3.1. Pre-Processing of Train, Validation, and Test Data Using the Signal Processing Method
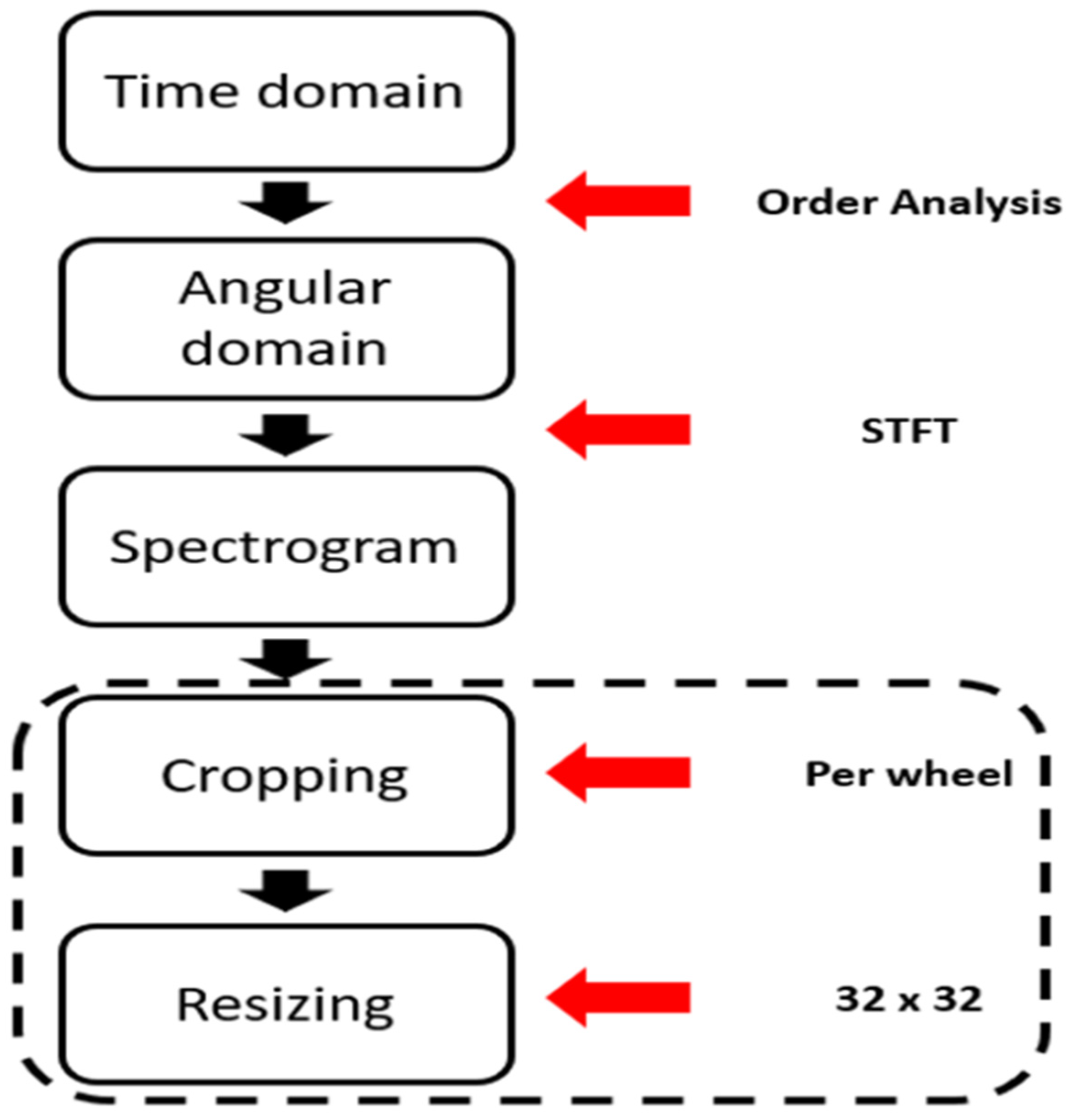
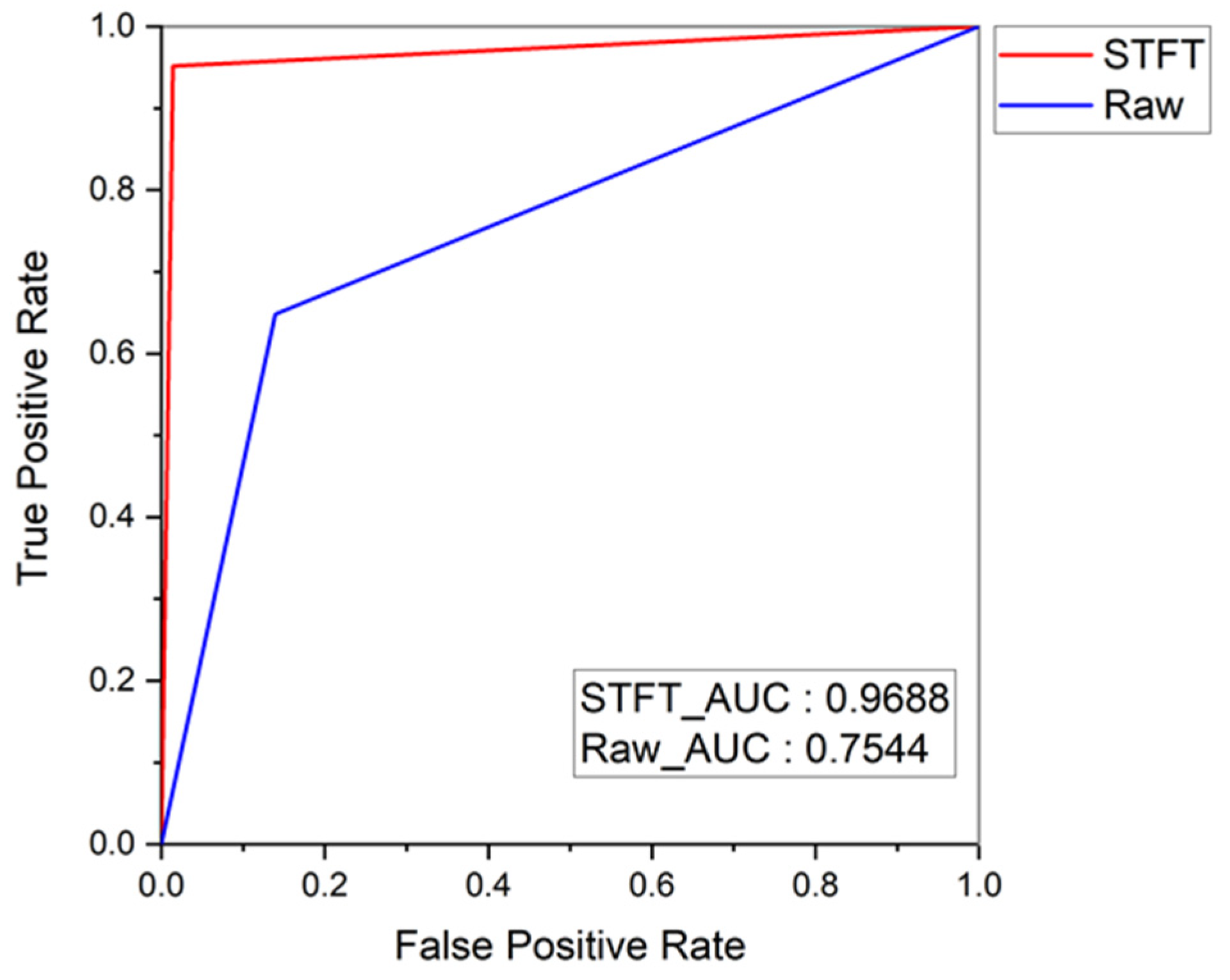
Deep learning results of data with and without signal processing application were compared. In this study, two signal processing methods, order analysis and STFT were used.
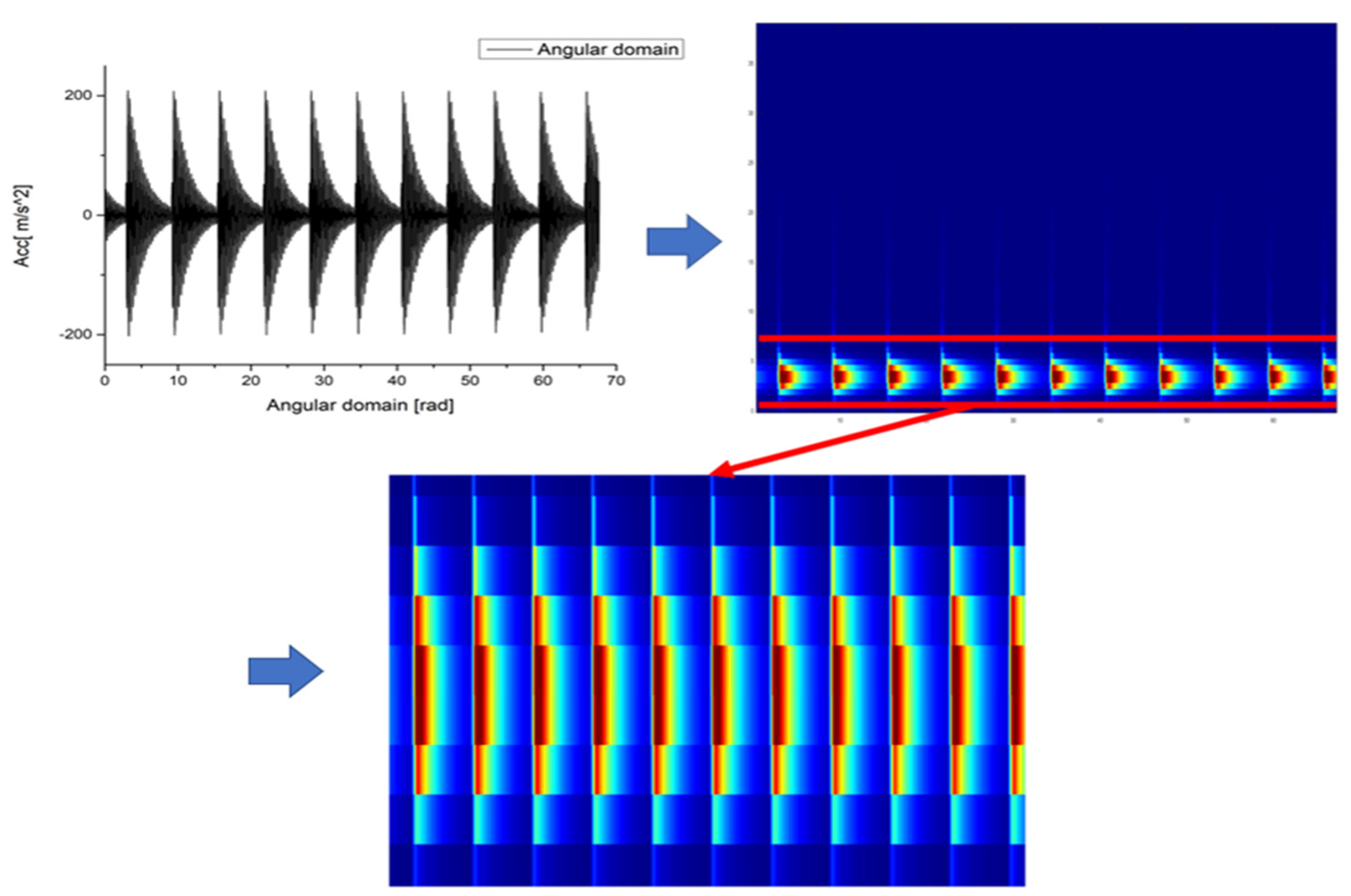
First, order analysis was used in the time domain. In this paper, order analysis is defined as the number of events occurring per unit rotation. Order analysis requires changing the signal to the angular domain before performing FFT of the time domain data [
22]. For this reason, order analysis is used to prevent changes in frequency components in a rotating device with varying rotational speeds [
23]. Since railway vehicles have various speed changes while driving, it is more useful to convert from the time domain to the angular domain. The tachometer in railway vehicles is always attached to the axle box to measure the rotational speed of the wheelset, which has the advantage of eliminating the need for additional device configuration to convert to the angular domain.
Figure 12. shows the conversion of the flat signal from the time domain to an angular domain.
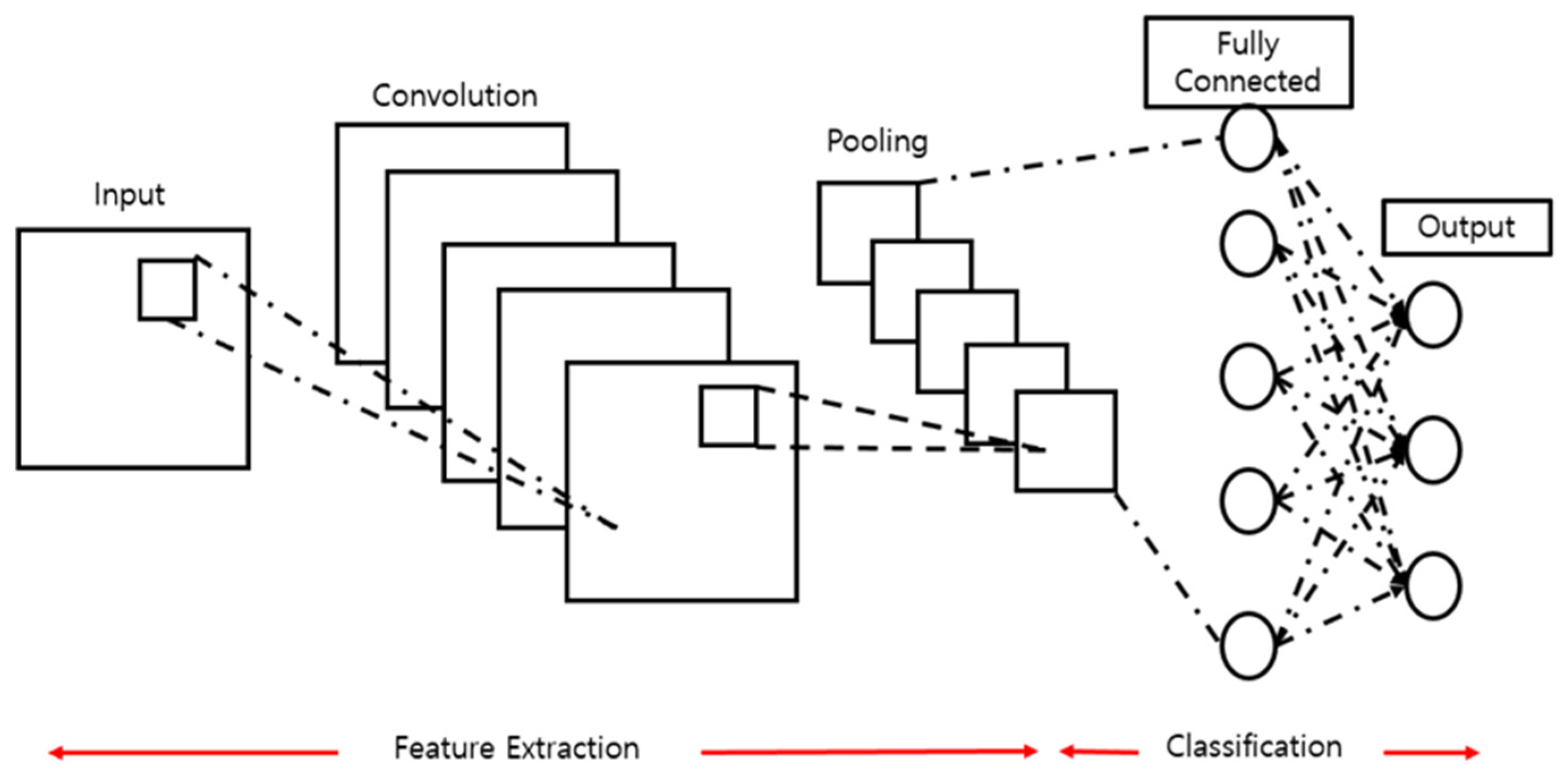
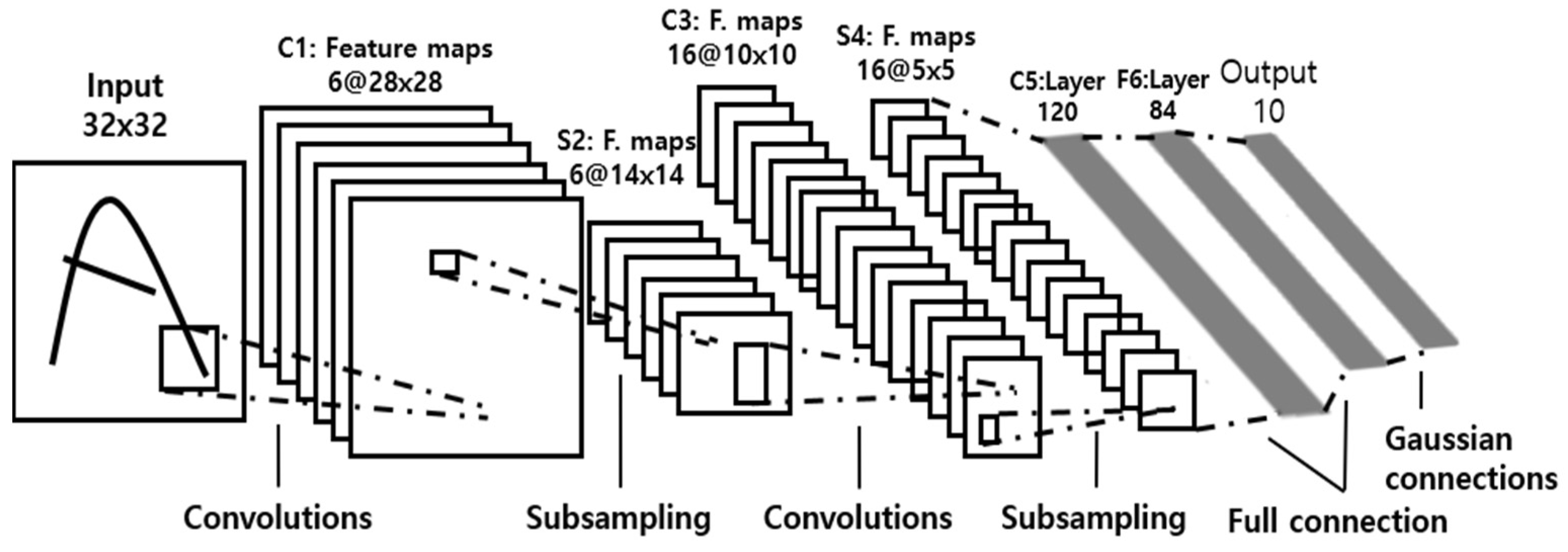
Second, STFT was used since the deep learning algorithm used in this paper is CNN, and CNN is an algorithm suitable for image and video processing, the spectrogram image obtained by STFT was used as learning data.
STFT, along with FFT, is one of the most popular analysis methods in the field of noise and vibration analysis [
24]. Although the FFT cannot make the frequency change information over time, the STFT can confirm the frequency change information over time by supplementing the disadvantage of the FFT.
Figure 13 shows the difference between the STFT and the FFT, where the frequency components of 10 Hz, 20 Hz, and 30 Hz reprinted from ref. [
17]. However, as described above, the frequency change according to time elapse could not be visualized through the FFT. This is the second reason for choosing STFT in this paper.
However, there are additional variables to be considered in order to prepare pre-process data that is suitable for deep learning in STFT analysis. First of all, we should consider that the result is different depending on the window function. The analysis results according to the window function were compared. Before comparison, only the frequency band due to wheel flats was set using the Y-Limit function in Matlab, as shown in
Figure 14 [
25].
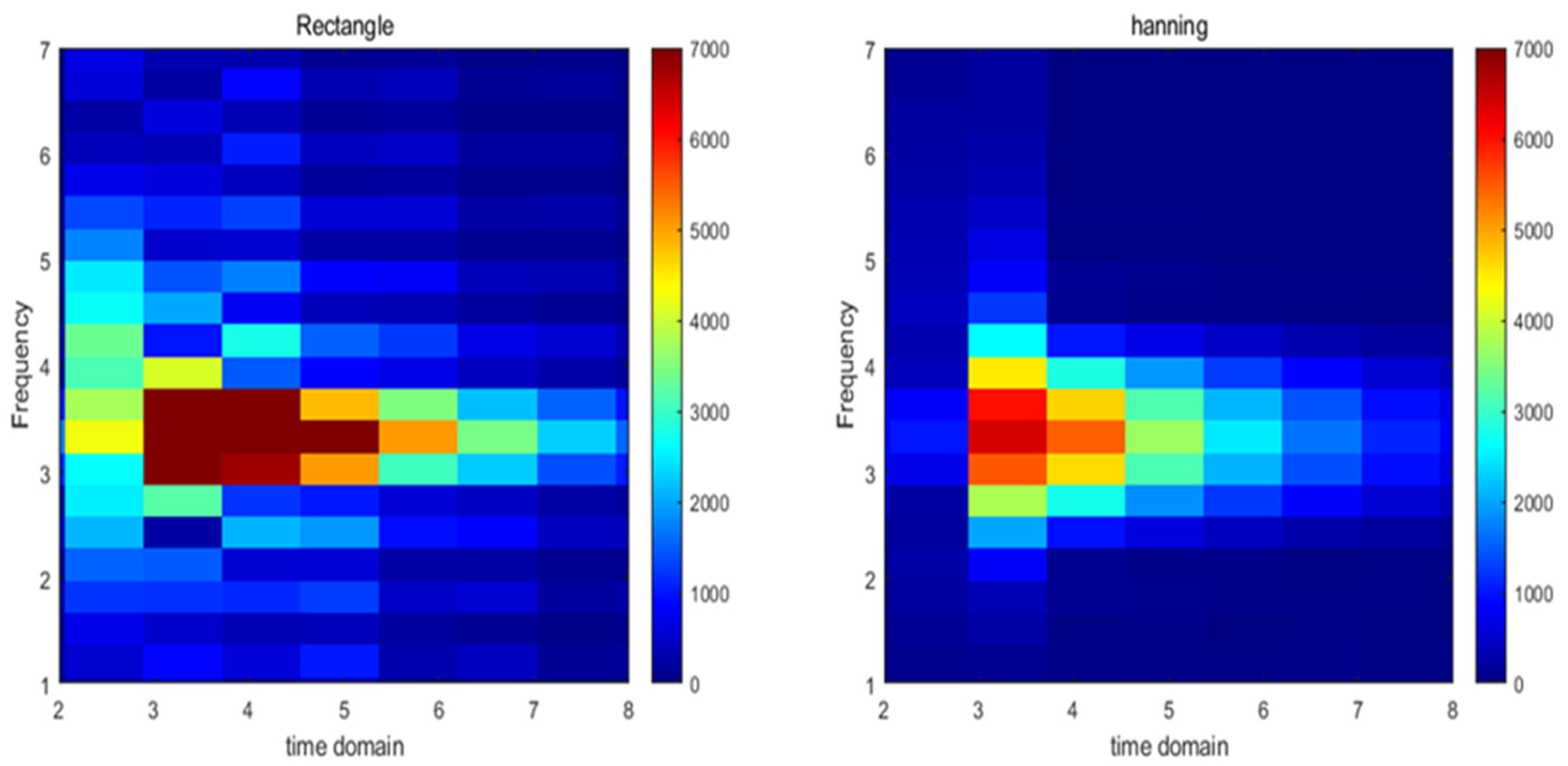
For the window function, both the Rectangular function and Hanning function were compared. At this time, the comparison was made using the data of one flat per wheel. The result is shown in
Figure 15. This result shows that the Hanning window is more appropriate because of precise resolution.
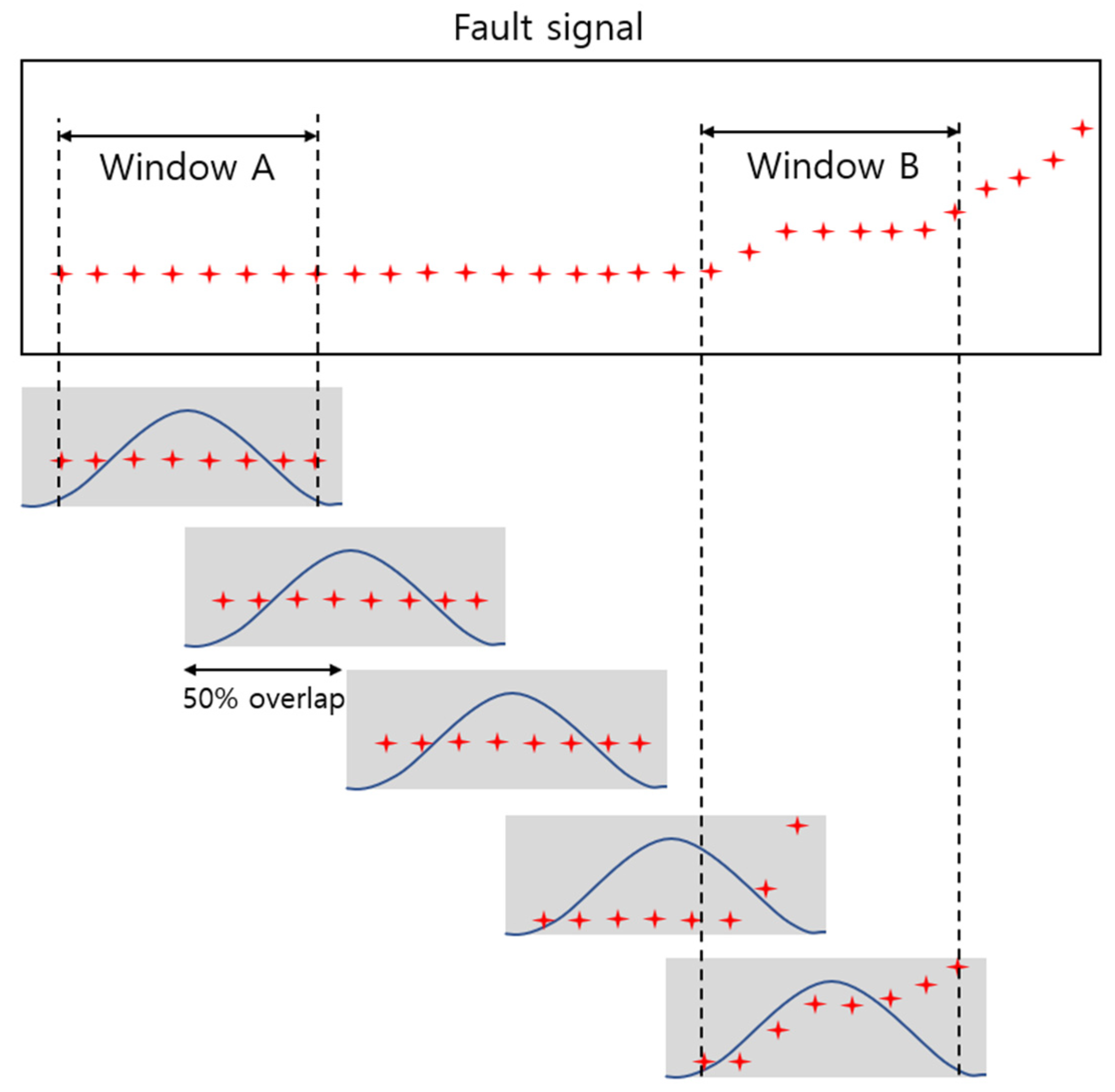
As a second consideration, it is shown that both the frequency and the time resolution vary according to the window length. For example, if the window length is increased, the frequency resolution is improved, but the time resolution degrades. Thus, it should be properly adjusted for the purpose of analysis. However, there is a way to adjust the overlap to alleviate these shortcomings using the concept of overlap shown in
Figure 16 [
26]. It means that when windows are applied, the windows overlap each other.
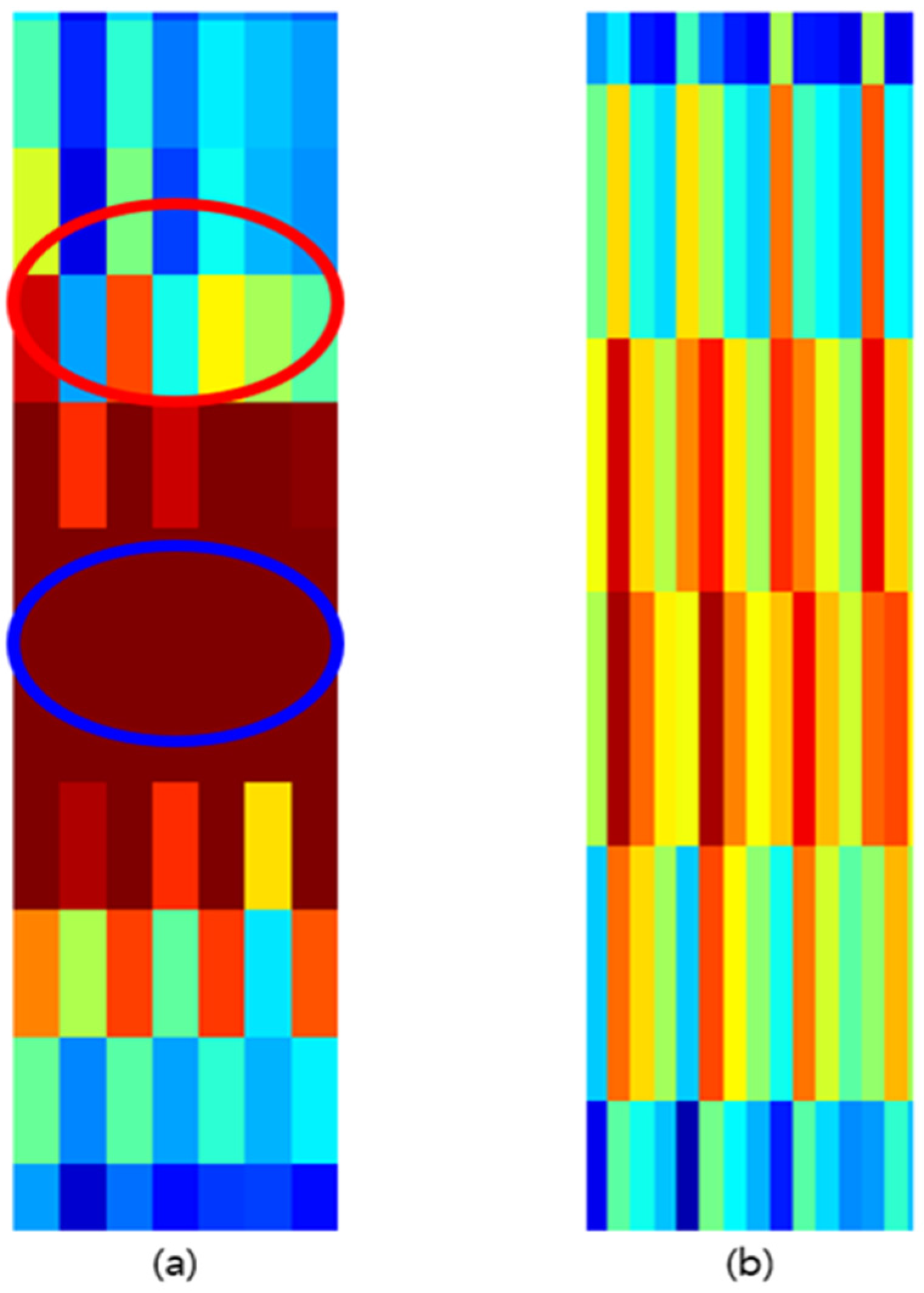
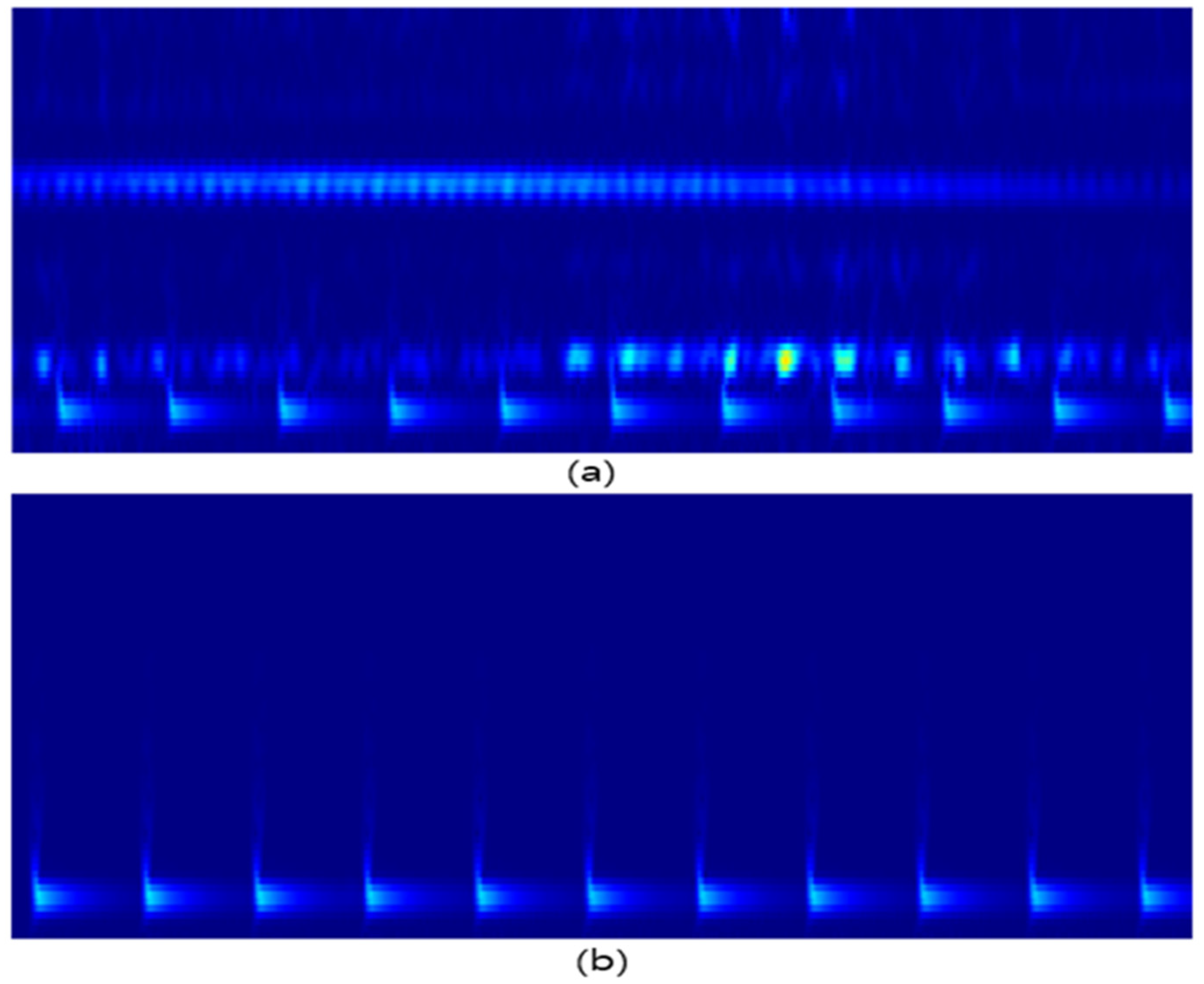
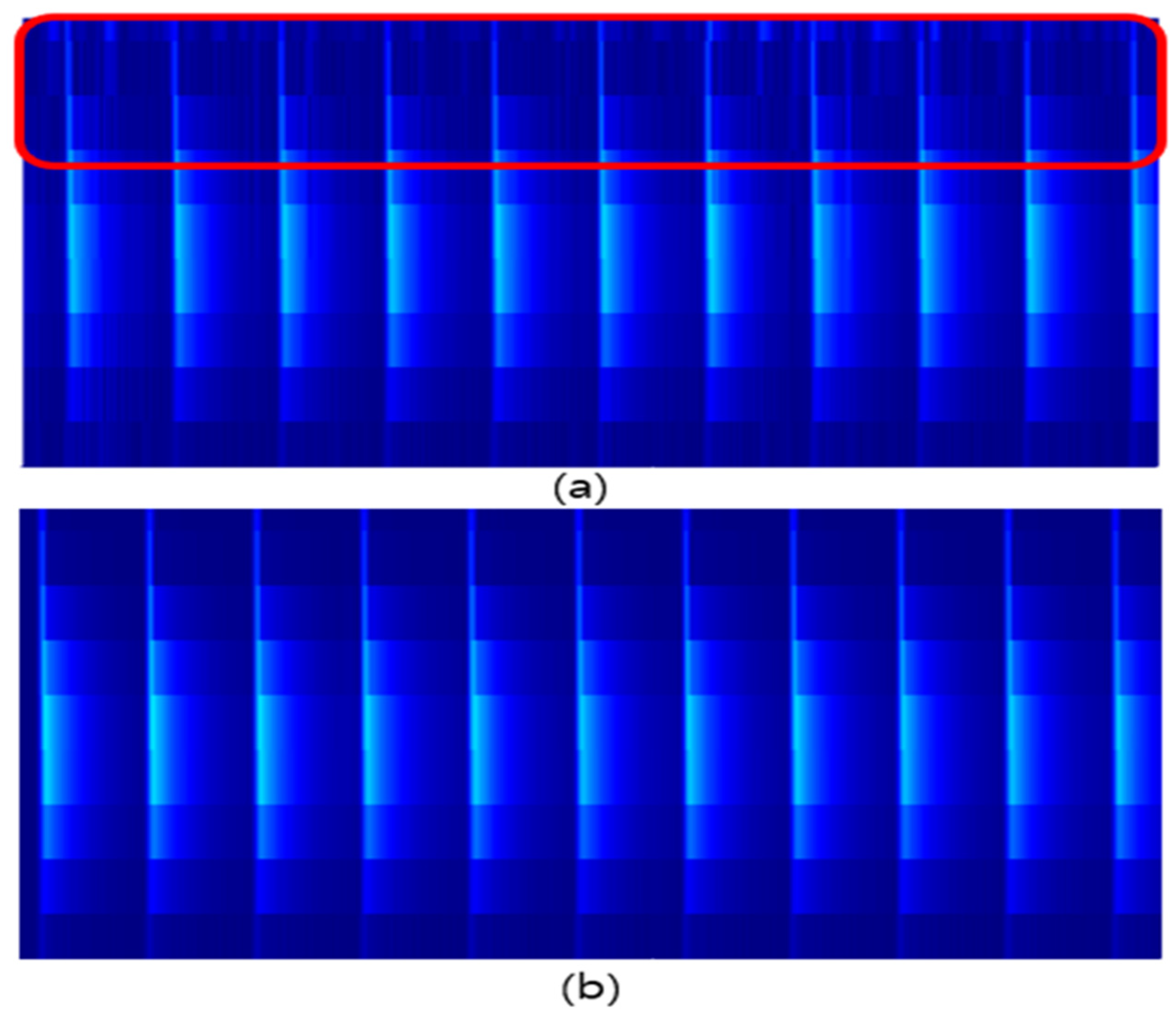
In order to find the window length suitable for this study, the window length was incrementally changed and compared. The data of four wheel flats with window lengths of 128 and 64, respectively, were compared, and the results are shown in
Figure 17. As a result of the analysis, it was judged that it was more appropriate to set the window length to 64. For this reason, as shown in
Figure 17a, it was not possible to clearly confirm that there were four flat signals in the red and blue circles when compared to (b). Therefore, it was found that as the number of wheel flats increased, the time resolution became more important.
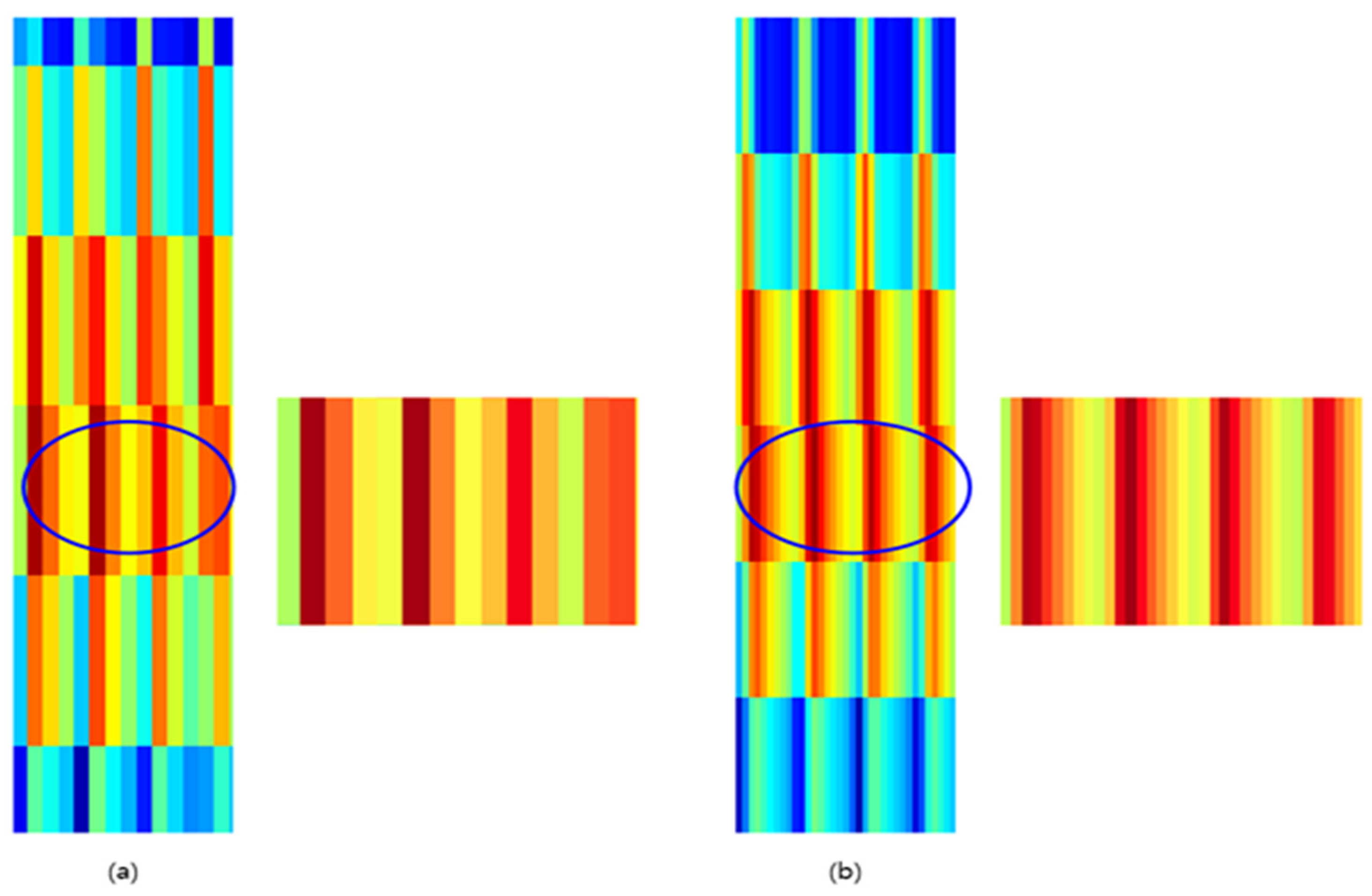
Finally,
Figure 18 shows the result of the difference in overlap when the window length is the same as 64. At this time, the cases of overlap 50% and 80% were compared. In addition, the motivation for the comparison with 80% overlap is as follows. First of all, an increase of 10% overlap each from 50% were reviewed. It was confirmed that the case of four wheel flats from 80% overlap is better. Therefore, the cases with 50% and 80% were compared. As a result, it was decided that it is appropriate to set it to 80% as shown in (b) of
Figure 18. The reason is that it shows more clearly in four wheel flats in (b) than in (a).
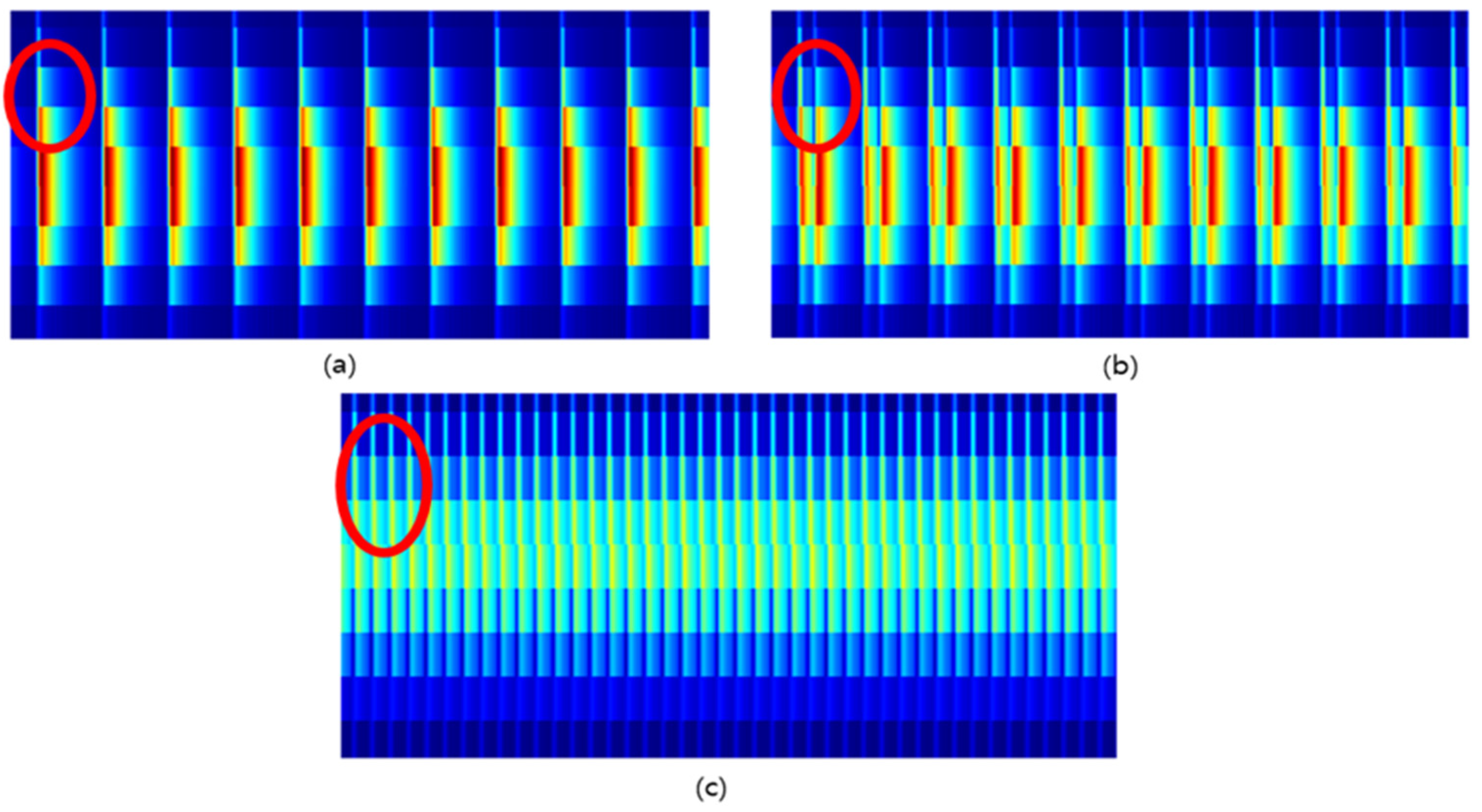
The following parameter values were selected through comparative analysis; First, the window length of 64, the overlap of 80%, and Hanning were used for window function. The final parameter values are summarized in
Table 5, and the final results of applying both order analysis and STFT are shown in
Figure 19.
3.2. A Flat Signal Overlapped with a Noise Signal
Since it is difficult to obtain data from the driving rail vehicles with wheel flats, the noise signals of normal wheels obtained in past research [
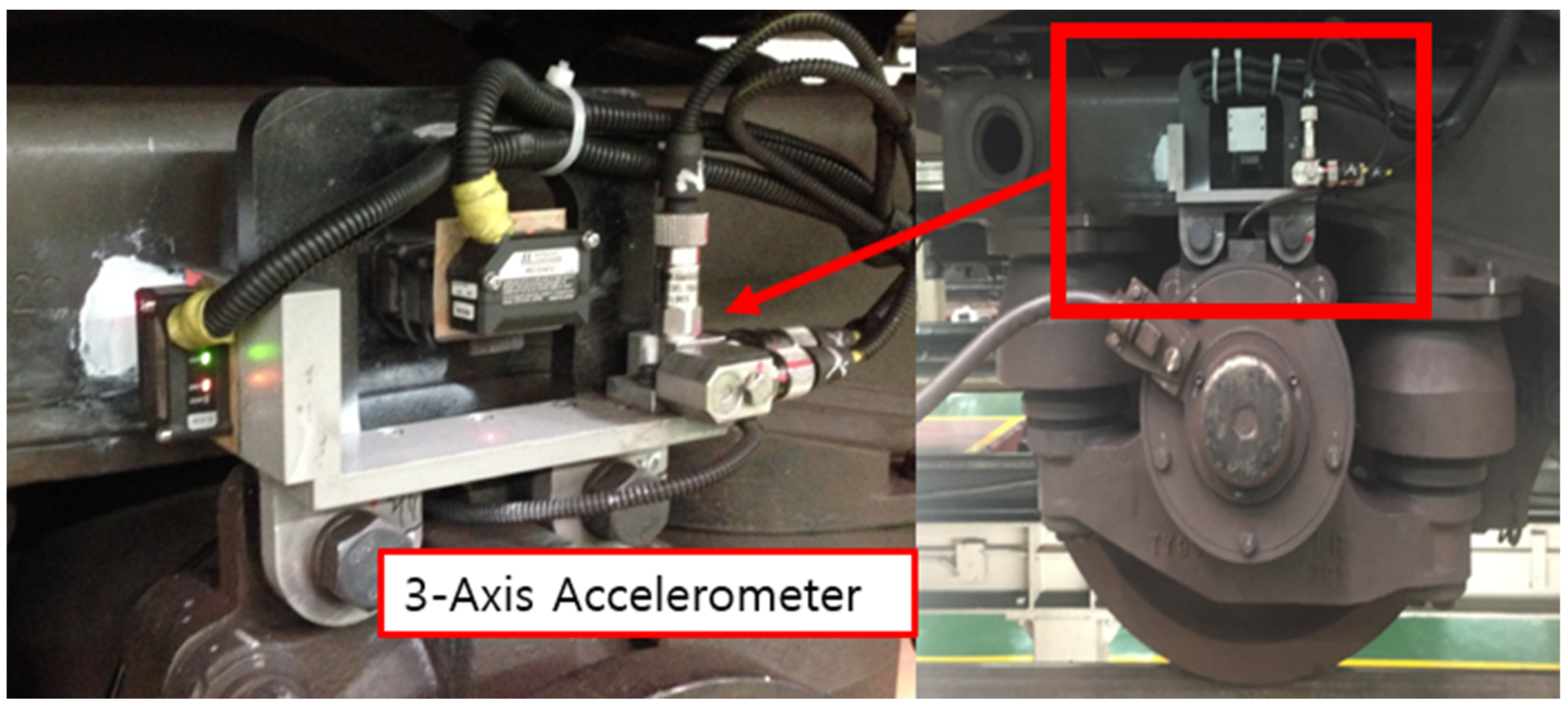
17] were overlapped with the simulation flat signals. The noise signals of normal wheels were obtained on the axle box using the Seoul Metro Line 7 vehicle.
Figure 20 shows the location of the measuring equipment mounted on the axle box.
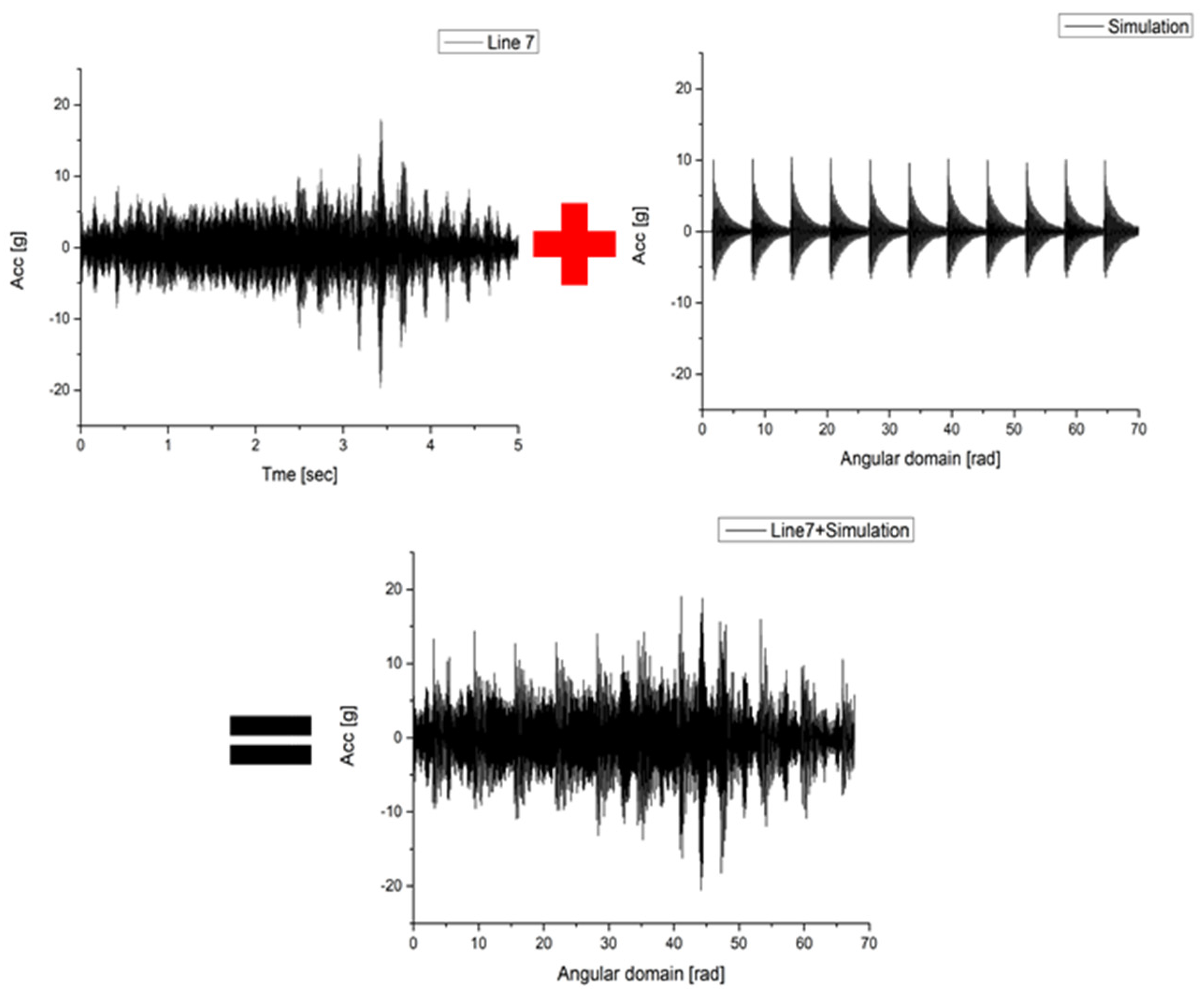
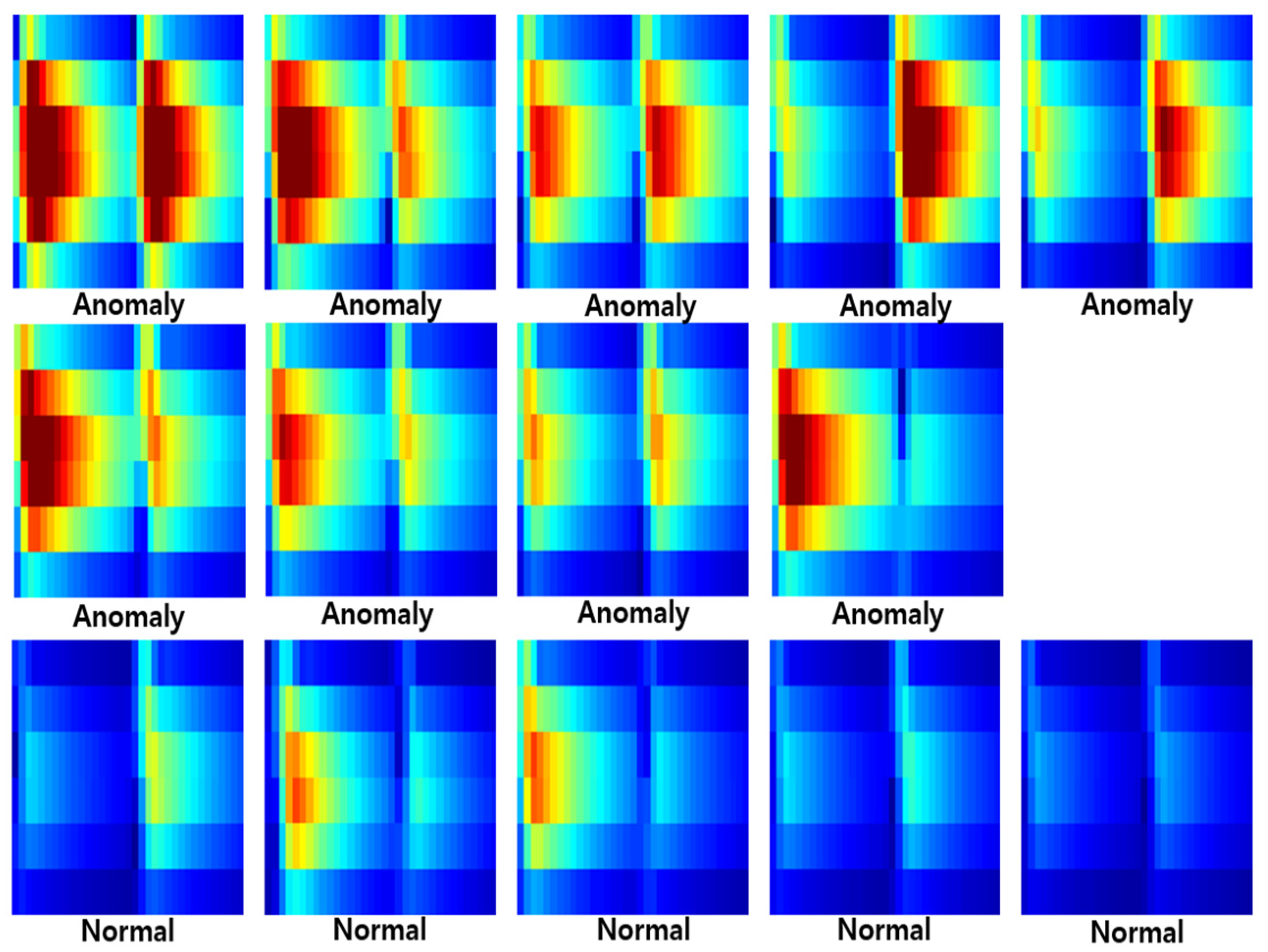
Among the overlapped data section, the data of the most severe noise section was applied, and the overlapped result is shown in
Figure 21. If the wheel flat size is small, the flat signal (Time-domain) is fully covered by the noise signal. It was found that it is difficult to determine the presence or absence of any small flat signal.
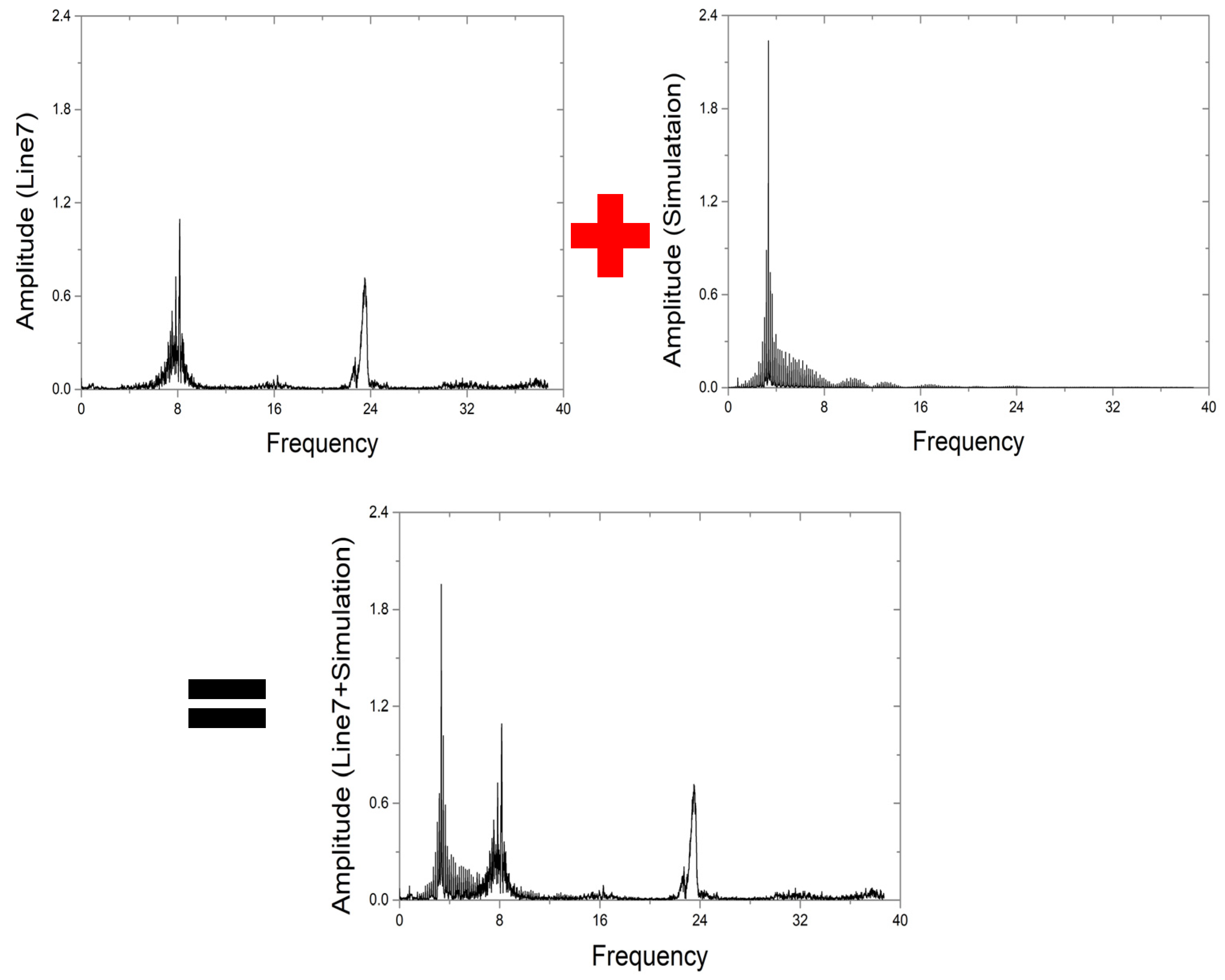
Figure 22 and
Figure 23 show the FFT and STFT of the signal overlapped on the noise signal. As a result of the analysis, it was found that the frequency band by the flat signal was relatively low compared to the frequency band by the noise signal, and thus, it was confirmed that the frequency bands are separate from each other.
Therefore, as a result of minimizing the influence of the noise signal by cropping only the frequency band indicated by the flats, it was confirmed that only a slight difference appears in the red square shown in
Figure 24.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




























