
Optimization of a Permanent Magnet Synchronous Motor for e-Mobility Using Metamodels


Abstract
:1. Introduction
2. Torque Ripple
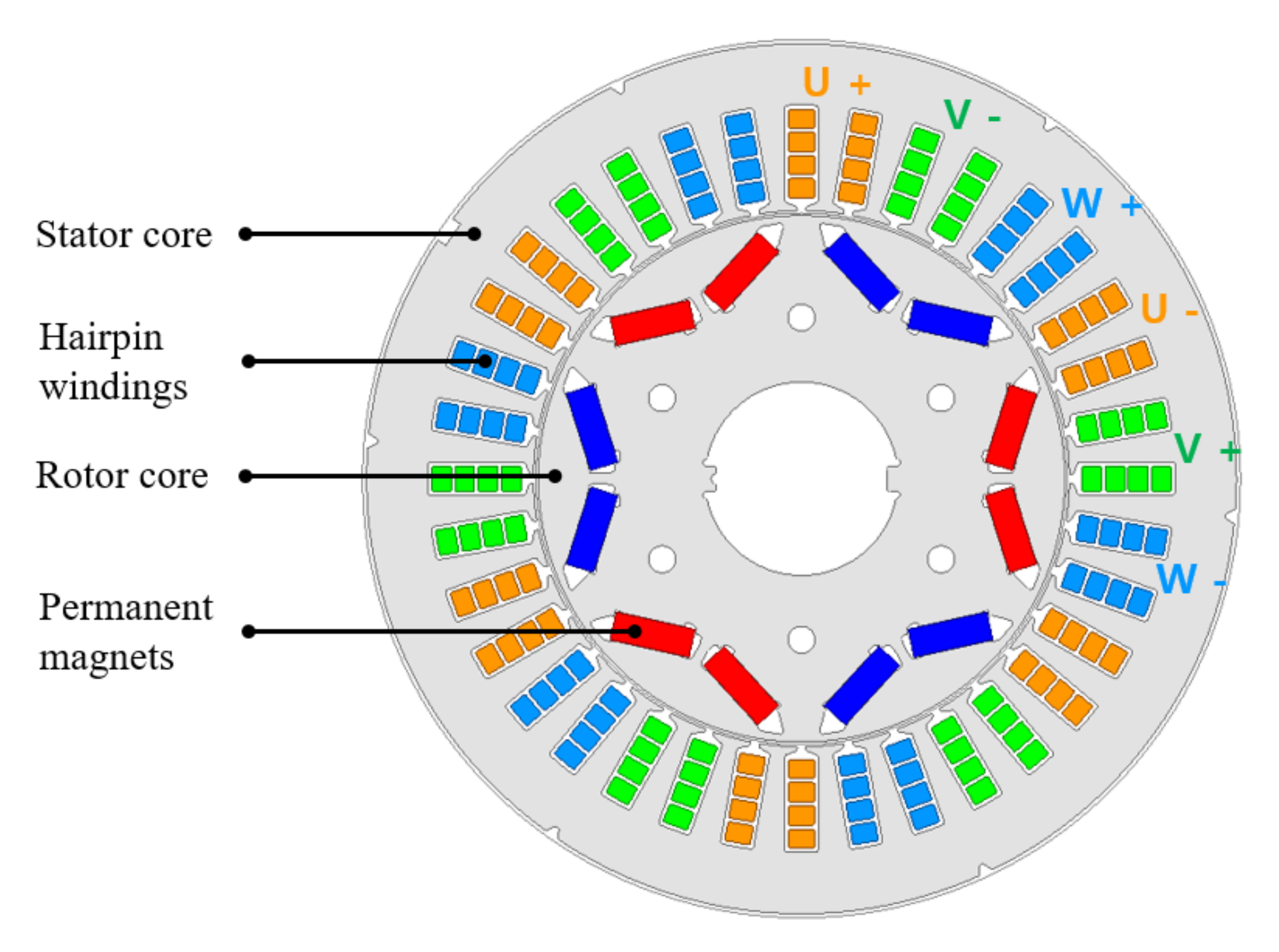
2.1. Initial Model of the PMSM
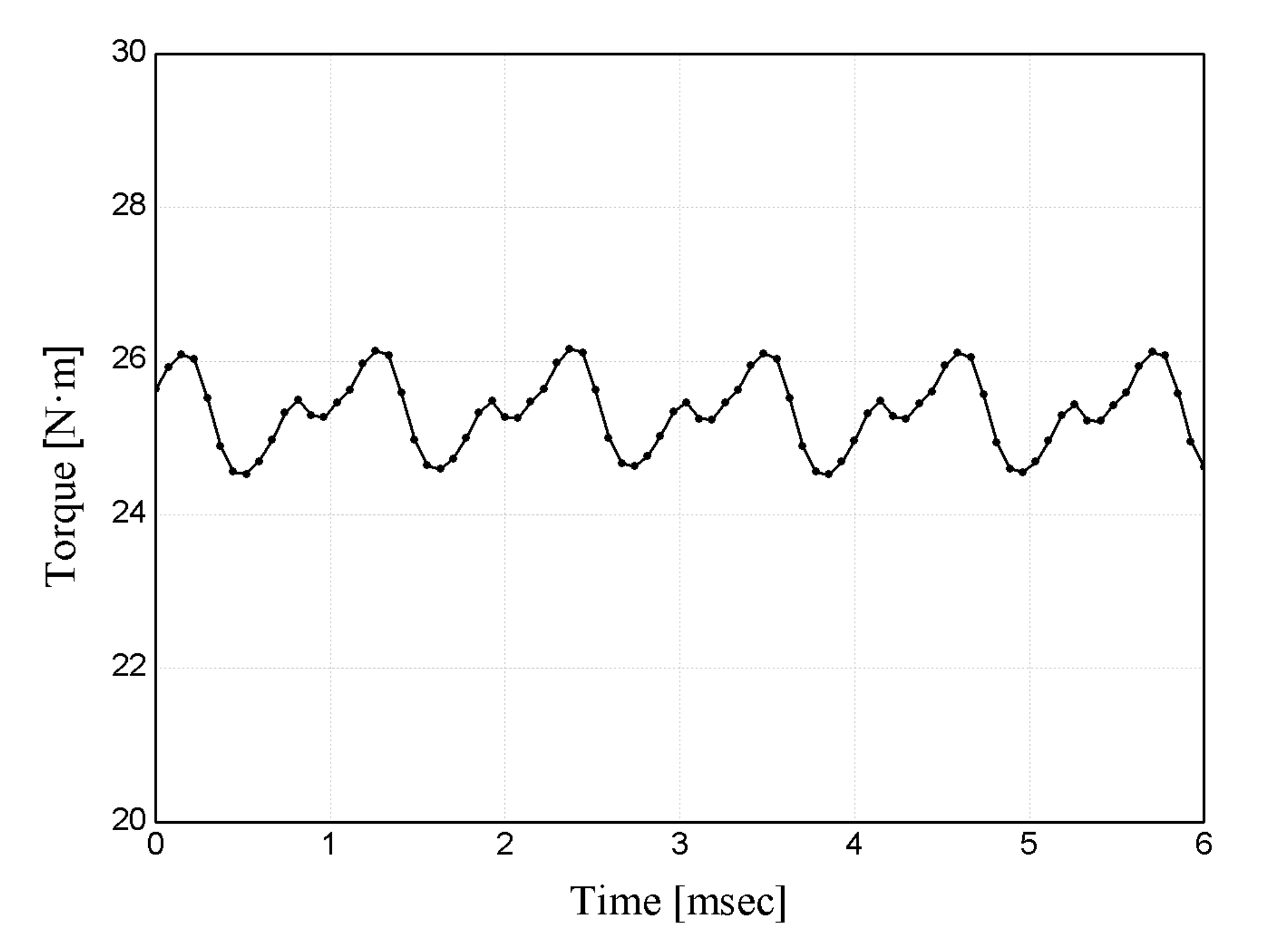
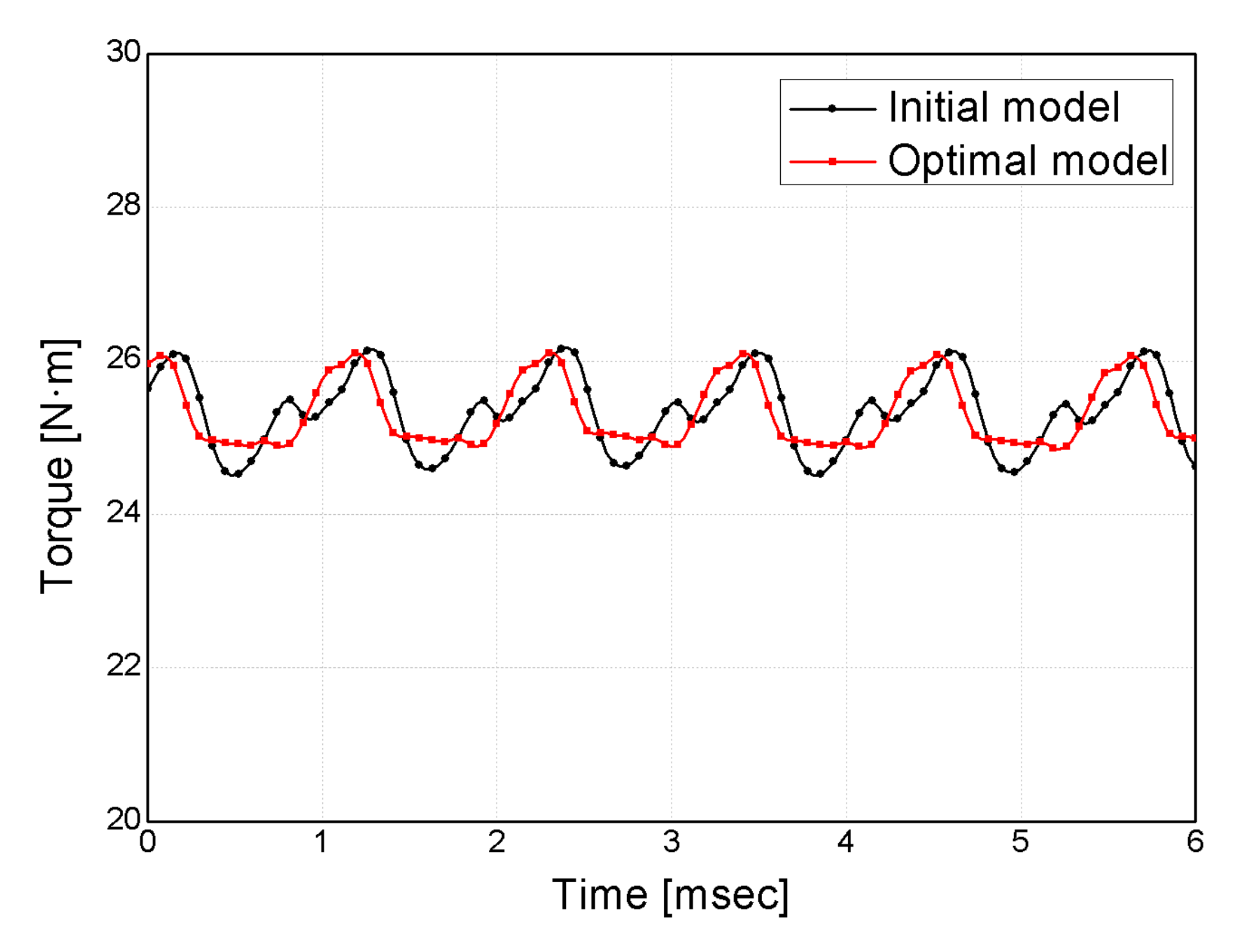
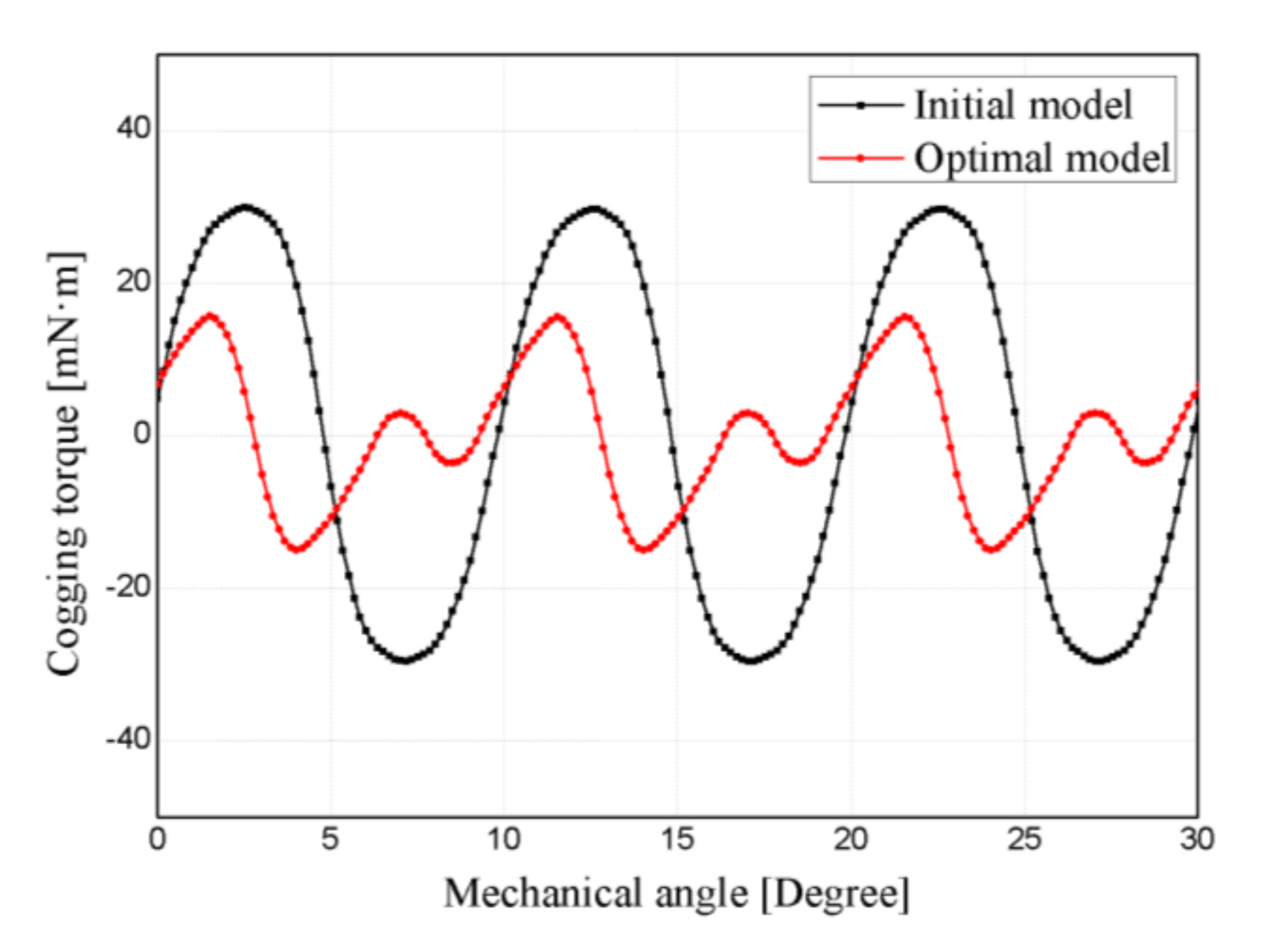
2.2. Analysis Result of the Torque Ripple
3. Design Optimization
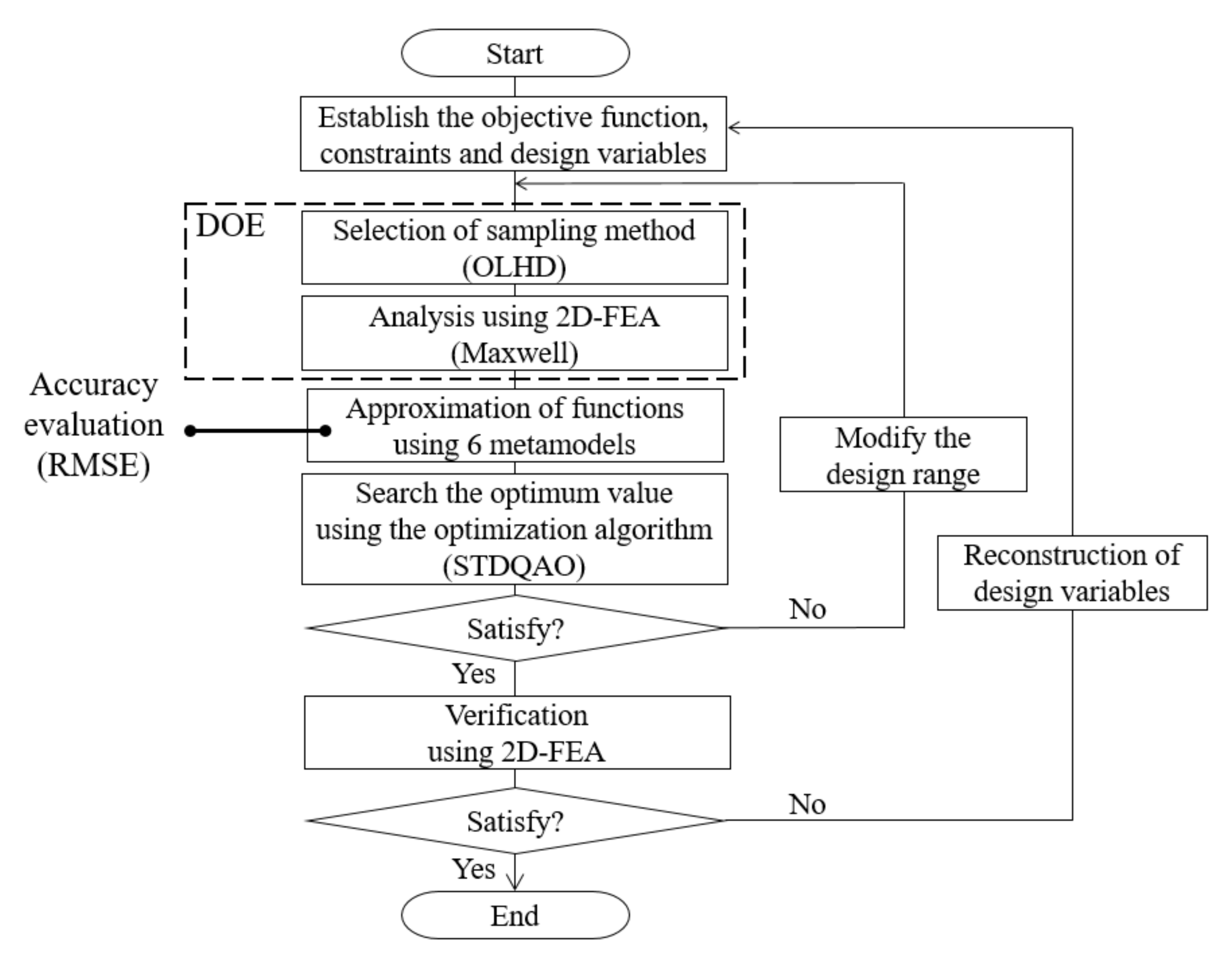
3.1. Optimization Process
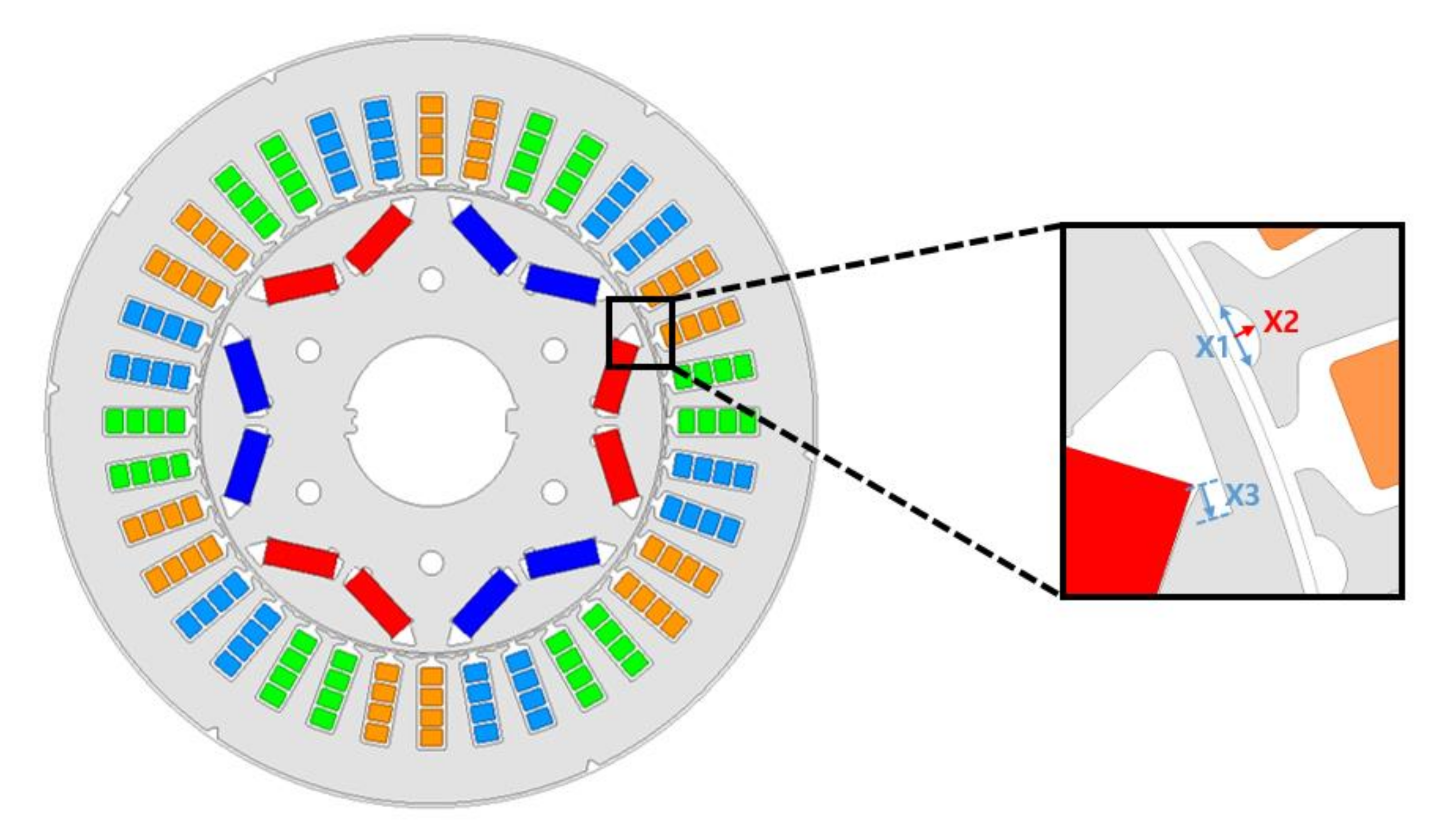
3.2. Design of Experiment
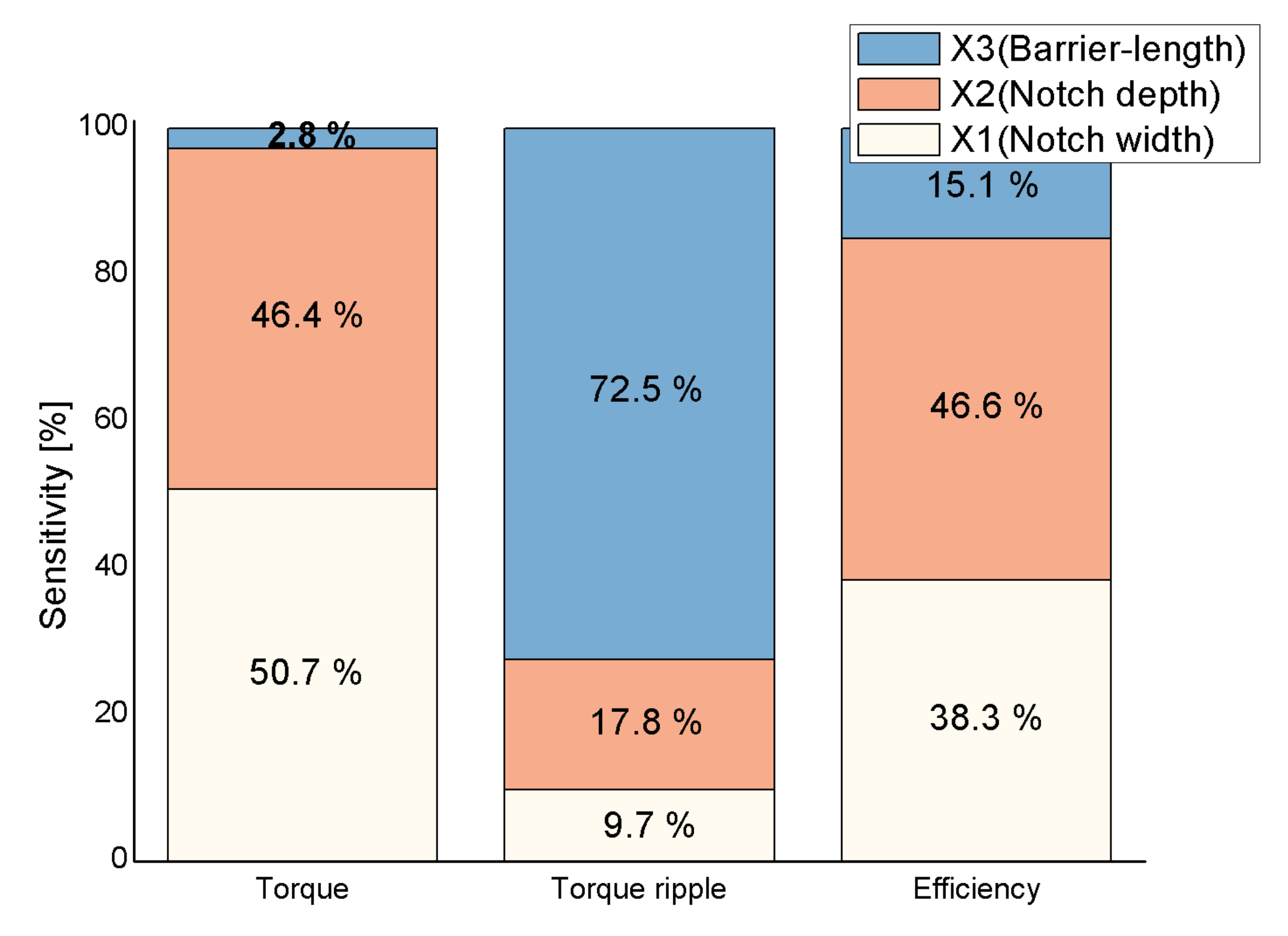
3.3. Sensitivity Analysis
3.4. Metamodeling
3.5. Optimization Results
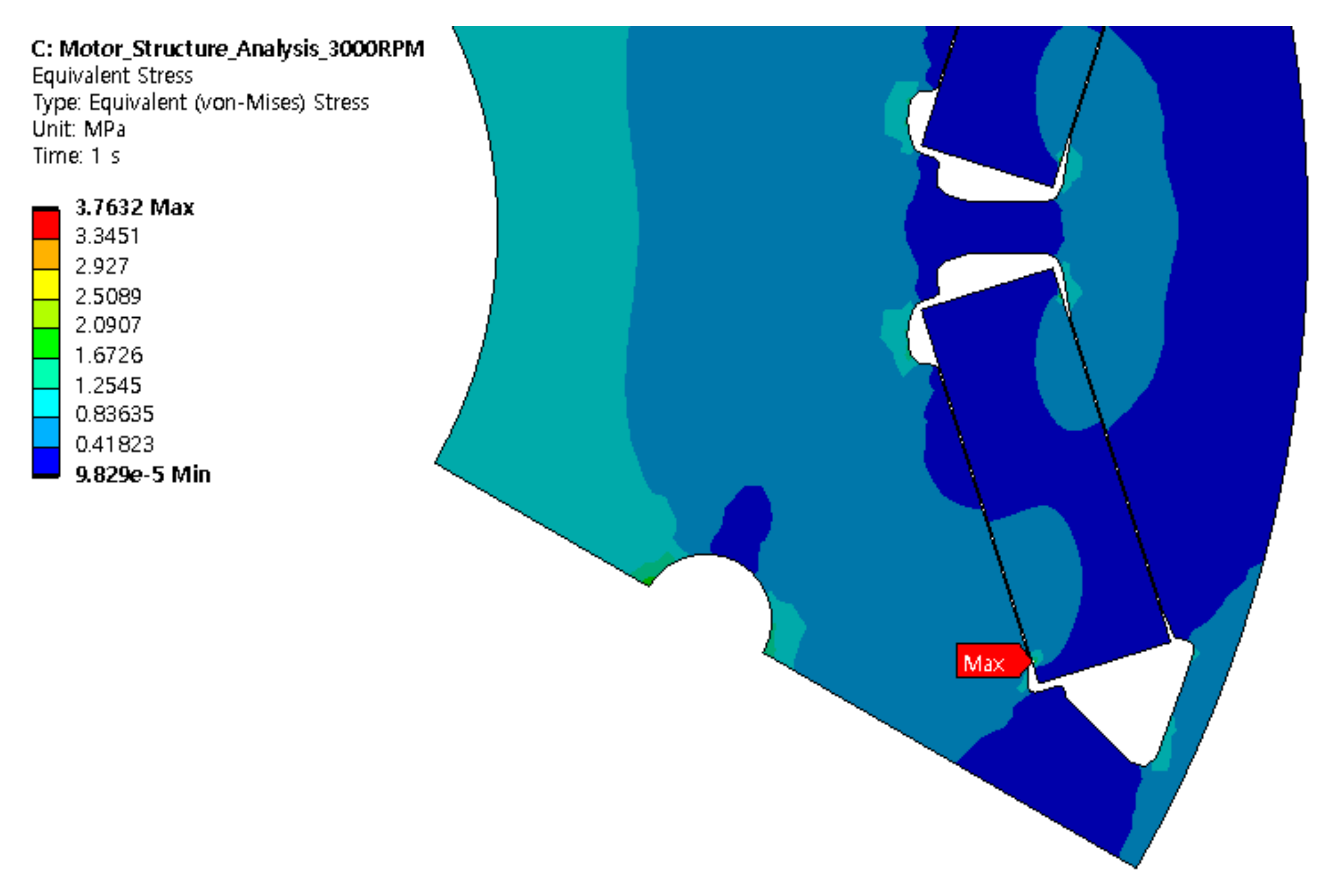
3.6. Mechanical Stress Analysis
3.7. Consideration
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Şengül, B.; Mostofi, H. Impacts of E-Micromobility on the Sustainability of Urban Transportation—A Systematic Review. Appl. Sci. 2021, 11, 5851. [Google Scholar] [CrossRef]
- Abduljabbar, R.L.; Liyanage, S.; Dia, H. The Role of Micro-Mobility in Shaping Sustainable Cities: A Systematic Literature Review. Transp. Res. Part D Transp. Environ. 2021, 92, 102734. [Google Scholar] [CrossRef]
- Van Mierlo, J.; Berecibar, M.; El Baghdadi, M.; De Cauwer, C.; Messagie, M.; Coosemans, T.; Jacobs, V.A.; Hegazy, O. Beyond the State of the Art of Electric Vehicles: A Fact-Based Paper of the Current and Prospective Electric Vehicle Technologies. World Electr. Veh. J. 2021, 12, 20. [Google Scholar] [CrossRef]
- Lee, H.-K.; Bang, T.-K.; Lee, J.-I.; Woo, J.-H.; Shin, H.-S.; Yoon, I.-J.; Choi, J.-Y. Analytical Study and Comparison of Electromagnetic Characteristics of 8-Pole 9-Slot and 8-Pole 12-Slot Permanent Magnet Synchronous Machines Considering Rotor Eccentricity. Electronics 2021, 10, 2036. [Google Scholar] [CrossRef]
- Kotin, D.; Ivanov, I.; Shtukkert, S. Modified Permanent Magnet Synchronous Generators for Using in Energy Supply System for Autonomous Consumer. Energies 2021, 14, 7196. [Google Scholar] [CrossRef]
- Bouguenna, I.F.; Tahour, A.; Kennel, R.; Abdelrahem, M. Multiple-Vector Model Predictive Control with Fuzzy Logic for PMSM Electric Drive Systems. Energies 2021, 14, 1727. [Google Scholar] [CrossRef]
- Lakhe, R.K.; Chaoui, H.; Alzayed, M.; Liu, S. Universal Control of Permanent Magnet Synchronous Motors with Uncertain Dynamics. Actuators 2021, 10, 49. [Google Scholar] [CrossRef]
- Choi, M.; Choi, G. Modeling, Investigation, and Mitigation of AC Losses in IPM Machines with Hairpin Windings for EV Applications. Energies 2021, 14, 8034. [Google Scholar] [CrossRef]
- Agamloh, E.; von Jouanne, A.; Yokochi, A. An Overview of Electric Machine Trends in Modern Electric Vehicles. Machines 2020, 8, 20. [Google Scholar] [CrossRef] [Green Version]
- Hwang, M.-H.; Lee, H.-S.; Cha, H.-R. Analysis of Torque Ripple and Cogging Torque Reduction in Electric Vehicle Traction Platform Applying Rotor Notched Design. Energies 2018, 11, 3053. [Google Scholar] [CrossRef] [Green Version]
- Lee, M.; Hwang, Y.; Nam, K. Torque Ripple Minimizing of Uniform Slot Machines with Delta Rotor via Subdomain Analysis. Energies 2021, 14, 7390. [Google Scholar] [CrossRef]
- Jang, H.; Kim, H.; Liu, H.-C.; Lee, H.-J.; Lee, J. Investigation on the Torque Ripple Reduction Method of a Hybrid Electric Vehicle Motor. Energies 2021, 14, 1413. [Google Scholar] [CrossRef]
- Lukman, G.F.; Ahn, J.-W. Torque Ripple Reduction of Switched Reluctance Motor with Non-Uniform Air-Gap and a Rotor Hole. Machines 2021, 9, 348. [Google Scholar] [CrossRef]
- Park, Y.-W.; Ko, J.-S.; Kim, D.-K. Optimal Design of Step-Sloping Notches for Cogging Torque Minimization of Single-Phase BLDC Motors. Energies 2021, 14, 7104. [Google Scholar] [CrossRef]
- Park, J.-C.; Park, S.-H.; Kim, J.-H.; Lee, S.-G.; Lee, G.-H.; Lim, M.-S. Diagnosis and Robust Design Optimization of SPMSM Considering Back EMF and Cogging Torque due to Static Eccentricity. Energies 2021, 14, 2900. [Google Scholar] [CrossRef]
- Hoang, P.H.; Phan, H.N.; Nguyen, D.T.; Paolacci, F. Kriging Metamodel-Based Seismic Fragility Analysis of Single-Bent Reinforced Concrete Highway Bridges. Buildings 2021, 11, 238. [Google Scholar] [CrossRef]
- Orosz, T.; Gadó, K.; Katona, M.; Rassõlkin, A. Automatic Tolerance Analysis of Permanent Magnet Machines with Encapsuled FEM Models Using Digital-Twin-Distiller. Processes 2021, 9, 2077. [Google Scholar] [CrossRef]
- Choi, Y.; Song, D.; Yoon, S.; Koo, J. Comparison of Factorial and Latin Hypercube Sampling Designs for Meta-Models of Building Heating and Cooling Loads. Energies 2021, 14, 512. [Google Scholar] [CrossRef]
- Akay, A.; Lefley, P. Torque Ripple Reduction Method in a Multiphase PM Machine for No-Fault and Open-Circuit Fault-Tolerant Conditions. Energies 2021, 14, 2615. [Google Scholar] [CrossRef]
- Chau, K.T. Electric Vehicle Machines and Drives: Design, Analysis and Application, 1st ed.; Wiley-IEEE: Hoboken, NJ, USA, 2015; p. 243. [Google Scholar]
- Butler, N.A. Optimal and orthogonal Latin hypercube designs for computer experiments. Biometrika 2001, 88, 847–857. [Google Scholar] [CrossRef]
- Park, J.; Yoo, D.; Moon, J.; Yoon, J.; Park, J.; Lee, S.; Lee, D.; Kim, C. Reliability-Based Robust Design Optimization of Lithium-Ion Battery Cells for Maximizing the Energy Density by Increasing Reliability and Robustness. Energies 2021, 14, 6236. [Google Scholar] [CrossRef]
- You, Y.-M. Optimal Design of PMSM Based on Automated Finite Element Analysis and Metamodeling. Energies 2019, 12, 4673. [Google Scholar] [CrossRef] [Green Version]
- Hancu, G.; Orlandini, S.; Papp, L.A.; Modroiu, A.; Gotti, R.; Furlanetto, S. Application of Experimental Design Methodologies in the Enantioseparation of Pharmaceuticals by Capillary Electrophoresis: A Review. Molecules 2021, 26, 4681. [Google Scholar] [CrossRef]
- Jeong, C.H.; Ko, M.K.; Lee, M.; Lee, S.H. CFD-Based Metamodeling of the Propagation Distribution of Styrene Spilled from a Ship. Appl. Sci. 2020, 10, 2109. [Google Scholar] [CrossRef] [Green Version]
- Aissa, M.H.; Verstraete, T. Metamodel-Assisted Multidisciplinary Design Optimization of a Radial Compressor. Int. J. Turbomach. Propuls. Power 2019, 4, 35. [Google Scholar] [CrossRef] [Green Version]
- Kontogiannis, D.; Bargiotas, D.; Daskalopulu, A.; Tsoukalas, L.H. A Meta-Modeling Power Consumption Forecasting Approach Combining Client Similarity and Causality. Energies 2021, 14, 6088. [Google Scholar] [CrossRef]
- Kim, Y.; Oh, H. Comparison between Multiple Regression Analysis, Polynomial Regression Analysis, and an Artificial Neural Network for Tensile Strength Prediction of BFRP and GFRP. Materials 2021, 14, 4861. [Google Scholar] [CrossRef]
- Kalita, K.; Chakraborty, S.; Madhu, S.; Ramachandran, M.; Gao, X.-Z. Performance Analysis of Radial Basis Function Metamodels for Predictive Modelling of Laminated Composites. Materials 2021, 14, 3306. [Google Scholar] [CrossRef] [PubMed]
- PIDOTECH Inc. PIAnO User’s Manuals and Tutorials; PIDOTECH Inc.: Seoul, Korea, 2019. [Google Scholar]
- Chung, S.-U.; Lee, J.-Y. Teeth Arrangement and Pole–Slot Combination Design for PMLSM Detent Force Reduction. Energies 2021, 14, 8141. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Unit | Value |
|---|---|---|
| Rated output power | kW | 8 |
| Rated torque | N∙m | 25 |
| Rated speed | rpm | 3000 |
| Electrical steel | - | 35PN440 (POSCO) |
| Permanent magnet | - | N42SH |
| Continuous current | Arms | 150 |
| Current phase angle | ° | 40 |
| Copper conductor size | mm | 3*4 |
| No. of coil turns | turns | 4 |
| No. of poles and slots | ea | 6/36 |
| Outer diameter of stator | mm | 135 |
| Air-gap | mm | 0.75 |
| Lamination | mm | 50 |
| Design Variables | Unit | Initial | Lower | Upper | Considerations |
|---|---|---|---|---|---|
| Stator Notch width (X1) | mm | 0 | 0 | 2.8 | Mechanical stiffness |
| Stator Notch depth (X2) | mm | 0 | 0 | 0.7 | Mechanical stiffness |
| Barrier length (X3) | mm | 0 | 0 | 1 | Magnetic flux flow |
| Metamodel | RMSE Test Value | ||
|---|---|---|---|
| Torque Ripple | Average Torque | Efficiency | |
| EDT (Hybrid) | 0.861980 | 0.108295 | 0.029970 |
| Kriging | 0.444338 | 0.081922 | 0.027080 |
| MLP | 0.653252 | 0.063183 | 2.723662 |
| PR (Forward Step.) | 0.695273 | 0.029480 | 0.012375 |
| RBF (Int.) | 1.381964 | 0.062220 | 0.019989 |
| RBF (Reg.) | 0.778125 | 0.092219 | 0.241133 |
| Items | Unit | Initial | Optimal (HMA) | Optimal (STDQAO) | |||
|---|---|---|---|---|---|---|---|
| Predicted | FEA | Predicted | FEA | ||||
| Notch width (X1) | mm | 1.504 | 1.655 | 1.504 | |||
| Design variables | Notch depth (X2) | mm | 0.398 | 0.420 | 0.398 | ||
| Barrier length (X3) | mm | 0.072 | 0.072 | 0.072 | |||
| Torque ripple | % | 4.835 | 4.816 | 5.092 | 4.835 | 5.032 | |
| Design results | Average torque | N∙m | 25.278 | 25.251 | 25.253 | 25.278 | 25.284 |
| Efficiency | % | 90.118 | 90.111 | 90.113 | 90.118 | 90.120 | |
| Items | Unit | Rotor Core (35PN440) | Permanent Magnet (N42SH) |
|---|---|---|---|
| Density | kg/m3 | 7700 | 7400 |
| Poisson’s ratio | − | 0.25 | 0.33 |
| Young’s modulus | GPa | 195 | 152 |
| Tensile yield strength | MPa | 273 | 75 |
| Items | Unit | Initial | Notch | Flux Barrier | Optimal (FEA) | |
|---|---|---|---|---|---|---|
| Notch width (X1) | mm | 0 | 1.504 | 0 | 1.504 | |
| Design variables | Notch depth (X2) | mm | 0 | 0.398 | 0 | 0.398 |
| Barrier length (X3) | mm | 0 | 0 | 0.072 | 0.072 | |
| Torque ripple | % | 6.664 | 6.391 | 5.234 | 5.032 | |
| Design results | Average torque | N∙m | 25.296 | 25.154 | 25.426 | 25.284 |
| Efficiency | % | 90.108 | 90.074 | 90.153 | 90.120 | |
| Items | Unit | Initial | Best Metamodel (STDQAO) | Best Metamodel (FEA) | Worst Metamodel (STDQAO) | Worst Metamodel (FEA) |
|---|---|---|---|---|---|---|
| Notch width (X1) | mm | 0 | 1.504 | 1.457 | ||
| Notch depth (X2) | mm | 0 | 0.398 | 0.308 | ||
| Barrier length (X3) | mm | 0 | 0.072 | 0 | ||
| Torque ripple | % | 6.664 | 4.835 | 5.032 | 4.529 | 6.522 |
| Average torque | N∙m | 25.296 | 25.278 | 25.284 | 25.323 | 25.195 |
| Efficiency | % | 90.108 | 90.118 | 90.120 | 90.130 | 90.083 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.-e.; You, Y.-m. Optimization of a Permanent Magnet Synchronous Motor for e-Mobility Using Metamodels. Appl. Sci. 2022, 12, 1625. https://doi.org/10.3390/app12031625
Kim S-e, You Y-m. Optimization of a Permanent Magnet Synchronous Motor for e-Mobility Using Metamodels. Applied Sciences. 2022; 12(3):1625. https://doi.org/10.3390/app12031625
Chicago/Turabian StyleKim, Se-eun, and Yong-min You. 2022. "Optimization of a Permanent Magnet Synchronous Motor for e-Mobility Using Metamodels" Applied Sciences 12, no. 3: 1625. https://doi.org/10.3390/app12031625
APA StyleKim, S. -e., & You, Y. -m. (2022). Optimization of a Permanent Magnet Synchronous Motor for e-Mobility Using Metamodels. Applied Sciences, 12(3), 1625. https://doi.org/10.3390/app12031625