
Algorithm for an Effective Ratio of the Transverse Bending Rigidity Based on the Segment Joint Bending Stiffness


Abstract
:1. Introduction
2. Algorithm of the Effective Ratio of the Transverse Bending Rigidity
2.1. Equivalent Equation of Transverse Bending Rigidity
2.2. Reduction of Bending Rigidity by Reducing the Elastic Modulus
2.3. Reduction of Bending Rigidity by Reducing the Moment of Inertia
- (1)
- The first method of reducing the moment of inertia.
- (2)
- The second method of reducing the moment of inertia.
3. Verification of the Algorithm
3.1. Verification Sample
3.2. Values of the Effective Ratio for the Transverse Bending Rigidity Based on the Full-Scale Test
3.3. Verification Analysis
4. Conclusions
- (1)
- Based on the assumption of the equivalence for transverse bending rigidity between the installed segment ring and the modified uniform rigidity ring, an algorithm to determine the effective ratio of the transverse bending rigidity was obtained. Compared with the traditional methods for determining the effective ratio, the algorithm proposed in this article is simpler and more elegant conceptually. Moreover, the algorithm can express the correlation between the effective ratio and its influencing factors, such as the longitudinal joint bending stiffness, diameter of the segment ring, thickness of the segment, and number of joints. From the process of deriving the algorithm, it is noted that the essence of converting an installed segment ring into a modified uniform rigidity ring is to evenly allocate the weakness of the bending rigidity caused by longitudinal joints to all the sections of the modified uniform rigidity ring.
- (2)
- Through the comparison of the values for the effective ratio of the transverse bending rigidity, which are calculated with different methods, it is noted that the effective ratios calculated using the algorithm proposed in this article are similar to those calculated by the method proposed by Ye but are visibly different from those calculated by the method proposed by Yukinori. Because the convergence deformations of a modified uniform rigidity ring are similar to those of an installed segment ring under the same loading condition, it is verified that the algorithm for determining the effective ratio of the transverse bending rigidity proposed in this article is valid.
- (3)
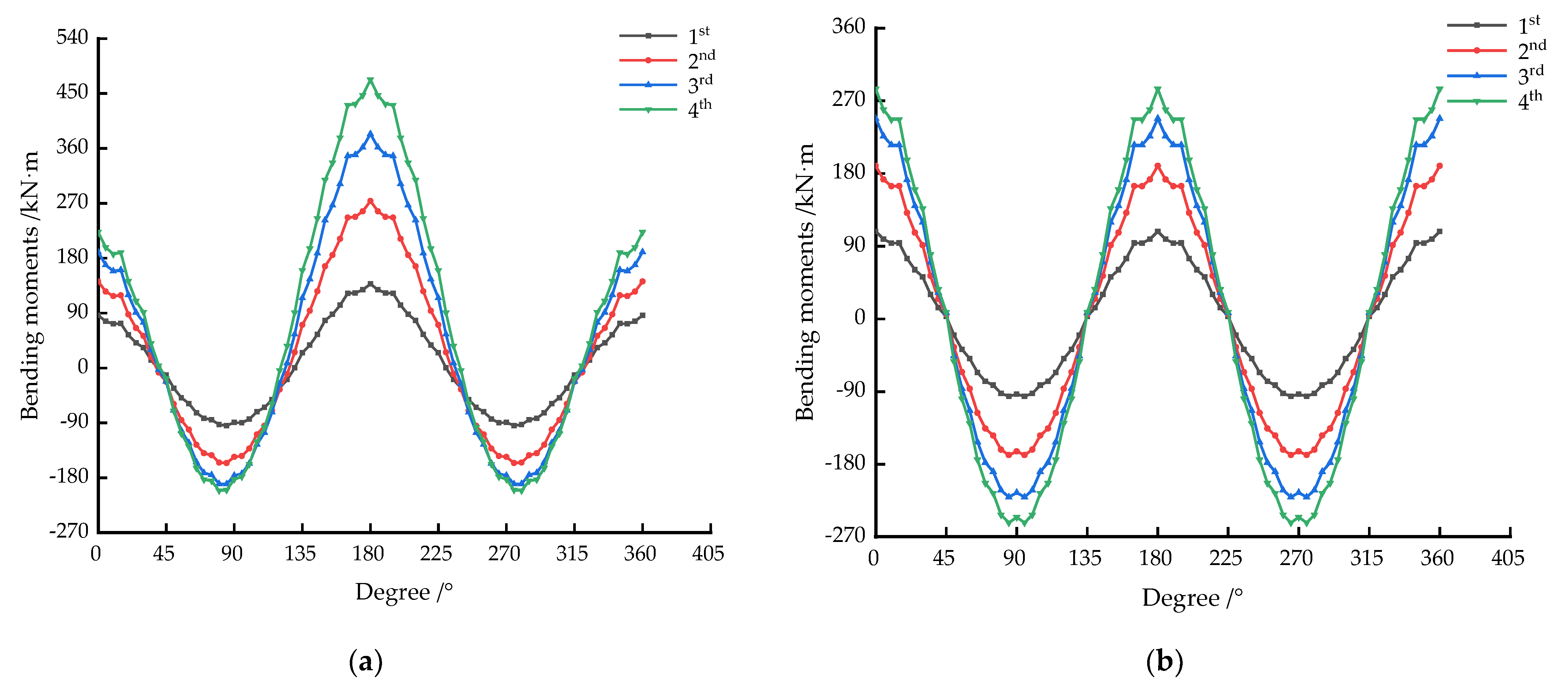
- The analysis shows that the distribution modes for the bending rigidity for the two models, the beam-spring model and the modified uniform rigidity ring model, are different, which leads to a significant difference in the distribution of bending moments. Therefore, the modified uniform rigidity ring model is not applicable for the bending moment design of a tunnel structure.
- (4)
- Under the same loading condition, the axial forces, horizontal convergence deformations, and vertical convergence deformations for both models (the beam-spring model and the modified uniform rigidity ring model) are similar. Thus, the modified uniform rigidity ring model is applicable for the analysis of the structure convergence deformation and the interaction between the tunnel structure and the ground during operation.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ai, Q.; Yuan, Y.; Mahadevan, S.; Jiang, X.M. Probabilistic degradation modelling of circular tunnels assembled from segmental linings. Struct. Concrete 2016, 17, 257–273. [Google Scholar] [CrossRef]
- Wang, F.; Shi, J.K.; Huang, H.W.; Zhang, D.M. Modified analytical solution of shield tunnel lining considering nonlinear bending stiffness of longitudinal joint. Tunn. Undergr. Space Technol. 2020, 106, 103625. [Google Scholar] [CrossRef]
- Lee, K.M.; Hou, X.Y.; Ge, X.W.; Tang, Y. An analytical solution for a jointed shield-driven tunnel lining. Int. J. Numer. Anal. Methods Geomech. 2001, 25, 365–390. [Google Scholar] [CrossRef]
- Lee, K.M.; Ge, X.W. The equivalence of a jointed shield-driven tunnel lining to a continuous ring structure. J. Can. Geotech. Eng. 2001, 38, 461–483. [Google Scholar] [CrossRef]
- Takamatsu, N.; Yoshida, K.; Koizumi, A. In-situ tests and consideration on shield tunnel in the longitudinal direction. J. Geotech. Eng. 1986, 1986, 131–140. [Google Scholar] [CrossRef] [Green Version]
- Koizumi, A.; Murakami, H.; Nishino, K. Study on the analytical model of shield tunnel in longitudinal direction. J. Geotech. Eng. 1988, 1988, 79–88. [Google Scholar] [CrossRef] [Green Version]
- Koizumi, A.; Murakami, H.; Takamatsu, N. Design method of segments at sharply curved section. J. Geotech. Eng. 1992, 1992, 111–120. [Google Scholar] [CrossRef] [Green Version]
- Zhu, H.H.; Cui, M.Y.; Yang, J.S. Design model for shield lining segments and distribution of load. Chin. J. Geotech. Eng. 2000, 22, 190–194. (In Chinese) [Google Scholar] [CrossRef]
- Huang, Z.R. Study on the Mechanics Character of Shield Tunnel Segment with Shell-Spring Model. Ph.D. Thesis, Hohai University, Nanjing, China, 2007. [Google Scholar]
- Gong, C.J.; Ding, W.Q.; Mosalam, K.M.; Selim, G.; Soga, K. Comparison of the structural behavior of reinforced concrete and steel fiber reinforced concrete tunnel segmental joints. Tunn. Undergr. Space Technol. 2017, 68, 38–57. [Google Scholar] [CrossRef]
- Liu, X.; Fang, Q.; Zhang, D.L. Mechanical responses of existing tunnel due to new tunnelling below without clearance. Tunn. Undergr. Space Technol. 2018, 80, 44–52. [Google Scholar] [CrossRef]
- He, H.; Zhou, S.H.; Guo, P.J.; Di, H.G.; Zhang, X.H. A theoretical model on the influence of ring joint stiffness on dynamic responses from underground tunnels. Constr. Build. Mater. 2019, 223, 69–80. [Google Scholar] [CrossRef]
- Li, S.H.; Li, P.F.; Zhang, M.J. Analysis of additional stress for a curved shield tunnel. Tunn. Undergr. Space Technol. 2021, 107, 103675. [Google Scholar] [CrossRef]
- Koyoma, Y.; Nishimura, T. The design of lining segment of shield tunnel using a beam-spring model. Proc. Tunn. Eng. JSCE 1997, 7, 279–284. [Google Scholar] [CrossRef]
- Working Group No.2, International Tunnelling Association. Guidelines for the design of shield tunnel lining. Tunn. Undergr. Space Technol. 2000, 15, 303–331. [Google Scholar] [CrossRef]
- Zhong, X.C.; Zhu, W.; Huang, Z.R.; Han, Y.W. Effect of joint structure on joint bending stiffness for shield tunnel lining. Tunn. Undergr. Space Technol. 2006, 21, 406–407. [Google Scholar] [CrossRef]
- Song, K.I.; Cho, G.C.; Chang, S.B.; Lee, I.M. Beam–spring structural analysis for the design of a tunnel pre-reinforcement support system. Int. J. Rock Mech. Min. Sci. 2013, 59, 139–150. [Google Scholar] [CrossRef]
- Do, N.A.; Dias, D.; Oreste, P.; Djeran-Maigre, I. The behaviour of the segmental tunnel lining studied by the hyperstatic reaction method. Eur. J. Environ. Civ. Eng. 2014, 18, 489–510. [Google Scholar] [CrossRef]
- Pham, A.T.; Sugimoto, M. The Effects of Tangential Ground–Lining Interaction on Segmental Lining Behavior Using the Beam-Spring Model. Appl. Sci. 2020, 10, 1084. [Google Scholar] [CrossRef] [Green Version]
- Yukinori, K. Present status and technology of shield tunneling method in Japan. Tunn. Undergr. Space Technol. 2003, 18, 145–159. [Google Scholar] [CrossRef]
- Lei, M.F.; Lin, D.Y.; Shi, C.H.; Ma, J.J.; Yang, W.C. A Structural Calculation Model of Shield Tunnel Segment: Heterogeneous Equivalent Beam Model. Adv. Civ. Eng. 2018, 2018, 9637838. [Google Scholar] [CrossRef] [Green Version]
- Kashima, Y.; Kondo, N.; Inoue, M. Development and application of the DPLEX shield method: Results of experiments using shield and segment models and application of the method in tunnel construction. Tunn. Undergr. Space Technol. 1996, 11, 45–50. [Google Scholar] [CrossRef]
- Blom, C.B.M. Design Philosophy of Concrete Linings for Tunnels in Soft Soils. Ph.D. Thesis, Technische Universiteit Delft, Delft, The Netherlands, 2002. [Google Scholar]
- Ye, F.; Gou, C.F.; Sun, H.D.; Xia, Y.X.; Zhou, Z. Model test study on effective ratio of segment bending rigidity of shield tunnel. Tunn. Undergr. Space Technol. 2014, 41, 193–205. [Google Scholar] [CrossRef]
- Li, X.J.; Zhou, X.Z.; Hong, B.C.; Zhu, H.H. Experimental and analytical study on longitudinal bending behavior of shield tunnel subjected to longitudinal axial forces. Tunn. Undergr. Space Technol. 2019, 86, 128–137. [Google Scholar] [CrossRef]
- Geng, P.; Mei, S.Y.; Zhang, J.; Chen, P.L.; Zhang, Y.Y.; Yan, Q.X. Study on seismic performance of shield tunnels under combined effect of axial force and bending moment in the longitudinal direction. Tunn. Undergr. Space Technol. 2019, 91, 103004. [Google Scholar] [CrossRef]
- Teachavorasinskun, S.; Chub-Uppakarn, T. Influence of segmental joints on tunnel lining. Tunn. Undergr. Space Technol. 2010, 25, 490–494. [Google Scholar] [CrossRef]
- Gong, W.P.; Wang, L.; Juang, C.H.; Zhang, J.; Huang, H.W. Robust geotechnical design of shield-driven tunnels. Comput. Geotech. 2014, 56, 191–201. [Google Scholar] [CrossRef]
- Yu, H.T.; Cai, C.; Bobet, A.; Zhao, X.; Yuan, Y. Analytical solution for longitudinal bending stiffness of shield tunnels. Tunn. Undergr. Space Technol. 2019, 83, 27–34. [Google Scholar] [CrossRef]
- Lu, L.; Sun, Y.F.; Liu, X.; Wang, X.Z.; Wang, W.P. Full-ring experimental study on the ultimate bearing capacity for the lining structure of the metro shield tunnel. Struct. Eng. 2012, 28, 134–139. (In Chinese) [Google Scholar] [CrossRef]
- Fang, Q.; Wang, G.; Yu, F.C.; Du, J.M. Analytical algorithm for longitudinal deformation profile of a deep tunnel. J. Rock Mech. Geotech. Eng. 2021, 13, 845–854. [Google Scholar] [CrossRef]
- Zhong, X.C.; Zhang, J.R.; Qin, J.S.; Zhu, W. Simplified calculation model for longitudinal equivalent bending stiffness of shield tunnel and its influence factors’ analysis. Rock Soil Mech. 2011, 32, 132–136. (In Chinese) [Google Scholar] [CrossRef]
- Ding, W.Q.; Gong, C.J.; Mosalam, K.M.; Soga, K. Development and application of the integrated sealant test apparatus for sealing gaskets in tunnel segmental joints. Tunn. Undergr. Space Technol. 2017, 63, 54–68. [Google Scholar] [CrossRef]
- Do, N.A.; Dias, D.; Oreste, P.; Djeran-Maigre, I. 2D numerical investigation of segmental tunnel lining behavior. Tunn. Undergr. Space Technol. 2013, 37, 115–127. [Google Scholar] [CrossRef]
- Li, P.F.; Wei, Y.J.; Zhang, M.J.; Huang, Q.F.; Wang, F. Influence of non-associated flow rule on passive face instability for shallow shield tunnels. Tunn. Undergr. Space Technol. 2021, 119, 104202. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Loading Conditions | Actual Load P1/kN | Actual Load P2/kN | Actual Load P3/kN | Deformation Results of Different Testing Point/mm | |||||
|---|---|---|---|---|---|---|---|---|---|
| 0° | 74° | 105° | 180° | 255° | 286° | ||||
| 1st | 95.32 | 45.98 | 71.49 | −6.44 | 6.45 | 3.93 | −2.48 | 2.03 | 4.78 |
| 2nd | 163.15 | 76.83 | 122.36 | −22.18 | 21.51 | 12.48 | −7.3 | 8.66 | 18.54 |
| 3rd | 213.02 | 99.97 | 159.76 | −63.09 | 55.66 | 32.18 | −18.79 | 28.72 | 55.21 |
| 4th | 248.92 | 119.24 | 186.69 | −107.89 | 94.36 | 55.21 | −31.54 | 48.01 | 92.55 |
| Loading Conditions | k1/106 N·m/rad | k2/106 N·m/rad | k3/106 N·m/rad |
|---|---|---|---|
| 1st | 34 | 28 | 50 |
| 2nd | 13 | 10 | 21 |
| 3rd | 6 | 4 | 9 |
| 4th | 4.2 | 2.5 | 7 |
| Loading Conditions | ||||
|---|---|---|---|---|
| 1st | 0.4149 | 0.7459 | 0.4212 | 0.7496 |
| 2nd | 0.2119 | 0.5962 | 0.217 | 0.6009 |
| 3rd | 0.1026 | 0.4682 | 0.1059 | 0.4731 |
| 4th | 0.0718 | 0.4156 | 0.0742 | 0.4203 |
| Loading Conditions | Uniform Rigidity Ring | Installed Segment Ring | ||
|---|---|---|---|---|
| 1st | 3.61 | −3.86 | 9.08 | −9.76 |
| 2nd | 6.34 | −6.76 | 31.52 | −33.17 |
| 3rd | 8.31 | −8.85 | 84.94 | −87.71 |
| 4th | 9.5 | −10.14 | 139.18 | −143.01 |
| Loading Conditions | ||
|---|---|---|
| 1st | 0.9991 | 0.3976 |
| 2nd | 0.996 | 0.2013 |
| 3rd | 0.9878 | 0.0979 |
| 4th | 0.9795 | 0.0683 |
| Loading Conditions | ||||||
|---|---|---|---|---|---|---|
| Horizontal | Vertical | Horizontal | Vertical | Horizontal | Vertical | |
| 1st | 8.8 | −9.18 | 9.08 | −9.7 | 3.61 | −3.86 |
| 2nd | 30.44 | −31.34 | 31.52 | −33.57 | 6.37 | −6.78 |
| 3rd | 82.6 | −84.48 | 84.94 | −90.44 | 8.42 | −8.96 |
| 4th | 135.28 | −138.14 | 139.18 | −148.5 | 9.7 | −10.35 |
| Loading Conditions | Deformations of Beam-Spring Model/mm | Deformations of Modified Uniform Rigidity Ring Model/mm | ||||||
|---|---|---|---|---|---|---|---|---|
| 0° | 90° | 180° | 270° | 0° | 90° | 180° | 270° | |
| 1st | −6.37 | 4.54 | −3.39 | 4.54 | −4.59 | 4.4 | −4.59 | 4.4 |
| 2nd | −23.5 | 15.76 | −9.67 | 15.76 | −15.67 | 15.22 | −15.67 | 15.22 |
| 3rd | −65.13 | 42.47 | −22.58 | 42.47 | −42.24 | 41.3 | −42.24 | 41.3 |
| 4th | −107.57 | 69.59 | −35.44 | 69.59 | −69.07 | 67.64 | −69.07 | 67.64 |
| Loading Conditions | Bending Moments of Beam-Spring Model/kN·m | Bending Moments of Modified Uniform Rigidity Ring Model/kN·m | ||||||
|---|---|---|---|---|---|---|---|---|
| 0° | 90° | 180° | 270° | 0° | 90° | 180° | 270° | |
| 1st | 86.3 | −89.4 | 137.9 | −89.4 | 108.3 | −93.2 | 108.3 | −93.2 |
| 2nd | 141.9 | −145.7 | 273.8 | −145.7 | 189.4 | −164.1 | 189.4 | −164.1 |
| 3rd | 190.2 | −176.2 | 383.8 | −176.2 | 248.1 | −215.1 | 248.1 | −215.1 |
| 4th | 222.6 | −182.4 | 472.8 | −182.4 | 284.7 | −245.4 | 284.7 | −245.4 |
| Loading Conditions | Axial Forces of Beam-Spring Model/kN | Axial Forces of Modified Uniform Rigidity Ring Model/kN | ||||||
|---|---|---|---|---|---|---|---|---|
| 0° | 90° | 180° | 270° | 0° | 90° | 180° | 270° | |
| 1st | −227.4 | −287.4 | −209.8 | −287.4 | −218.6 | −287.3 | −218.6 | −287.3 |
| 2nd | −392.3 | −490.5 | −347.2 | −490.5 | −369.8 | −490.3 | −369.8 | −490.3 |
| 3rd | −515.1 | −640.2 | −448.9 | −640.2 | −482 | −639.9 | −482 | −639.9 |
| 4th | −611.7 | −749.9 | −526.2 | −749.9 | −568.9 | −749.6 | −568.9 | −749.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, D.; Jiang, H.; Luo, W.; Xiong, H.; Tang, B.; Xu, J. Algorithm for an Effective Ratio of the Transverse Bending Rigidity Based on the Segment Joint Bending Stiffness. Appl. Sci. 2022, 12, 1901. https://doi.org/10.3390/app12041901
Huang D, Jiang H, Luo W, Xiong H, Tang B, Xu J. Algorithm for an Effective Ratio of the Transverse Bending Rigidity Based on the Segment Joint Bending Stiffness. Applied Sciences. 2022; 12(4):1901. https://doi.org/10.3390/app12041901
Chicago/Turabian StyleHuang, Dawei, Hao Jiang, Wenjun Luo, Hao Xiong, Baizan Tang, and Jinhui Xu. 2022. "Algorithm for an Effective Ratio of the Transverse Bending Rigidity Based on the Segment Joint Bending Stiffness" Applied Sciences 12, no. 4: 1901. https://doi.org/10.3390/app12041901
APA StyleHuang, D., Jiang, H., Luo, W., Xiong, H., Tang, B., & Xu, J. (2022). Algorithm for an Effective Ratio of the Transverse Bending Rigidity Based on the Segment Joint Bending Stiffness. Applied Sciences, 12(4), 1901. https://doi.org/10.3390/app12041901