
Estimating Volume Loss for Shield-Driven Tunnels Based on the Principle of Minimum Total Potential Energy


Abstract
:1. Introduction
2. Problem Description
3. Principle of Minimum Total Potential Energy
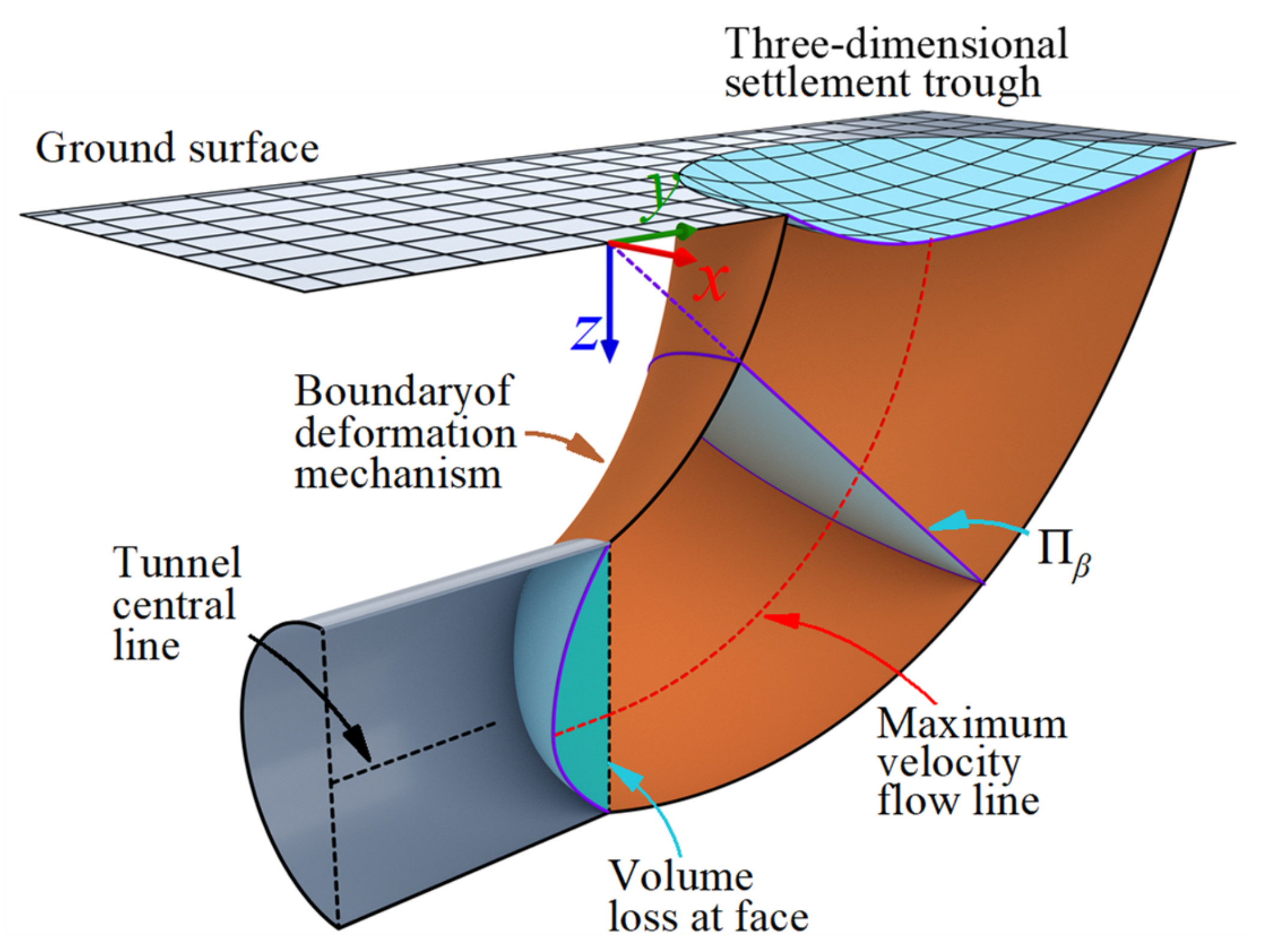
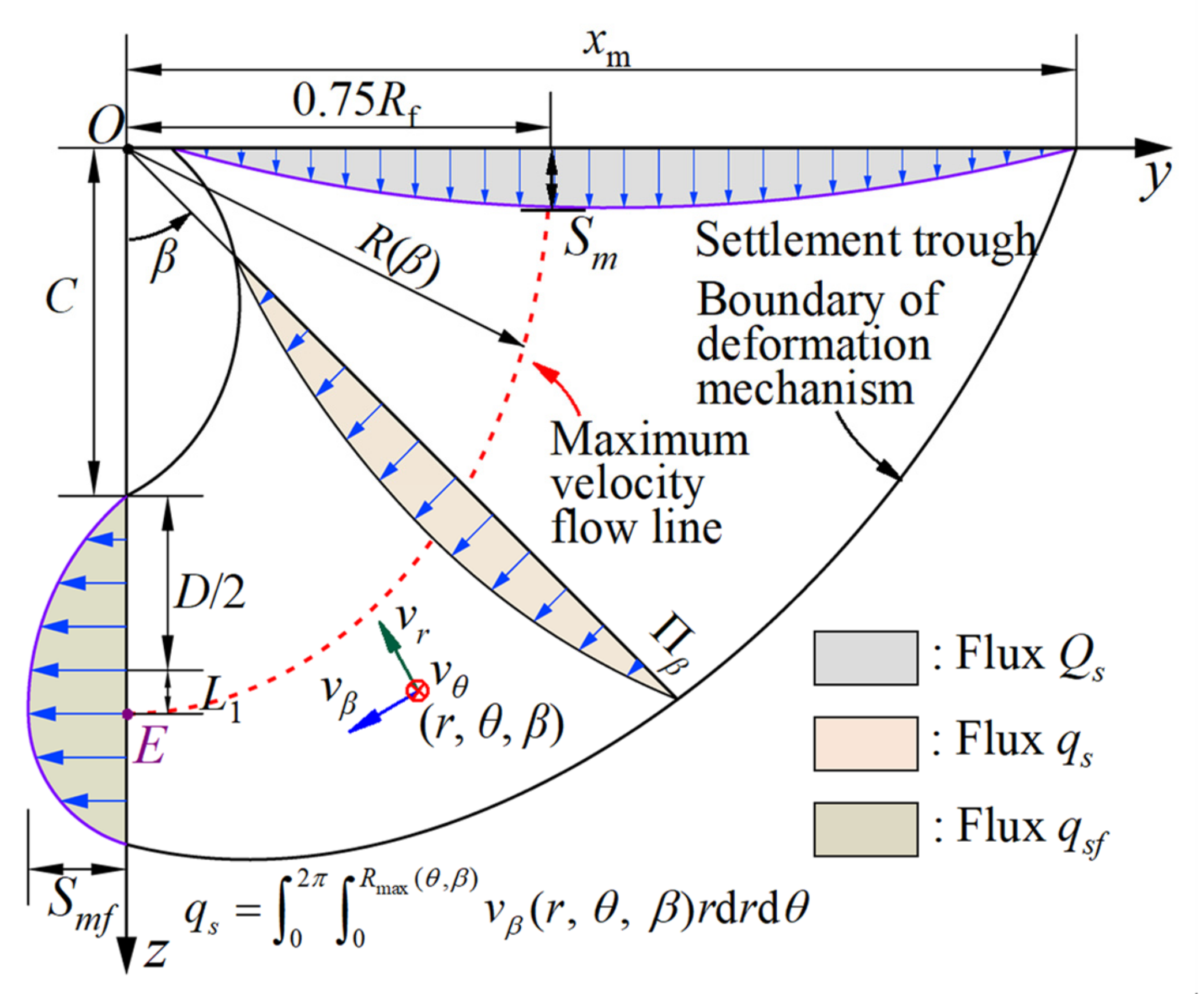
4. Deformation Mechanism
4.1. Deformaiton Mechanism
4.2. Calculation of Potential Energy
- (a)
- Strain energy
- (b)
- Potential energy of external force
4.3. Volume Loss Calculation
5. Verification with Numerical Simulation
6. Parameter Analysis
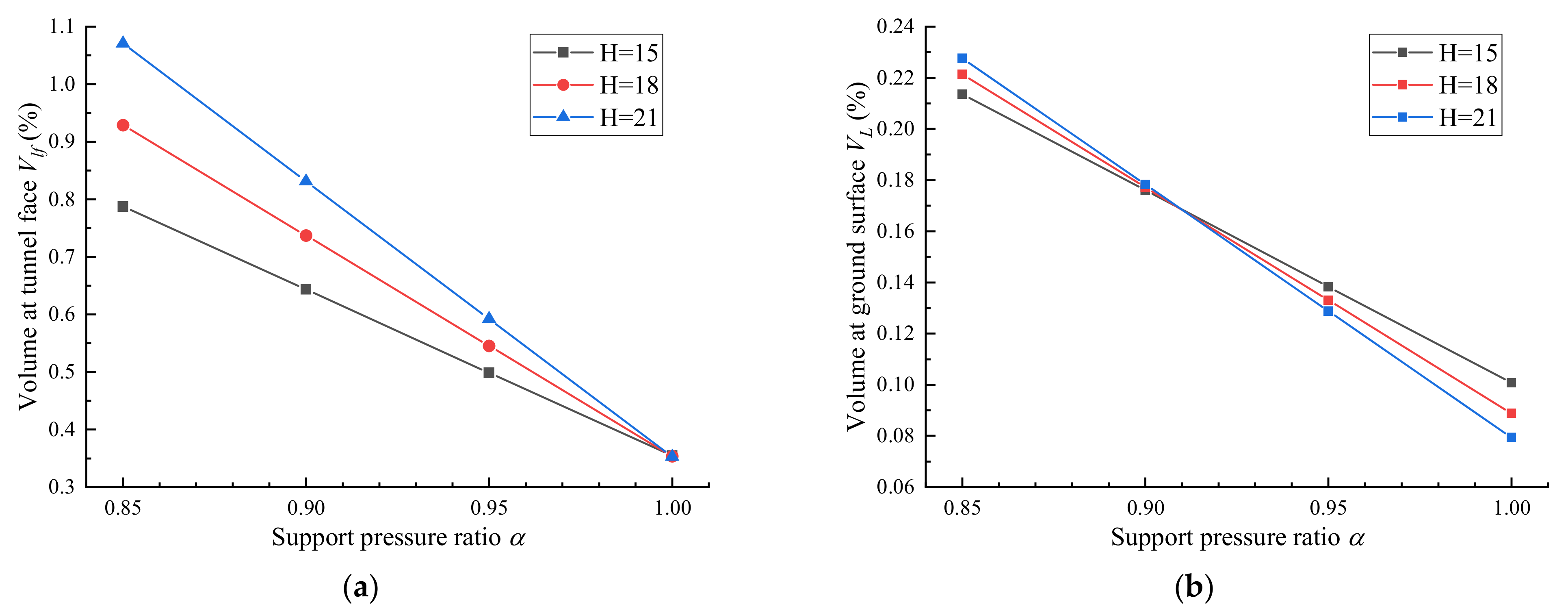
6.1. Influence of Support Pressure Ratio
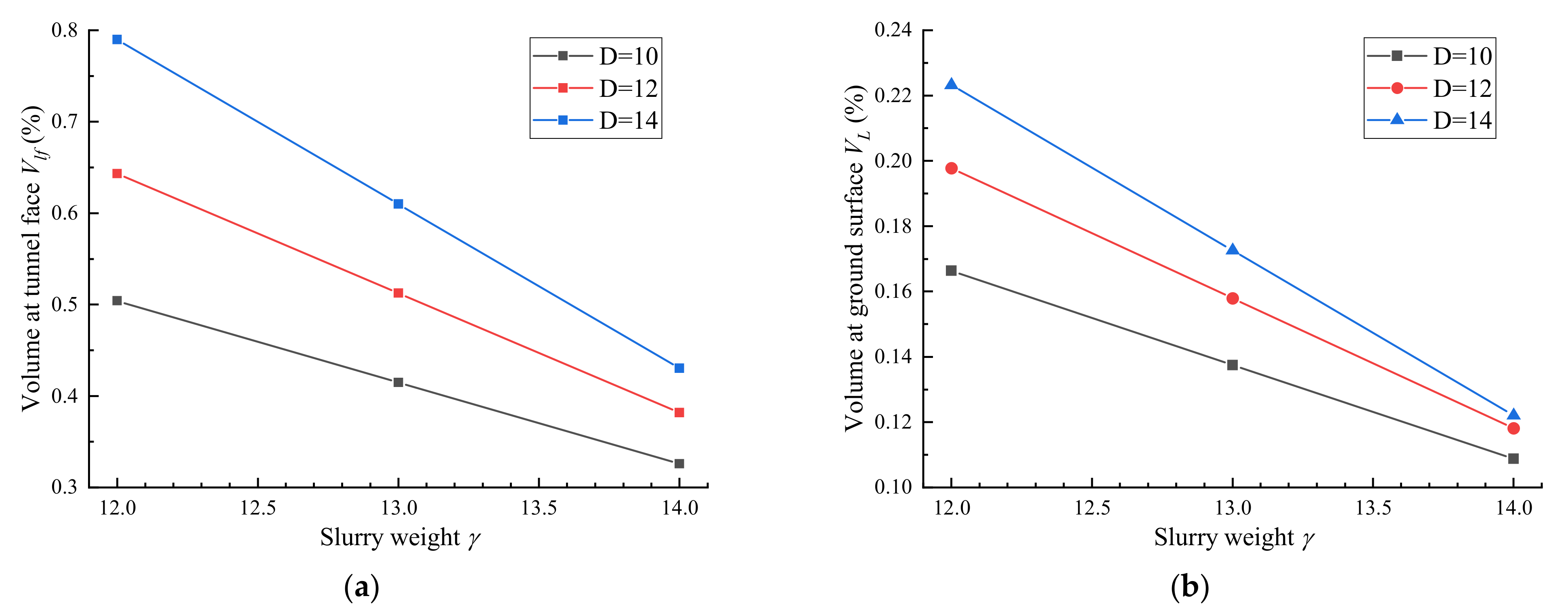
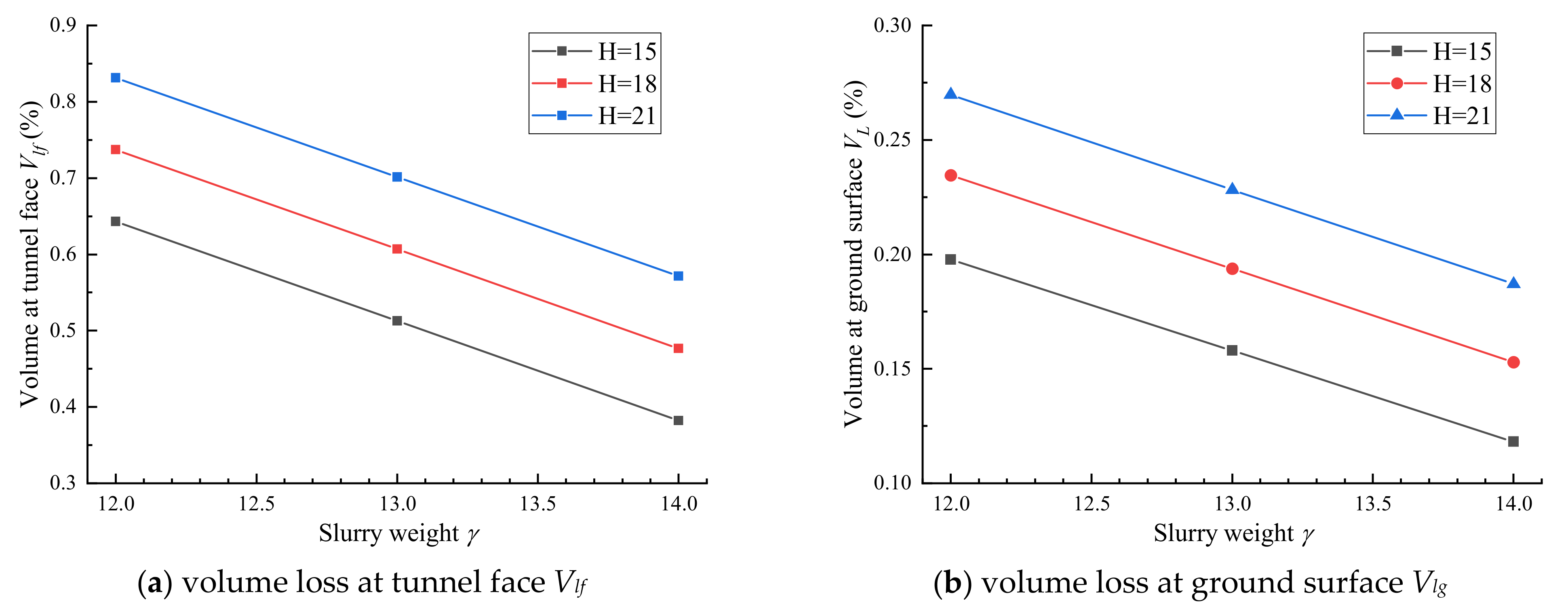
6.2. Influence of Slurry Weight
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Notations
| P | support pressure supplied by slurry |
| Pu | support pressure at the tunnel crown |
| σ | earth lateral pressure |
| σu | earth lateral pressure at the tunnel crown |
| H | depth of centreline of tunnel |
| D | tunnel diameter |
| C | cover of tunnel |
| VLf | volume loss at the tunnel face |
| α | volume loss at the tunnel face |
| γ | slurry weight |
| E | elastic modulus of soil |
| μ | Poisson’s ratio |
| Parameter of deformation mechanism | |
| L1 | distance between the centre of the tunnel face and the point with maximum displacement on tunnel face |
| k | parameter describing extent of volume change of soil |
| Smf | maximum displacement on the tunnel face |
| Rf | semi-major axis of maximum displacement line |
| Rβ | radius of maximum displacement line |
| Rmax | radius of circular cross-section |
| vr | radial displacement on circular cross-section |
| vβ | orthoradial displacement on circular cross-section |
| vm | maximum displacement on circular cross-section |
| qs | flux through circular cross-section |
| Smg | maximum settlement on the ground surface |
References
- Sagaseta, C. Analysis of undrained soil deformation due to ground loss. Geotechnique 1988, 38, 647–649. [Google Scholar] [CrossRef]
- Verruijt, A. A Complex Variable Solution for a Deforming Circular Tunnel in an Elastic Half-Plane. Int. J. Numer. Anal. Methods Geomech. 1997, 21, 77–89. [Google Scholar] [CrossRef]
- Loganathan, N.; Poulos, H.G. Analytical prediction for tunneling-induced ground movements in clays. J. Geotech. Geoenviron. Eng. 1998, 124, 846–856. [Google Scholar] [CrossRef]
- Bobet, A. Analytical Solutions for Shallow Tunnels in Saturated Ground. J. Eng. Mech. 2001, 127, 1258–1266. [Google Scholar] [CrossRef]
- Park, K.H. Analytical solution for tunnelling-induced ground movement in clays. Tunn. Undergr. Space Technol. 2005, 20, 249–261. [Google Scholar] [CrossRef]
- Li, S.; Li, P.; Zhang, M. Analysis of additional stress for a curved shield tunnel. Tunn. Undergr. Space Technol. 2021, 107, 103675. [Google Scholar] [CrossRef]
- Fang, Q.; Wang, G.; Yu, F.C.; Du, J.M. Analytical algorithm for longitudinal deformation profile of a deep tunnel. J. Rock Mech. Geotech. Eng. 2021, 13, 845–854. [Google Scholar] [CrossRef]
- Li, P.F.; Wei, Y.J.; Zhang, M.J.; Huang, Q.F.; Wang, F. Influence of non-associated flow rule on passive face instability for shallow shield tunnels. Tunn. Undergr. Space Technol. 2022, 119, 104202. [Google Scholar] [CrossRef]
- Fang, Q.; Zhang, D.; Wong, L.N.Y. Shallow tunnelling method (STM) for subway station construction in soft ground. Tunn. Undergr. Space Technol. 2012, 29, 10–30. [Google Scholar] [CrossRef]
- Vu, M.N.; Broere, W.; Bosch, J. Volume loss in shallow tunnelling. Tunn. Undergr. Space Technol. 2016, 59, 77–90. [Google Scholar] [CrossRef] [Green Version]
- Fang, Q.; Du, J.M.; Li, J.Y.; Zhang, D.L.; Cao, L.Q. Settlement characteristics of large-diameter shield excavation below existing subway in close vicinity. J. Cent. South Univ. 2021, 28, 882–897. [Google Scholar] [CrossRef]
- Gui, M.W.; Chen, S.L. Estimation of transverse ground surface settlement induced by DOT shield tunneling. Tunn. Undergr. Space Technol. 2013, 33, 119–130. [Google Scholar] [CrossRef]
- Shahin, H.M.; Nakai, T.; Ishii, K.; Iwata, T.; Kuroi, S. Investigation of influence of tunneling on existing building and tunnel: Model tests and numerical simulations. Acta Geotech. 2016, 11, 679–692. [Google Scholar] [CrossRef]
- Zheng, H.; Li, P.; Ma, G. Stability analysis of the middle soil pillar for asymmetric parallel tunnels by using model testing and numerical simulations. Tunn. Undergr. Space Technol. 2020, 108, 103686. [Google Scholar] [CrossRef]
- Bezuijen, A.; Talmon, A.M. Processes around a TBM. In Geotechnical Aspects of Underground Construction in Soft Ground—Proceedings of the 6th International Symposium, IS-SHANGHAI 2008; CRC Press: Boca Raton, FL, USA, 2009; pp. 3–13. [Google Scholar]
- Verruijt, A.; Booker, J.R. Surface settlements due to deformation of a tunnel in an elastic half plane. Geotechnique 1996, 46, 753–756. [Google Scholar] [CrossRef]
- González, C.; Sagaseta, C. Patterns of soil deformations around tunnels. Application to the extension of Madrid Metro. Comput. Geotech. 2001, 28, 445–468. [Google Scholar] [CrossRef]
- Lee, K.M.; Rowe, R.K.; Lo, K.Y. Subsidence owing to tunnelling. I. Estimating the gap parameter. Can. Geotech. J. 1992, 29, 929–940. [Google Scholar] [CrossRef]
- Rowe, R.K.; Lee, K.M. Subsidence owing to tunnelling. II. Evaluation of a prediction technique. Can. Geotech. J. 1992, 29, 941–954. [Google Scholar] [CrossRef]
- Cao, L.; Zhang, D.; Fang, Q. Semi-analytical prediction for tunnelling-induced ground movements in multi-layered clayey soils. Tunn. Undergr. Space Technol. 2020, 102, 103446. [Google Scholar] [CrossRef]
- Mair, R.J.; Gunn, M.J.; O’Reilly, M.P. Ground movement around shallow tunnels in soft clay. Tunn. Tunn. Int. 1982, 14, 45–48. [Google Scholar]
- Attewell, P.B.; Yeates, J.; Selby, A.R. Soil Movements Induced by Tunnelling and their Effects on Pipelines and Structures; Methuen, Inc.: New York, NY, USA, 1986. [Google Scholar]
- Macklin, S.R. The prediction of volume loss due to tunnelling in over consolidated clay based on heading geometry and stability number. Ground Eng. 1999, 32, 30–33. [Google Scholar]
- Dimmock, P.S.; Mair, R.J. Estimating volume loss for open-face tunnels in London Clay. Proc. Inst. Civ. Eng. Geotech. Eng. 2007, 160, 13–22. [Google Scholar] [CrossRef]
- Osman, A.S. Predicting 2D ground movements around tunnels in undrained clay. Geotechnique 2006, 56, 597–604. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Fang, Q.; Zhang, D.; Liu, Y. Energy-based prediction of volume loss ratio and plastic zone dimension of shallow tunnelling. Comput. Geotech. 2020, 118, 103343. [Google Scholar] [CrossRef]
- Palmer, A.C.; Mair, R.J. Ground movements above tunnels: A method for calculating volume loss. Can. Geotech. J. 2011, 48, 451–457. [Google Scholar] [CrossRef]
- Klar, A.; Klein, B. Energy-based volume loss prediction for tunnel face advancement in clays. Geotechnique 2014, 64, 776–786. [Google Scholar] [CrossRef]
- Mollon, G.; Dias, D.; Soubra, A.-H. Continuous velocity fields for collapse and blowout of a pressurized tunnel face in purely cohesive soil. Int. J. Numer. Anal. Methods Geomech. 2012, 30, 1303–1336. [Google Scholar] [CrossRef] [Green Version]
- Attewell, P.B.; Farmer, I.W. Ground disturbance caused by shield tunnel over consolidated clay. Eng. Geol. 1974, 8, 361–381. [Google Scholar] [CrossRef]
- Deane, A.P.; Bassett, R.H. The Heathrow Express trial tunnel. Proc. Inst. Civ. Eng. Geotech. Eng. 1995, 113, 144–156. [Google Scholar] [CrossRef]
- Li, P.F.; Chen, K.; Wang, F.; Li, Z. An upper-bound analytical model of blow-out for a shallow tunnel in sand considering the partial failure within the face. Tunn. Undergr. Space Technol. 2019, 91, 102989. [Google Scholar] [CrossRef]
- Yu, L.; Zhang, D.; Fang, Q.; Cao, L.; Zhang, Y.; Xu, T. Face stability of shallow tunnelling in sandy soil considering unsupported length. Tunn. Undergr. Space Technol. 2020, 102, 103445. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Buoyant unit weight of soil (kN/m3) | 18 |
| Unit weight of water (kN/m3) | 10 |
| Elastic modulus (MPa) | 1 |
| Poisson’s ratio | 0.3 |
| Support pressure ratio | 0.85, 0.9, 0.95, 1.00 |
| Slurry weight (kN/m3) | 12, 13, 14 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, G.; Fang, Q.; Du, J.; Yang, X.; Wang, J. Estimating Volume Loss for Shield-Driven Tunnels Based on the Principle of Minimum Total Potential Energy. Appl. Sci. 2022, 12, 1794. https://doi.org/10.3390/app12041794
Wang G, Fang Q, Du J, Yang X, Wang J. Estimating Volume Loss for Shield-Driven Tunnels Based on the Principle of Minimum Total Potential Energy. Applied Sciences. 2022; 12(4):1794. https://doi.org/10.3390/app12041794
Chicago/Turabian StyleWang, Gan, Qian Fang, Jianming Du, Xiaoxu Yang, and Jun Wang. 2022. "Estimating Volume Loss for Shield-Driven Tunnels Based on the Principle of Minimum Total Potential Energy" Applied Sciences 12, no. 4: 1794. https://doi.org/10.3390/app12041794
APA StyleWang, G., Fang, Q., Du, J., Yang, X., & Wang, J. (2022). Estimating Volume Loss for Shield-Driven Tunnels Based on the Principle of Minimum Total Potential Energy. Applied Sciences, 12(4), 1794. https://doi.org/10.3390/app12041794