
Waveguide Structure Design and Simulation for High-Temperature Corrosion Thickness Detection

Abstract
:Featured Application
Abstract
1. Introduction
2. Computational Methods
3. Results and Discussion
3.1. Temperature Field
3.1.1. Temperature Field of Waveguide Rods with Different Materials
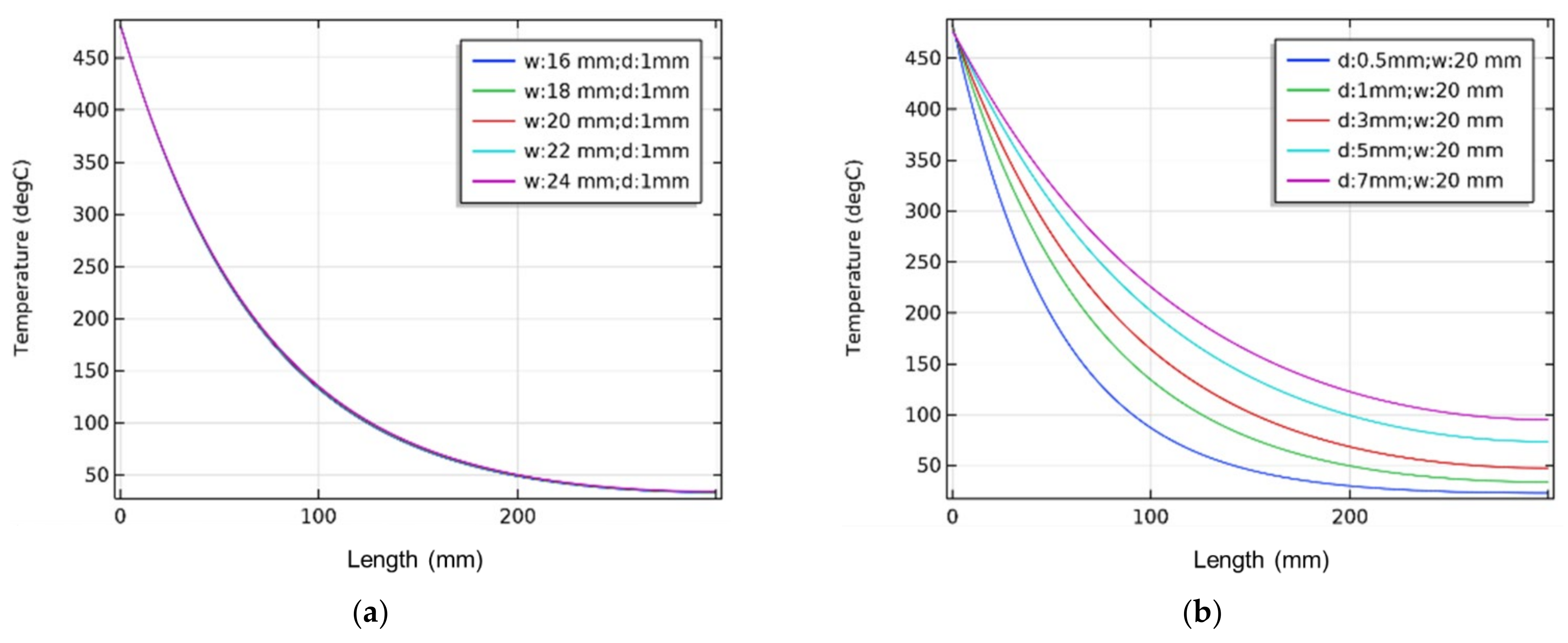
3.1.2. Temperature Field of Waveguide Rods with Different Sizes
3.2. Ultrasonic Fields
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Liu, S. Oil and gas pipeline corrosion detection technology development status study. Pet. Petrochem. Mater. Procure. 2021, 6, 66–67. [Google Scholar]
- Zhang, Q.; Wu, X. Wall thinning assessment for ferromagnetic plate with pulsed eddy current testing using analytical solution decoupling method. Appl. Sci. 2021, 11, 4356. [Google Scholar] [CrossRef]
- Yang, L.; Guo, X.; Xu, C.; Song, H.; Song, Y.; Zhu, H.; Wang, Y. Design and validation of three-axis high definition magnetic flux leakage detection robot for oil/gas pipelines. Adv. Intell. Syst. Comput. 2020, 1060, 281–289. [Google Scholar]
- Liu, B.; He, L.; Zhang, H.; Cao, Y.; Fernandes, H. The axial crack testing model for long distance oil-gas pipeline based on magnetic flux leakage internal inspection method. Measurement 2017, 103, 275–282. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Tan, X.; Zheng, P. Non-destructive detection of wire rope discontinuities from residual magnetic field images using the hilbert-huang transform and compressed sensing. Sensors 2017, 17, 608. [Google Scholar] [CrossRef] [Green Version]
- Mohseni, E.; Habibzadeh Boukani, H.; Ramos França, D.; Viens, M. A study of the automated eddy current detection of cracks in steel plates. J. Nondestruct. Eval 2019, 39, 6. [Google Scholar] [CrossRef] [Green Version]
- Yakimov, E.; Galtseva, O.; Ustyugov, D. Thickness measuring of electroconductive pipe walls using the dual-frequency eddy-current method. J. Phys. Conf. Ser. 2017, 783, 12061. [Google Scholar] [CrossRef]
- Siqueira, M.H.S.; Gatts, C.E.N.; da Silva, R.R.; Rebello, J.M.A. The use of ultrasonic guided waves and wavelets analysis in pipe inspection. Ultrasonics 2004, 41, 785–797. [Google Scholar] [CrossRef]
- Shin, E.; Kang, B.; Chang, J. Real-time hifu treatment monitoring using pulse inversion ultrasonic imaging. Appl. Sci. 2018, 8, 2219. [Google Scholar] [CrossRef] [Green Version]
- Wilcox, P.; Evans, M.; Pavlakovic, B.; Alleyne, D.; Vine, K.; Cawley, P.; Lowe, M. Guided wave testing of rail. Insight Non-Destr. Test. Cond. Monit 2003, 45, 413–420. [Google Scholar] [CrossRef]
- Fromme, P.; Wilcox, P.D.; Lowe, M.J.S.; Cawley, P. On the development and testing of a guided ultrasonic wave array for structural integrity monitoring. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2006, 53, 777–785. [Google Scholar] [CrossRef] [Green Version]
- Lugovtsova, Y.; Bulling, J.; Boller, C.; Prager, J. Analysis of guided wave propagation in a multi-layered structure in view of structural health monitoring. Appl. Sci. 2019, 9, 4600. [Google Scholar] [CrossRef]
- Diamanti, K.; Soutis, C. Structural health monitoring techniques for aircraft composite structures. Prog. Aerosp. Sci. 2010, 46, 342–352. [Google Scholar] [CrossRef]
- Gao, H. Ultrasonic Guided Wave Mechanics for Composite Material Structural Health Monitoring. Ph.D. Thesis, Pennsylvania State University, State College, PA, USA, 2007. [Google Scholar]
- Chillara, V.K.; Lissenden, C.J. Analysis of second harmonic guided waves in pipes using a large radius asymptotic approximation for axis-symmetric longitudinal modes. Ultrasonics 2013, 53, 862–869. [Google Scholar] [CrossRef]
- Jhang, K. Nonlinear ultrasonic techniques for nondestructive assessment of micro damage in material: A review. Int. J. Precis. Eng. Manuf. 2009, 10, 123–135. [Google Scholar] [CrossRef]
- Li, Y.M.; Cheng, L.; Gu, X.Y.; Zhang, Y.P.; Liao, R.H. Progress in research of high curie temperature piezoelectric ceramics. J. Ceram. 2006, 27, 309–315. [Google Scholar]
- Liu, J.K. Current development of piezoelectric materials with high curie temperature. Piezoelectric Acoustooptics 2012, 34, 100–105. [Google Scholar]
- Billson, D.R.; Edwards, C.; Rohani, M.S.; Palmer, S.B. Wall thickness measurements in hot steel pipe using non-contact ultrasound. In Review of Progress in Quantitative Nondestructive Evaluation; Thompson, D.O., Chimenti, D.E., Eds.; Springer: New York, NY, USA, 1996; Volume 15A, pp. 2281–2287. [Google Scholar]
- Li, J.H.; Zhang, Y.C.; Di, Y.L.; Gao, B.J. Ultrasonic thickness measurement method for high pressure and temperature tube by waveguide bar. Nondestruct. Test. 2009, 31, 593–595. [Google Scholar]
- Cegla, F.B.; Cawley, P.; Allin, J.; Davies, J. High-temperature (>500 °C) wall thickness monitoring using dry-coupled ultrasonic waveguide transducers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2011, 58, 156–167. [Google Scholar] [CrossRef]
- Gao, H.; Rose, J.L. Ice detection and classification on an aircraft wing with ultrasonic shear horizontal guided waves. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2009, 56, 334–344. [Google Scholar]
- Wang, G.; Li, F.X. On-line monitoring of high temperature pipeline wall thickness based on the shear horizontal ultrasonic guided wave. Nondestruct. Test. 2019, 41, 1–6. [Google Scholar]
- Gao, F. Research of High Temperature Pipeline Ultrasonic Corrosion Monitoring Technology. Master’s Thesis, Shenyang University of Technology, Shengyang, China, 2014. [Google Scholar]
- Gong, Y.H.; Wu, X.F.; Yin, X.F.; Liu, W.G.; Xiao, N.F. On-line damage detection of wave-guiding rods under high temperature conditions. Nondestruct. Test. 2019, 41, 70–74. [Google Scholar]
- Li, J.G.; Zou, Y.H.; Liu, H.; Dong, G.W. Numerical simulation of propagation laws of acoustic emission in the wave-guide pole. Chin. J. Undergr. Space Eng. 2008, 4, 1148–1151. [Google Scholar]
- Zhang, P.; Tang, Z.; Lv, F.; Yang, K. Numerical and experimental investigation of guided wave propagation in a multi-wire cable. Appl. Sci. 2019, 9, 1028. [Google Scholar] [CrossRef] [Green Version]
- Terrien, N.; Osmont, D.; Royer, D.; Lepoutre, F.; Déom, A. A combined finite element and modal decomposition method to study the interaction of Lamb modes with micro-defects. Ultrasonics 2007, 46, 74–88. [Google Scholar] [CrossRef]
- Ma, W.M.; Zhang, Z.Y.; Shang, X.P.; Zhang, J. Application of ultrasonic wall thickness online monitoring system in high acid gas field. Oil-Gasfield Surf. Eng. 2020, 39, 79–83. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | SS316L | Aluminum | Copper |
|---|---|---|---|
| Density (kg/) | 7800 | 2700 | 8960 |
| Young’s modulus (GPa) | 211 | 70 | 110 |
| Poisson’s ratio | 0.286 | 0.33 | 0.35 |
| Constant pressure heat capacity (J/(kg·K)) | 475 | 900 | 385 |
| Thermal conductivity (W/(m·K)) | 44.5 | 238 | 400 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Luo, X.; Liu, R.; Yun, Z.; Zhang, J. Waveguide Structure Design and Simulation for High-Temperature Corrosion Thickness Detection. Appl. Sci. 2022, 12, 12960. https://doi.org/10.3390/app122412960
Li Y, Luo X, Liu R, Yun Z, Zhang J. Waveguide Structure Design and Simulation for High-Temperature Corrosion Thickness Detection. Applied Sciences. 2022; 12(24):12960. https://doi.org/10.3390/app122412960
Chicago/Turabian StyleLi, Yan, Xi Luo, Ruihao Liu, Ze Yun, and Jixiang Zhang. 2022. "Waveguide Structure Design and Simulation for High-Temperature Corrosion Thickness Detection" Applied Sciences 12, no. 24: 12960. https://doi.org/10.3390/app122412960
APA StyleLi, Y., Luo, X., Liu, R., Yun, Z., & Zhang, J. (2022). Waveguide Structure Design and Simulation for High-Temperature Corrosion Thickness Detection. Applied Sciences, 12(24), 12960. https://doi.org/10.3390/app122412960