, 18, 3825. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Seidaliyeva, U.; Akhmetov, D.; Ilipbayeva, L.; Matson, E.T. Real-Time and Accurate Drone Detection in a Video with a Static Background. Sensors 2020, 20, 3856. [Google Scholar] [CrossRef] [PubMed]
- Siewert, S.B.; Andalibi, M.; Bruder, S.; Rizor, S. Slew-to-Cue Electro-Optical and Infrared Sensor Network for small UAS Detection, Tracking and Identification. In Proceedings of the AIAA Scitech Forum, San Diego, CA, USA, 7–11 January 2019; p. 2264. [Google Scholar]
- Stuckey, H.; Al-Radaideh, A.; Escamilla, L.; Sun, L.; Carrillo, L.G.; Tang, W. An Optical Spatial Localization System for Tracking Unmanned Aerial Vehicles Using a Single Dynamic Vision Sensor. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 3093–3100. [Google Scholar] [CrossRef]
- Thai, V.-P.; Zhong, W.; Pham, T.; Alam, S.; Duong, V. Detection, Tracking and Classification of Aircraft and Drones in Digital Towers Using Machine Learning on Motion Patterns. In Proceedings of the Integrated Communications, Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 9–11 April 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Jovanoska, S.; Knoedler, B.; Palanivelu, D.P.; Still, L.; Fiolka, T.; Oispuu, M.; Steffes, C.; Koch, W. Passive Sensor Processing and Data Fusion for Drone Detection. In Proceedings of the NATO STO Meeting Proceedings: MSG-SET-183 Specialists’ Meeting on Drone Detectability: Modelling the Relevant Signature, Prague, Czech Republic, 27–29 April 2021; p. 16. [Google Scholar]
- Daponte, P.; De Vito, L.; Picariello, F.; Rapuano, S.; Tudosa, I. Compressed Sensing Technologies and Challenges for Aerospace and Defense RF Source Localization. In Proceedings of the 5th IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Rome, Italy, 20–22 June 2018; pp. 634–639. [Google Scholar] [CrossRef]
- Yousef, M.; Iqbal, F. Drone forensics: A case study on a DJI Mavic Air. In Proceedings of the IEEE/ACS 16th International Conference on Computer Systems and Applications (AICCSA), Abu Dhabi, United Arab Emirates, 3–7 November 2019; pp. 1–3. [Google Scholar]
- Huang, X.; Yan, K.; Wu, H.C.; Wu, Y. Unmanned Aerial Vehicle Hub Detection Using Software-Defined Radio. In Proceedings of the IEEE International Symposium on Broadband Multimedia Systems and Broadcasting (BMSB), Jeju, Republic of Korea, 5–7 June 2019; pp. 1–6. [Google Scholar]
- Wang, Y.; Wang, W.; Zhang, X.; Wu, L.; Yin, H. The Joint Phantom Track Deception and TDOA/FDOA Localization Using UAV Swarm without Prior Knowledge of Radars’ Precise Locations. Electronics 2022, 11, 1577. [Google Scholar] [CrossRef]
- Zhao, Y.; Su, Y. The Extraction of Micro-Doppler Signal with EMD Algorithm for Radar-Based Small UAVs’ Detection. IEEE Trans. Instrum. Meas. 2019, 69, 929–940. [Google Scholar] [CrossRef]
- Choi, B.; Oh, D. Classification of Drone Type Using Deep Convolutional Neural Networks Based on Micro- Doppler Simulation. In Proceedings of the International Symposium on Antennas and Propagation (ISAP), Busan, Republic of Korea, 23–26 October 2018; pp. 1–2. [Google Scholar]
- Kim, B.K.; Kang, H.-S.; Park, S.-O. Drone Classification Using Convolutional Neural Networks with Merged Doppler Images. IEEE Geosci. Remote. Sens. Lett. 2016, 14, 38–42. [Google Scholar] [CrossRef]
- Mazumder, J.; Raj, A.B. Detection and Classification of UAV Using Propeller Doppler Profiles for Counter UAV Systems. In Proceedings of the5th International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, 10–12 June 2020; pp. 221–227. [Google Scholar] [CrossRef]
- Li, S.; Chai, Y.; Guo, M.; Liu, Y. Research on Detection Method of UAV Based on micro-Doppler Effect. In Proceedings of the 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020. [Google Scholar] [CrossRef]
- Oh, B.-S.; Guo, X.; Wan, F.; Toh, K.-A.; Lin, Z. Micro-Doppler Mini-UAV Classification Using Empirical-Mode Decomposition Features. IEEE Geosci. Remote. Sens. Lett. 2017, 15, 227–231. [Google Scholar] [CrossRef]
- Ren, J.; Jiang, X. Regularized 2-D complex-log spectral analysis and subspace reliability analysis of micro-Doppler signature for UAV detection. Pattern Recognit. 2017, 69, 225–237. [Google Scholar] [CrossRef]
- Basak, S.; Scheers, B. Passive radio system for real-time drone detection and DoA estimation. In Proceedings of the International Conference on Military Communications and Information Systems (ICMCIS), Warsaw, Poland, 22–23 May 2018; pp. 1–6. [Google Scholar]
- Solomitckii, D.; Gapeyenko, M.; Semkin, V.; Andreev, S.; Koucheryavy, Y. Technologies for Efficient Amateur Drone Detection in 5G Millimeter-Wave Cellular Infrastructure. IEEE Commun. Mag. 2018, 56, 43–50. [Google Scholar] [CrossRef]
- Han, S.; Huang, Y.; Meng, W.; Li, C.; Xu, N.; Chen, D. Optimal Power Allocation for SCMA Downlink Systems Based on Maximum Capacity. IEEE Trans. Commun. 2018, 67, 1480–1489. [Google Scholar] [CrossRef]
- Han, S.; Zhang, Y.; Meng, W.; Chen, H.-H. Self-Interference-Cancelation-Based SLNR Precoding Design for Full-Duplex Relay-Assisted System. IEEE Trans. Veh. Technol. 2018, 67, 8249–8262. [Google Scholar] [CrossRef]
- Chiper, F.-L.; Martian, A.; Vladeanu, C.; Marghescu, I.; Craciunescu, R.; Fratu, O. Drone Detection and Defense Systems: Survey and a Software-Defined Radio-Based Solution. Sensors 2022, 22, 1453. [Google Scholar] [CrossRef] [PubMed]
- Siva, J.; Poellabauer, C. Robot and Drone Localization in GPS-Denied Areas. In Mission-Oriented Sensor Networks and Systems: Art and Science; Springer: Berlin/Heidelberg, Germany, 2019; pp. 597–631. [Google Scholar] [CrossRef]
- Sinha, P.; Yapici, Y.; Guvene, I.; Turgut, E.; Gursoy, M.C. RSS-Based Detection of Drones in the Presence of RF Interferers. In Proceedings of the IEEE 17th Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 10–13 January 2020; pp. 1–6. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Detection Technologies | Ref. | |
|---|---|---|
| UAV Architecture and Security Concerns | [3,4,5,6,7,8] | |
| UAE Detection Technologies | RF | [7,8,9,10,11,12,13,14,15,16,17,18,19,20] |
| Radar | [21,22,23,24,25,26,27,28,29] | |
| Acoustic | [30,31,32,33,34,35,36,37,38,39,40] | |
| Electro-optical | [41,42,43,44,45,46] | |
| Hybrid fusion | [40,41,47,48] | |
| Controller Detection and Localization | [12,18,49,50] | |
| Ref. | Operating Frequency | Functionalities | Performance | ||
|---|---|---|---|---|---|
| Identification | Classification | Localization/ Tracking | |||
| [7] | 2.4 GHz | √ | √ | - | Average of 97% |
| [8] | 2.4 GHz | √ | √ | - | Greater than 96% |
| [9] | 2.4 GHz | √ | √ | - | Average of 96.3% |
| [11] | 20 MHz–6 GHz | √ | - | √ | - |
| [13] | 1–6 GHz | √ | √ | - | Average of 99% |
| [10] | 2.401–2.481 GHz | √ | √ | √ | - |
| [16] | 2.4 GHz and 5.8 GHz ISM bands | √ | - | - | - |
| [12] | 2.4 GHz | √ | - | √ | - |
| [18] | 2.4 GHz ISM band | √ | - | √ | - |
| Ref. | Detection Technique | Specifications | Functionalities | Performance | ||
|---|---|---|---|---|---|---|
| Identification | Classification | Localization/ Tracking | ||||
| [21] | FMCW/CW radar | Doppler effect principle | √ | - | - | NA |
| [55] | CW radar | C and X frequency bands, Micro Doppler principle | √ | √ | - | - |
| [56] | CW radar | Operating frequency: 35 GHz | √ | √ | - | Accuracy 85% |
| [27] | Cylindrical phased array radar | Operating frequency: C band | √ | - | √ | Performed well under a strong cluttered environment |
| [24] | Small phased array radar | Based on AD9361 | √ | - | √ | Reliable and stabile |
| [22] | Rectangular phased array radar | Operating frequency: X band | √ | - | - | Mixed up with birds |
| [26] | 5G millimeter wave radar | Starting frequency is 25 GHz, which is in the 5G band | √ | - | √ | Detected at 300 m with a speed of 157.9 r/s & at 850.2 m with a speed of 88 r/s |
| Ref. | Detection Technique | Functionalities | Performance | ||
|---|---|---|---|---|---|
| Identification | Classification | Localization/ Tracking | |||
| [30] | Designed for Amateur Drones (200 Hz), SVM (Drone sound identification) | √ | - | √ | High accuracy |
| [36] | BiLSTM (UAV sound classification) | √ | √ | - | UAV sounds 94.02% |
| [31] | Concurrent Neural Networks | √ | - | - | 96.3% |
| [35] | TDoA, SRP-PHAT | √ | - | √ | SRP-PHAT outperform TDoA |
| [32] | - | √ | - | √ | - |
| [37] | MFCC, STFT, CNN, SVM | √ | - | √ | Noise affects the detection |
| [33] | SRP-PHAT | √ | - | √ | Drone classification algorithm to be improved according to distance |
| [34] | SRP-PHAT | √ | - | √ | - |
| Ref. | Detection Technique | Functionalities | Performance | ||
|---|---|---|---|---|---|
| Identification | Classification | Localization/ Tracking | |||
| [42] | 3D LADAR sensor, 3D background subtraction, V-RBNN | √ | - | √ | Detection Range 2 km |
| [44] | Combination of: EO/IR, All-sky, and acoustic cues | √ | - | √ | Line of sight limitation |
| [41] | Real stream detection, Differential method | √ | - | √ | - |
| [45] | DVS camera, Temporal filtering, Triangulation | √ | - | √ | Accurate Detection range 30 m |
| [43] | Background subtraction, CNN’s | √ | - | - | Moving Background dependency |
| Detection Technique | Summary | Limitations | Ref. |
|---|---|---|---|
| Radio Frequency | Real-time analysis for the detected radio communication between UAV and its controller. However, it does not apply to autonomous UAV detection. Low cost and simple architecture and elements: Antennas, Processors, RF sensors. Power and sensitivity of each affect detection system performance and accuracy. Common frequency bands are around 2.4 and 5 GHz Covering a long detection range will perform more efficiently in the less congested RF zones. Referring to RF datasets and integrating with machine learning algorithms are advanced ways to enhance detection, localization, and precise classification. | The RF-based detection technique applies only if the UAV is remotely controlled. | [7,8,9,10,11,12,13,14,15,16,17,18,19,20] |
| Radar | Transmitting radio signals, then receiving and analyzing the reflection/backscattering/echo radar signals. UAV’s detection, tracking (Doppler-based), classification, and localization are based on the analysis of the reflected radio signal. Active sensor (Radar) and data processing modules with high-range detection and accurate localization. Machine learning algorithms and techniques’ integration for better performance and results. Less noise and applicable in different weather conditions (fog, dust, rain, etc.). UAVs with small radar cross-sections are difficult to be identified and classified. | UAVs generally have limited Radar Cross Sections similar to birds or pedestrians. The amount of false positives remains high and low-RCS limits the detection range of the radar, especially X-band Radars. | [21,22,23,24,25,26,27,28,29] |
| Acoustic | Analyze acoustic signals coming from UAV’s engine or propeller blades. Acoustic sensors/microphones arrays combined with data acquisition and signal processing modules Acoustic fingerprint analysis, features extraction, classification, and localization UAV’s identification and distinction from other objects Effective in a short distance, however, it’s affected by the nearby noise sources and weather. Acoustic dataset and Machine learning techniques integration for higher performance (detection and classification). | The detection of acoustic noise emitted by UAVs is low; thus, the acoustic technique requires a network of sensors deployed around sensitive places. | [30,31,32,33,34,35,36,37,38,39,40] |
| Electro-optic | Imaging and motion line of sight detection. High-cost equipment Ability to track autonomous UAVs. Controlling false alarms with advanced integration with other methods/algorithms/machine learning. Detection performance can vary with different environmental conditions and weather. | Using different electro-optics is required, and the fusion of video streams is required to cope with UAVs’ environment and type/size. This increases the cost of the solution. | [41,42,43,44,45,46] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yousaf, J.; Zia, H.; Alhalabi, M.; Yaghi, M.; Basmaji, T.; Shehhi, E.A.; Gad, A.; Alkhedher, M.; Ghazal, M. Drone and Controller Detection and Localization: Trends and Challenges. Appl. Sci. 2022, 12, 12612. https://doi.org/10.3390/app122412612
Yousaf J, Zia H, Alhalabi M, Yaghi M, Basmaji T, Shehhi EA, Gad A, Alkhedher M, Ghazal M. Drone and Controller Detection and Localization: Trends and Challenges. Applied Sciences. 2022; 12(24):12612. https://doi.org/10.3390/app122412612
Chicago/Turabian StyleYousaf, Jawad, Huma Zia, Marah Alhalabi, Maha Yaghi, Tasnim Basmaji, Eiman Al Shehhi, Abdalla Gad, Mohammad Alkhedher, and Mohammed Ghazal. 2022. "Drone and Controller Detection and Localization: Trends and Challenges" Applied Sciences 12, no. 24: 12612. https://doi.org/10.3390/app122412612
APA StyleYousaf, J., Zia, H., Alhalabi, M., Yaghi, M., Basmaji, T., Shehhi, E. A., Gad, A., Alkhedher, M., & Ghazal, M. (2022). Drone and Controller Detection and Localization: Trends and Challenges. Applied Sciences, 12(24), 12612. https://doi.org/10.3390/app122412612