1. Introduction
Internal combustion engines are already being phased out in favor of electric motors. There are various reasons for switching from combustion to electric propulsion. The primary issue is the environmental pollution caused by internal combustion engines, which is greatly reduced by the usage of electric driving. As a result, electric motors in the automotive sector are presently undergoing extensive study in order to enhance their qualities and enable the use of electric or hybrid electric cars. Three-phase motors are the most-often-utilized electric motors in electric cars [
1,
2,
3]. The reason for this is that they have been meticulously examined, both in terms of structure and control and functioning. However, additional improvements to the three-phase electric drive are now small, and it is not believed that the drive will be substantially enhanced in this regard. This is where multiphase electric motors come in handy. Multiphase electric motors have lower current per phase, less torque ripple, better noise characteristics, more torque, higher efficiency, and, most importantly, superior fault tolerance than three-phase machines [
4,
5].
Machine fault tolerance, or the running of a machine in a fault condition, is critical in the usage of electrical machines as a drive for automobiles, planes, or ships. In these instances, the machine must be capable of working with the least amount of power loss and torque ripple, as well as the highest level of efficiency, because there could be catastrophic consequences when the passengers of a given vehicle are endangered.
The purpose of this research is to look at fault-tolerant control on a five-phase induction motor, and to bring new fault-tolerant control that will be easily implemented for any multiphase induction motor. The five-phase induction motor is the most commonly studied multiphase motor in terms of fault tolerance, along with six-phase symmetrical and six-phase quasisymmetrical motors [
6].
Another part of the work is the verification of the proposed control scheme on a real five-phase induction motor. The article examines how the performance of the engine in the faulty state with the proposed modification and without the modification is improved.
The fault conditions that are most frequently investigated and that can occur in a five-phase electrical machine are [
7,
8,
9]:
It should be noted that how the stator windings of an induction five-phase motor are linked is critical.
A five-phase induction motor’s stator winding can be linked in three ways, as will be detailed later. It has three connections: a star connection, a pentagon connection, and a pentacle connection.
It should be observed right away that the five-phase motor is capable of working with one or two phases out. In the case of a single-phase failure, research of the five-phase induction motor in the different stator winding connections in the literature [
10,
11] has revealed that the most acceptable option is a pentagon connection. With this connection, the induction motor can operate at a reduced power of 10%. When connected to a star, it is 20%. When connecting to a pentacle, the authors mention that this connection is not suitable for operation in the event of a failure of one phase. A comprehensive evaluation of the behavior of a five-phase induction motor in hazardous conditions is given in [
12]. The result of the article is that the most advantageous compromise for the design of the drive is the pentagon connection. This stator winding connection provides the optimum ratio of shaft power and torque to motor losses in a failure state. Moreover, the pentacle connection has the finest qualities in regular operation. As a result, it would be most desirable to run a five-phase motor in a pentacle connection and switch to a pentagon connection during fault operation. Other papers [
13] provide simulations of a five-phase induction motor operating in single-phase failure mode. As a consequence of these articles, the five-phase induction motor in the star connection may run normally, but with reduced power.
Recent studies on the fault tolerance of five-phase machines include [
14], which used a five-phase induction motor with a power of 3.8 kW and was powered by a two-level VSI. As described in the article, the paper presents an improved direct torque control (DTC) technique based on virtual vector evaluation under open-phase failure conditions. This control technique is derived from the work [
15] and the results of both works are compared. The torque ripple in [
14] is approximately 1.6 Nm, whereas the torque ripple in the compared DTC control technique [
15] is approximately 2.5 Nm. As a result, the ripple was reduced by 36%. The overall result of this work is that the proposed technique produces positive torque fluctuations of approximately 80% and 70% of the rated speed at prefault and postfault conditions, respectively. This restricts the postfault loading capacity of a five-phase induction motor to its full capability beyond 70% of rated speed, which was 12.5% lower than prefault operation.
In [
16], fault detection and fault-tolerant control for five-phase induction motors are described. The proposed management method is presented in the article. The result of the article is that torque ripple is reduced by more than 50% compared to non-fault tolerant steering.
Other current work in the field of fault tolerant control includes [
17], where for five-phase concentrated full-pitch winding induction motor under open-phase fault, the decoupling transformation matrix is reestablished, and open-phase-fault-tolerant control of five-phase concentrated full-pitch winding induction motor based on rotor field orientation is proposed. The measurement was performed on a five-phase induction motor with a power of 5.5 kW, where it was found that the motor ripple without the use of fault-tolerant control was 14% and after using the proposed fault-tolerant control scheme, the torque ripple was 2%.
However, by employing multiphase electric motors, more degrees of freedom may be employed to increase the drive during a one-phase malfunction. This implies that if a motor phase failure happens, the motor will continue to work normally, although with a 20% reduction in power. Due to the uneven spinning MMF, this will also affect other attributes such as torque ripple and efficiency. This may be avoided by removing the undesirable qualities of the open-phase drive by appropriate involvement in the control of the five-phase motor. Several papers in the literature address the control adjustment to reduce ripple and losses in the motor during one phase failure. The basic principle of this modification is to adjust the control algorithm to ensure spatial distribution of the voltage vectors to achieve sinusoidal distribution of the MMF—magnetomotive force—as described in [
18,
19]. Specific strategies based on a fault-tolerant control algorithm, including machine and converter nonlinearities, are described in [
20,
21,
22]. Another possibility is to use predictive fault tolerance control in [
23]. In [
24,
25], a technique of reconfiguration of phase currents in a single-phase and two-phase open fault state is presented. In articles [
26,
27], fault-tolerant control for five-phase permanent magnet synchronous motors is presented.
The paper “Predictive Torque Control for Five Phase Induction Motor Drive with Common Mode Voltage Reduction” [
28] presents another technique for fault-tolerant motor control. This paper presents finite state predictive torque control (PTC) for a two-level five-phase induction motor in order to reduce the common mode voltage. The measurements were performed on a five-phase induction motor with a power of 1 kW.
The first major purpose of this study is to offer comprehensive modeling of a five-phase induction drive for normal operation, a condition with a one-phase failure, and a model adjustment to improve the drive’s attributes with a one-phase failure. The equations of the models for these states are included in the article, along with the comprehensive derivation of these equations.
The second key purpose is to create an algorithm that will assure the decrease of torque ripple and the enhancement of drive attributes during a one-phase failure condition. The fault-tolerant control systems published in the literature are based on hysteresis regulator control. These have several advantages, which are detailed in
Section 3. In the
abcde system, this link has been updated and the hysteresis controllers have been replaced with PI controllers, which gives various advantages, as described in
Section 3.2. The main advantage of the new fault-tolerant control is the simple implementation for any multiphase induction motor.
In addition, the work focuses on the experimental validation of the suggested control on a real five-phase induction motor.
Finally, the measurement results will be compared to the results in normal operation and fault situations without control editing, and the acceptability and benefits of utilizing the control scheme during the failure will be assessed.
2. Modeling of Five-Phase Induction Motor
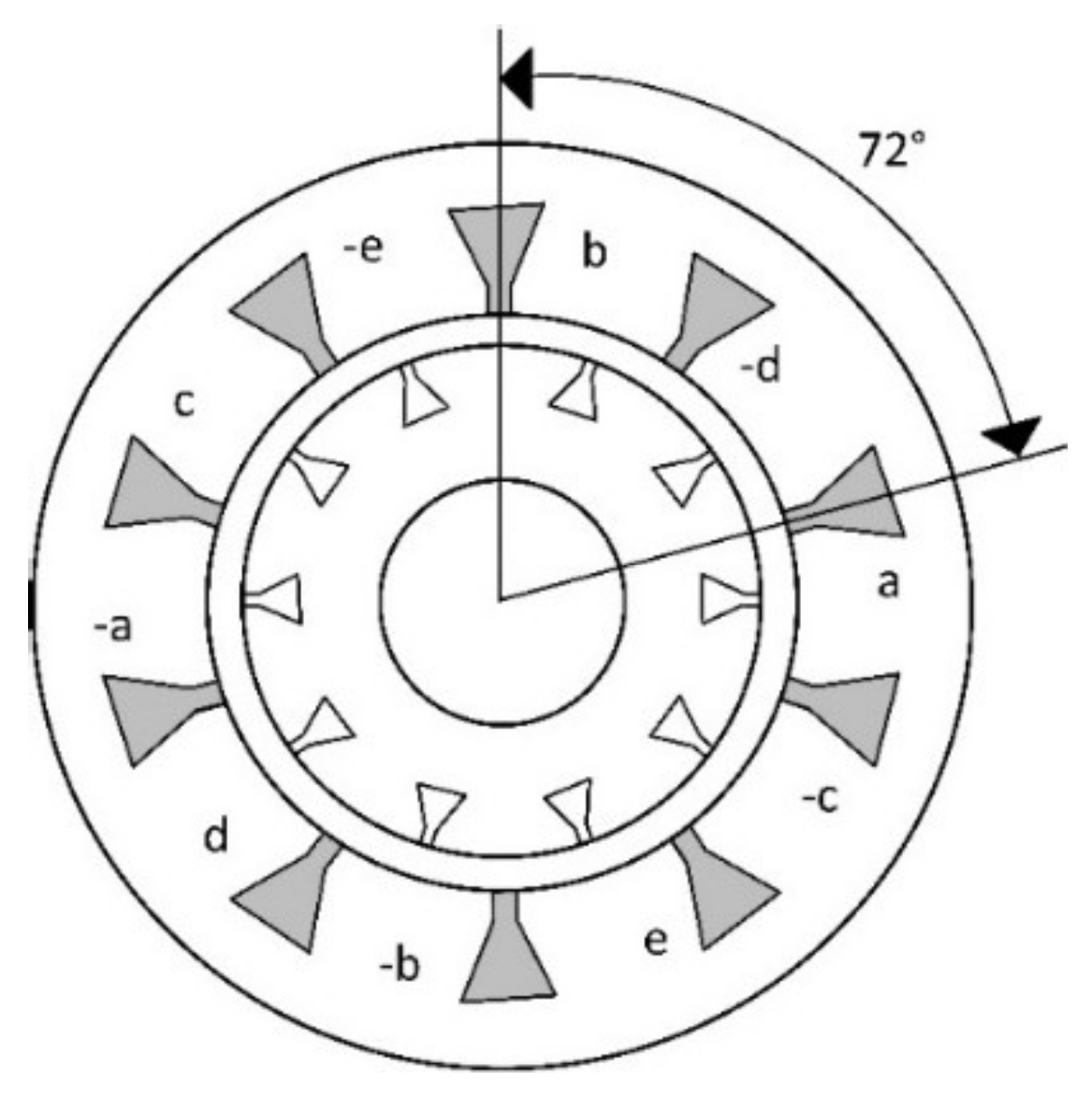
The functioning of a five-phase induction motor is the same as that of a three-phase machine. As a result, modeling a five-phase induction motor follows the same principles as modeling a three-phase motor. The only difference is the number of windings; a three-phase motor has three stator windings that are 120° apart in space and time, whereas a five-phase motor has five windings that are 72° apart in space and time. It is possible to build any n-phase machine in which the angle between the windings is determined by the number of phases, as defined by the relation:
Figure 1 depicts the mechanical distribution of the winding in a five-phase induction machine, with the phase shift between each adjacent phase equal to 72°.
The five-phase motor, as noted in the introduction, opens up additional possibilities for connecting stator windings. These must be envisioned, and the distinction between these relationships must be expressed.
Figure 2 depicts the stator winding connections. This is the fundamental winding connection to the star, as well as the pentagon connection, which is comparable to a triangle connection in a three-phase system. The pentacle connection is another connection that is not common in three-phase machines [
29].
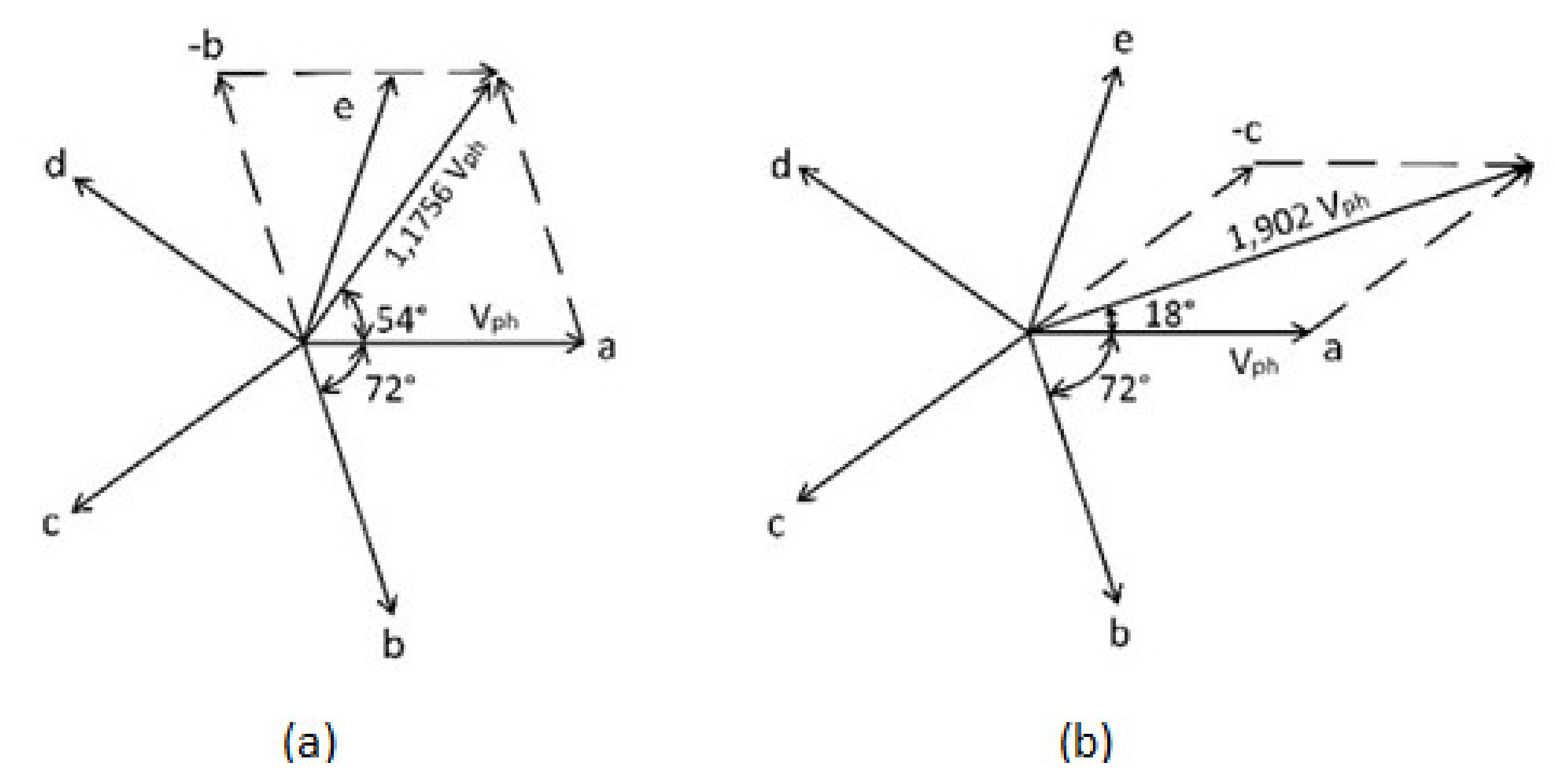
It should be noted that by changing the individual winding connections, the motor will achieve different properties. This fact is given by the phase distribution between the individual connections. This is nice to see in the phase diagrams of the individual connections. It is not necessary to present a phase diagram of the star connection, because the supply voltage applied to the winding phase in this circuit is equal to the supply voltage. When the windings are connected to the pentagon, the voltage from the source of phases
a and
b is closed on the
WA phase of the winding, as can be seen from
Figure 3a. The vector voltage sum of this connection will be on the motor phase 1.1756 times higher than the voltage of the source.
Figure 3b is a phase diagram for a pentacle connection. Here, the voltage between the
a and
c phases of the source is closed on the
WA phase. In this case, the voltage on the motor winding will be 1.902 times higher than the supply voltage. It is because of these facts that it is necessary to realize that the motor in each connection will have different properties [
30,
31].
2.1. Mathematical Model of Five-Phase Induction Motor in Normal Operation
The mathematical description of multiphase machines is an essential element of their research. The mathematical description of a five-phase induction motor in a star connection will be the subject of this subsection. For a motor model in a pentagon or pentacle connection, phase changes between the motor windings must be considered, depending on the connection. As a consequence, the resultant voltage and current amplitude change directly on the motor stator windings without affecting the supply voltage, as seen in
Figure 3.
Using (1) is obtained voltages for a symmetrically distributed and balanced five-phase machine:
Decoupling transformation matrix of the five-phase induction motor model:
Voltage stator and rotor equations in reference
dq frame:
Flux linkages of stator/rotor:
Relation for rotor speed calculation:
where
Rs represents the stator resistance;
Rr—rotor resistance;
Ll—leakage inductance;
Lm— represents the maximum mutual inductance of the stator to the rotor;
U—voltage;
i—current;
ψ—flux linkages;
J—a moment of inertia;
p—number of poles;
TL—load moment;
Te—electromechanical moment;
ωr—angular velocity of the rotor;
ω—angular velocity;
ωa—the angular velocity at which the machine equations of any reference frame are transformed; and
ρF represents
d/dt [
32,
33].
2.2. Mathematical Expression of the Modification of a Four-Phase Operation for a Five-Phase Induction Motor
This subsection provides a detailed mathematical derivation of the phase current adjustment for a sinusoidally distributed MMF for one-phase failure. If one phase is interrupted, either on the motor side, the converter side, or between the motor and the power converter, the resulting MMF changes. For this case is considered the failure of phase
a. The resulting force will be expressed as follows:
As it can be seen from (20), the current through phase a is equal to zero. By expressing this equation and subsequent separation into the real and imaginary part we obtain (21) and (22):
The condition for the MMF to be evenly distributed in the one-phase failure is as follows:
In the following steps, a detailed procedure for deriving the phase
ib current calculation is given. Equations (24) and (25) represent a suitable substitution from (23) for the expression of current
ib:
Relationships (26)–(32) represent the multiplication and expression of currents from (24) and (25):
Thus, (33) is obtained using the formulas for
cos (x) − cos (y) and
sin (x) + sin (y), which is substituted into (32):
By multiplying the (33) and using the formula
cos (x + y), (34) is obtained:
The resulting modifications give the final expression of the current
ib for the adjustment of the operation of the five-phase induction motor in a single-phase failure:
In a similar manner, given in (21)–(35), the equations of the other three currents,
ic,
id, and
ie, are obtained, which are given in (36)–(38):
Graphical Representation of the Modification of the Four-Phase Operation for a Five-Phase Induction Motor
Figure 4 depicts a graphical representation of the foregoing mathematical modification of a five-phase induction motor running in phase failure
a. This lowers torque ripple while increasing efficiency [
34,
35]. The graphic shows that phase
a is open, hence the current
ia is equal to zero. For the remaining four phases, phase shift is determined by (35)–(38).
If we wish to secure the indicated adjustment during the fault condition, we must change phase e by 36° in the direction of rotation and phase b by 36° in the opposite direction of rotation. This will assure a sinusoidal MMF.
To ensure the phase shifts according to
Figure 4, it is necessary to use the special control given in
Section 3.2. This appropriate adjustment of the
alpha,
beta and
x,
y currents will provide the necessary phase shifts of the motor currents.
4. Measurement
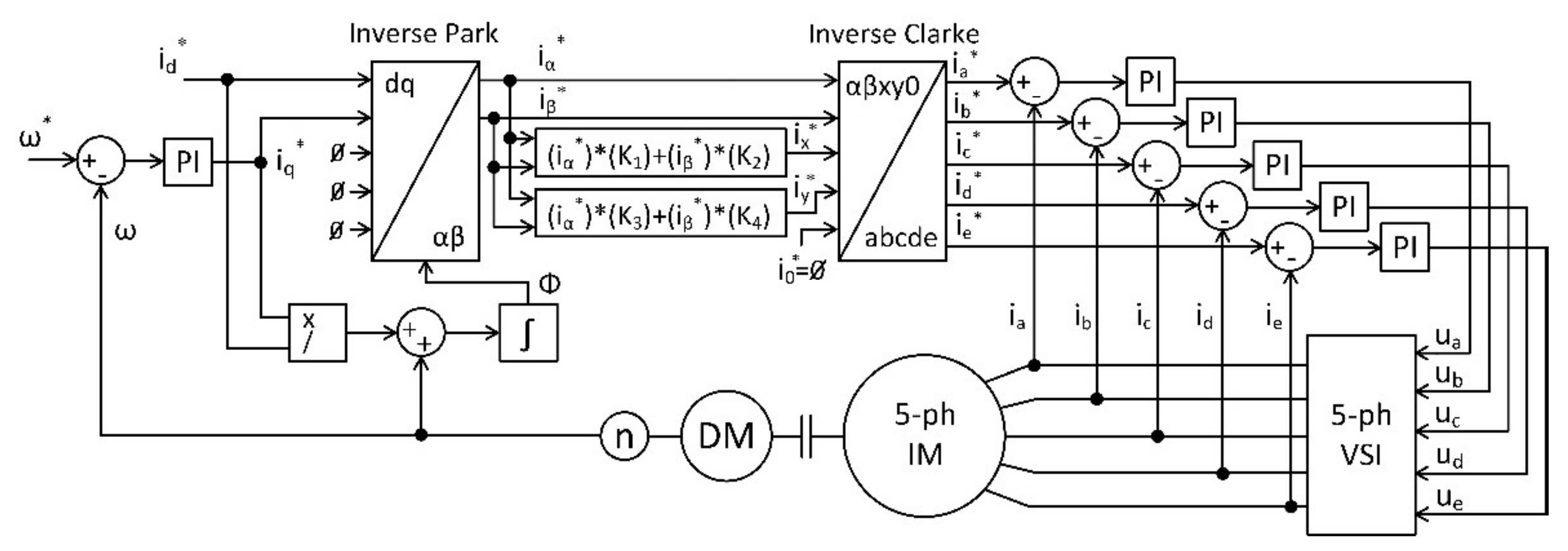
This section contains the results of actual measurements performed on a five-phase induction motor. All measurements were taken for the fault-free state, the fault state without control editing, the edited control to symmetrical currents, and the edited control to unbalanced currents. The control scheme shown in
Figure 5 was used for the first two mentioned states. The scheme in
Figure 6 was used in conjunction with
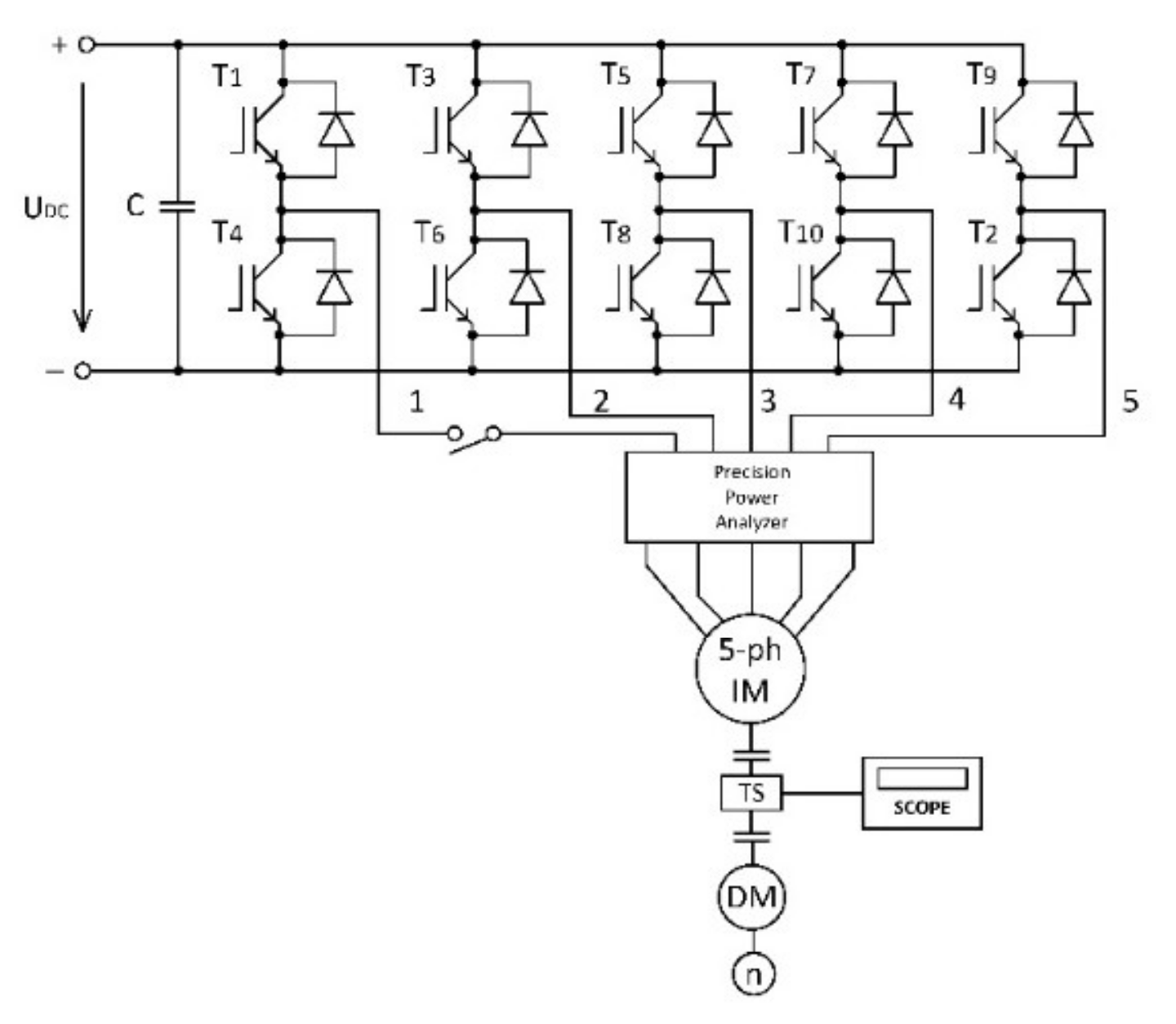
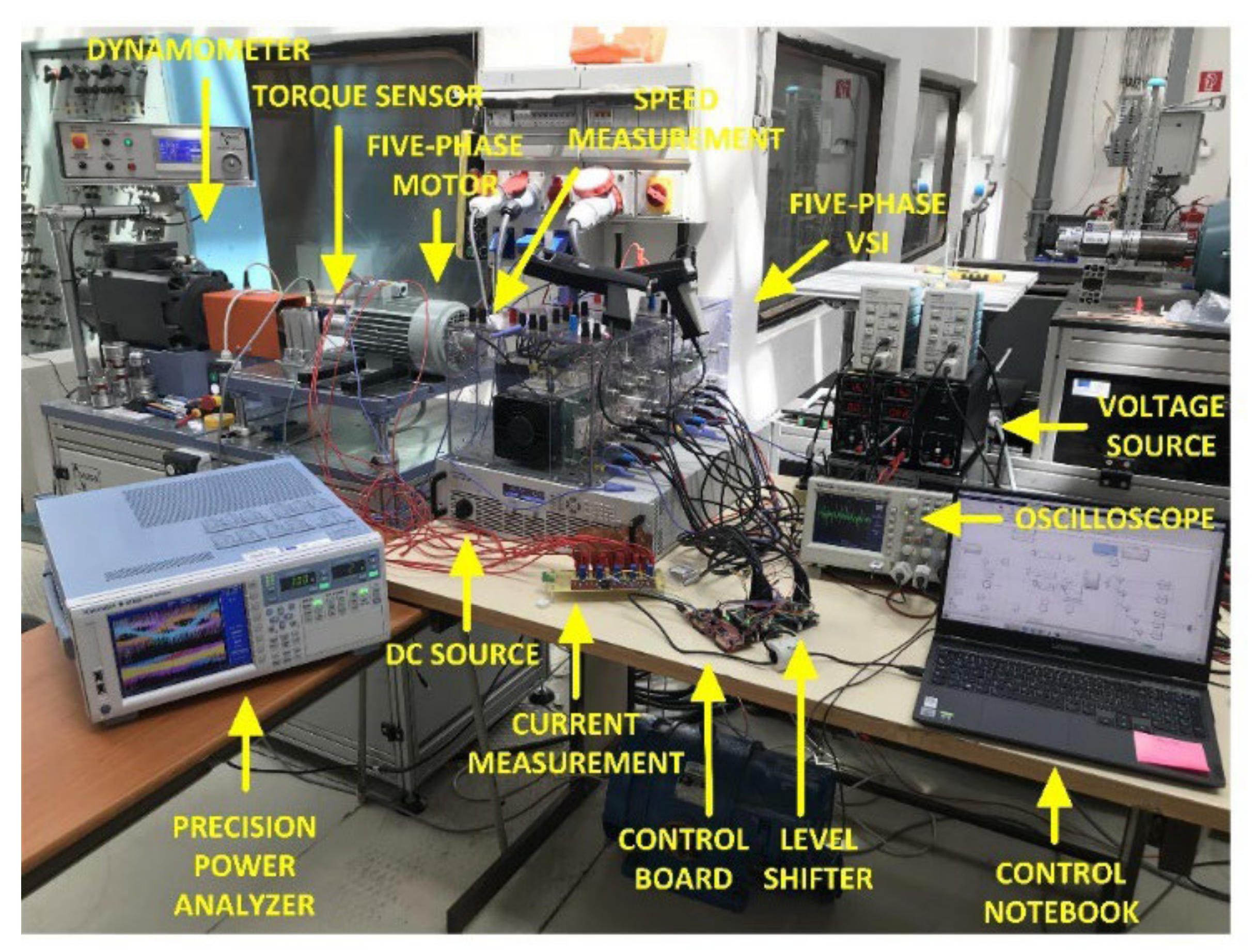
Table 1 for the edited control. The measurement scheme is depicted in
Figure 8 T1 through T10 are VSI switching transistors, TS is the torque sensor, DM is the dynamometer, and n is the speed sensor. The parameters of the measured five-phase induction motor are shown in
Table 2.
4.1. Measuring Efficiency Comparison
The efficiency of a five-phase induction motor was first measured. The measurement was carried out in accordance with the description in the introduction of
Section 4.
Figure 9 depicts the motor efficiency characteristics for all four conditions mentioned. The study is performed out with a nominal motor torque of 3.5 Nm. The blue curve in the figure represents the efficiency of the machine operating without failure and the red curve represents the efficiency of the motor operating in one-phase failure. The gray and yellow curves represent the efficiency during the fault-tolerant control for unbalanced and symmetrical currents, respectively.
The efficiency of the motor decreased by 22.51% in the one-phase failure based on these waveforms for the rated parameters of the motor. This is consistent with the theory presented in
Section 1, where previous research has shown that a single-phase failure reduces motor power and efficiency by 20%, respectively. This can be improved by employing the fault-tolerant control described in
Section 3.2. The motor efficiency characteristics in
Figure 8 show that the modification aided in improving motor efficiency. The greatest loss of efficiency occurs at higher speeds (higher power). For example, at a speed of 2500 rpm, the decrease in motor efficiency was 15.65% for unbalanced currents and 11.43% for symmetrical currents.
Motor efficiency characteristics for reduced machine torques were also performed.
Figure 10 shows the characteristics for a constant torque of 2 Nm, and
Figure 11 shows the characteristics for a motor torque of 1 Nm.
The efficiency characteristics for 2 Nm and 1 Nm show that control editing is still effective and improves motor efficiency with a one-phase failure. In
Figure 10 and
Figure 11, fault-tolerant control implemented on symmetrical currents has better properties than control implemented on unbalanced currents. Because the symmetrically distributed currents ensure a symmetrically distributed load of the individual motor phases, and the machine is also symmetrically heating.
As shown in
Figure 11, the fault-tolerant control to symmetrical currents provides the same efficiency as the fault-free state at reduced torque.
4.2. Measuring the Comparison of Input Powers
Another characteristic that was looked into was the input power at a constant speed. These tests were carried out for three different motor speeds. It should be noted that the measurements were carried out on the same mechanical torque values for all four states, as evidenced by the waveform.
Figure 12 depicts the torque dependence of the input powers and the mechanical power of the motor for a constant speed of 2500 rpm. The waveforms show that in the case of a single-phase failure, the torque must be reduced from 3.5 Nm to 2.7 Nm in order to achieve the rated input power and avoid overloading the power supply system and the motor. This means that the rated motor torque must be reduced by 22.86%. However, if the edited control scheme is used, this decrease is significantly reduced. The nominal torque is reduced by 8.58% when using unbalanced currents and 12.86% when using symmetrical currents.
Figure 12 also shows how the slope of input power increases due to the fault, whereas the slope of mechanical power remains constant. The fault-tolerant control reduces the amount of power drawn from the power supply while increasing machine efficiency.
Figure 13 and
Figure 14 show the same measurement, but at speeds of 1500 rpm and 500 rpm, respectively. With decreasing mechanical torque, the difference between fault-tolerant control for unbalanced currents and symmetrical currents becomes negligible.
4.3. Phase Currents Comparison Measurement
Another thing to remember is that the motor winding is designed for specific power, so the current should not be exceeded. Otherwise, the motor would be overloaded, reducing its service life significantly. In the event of a phase failure, the total current required to achieve the required mechanical torque will be divided into four phases rather than five. This raises the rms value of the current flowing through the motor phases. As a result, we concentrated on measuring the motor phase currents in this subsection. It should also be noted that the currents during phase failure are asymmetric. As a result, the maximum phase current is used for plotting.
Figure 15 depicts the relationship between the maximum rms currents flowing through the stator phases and the mechanical torque in all four investigated states. According to these waveforms, in order to maintain the rated current of the motor phases, the rated torque must be reduced by 59.43% in the event of a phase failure, i.e., from 3.5 Nm to 1.42 Nm. The decrease is 57.15% when using the unbalanced current control adjustment, and 30.85% when using the symmetrical current control adjustment.
Figure 16 and
Figure 17 show the motor phase currents as a function of mechanical torque for motor speeds of 1500 rpm and 500 rpm, respectively.
The measurements in
Section 4.2 and
Section 4.3 show that the required decrease in moments varies for these two criteria.
Section 4.2 describes the necessary reduction in rated torque due to power supply system loading, i.e., the input power cannot exceed nominal values, which is critical for the operation of EV and HEV.
Section 4.3, on the other hand, represents the necessary reduction in rated torque in relation to motor loading. However, it should be noted that each machine is designed with some power oversizing, so only the criterion in
Section 4.2 must be met for a single-fault condition and control modifications.
4.4. Comparison of Torque Ripple Reduction
The application of a fault-tolerant control strategy has a significant impact on torque ripple during motor operation in phase failure. Torque ripple is closely related to motor noise, and this is an important parameter to consider when designing electric motors for EV and HEV. As a result, it is critical to eliminate it as much as possible when the motor is in a fault state.
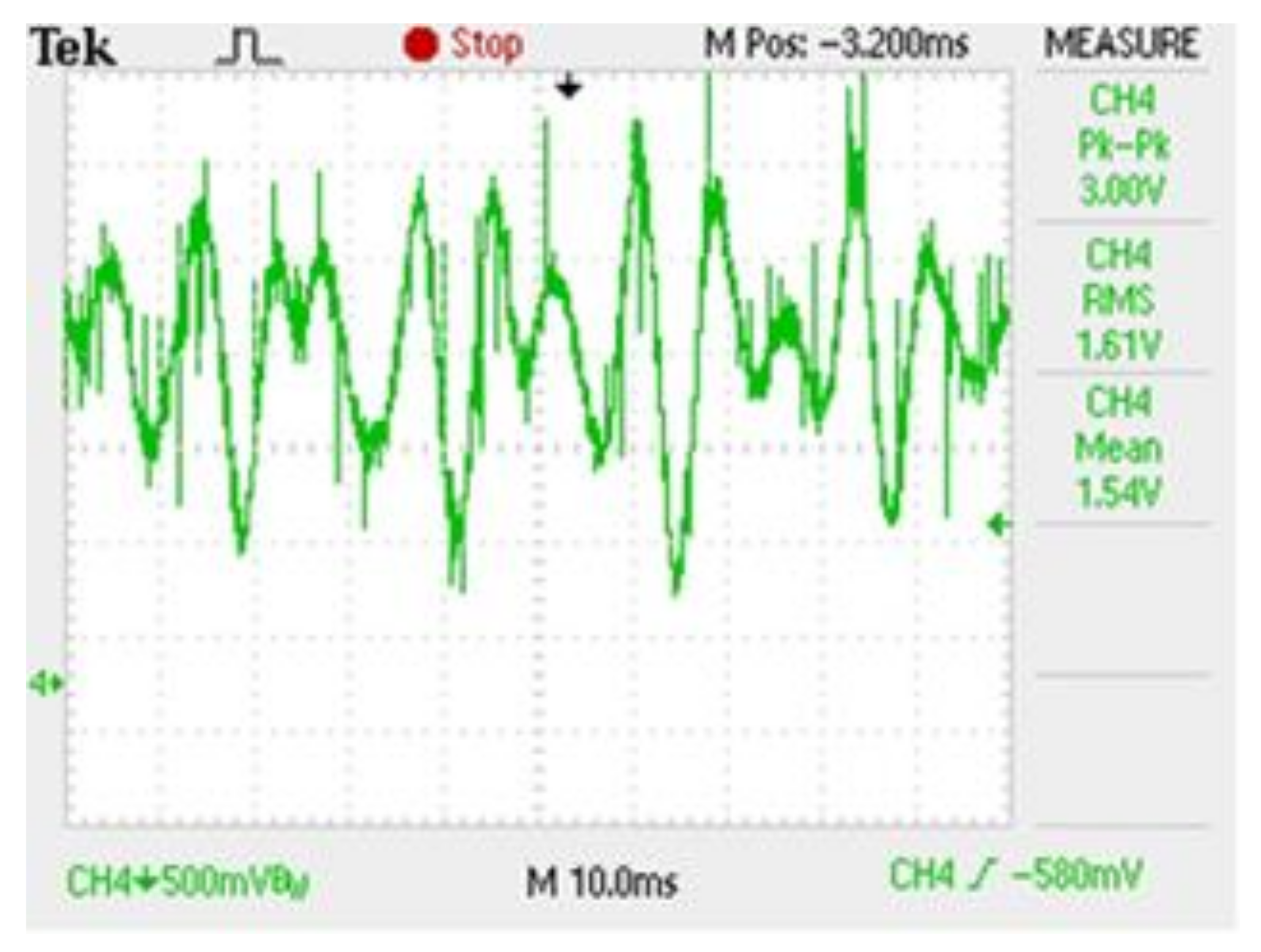
This section shows the torque ripple waveforms for each of the four conditions. At a rated load of 3.5 Nm, the motor speed was 2500 rpm. The ripple was measured using a torque sensor with a range of 20 Nm, while 10 V at the sensor output equals 20 Nm.
The waveforms show that the torque ripple was approximately ±2 Nm during normal operation (Peak to Peak). The torque ripple increased to ±8.8 Nm in
Figure 18 during the one-phase failure operation. This represents an increase of up to 440%, which is unacceptably high for an engine operating as an electric vehicle. We were able to reduce the magnitude of the torque ripple to unbalanced currents to ±5.6 Nm using fault-tolerant control and to approximately ±3.8 Nm using symmetrical currents. This represents a more than 50% improvement in the ripple compared to the fault condition.
Figure 22 depicts the torque ripple path for a nominal motor torque of T = 3.5 Nm. The characteristics were covered by a linear line. The torque ripple waveforms show that changing the control to symmetrical currents produces almost identical ripple to normal operation.
6. Discussion
This article focused on the control of a five-phase induction motor operating in a one-phase fault. The goal of the article was to present a complete mathematical derivation of modeling a five-phase induction motor in a single-phase fault and its modification, which is presented in
Section 2.
Another major goal was to introduce a new, modified fault-tolerant control scheme that can be easily applied to induction motors with any number of phases without requiring any hardware modifications. The entire process of adjusting the control scheme is carried out through software. It also allows for very simple customization for other engines. This is an important aspect of this study.
Section 3 describes this control scheme. The control scheme is based on the equations presented in
Section 2, and the operation principle is described in detail in the article.
The third goal was to conduct a thorough comparison of the characteristics of the motor in normal operation, one-phase fault operation, and fault-tolerant control modifications when using the new control scheme. We looked at all of the above scenarios to see how much it is possible to improve the motor qualities by changing the control, as opposed to failure without change using the new fault-tolerant scheme. As stated in the article, there are several possible combinations that, when combined with a fault-tolerant control scheme, improve machine characteristics. As a result, we provided two options for modifying the control in the article, as described in
Section 3.2.
Section 4 contains detailed measurements of a real five-phase induction motor with a nominal power of 1.1 kW. To begin, motor efficiency was compared in all four states: normal operation, one-phase fault operation, control editing to unbalanced currents, and control editing to symmetrical currents. The measured torque was the rated load torque. According to these courses, the decrease in efficiency at failure compared to normal operation is 22.51%, as shown in
Figure 9 This is consistent with the theory that the motor can run with a 20% drop in one-phase failure without editing. Using a fault-tolerant control strategy, we were able to increase engine efficiency. When using unbalanced current control, the reduction was reduced to 15.65% when compared to fault operation. It was only 11.43% when using symmetrical current control. According to the motor efficiency characteristics for reduced load torque, using symmetrical current control provides nearly the same efficiency, as shown in
Figure 10 and
Figure 11.
Following that, we concentrated on the comparison of input powers, which is critical for the operation of a motor powered by traction batteries.
Section 4.2 describes the input power characteristics for all conditions based on mechanical torque and constant engine speed. These waveforms (
Figure 12,
Figure 13 and
Figure 14) show that in the event of a one-phase failure, the nominal torque must be reduced by 22.86% in order to maintain the same input power as in normal operation. We reduced this to 12.86% for unbalanced currents and 8.58% for symmetrical currents by using fault-tolerant control. Because of the power supply system, this measurement must be known. The motor in an EV or HEV is powered by traction batteries, and a failure of one phase would change the amount of power consumed and thus the vehicle range. As a result, the nominal/maximum torque must be reduced.
The following step concentrated on the phase stator currents in all four cases. The currents in the motor will increase during the fault, and their symmetry will be unbalanced. According to the waveforms in
Section 4.3 (
Figure 15,
Figure 16 and
Figure 17), the rated motor torque must be reduced by 59.43% in order to maintain the original power load of the motor phases. When using fault-tolerant control on nonsymmetrical currents, they are reduced by 57.15% and symmetrical currents are reduced by 30.85%.
The torque ripple Is a critical factor in electric motors. The sinusoidal MMF has a low torque ripple. However, if there is a failure, the motor ripple is extremely large. In our case, the motor ripple increased from 2 Nm to 8.8 Nm when a fault occurred, as shown in
Figure 18 and
Figure 19. This equates to a 440% increase. This could have serious consequences for the vehicle’s other systems or mechanical properties, as well as the engine itself. Again, the use of the new fault-tolerant control reduced the size of the ripple, as shown in
Figure 20 and
Figure 21; for editing unbalanced currents, to 5.6 Nm, and symmetrical currents, to 3.8 Nm.
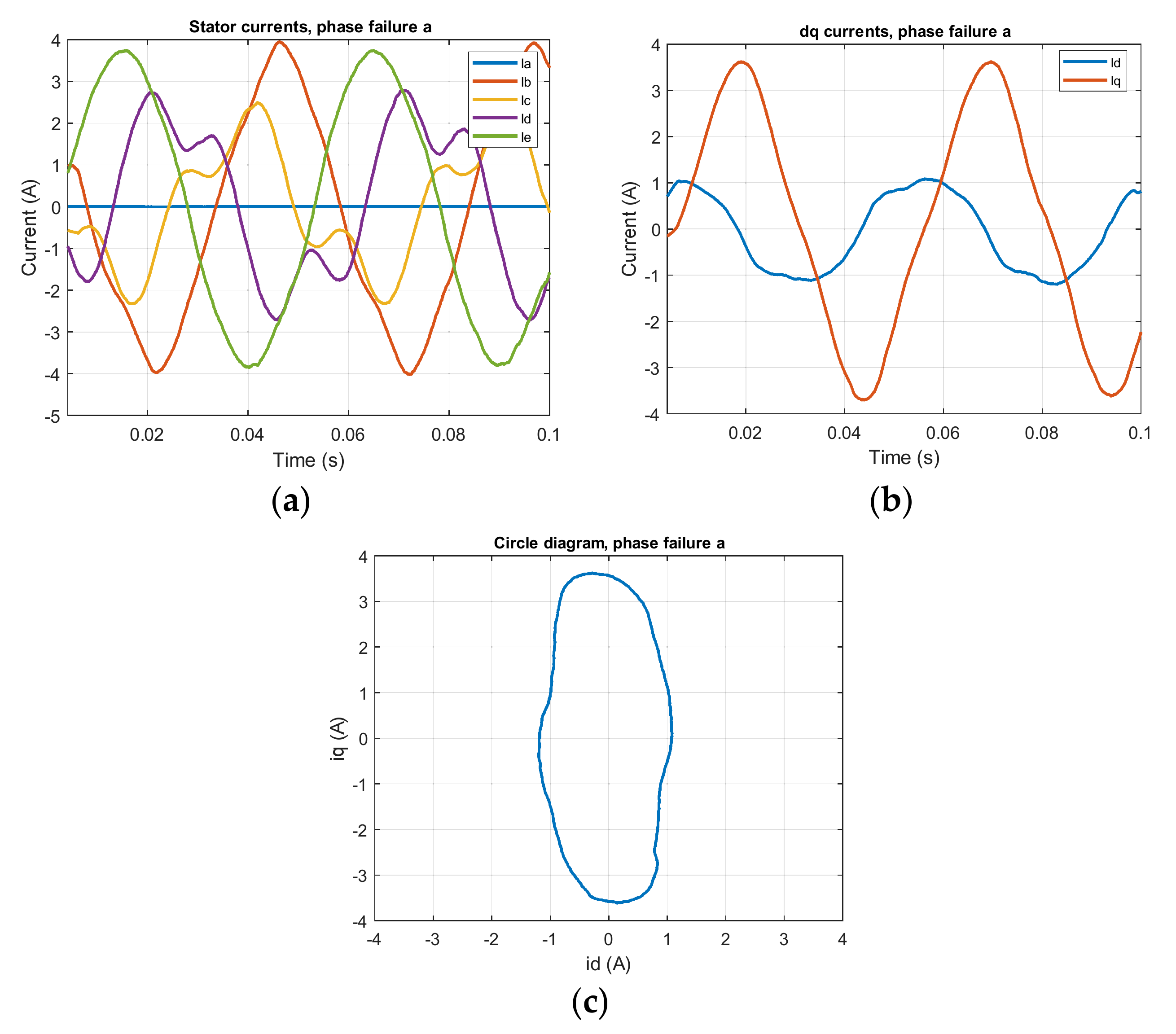
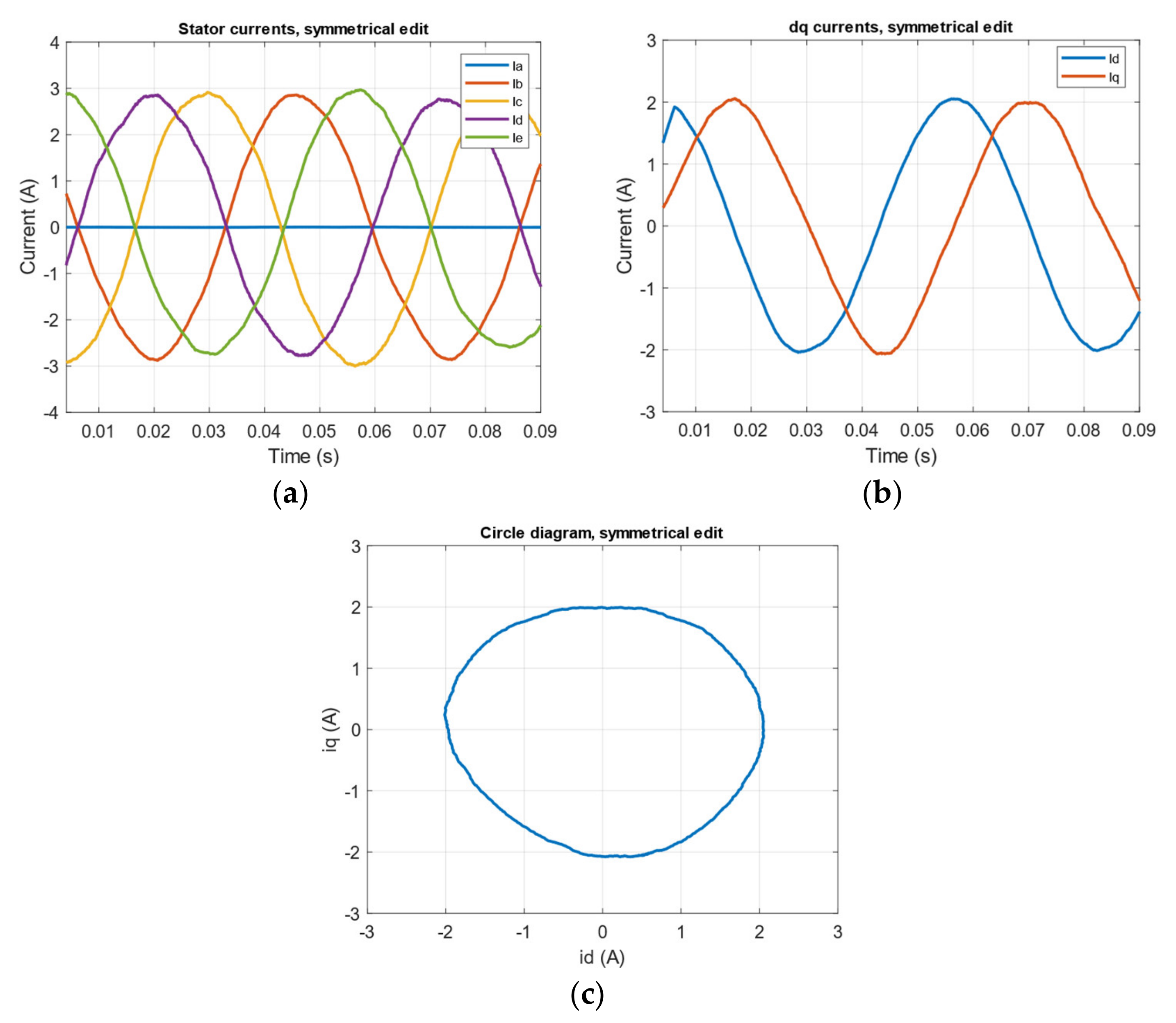
Section 5 made use of the measured currents obtained during the measurements. Using the Matlab environment, circle diagrams of
dq currents were created. It is possible to see the MMF distribution in the stator.
Section 5 goes into this in detail.
7. Conclusions
This paper presents an investigation into the possibilities of fault-tolerant control for a five-phase induction motor. The electric motor is now a necessary component of automobile operation. As a result, the motor operation options during a breakdown must be presented. As shown in
Section 1, we began this article by presenting current research and findings in the field of control of a five-phase induction motor in a one-phase failure operation.
Mathematical modeling and derivation of a five-phase induction motor are critical for understanding the motor’s overall operation, as well as a failure of one phase and a possible modification. As a result, in the following section, we provided a thorough mathematical derivation of the modeling equations of a five-phase induction machine. This section will help you understand fault-tolerant control for a five-phase induction motor in depth.
The following section of the paper goes over the control strategies used during normal operation measurements. The following describes a new fault-tolerant control technique. The article goes into great detail about how this control method works. This section also includes a thorough mathematical derivation and calculations for fault-tolerant control. The new fault-tolerant control scheme is intended to meet the requirement of any multiphase induction motor for simple control implementation.
After that, we ran a series of tests on a real five-phase induction motor to see how much of an effect using a fault-tolerant control system had on the motor characteristics. Then we compared it to a one-phase fault operating motor that had not been altered in any way. Based on the observed efficiency, power, currents, torques, and torque ripple, we know how to improve and maximize a load of a five-phase induction motor in a single-phase fault, such as in EV or HEV drive operation.
The results of the experiments in
Section 4 and
Section 5 show that implementing our proposed control strategy improves the characteristics of the motor operating in a one-phase fault. The specific outcomes of engine performance enhancement were discussed in the article discussion section.

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}