
Design Study of a Large-Angle Optical Scanning System for MEMS LIDAR



Abstract
:1. Introduction
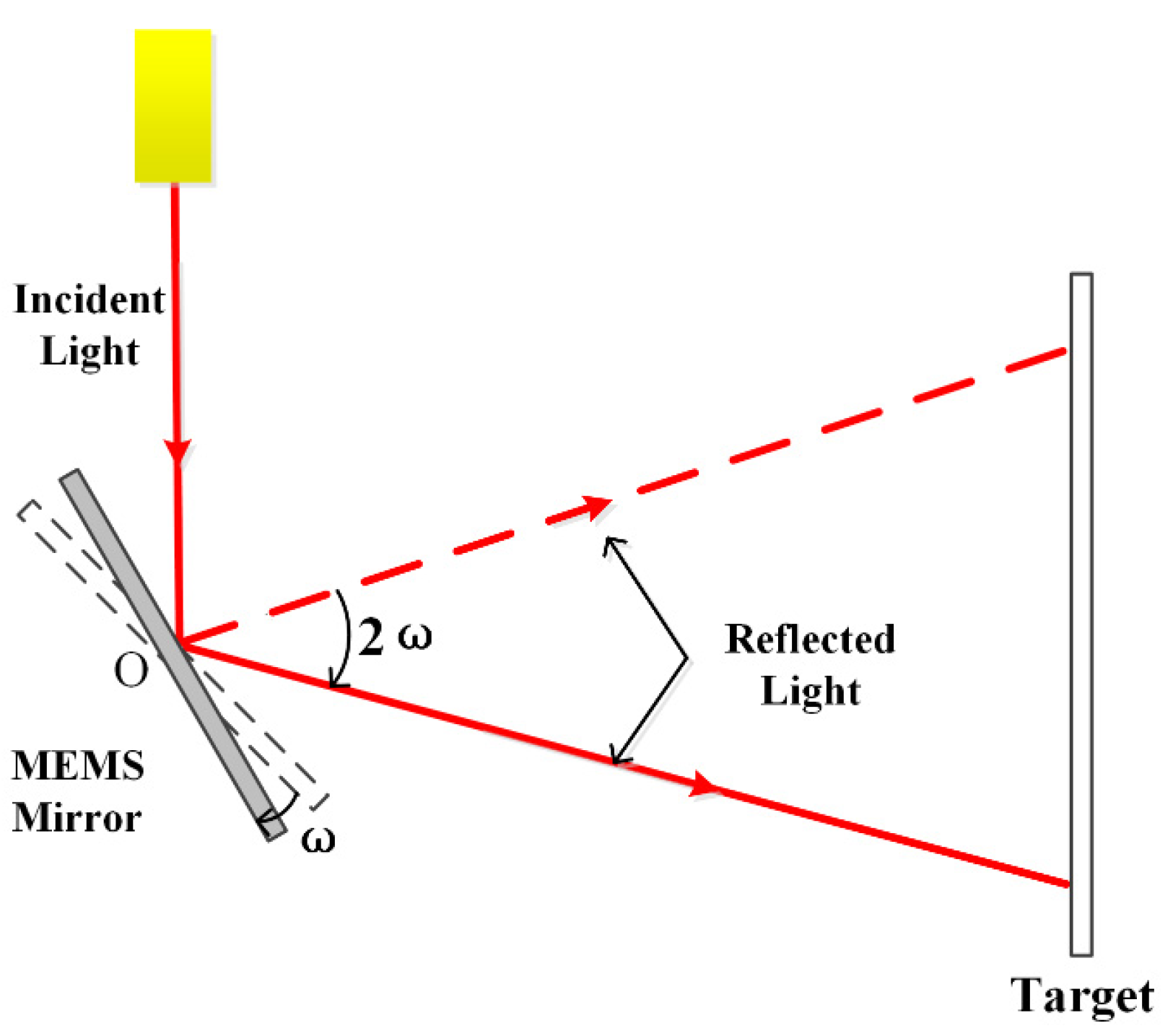
2. Basic Principles of the Scanning System
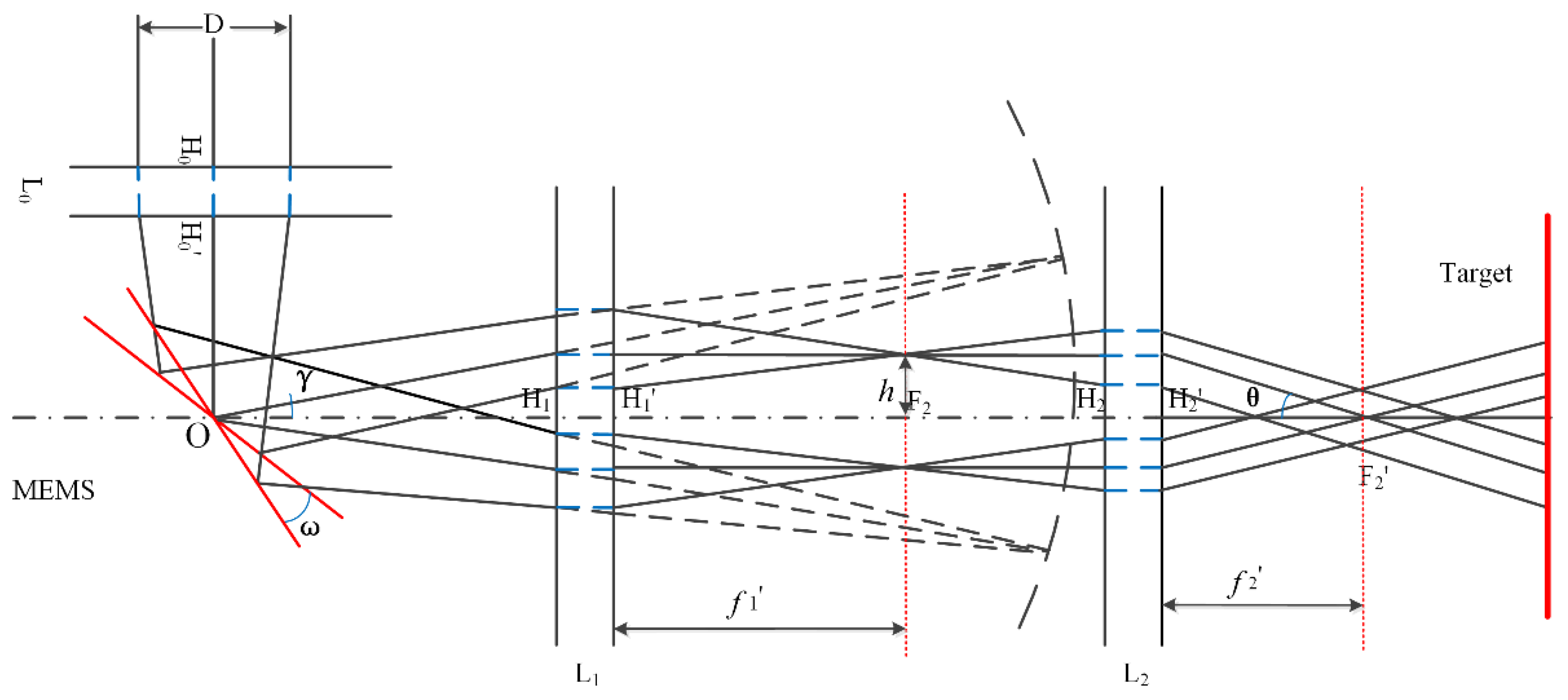
3. Scanning Optical System Design
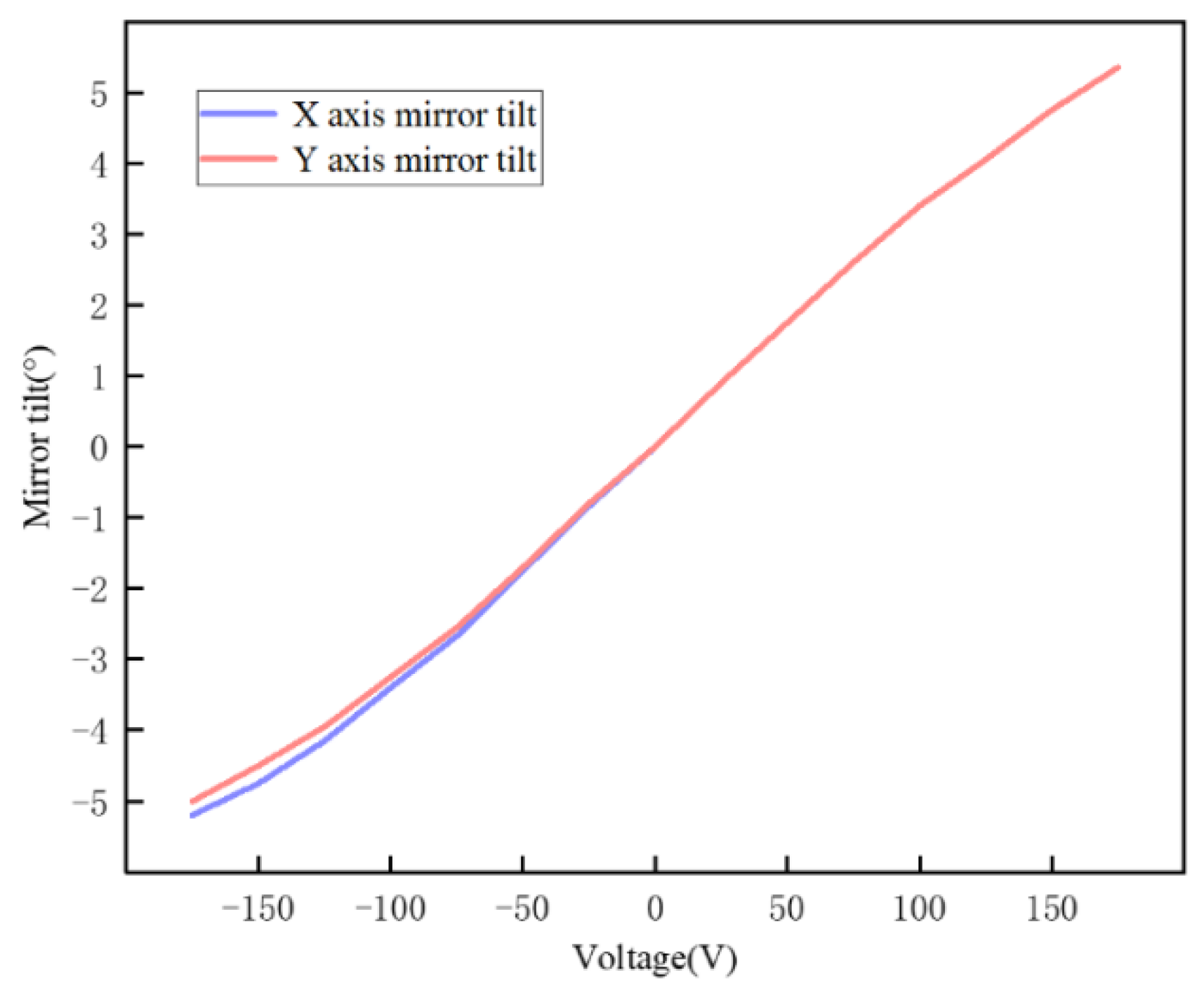
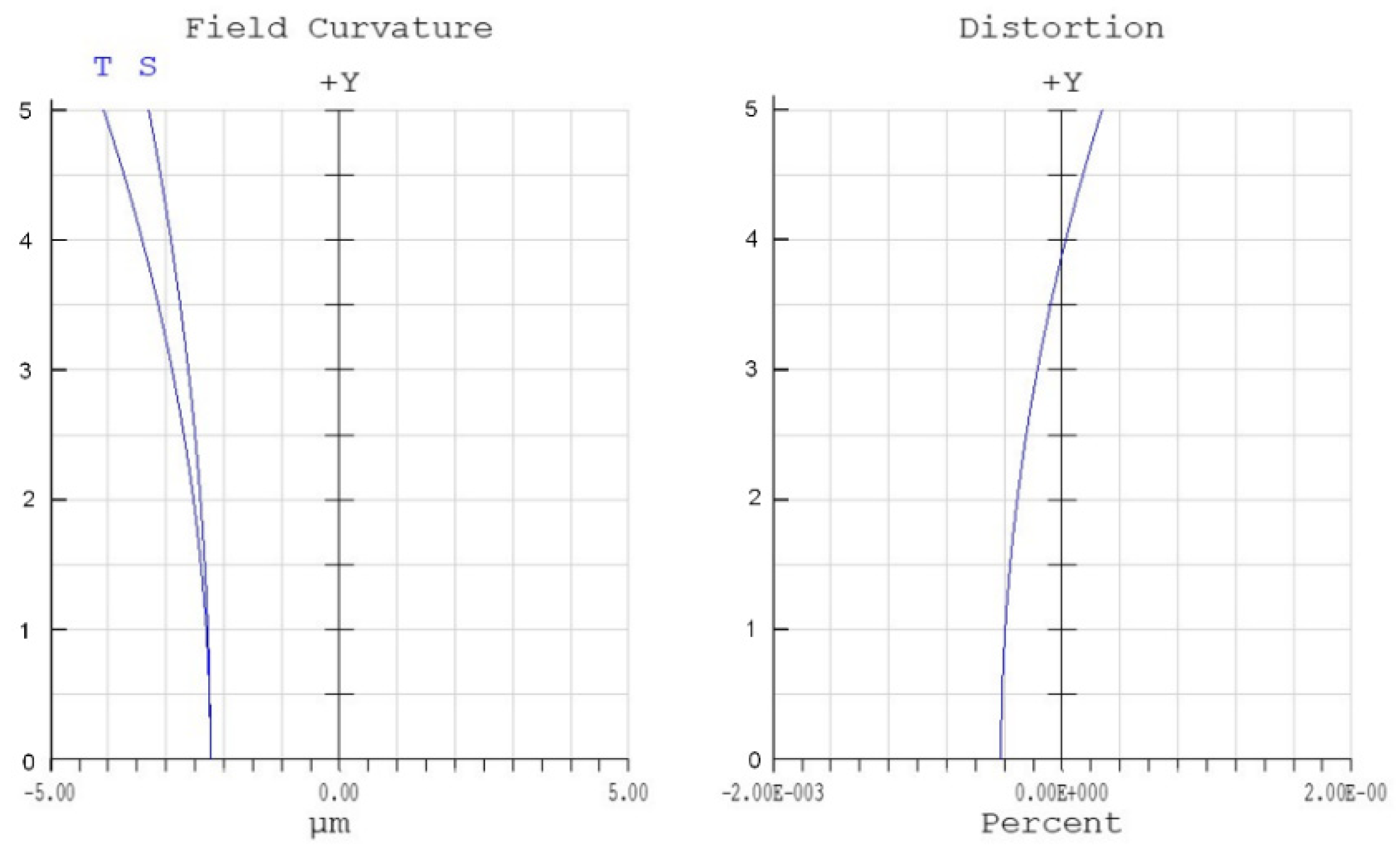
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Azevedo, F.; Dias, A.; Almeida, J.; Oliveira, A.; Ferreira, A.; Santos, T.; Martins, A.; Silva, E. LiDAR-based real-time detection and modeling of power lines for unmanned aerial vehicles. Sensors 2019, 19, 1812. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Panjvani, K.; Dinh, A.V.; Wahid, K.A. LIDARPhone-a low-cost LIDAR-based 3d scanning system for leaf morphological trait extraction. Front. Plant Sci. 2019, 10, 00147. [Google Scholar] [CrossRef] [PubMed]
- Muftuoglu, I.K.; Bartsch, D.-U.; Barteselli, G.; Gaber, R.; Nezgoda, J.; Freeman, W.R. Visualization of macular pucker by multicolor scanning laser imaging. Retina 2018, 38, 352–358. [Google Scholar] [CrossRef] [PubMed]
- Weiss, U.; Biber, P. Plant detection and mapping for agricultural robots using a 3D LIDAR sensor. Robot. Auton. Syst. 2011, 59, 265–273. [Google Scholar] [CrossRef]
- Thakur, R. Scanning LIDAR in advanced driver assistance systems and beyond: Building a road map for next-generation LIDAR technology. IEEE Consum. Electron. Mag. 2016, 5, 48–54. [Google Scholar] [CrossRef]
- Gong, W.; Zhao, C.; Yu, H.; Chen, M.; Xu, W.; Han, S. Three-dimensional ghost imaging LIDAR via sparsity constraint. Sci. Rep. 2016, 6, 26133. [Google Scholar] [CrossRef] [Green Version]
- Bi, X. LiDAR Technology. In Environmental Perception Technology for Unmanned Systems; Springer: Singapore, 2021; pp. 67–103. [Google Scholar]
- Zhang, Y.; Shao, Z.F. Assessing of urban vegetation biomass in combination with LiDAR and high-resolution remote sensing images. Int. J. Remote Sens. 2021, 42, 964–985. [Google Scholar] [CrossRef]
- Wang, D.; Watkins, C.; Xie, H. MEMS mirrors for LiDAR: A review. Micromachines 2020, 11, 456. [Google Scholar] [CrossRef] [PubMed]
- Stettner, R. Compact 3D Flash LIDAR video cameras and applications. In Laser Radar Technology and Applications XV; SPIE: Bellingham, WA, USA, 2010; p. 851831. [Google Scholar]
- McManamon, P.F.; Banks, P.S.; Beck, J.D.; Fried, D.G.; Huntington, A.S.; Watson, E.A. Comparison of flash LIDAR detector options. Opt. Eng. 2017, 56, 031223. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Wu, M.C. An optical phased array for LIDAR. J. Phys. 2016, 772, 012004. [Google Scholar] [CrossRef]
- Hsu, C.-P.; Li, B.; Solano-Rivas, B.; Gohil, A.R.; Chan, P.H.; Moore, A.D.; Donzella, V. A review and perspective on optical phased array for automotive LiDAR. IEEE J. Sel. Top. Quantum Electron. 2021, 27, 1–16. [Google Scholar] [CrossRef]
- Xu, F.; Qiao, D.; Xia, C.; Song, X.; Zheng, W.; He, Y.; Fan, Q. A semi-coaxial MEMS LiDAR design with independently adjustable detection range and angular resolution. Sens. Actuators A Phys. 2021, 5, 112715. [Google Scholar] [CrossRef]
- Zhu, J.; Liu, X.; Shi, Q.; He, T.; Sun, Z.; Guo, X.; Liu, W.; Bin Sulaiman, O.; Dong, B.; Lee, C. Development trends and perspectives of future sensors and MEMS/NEMS. Micromachines 2020, 11, 7. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yoo, H.W.; Druml, N.; Brunner, D.; Schwarzl, C.; Thurner, T.; Hennecke, M.; Schitter, G. MEMS-based LIDAR for autonomous driving. Elektrotechnik Und Inf. 2018, 135, 408–415. [Google Scholar] [CrossRef] [Green Version]
- Hu, Q.; Pedersen, C.; Rodrigo, P. Eye-safe diode laser Doppler LIDAR with a MEMS beam-scanner. Opt. Express 2016, 24, 1934–1942. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Takashima, Y.; Hellman, B.; Rodriguez, J.; Chen, G.; Smith, B.; Gin, A.; Espinoza, A.; Winkler, P.; Perl, C.; Luo, C.; et al. MEMS-based Imaging LIDAR. In Proceedings of the Optics and Photonics for Energy and the Environment, Singapore, 5–8 November 2018; p. ET4A.1. [Google Scholar]
- Niclass, C.; Ito, K.; Soga, M.; Matsubara, H.; Aoyagi, I.; Kato, S.; Kagami, M. Design and characterization of a 256 × 64-pixel single-photon imager in CMOS for a MEMS-based laser scanning time-of-flight sensor. Opt. Express 2012, 10, 11863–11881. [Google Scholar] [CrossRef] [PubMed]
- Lee, X.B.; Wang, C.H. Optical design for uniform scanning in MEMS-based 3D imaging LIDAR. Appl. Opt. 2015, 54, 2219–2223. [Google Scholar] [CrossRef] [PubMed]
- Lee, X.; Wang, C.; Luo, Z.; Li, S. Optical design of a new folding scanning system in MEMS-based LIDAR. Opt. Laser Technol. 2020, 125, 106013. [Google Scholar] [CrossRef]
- ZEMAX Development Corporation. Optical Design Program User’s Guide; ZEMAX: Kirkland, WA, USA, 2014. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device Parameters | Value |
|---|---|
| Actuator | Gimbal-less Dual-Axis Quasistatic |
| Mirror Size | 5.0 mm |
| Maximum Mech. Angle-X Axis | 5.1928° |
| Maximum Mech. Angle-Y Axis | 5.2236° |
| Driver Bias Voltage | 90 V |
| Low pass filter Cutoff Frequency | 120 Hz |
| Surface | Radius/mm | Thickness/mm | Glass | Diameter/mm |
|---|---|---|---|---|
| Object | Infinity | 1267 | ||
| Stop | Infinity | 20 | 5 | |
| 2 | 36.314 | 2.646 | F8 | 15 |
| 3 | −44.353 | 3.346 | KCL | 15 |
| 4 | 82.783 | 10 | 15 | |
| 5 | Infinity | −12 | MIRROR | 8 |
| 6 | Infinity | 15 | MIRROR | 5 |
| 7 | −26.446 | 2.288 | SF67 | 16 |
| 8 | −21.596 | 3.861 | 16 | |
| 9 | −13.605 | 1 | LTTHOSIL-Q | 20 |
| 10 | −44.966 | 3.568 | 20 | |
| 11 | −33.876 | 1.303 | LASF35 | 20 |
| 12 | −28.725 | 1.142 | 20 | |
| 13 | −1521.767 | 2.442 | LASF35 | 24 |
| 14 | −49.862 | 2.838 | 24 | |
| 15 | 286.426 | 3.452 | SF66 | 24 |
| 16 | −79.392 | 22.076 | 24 | |
| 17 | 33.650 | 0.955 | BAF8 | 22 |
| 18 | 32.590 | 4.256 | SF66 | 22 |
| 19 | −30.570 | 5 | 22 | |
| 20 | 30.570 | 6.252 | SF66 | 22 |
| 21 | −32.590 | 0.955 | BAF8 | 22 |
| 22 | −33.650 | — |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pang, Y.; Zhang, K.; Bai, Z.; Sun, Y.; Yao, M. Design Study of a Large-Angle Optical Scanning System for MEMS LIDAR. Appl. Sci. 2022, 12, 1283. https://doi.org/10.3390/app12031283
Pang Y, Zhang K, Bai Z, Sun Y, Yao M. Design Study of a Large-Angle Optical Scanning System for MEMS LIDAR. Applied Sciences. 2022; 12(3):1283. https://doi.org/10.3390/app12031283
Chicago/Turabian StylePang, Yajun, Kai Zhang, Zhenxu Bai, Youchun Sun, and Meiling Yao. 2022. "Design Study of a Large-Angle Optical Scanning System for MEMS LIDAR" Applied Sciences 12, no. 3: 1283. https://doi.org/10.3390/app12031283
APA StylePang, Y., Zhang, K., Bai, Z., Sun, Y., & Yao, M. (2022). Design Study of a Large-Angle Optical Scanning System for MEMS LIDAR. Applied Sciences, 12(3), 1283. https://doi.org/10.3390/app12031283