
Single and Multiple Continuous-Wave Interference Suppression Using Adaptive IIR Notch Filters Based on Direct-Form Structure in a QPSK Communication System

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Works
3. Signal Model
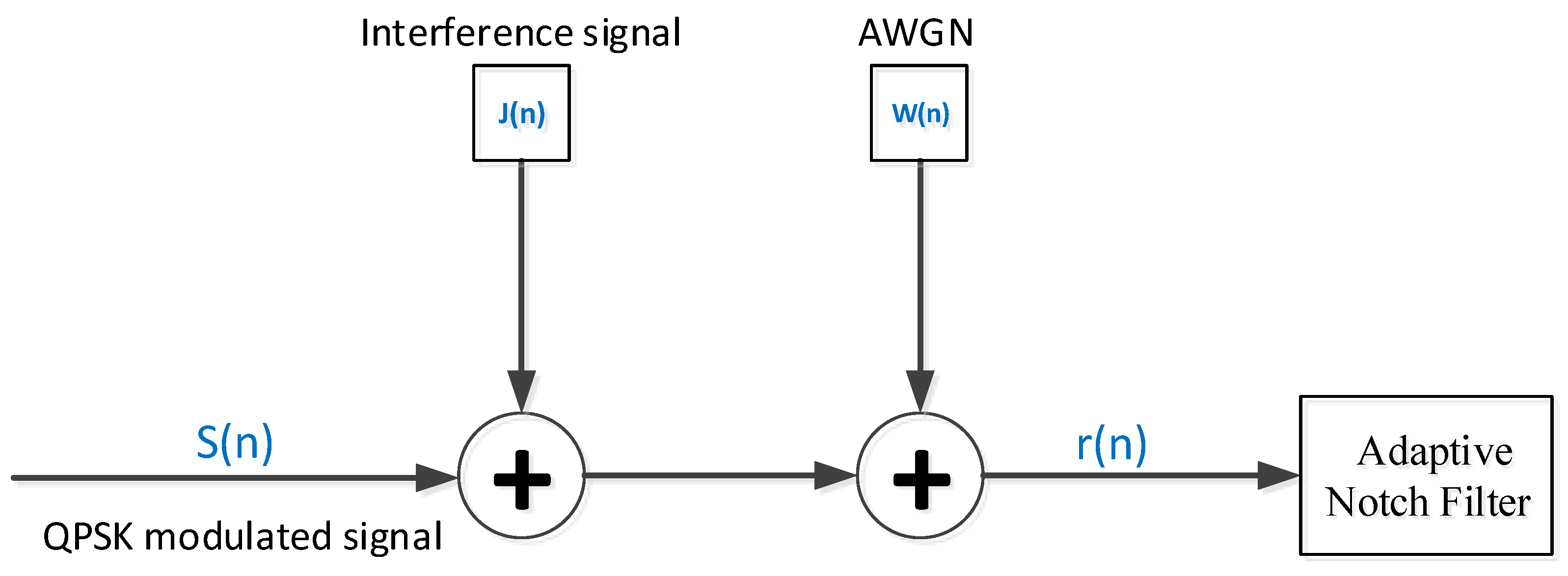
Received Signal Model for The QPSK System
- is the unknown amplitude of the interference signal;
- is the unknown frequency of the interference signal and ;
- is the phase delay of the interference signal, which is considered to be a random variable uniformly distributed in the range [;
- is the number of CW interferences, and n is the time index.
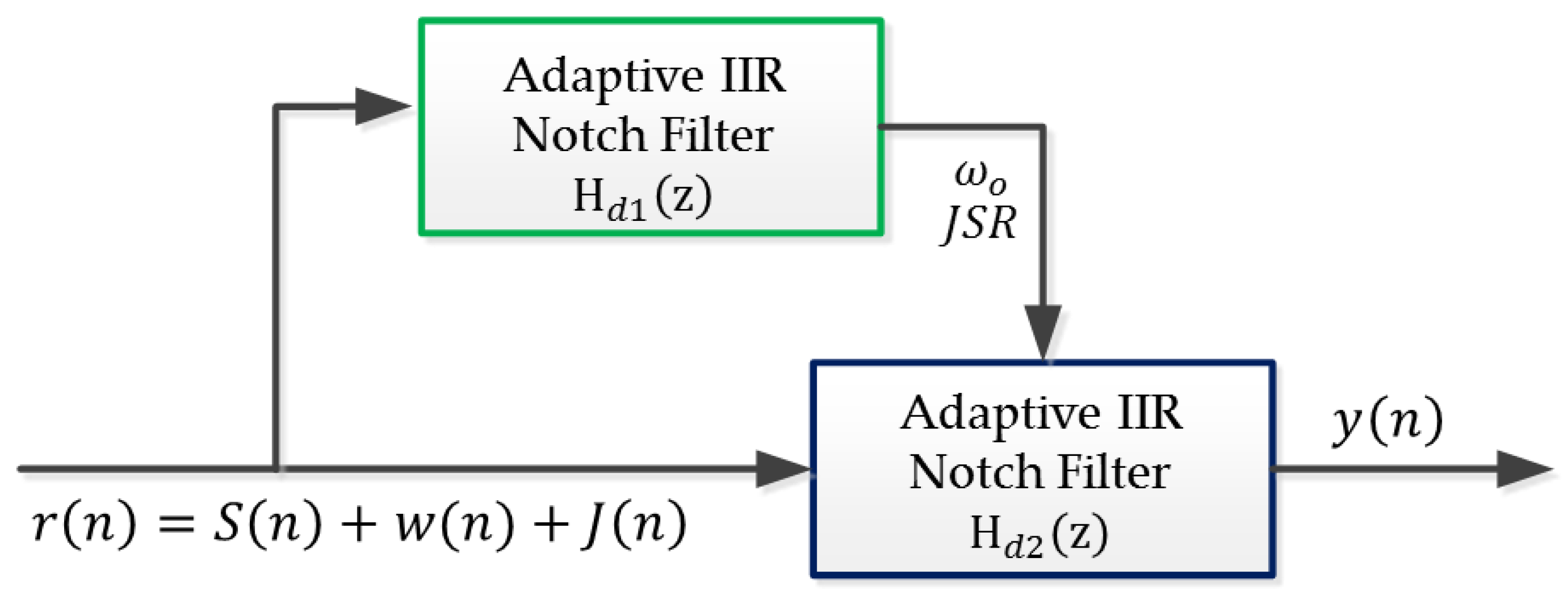
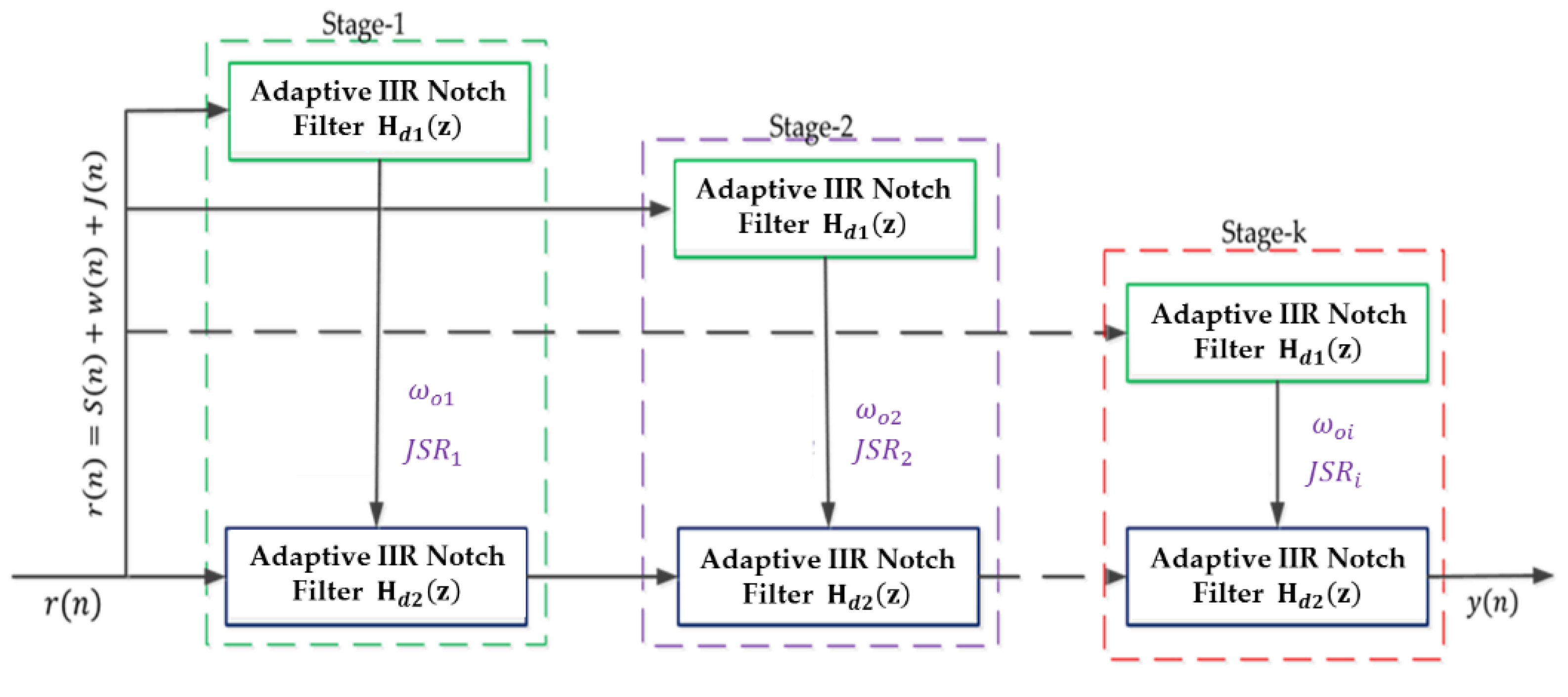
4. Proposed Suppression System Model
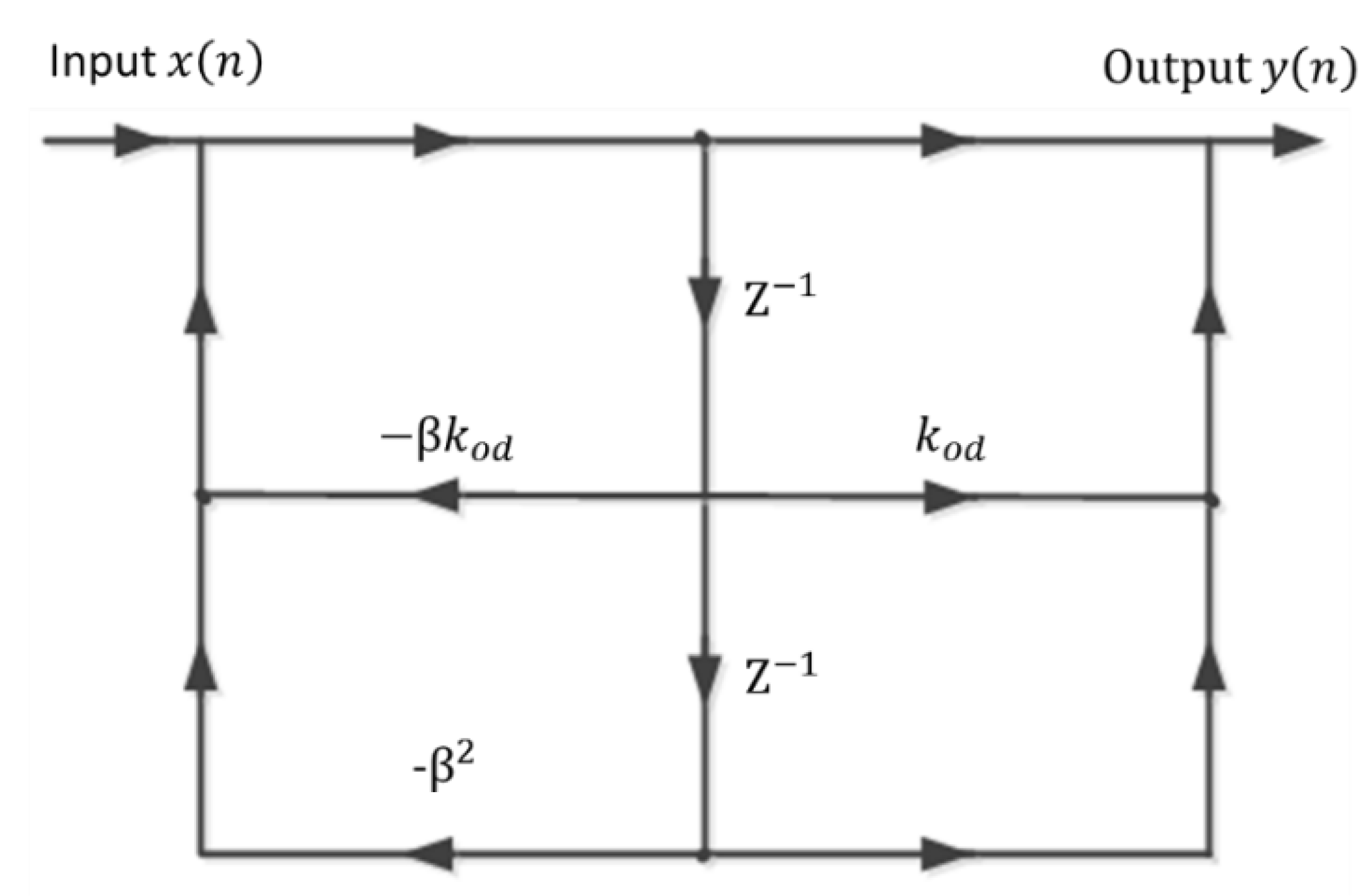
4.1. Overview of Adaptive Digital Filters Structures
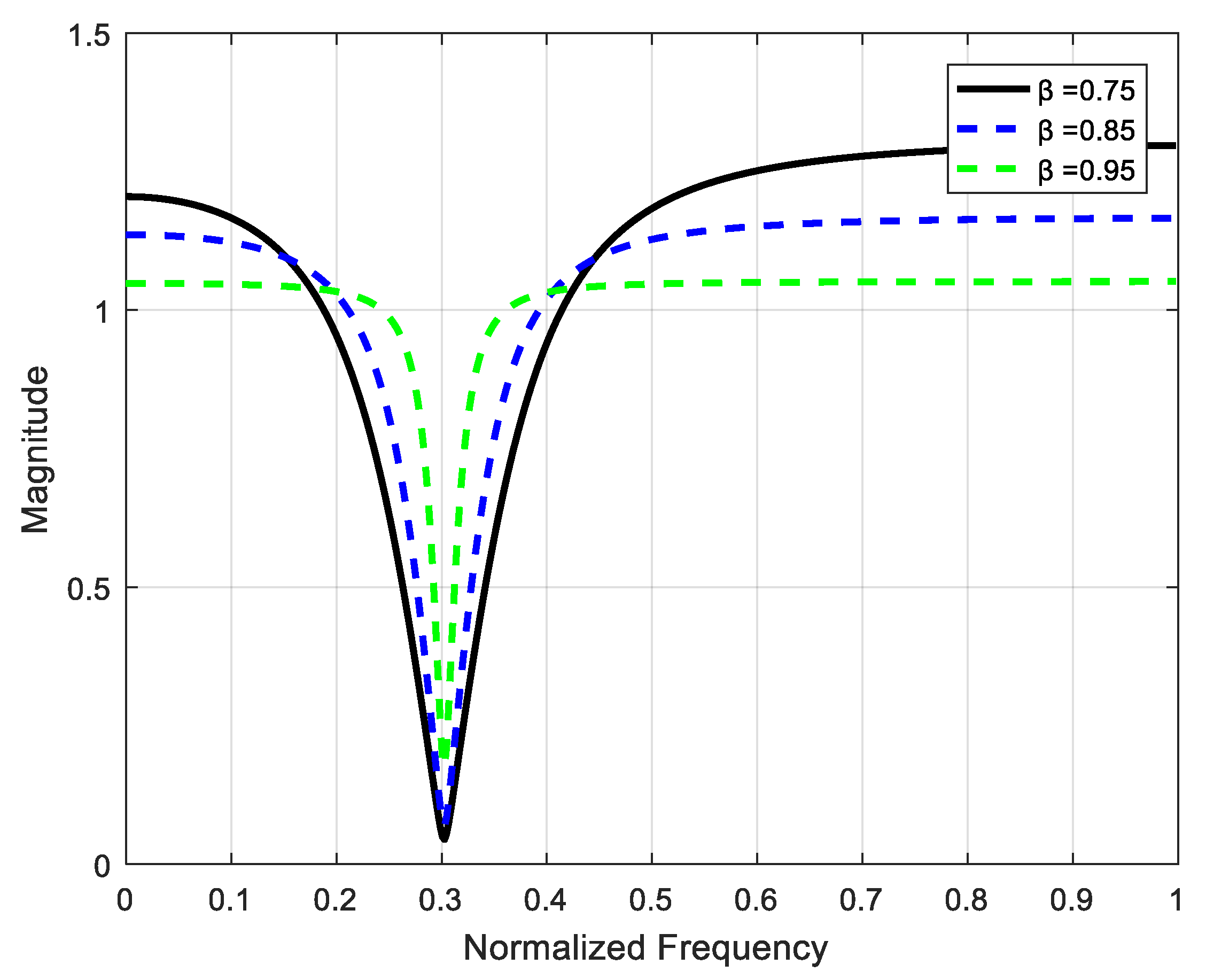
4.2. Adaptive IIR NF
4.2.1. Adaptation of Parameter
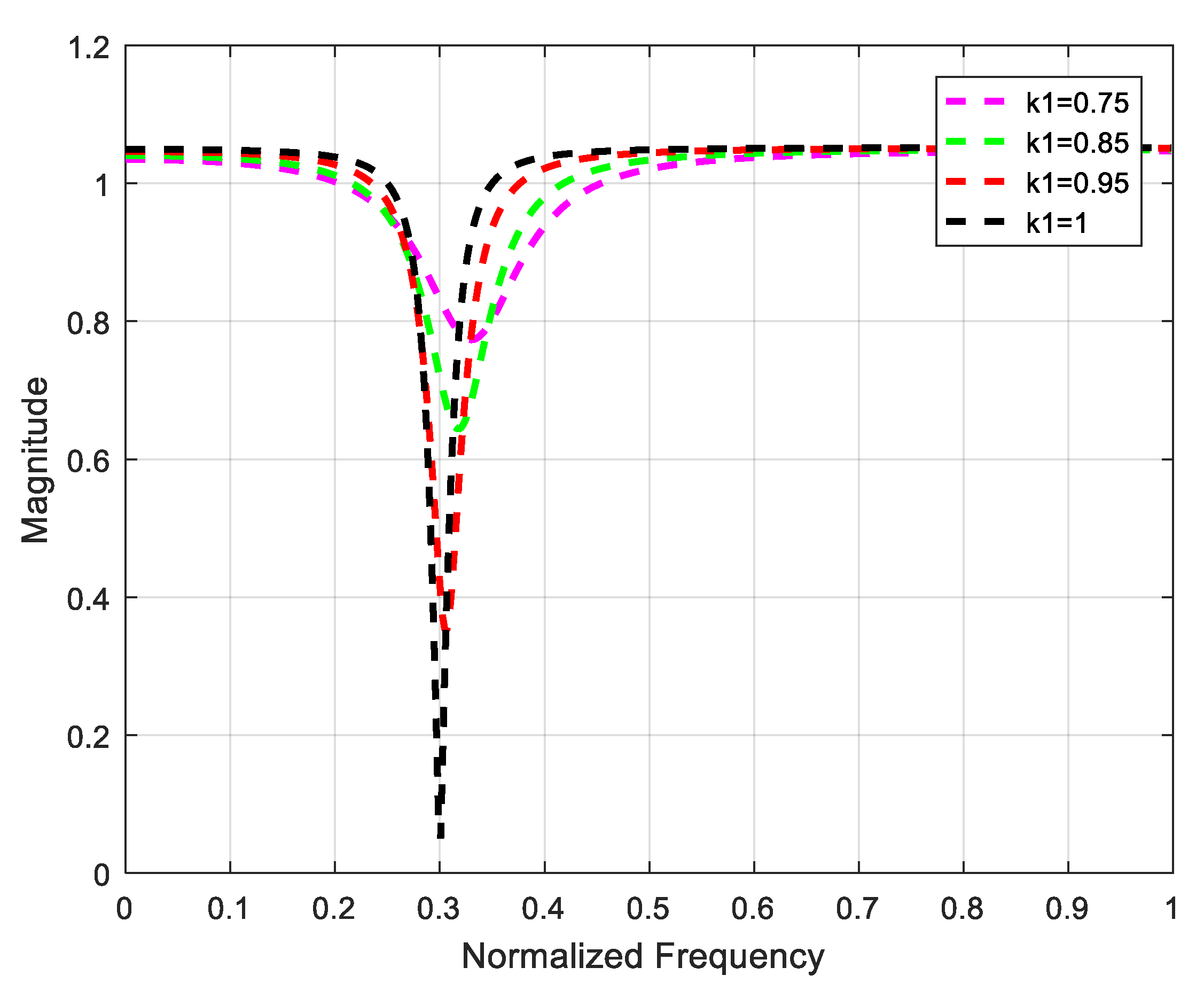
4.2.2. Optimal Notch Depth, Maximizing the Output SNR
5. Simulation Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wyatt, K.; Gruber, M. Radio Frequency Interference (RFI) Pocket Guide; Scitech Publishing: Raleigh, NC, USA, 2015. [Google Scholar] [CrossRef]
- Elbert, B. Radio Frequency Interference in Communications Systems; Artech House: London, UK, 2016. [Google Scholar]
- Mpitziopoulos, A.; Gavalas, D.; Konstantopoulos, C.; Pantziou, G. A survey on jamming attacks and countermeasures in WSNs. IEEE Commun. Surv. Tutor. 2009, 11, 42–56. [Google Scholar] [CrossRef]
- Grover, K.; Lim, A.; Yang, Q. Jamming and anti-jamming techniques in wireless networks: A survey. Int. J. Ad Hoc Ubiquitous Comput. 2014, 17, 197–215. [Google Scholar] [CrossRef] [Green Version]
- Shahriar, C.; La Pan, M.; Lichtman, M.; Clancy, T.C.; McGwier, R.; Tandon, R.; Sodagari, S.; Reed, J.H. PHY-layer resiliency in OFDM communications: A tutorial. IEEE Commun. Surv. Tutor. 2014, 17, 292–314. [Google Scholar] [CrossRef]
- Wei, X.; Wang, Q.; Wang, T.; Fan, J. Jammer localization in multi-hop wireless network: A comprehensive survey. IEEE Commun. Surv. Tutor. 2016, 19, 765–799. [Google Scholar] [CrossRef]
- Lichtman, M.; Jover, R.P.; Labib, M.; Rao, R.; Marojevic, V.; Reed, J.H. LTE/LTE-A jamming, spoofing, and sniffing: Threat assessment and mitigation. IEEE Commun. Mag. 2016, 54, 54–61. [Google Scholar] [CrossRef]
- Borio, D.; Dovis, F.; Kuusniemi, H.; Presti, L.L. Impact and detection of GNSS jammers on consumer grade satellite navigation receivers. Proc. IEEE 2016, 104, 1233–1245. [Google Scholar] [CrossRef]
- Qin, W.; Gamba, M.T.; Falletti, E.; Dovis, F. An assessment of impact of adaptive notch filters for interference removal on the signal processing stages of a GNSS receiver. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 4067–4082. [Google Scholar] [CrossRef]
- Getu, T.M.; Ajib, W.; Landry, R. INR walls: Performance limits in RFI detection. In Proceedings of the 2019 IEEE 30th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Istanbul, Turkey, 8–11 September 2019; pp. 1–6. [Google Scholar]
- Same, M.; Gleeton, G.; Gandubert, G.; Ivanov, P.; Landry, R. Multiple narrowband interferences characterization, detection and mitigation using simplified welch algorithm and notch filtering. Appl. Sci. 2021, 11, 1331. [Google Scholar] [CrossRef]
- ETSI EN 302 307-1 V1. 4.1; Second Generation Framing Structure, Channel Coding and Modulation Systems for Broadcasting, Interactive Services, News Gathering and Other Broadband Satellite Applications. Digital Video Broadcasting: Geneva, Switzerland, 2014.
- Cho, N.I.; Choi, C.H.; Lee, S.U. Adaptive line enhancement by using an IIR lattice notch filter. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 585–589. [Google Scholar]
- Borio, D.; Camoriano, L.; Savasta, S.; Presti, L.L. Time-frequency excision for GNSS applications. IEEE Syst. J. 2008, 2, 27–37. [Google Scholar] [CrossRef]
- Choi, J.W.; Cho, N.I. Narrow-band interference suppression in direct sequence spread spectrum systems using a lattice IIR notch filter. In Proceedings of the 2001 IEEE International Conference on Acoustics, Speech and Signal Processing, Salt Lake City, UT, USA, 7–11 May 2001; Volume 4, pp. 2237–2240. [Google Scholar] [CrossRef]
- Stearns, S.D. Fundamentals of Adaptive Signal Processing. Available online: https://course.ece.cmu.edu/~ece792/handouts/LO_Chap_AdaptiveFilters.pdf (accessed on 18 January 2022).
- Ferdjallah, M.; Barr, R. Adaptive digital notch filter design on the unit circle for the removal of powerline noise from biomedical signals. IEEE Trans. Biomed. Eng. 1994, 41, 529–536. [Google Scholar] [CrossRef]
- Borio, D.; Camoriano, L.; Presti, L.L. Two-pole and multi-pole notch filters: A computationally effective solution for GNSS interference detection and mitigation. IEEE Syst. J. 2008, 2, 38–47. [Google Scholar] [CrossRef]
- Kuo, S.; Chen, J. New adaptive IIR notch filter and its application to howling control in speakerphone system. Electron. Lett. 1992, 28, 764–766. [Google Scholar] [CrossRef]
- Lu, D.; Wu, R.; Liu, H. Global positioning system anti-jamming algorithm based on period repetitive CLEAN. IET Radar Sonar Navig. 2013, 7, 164–169. [Google Scholar] [CrossRef]
- Lin, T.; Abdizadeh, M.; Broumandan, A.; Wang, D.; O’Keefe, K.; Lachapelle, G. Interference suppression for high precision navigation using vector-based GNSS software receivers. In Proceedings of the 24th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2011), Portland, OR, USA, 20–23 September 2011; pp. 372–383. [Google Scholar]
- Glennon, E.P.; Dempster, A.G. Delayed PIC for postcorrelation mitigation of continuous wave and multiple access interference in GPS receivers. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2544–2557. [Google Scholar] [CrossRef]
- Barbarossa, S.; Scaglione, A. Adaptive time-varying cancellation of wideband interferences in spread-spectrum communications based on time-frequency distributions. IEEE Trans. Signal Process. 1999, 47, 957–965. [Google Scholar] [CrossRef] [Green Version]
- Ma, W.-J.; Mao, W.-L.; Chang, F.-R. Design of adaptive all-pass based notch filter for narrowband anti-jamming GPS system. In Proceedings of the 2005 IEEE International Symposium on Intelligent Signal Processing and Communication Systems, Hong Kong, China, 13–16 December 2005; pp. 305–308. [Google Scholar]
- Zhang, Y.D.; Amin, M.G. Anti-jamming GPS receiver with reduced phase distortions. IEEE Signal Process. Lett. 2012, 19, 635–638. [Google Scholar] [CrossRef]
- Higgins, T.S.; Webster, T.; Shackelford, A.K. Mitigating interference via spatial and spectral nulls. In Proceedings of the IET International Conference on Radar Systems, Glasgow, UK, 22–25 October 2012. [Google Scholar] [CrossRef]
- Azarbad, M.R.; Mosavi, M.R. A new method to mitigate multipath error in single-frequency GPS receiver with wavelet transform. GPS Solut. 2014, 18, 189–198. [Google Scholar] [CrossRef]
- Zhang, Y.; Amin, M.G.; Lindsey, A.R. Anti-jamming GPS receivers based on bilinear signal distributions. In 2001 MILCOM Communications for Network-Centric Operations: Creating the Information Force (Cat. No. 01CH37277), Proceedings of the MILCOM, Military Communications Conference, McLean, VA, USA, 28–31 October 2001; IEEE: New York, NY, USA, 2001; Volume 2, pp. 1070–1074. [Google Scholar]
- Jiang, F.-W.; Xiao, Z.; Yi, K.-C.; Sun, Y.-J. Adaptive two-stage filter bank based narrowband interference suppression in DSSS systems. In Proceedings of the 9th IEEE International Conference on Signal Processing, Beijing, China, 26–29 October 2008; pp. 88–91. [Google Scholar] [CrossRef]
- Ouyang, X.; Amin, M. Short-time Fourier transform receiver for nonstationary interference excision in direct sequence spread spectrum communications. IEEE Trans. Signal Process. 2001, 49, 851–863. [Google Scholar] [CrossRef]
- Landry, R.J.R.; Mouyon, P.; Lekaïm, D. Interference mitigation in spread spectrum systems by wavelet coefficients thresholding. Eur. Trans. Telecommun. 1998, 9, 191–202. [Google Scholar] [CrossRef]
- Dovis, F.; Musumeci, L. Use of wavelet transforms for interference mitigation. In Proceedings of the 2011 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 29–30 June 2011; pp. 116–121. [Google Scholar]
- Solano, J.J.P.; Felici-Castell, S.; Rodriguez-Hernandez, M.A. Narrowband interference suppression in frequency-hopping spread spectrum using undecimated wavelet packet transform. IEEE Trans. Veh. Technol. 2008, 57, 1620–1629. [Google Scholar] [CrossRef]
- Mosavi, M.R.; Pashaian, M.; Rezaei, M.J.; Mohammadi, K. Jamming mitigation in global positioning system receivers using wavelet packet coefficients thresholding. IET Signal Process. 2015, 9, 457–464. [Google Scholar] [CrossRef]
- Lotz, T. Adaptive Analog-to-Digital Conversion and Pre-Correlation Interference Mitigation Techniques in a GNSS Receiver. Master’s Thesis, Technical University of Kaiserslautern, Kaiserslanutern, Germany, 2008. [Google Scholar]
- Balaei, A.T.; Dempster, A. A statistical inference technique for GPS interference detection. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 1499–1511. [Google Scholar] [CrossRef]
- Chien, Y.-R. Design of GPS anti-jamming systems using adaptive notch filters. IEEE Syst. J. 2013, 9, 451–460. [Google Scholar] [CrossRef]
- Wang, H.; Chang, Q.; Xu, Y.; Li, X. Adaptive narrow-band interference suppression and performance evaluation based on code-aided in GNSS inter-satellite links. IEEE Syst. J. 2019, 14, 538–547. [Google Scholar] [CrossRef]
- Choi, J.W.; Cho, N.I. Suppression of narrow-band interference in DS-spread spectrum systems using adaptive IIR notch filter. Signal Process. 2002, 82, 2003–2013. [Google Scholar] [CrossRef]
- Lv, Q.; Qin, H. General method to mitigate the continuous wave interference and narrowband interference for GNSS receivers. IET Radar Sonar Navig. 2020, 14, 1430–1435. [Google Scholar] [CrossRef]
- El Gebali, A.; Landry, R., Jr. Mitigation of continuous wave narrow-band interference in QPSK demodulation using adaptive IIR notch filter. Am. J. Signal Process. 2020, 10, 10–18. [Google Scholar]
- Mosavi, M.R.; Moghaddasi, M.S.; Rezaei, M.J. A new method for continuous wave interference mitigation in single-frequency GPS receivers. Wirel. Pers. Commun. 2016, 90, 1563–1578. [Google Scholar] [CrossRef]
- El Gebali, A.; Landry, R.J. Multi-frequency interference detection and mitigation using multiple adaptive IIR notch filter with lattice structure. J. Comput. Commun. 2021, 9, 58–77. [Google Scholar] [CrossRef]
- Mao, W.-L. Novel SREKF-based recurrent neural predictor for narrowband/FM interference rejection in GPS. AEU-Int. J. Electron. Commun. 2008, 62, 216–222. [Google Scholar] [CrossRef]
- Mao, W.-L.; Ma, W.-J.; Chien, Y.-R.; Ku, C.-H. New adaptive all-pass based notch filter for narrowband/FM anti-jamming GPS receivers. Circuits Syst. Signal Process. 2011, 30, 527–542. [Google Scholar] [CrossRef]
- Vijayan, R.; Poor, H. Nonlinear techniques for interference suppression in spread-spectrum systems. IEEE Trans. Commun. 1990, 38, 1060–1065. [Google Scholar] [CrossRef]
- Mosavi, M.R.; Shafiee, F. Narrowband interference suppression for GPS navigation using neural networks. GPS Solut. 2016, 20, 341–351. [Google Scholar] [CrossRef]
- Rao, K.D.; Swamy, M.; Plotkin, E. A nonlinear adaptive filter for narrowband interference mitigation in spread spectrum systems. Signal Process. 2005, 85, 625–635. [Google Scholar] [CrossRef]
- Landry, R.; Calmettes, V.; Bousquet, M. Impact of interference on a generic GPS receiver and assessment of mitigation techniques. In Proceedings of the IEEE 5th International Symposium on Spread Spectrum Techniques and Applications, Sun City, South Africa, 4 September 1998; Volume 1, pp. 87–91. [Google Scholar] [CrossRef]
- Wang, X.L.; Ge, Y.J.; Zhang, J.J.; Song, Q.J. Discussion on the -3dB rejection bandwidth of IIR notch filters. In Proceedings of the IEEE 6th International Conference on Signal Processing for Wireless Communications, Beijing, China, 26–30 August 2002. [Google Scholar]
- Shynk, J.J. Adaptive IIR filtering. IEEE ASSP Mag. 1989, 6, 4–21. [Google Scholar] [CrossRef]
- Regalia, P.A. Adaptive IIR Filtering in Signal Processing and Control; Routledge: Boca Raton, FL, USA, 2018. [Google Scholar] [CrossRef]
- Punchalard, R. On adaptive IIR lattice notch filter using a robust variable step-size for the detection of sinusoid. In Proceedings of the 8th IEEE International Conference on Communication Systems (ICCS), Singapore, 28 November 2002; pp. 800–804. [Google Scholar] [CrossRef]
- Cho, N.I.; Lee, S.U. On the adaptive lattice notch filter for the detection of sinusoids. IEEE Trans. Circuits and Syst II Analog Digital Signal Process. 1993, 40, 405–416. [Google Scholar] [CrossRef]























Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
El Gebali, A.; Landry, R.J. Single and Multiple Continuous-Wave Interference Suppression Using Adaptive IIR Notch Filters Based on Direct-Form Structure in a QPSK Communication System. Appl. Sci. 2022, 12, 2186. https://doi.org/10.3390/app12042186
El Gebali A, Landry RJ. Single and Multiple Continuous-Wave Interference Suppression Using Adaptive IIR Notch Filters Based on Direct-Form Structure in a QPSK Communication System. Applied Sciences. 2022; 12(4):2186. https://doi.org/10.3390/app12042186
Chicago/Turabian StyleEl Gebali, Abdelrahman, and René Jr Landry. 2022. "Single and Multiple Continuous-Wave Interference Suppression Using Adaptive IIR Notch Filters Based on Direct-Form Structure in a QPSK Communication System" Applied Sciences 12, no. 4: 2186. https://doi.org/10.3390/app12042186
APA StyleEl Gebali, A., & Landry, R. J. (2022). Single and Multiple Continuous-Wave Interference Suppression Using Adaptive IIR Notch Filters Based on Direct-Form Structure in a QPSK Communication System. Applied Sciences, 12(4), 2186. https://doi.org/10.3390/app12042186