
Flux-Barrier Design and Torque Performance Analysis of Synchronous Reluctance Motor with Low Torque Ripple

Abstract
:1. Introduction
2. Rotor Structure for Initial Motor and Proposed Motor
2.1. Rotor Structure of the Initial Motor
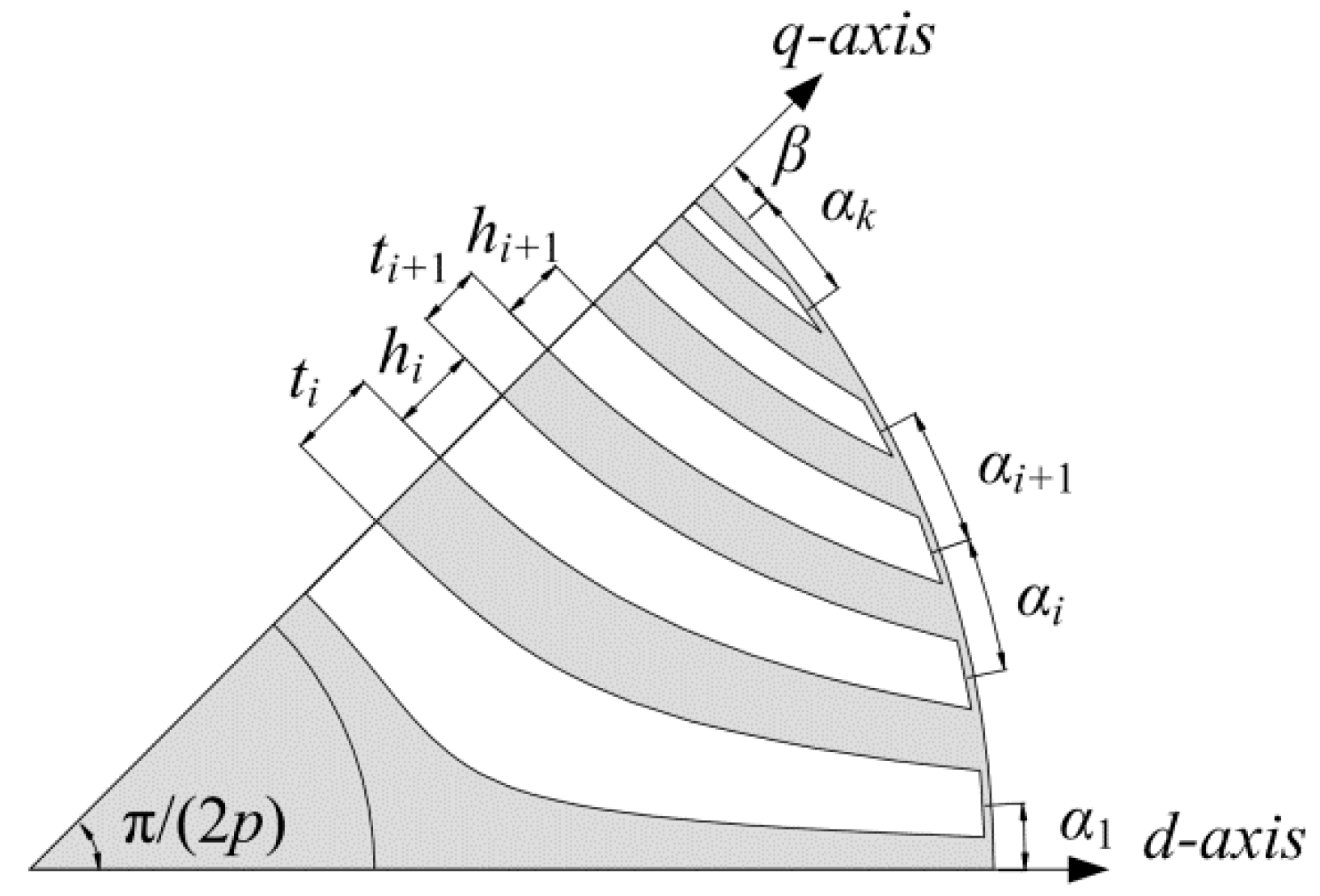
2.2. Rotor Structure of the Proposed Motor
3. Computation of MEC of Proposed Motor
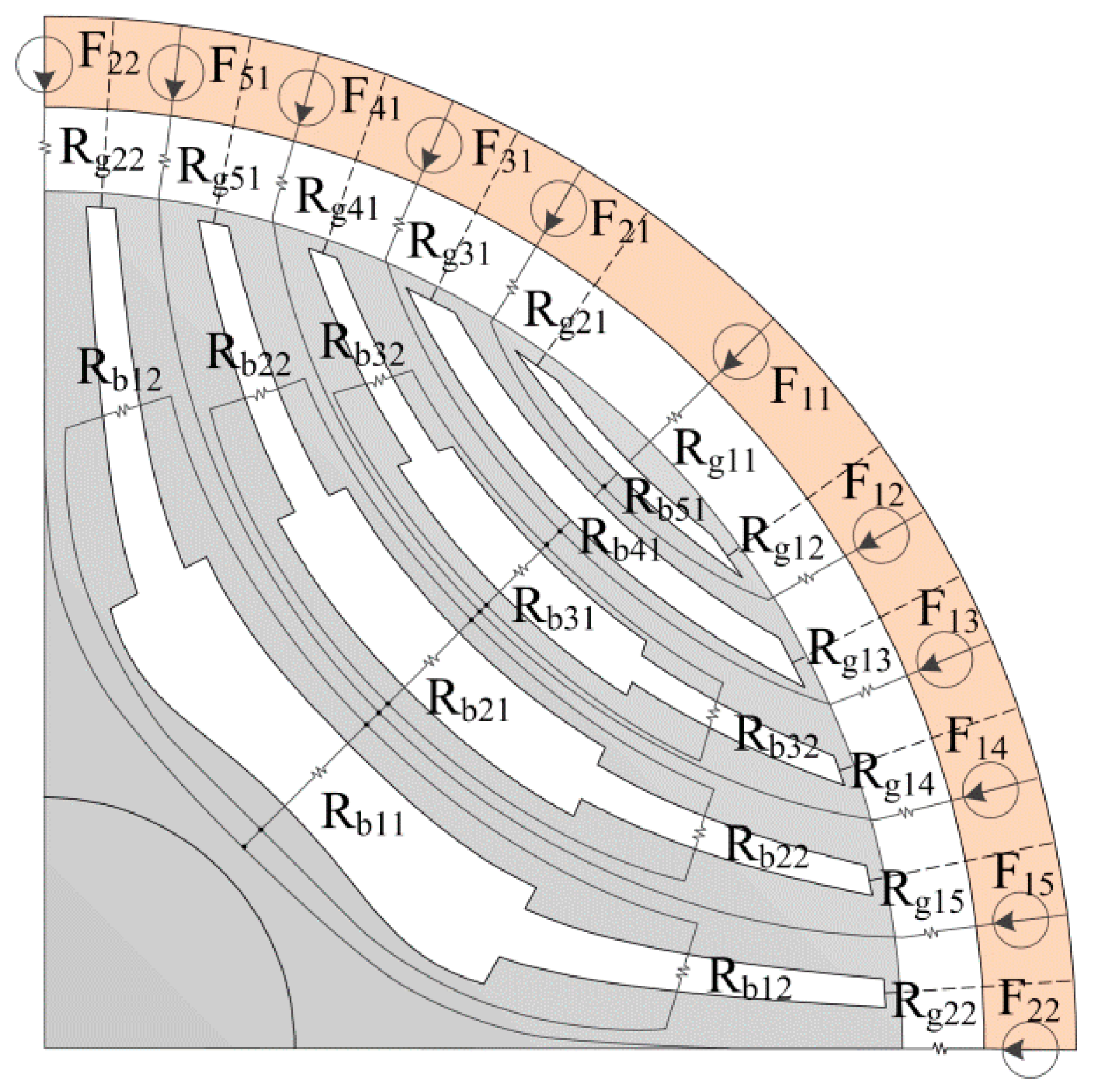
3.1. MMF Sources
3.2. Air-Gap Reluctances in the MEC
3.3. Cross-Shaped Flux-Barriers Reluctances
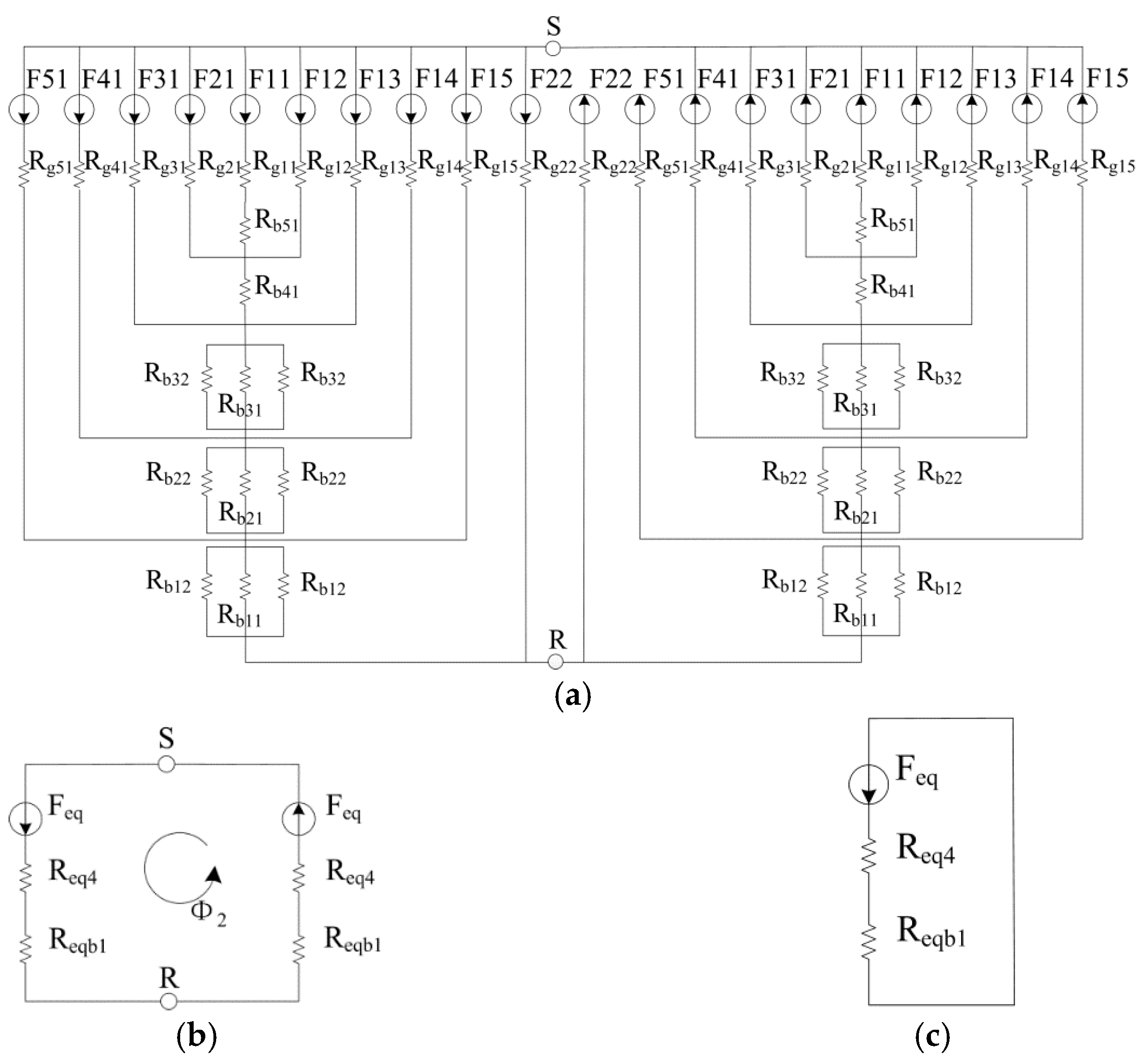
3.4. MEC Model
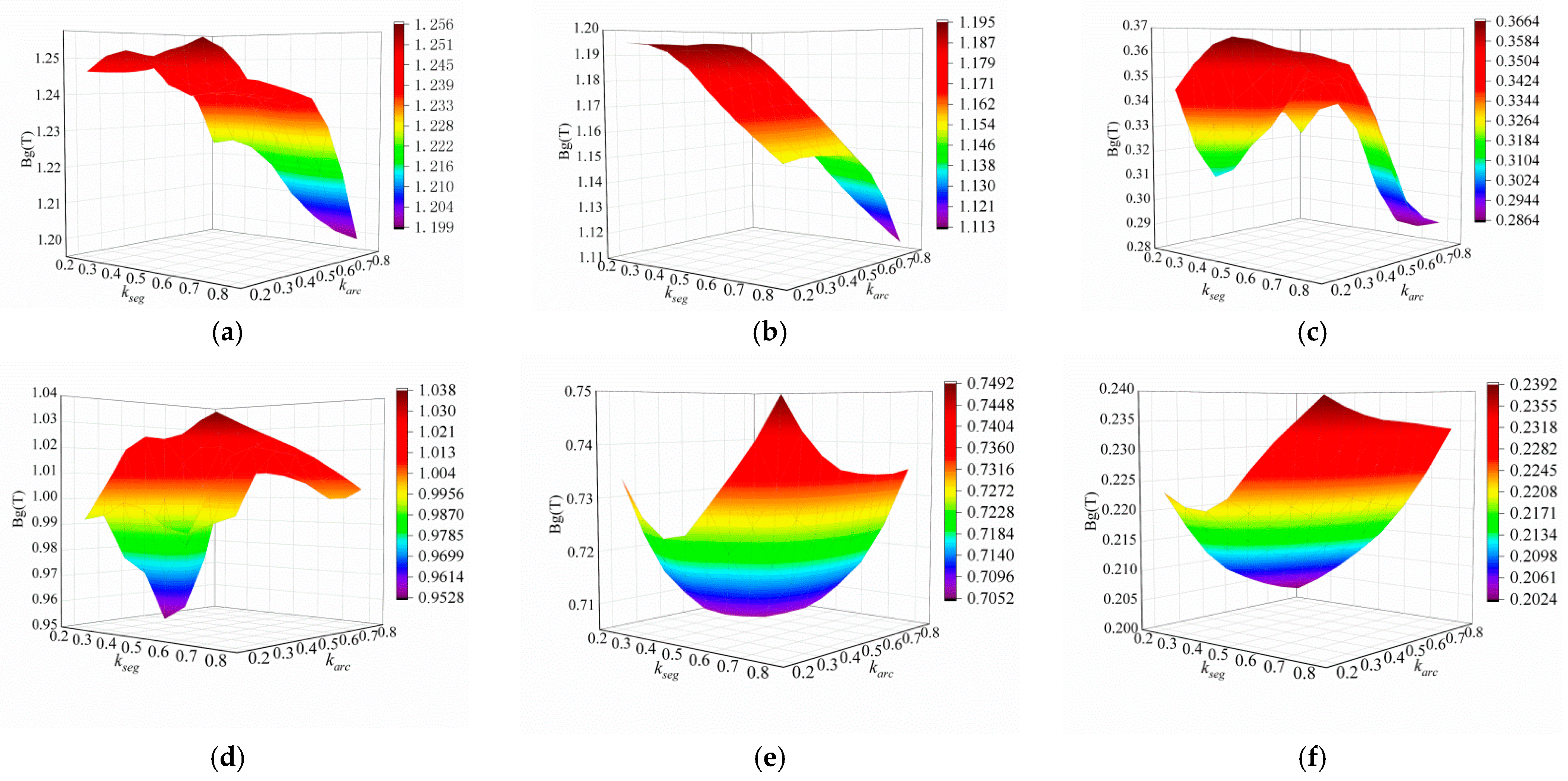
3.5. Air-Gap Flux Density
- 1.
- When the magnetic field line passes through all flux-barriers and comes out of region 11, the flux density is expressed as,where, or ;where ;
- 2.
- When the magnetic field line only does not passes through the outermost magnetic barriers, that is, through the first four layers of magnetic barrier, and comes out of region 12 or region 21, the magnetic density is expressed as,where, or ;where, or ;
- 3.
- When the magnetic field line passes through the first three magnetic barriers, and comes out of region 13 or region 31, the magnetic density is expressed as,where, or ;where, or ;
- 4.
- When the magnetic field line passes through the first and the second magnetic barriers, and comes out of region 14 or region 41, the magnetic density is expressed as,where, or ;where, or ;
- 5.
- When the magnetic field line only passes through the innermost flux-barrier, and comes out of region 15 or region 51, the magnetic density is expressed as,where, or ;where, or ;
- 6.
- When the magnetic field line does not pass through any flux-barrier and comes out of region 22, the magnetic density is expressed as,where, or .
3.6. Torque and Performance Evaluation Index
4. Analysis and Comparison of Air-Gap Flux Density and Torque Performance
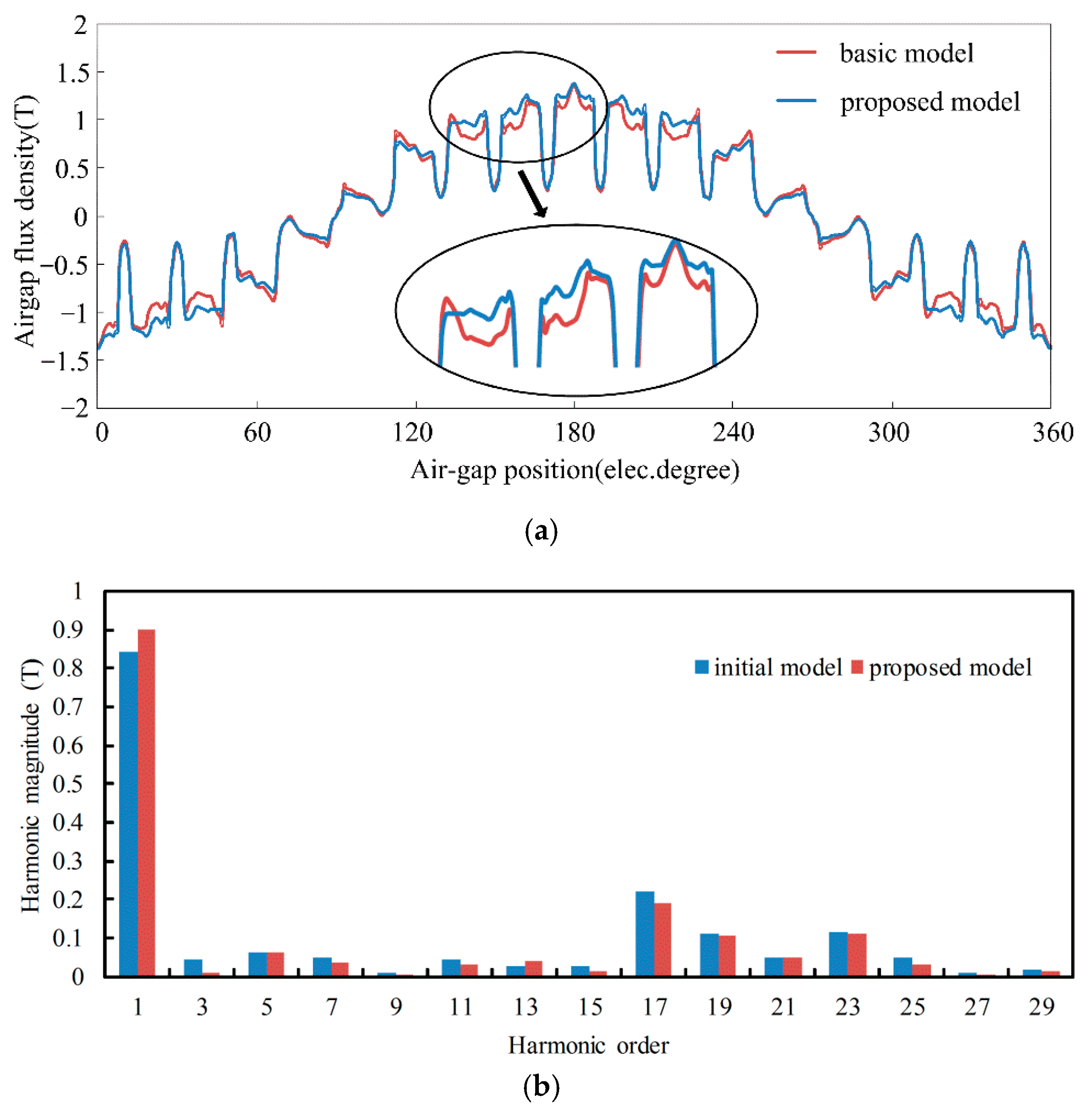
4.1. Distribution of Air-Gap Flux Density
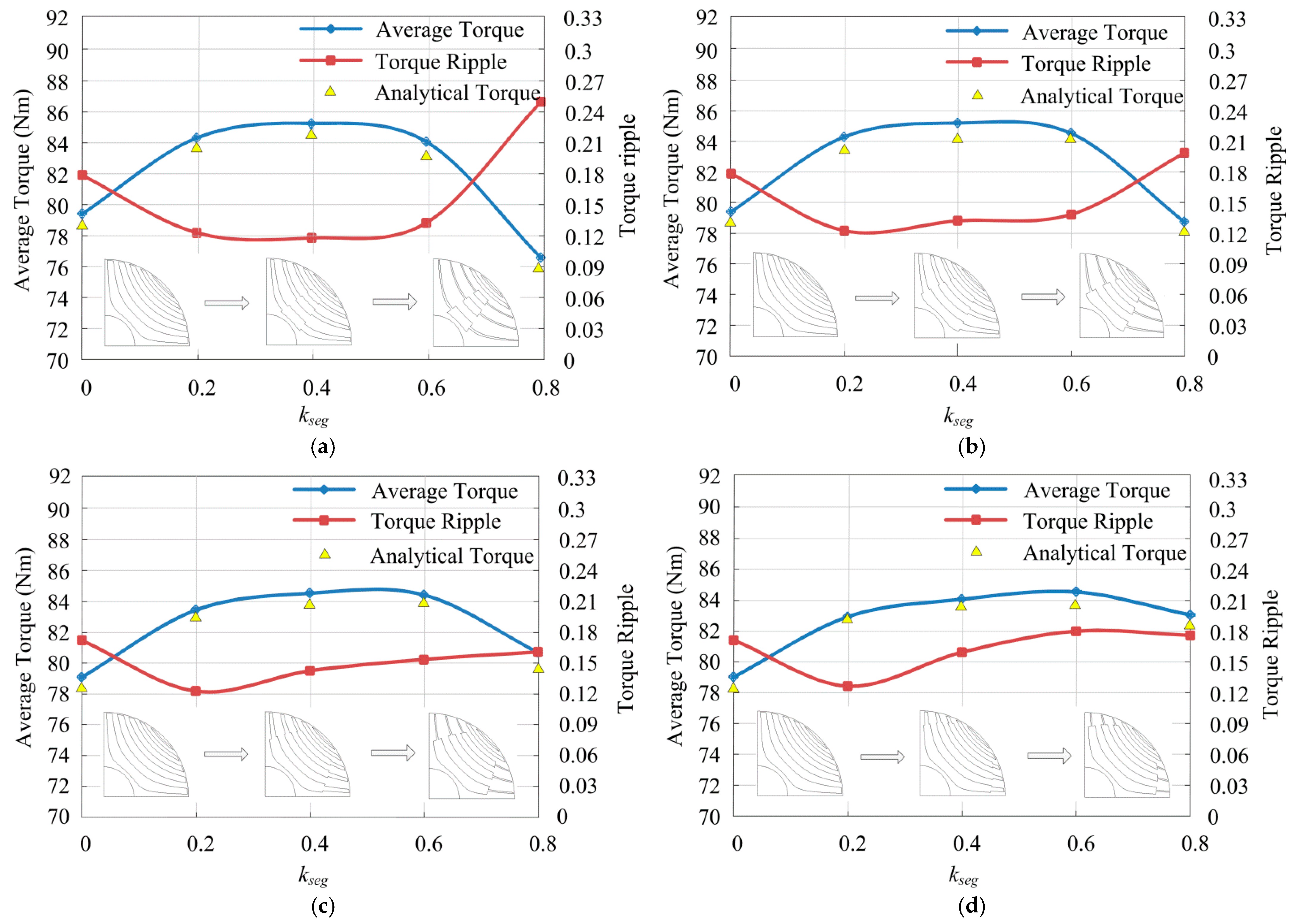
4.2. Analysis of Torque Performance
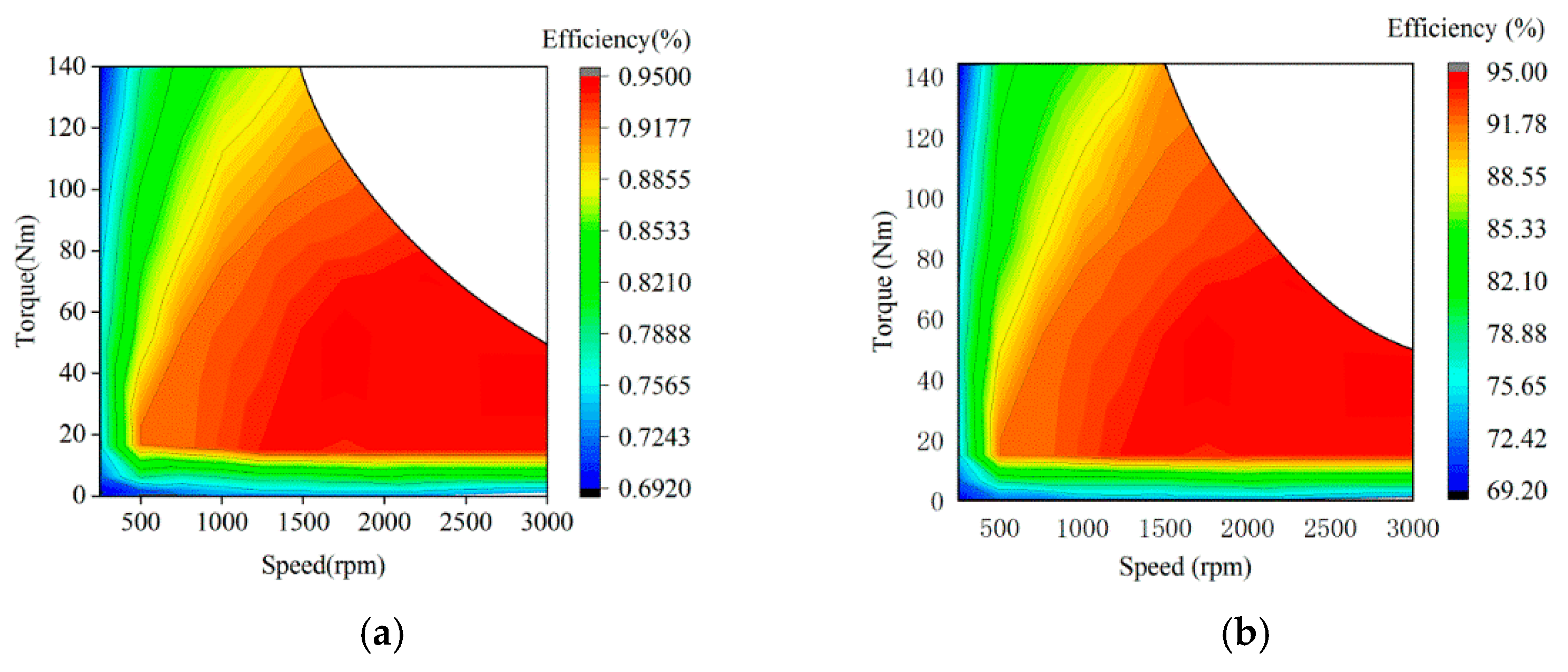
4.3. Comparison of Air-Gap Flux Density and Torque Performance
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Okamoto, Y.; Yamashita, Y. Design Optimization of Synchronous Reluctance Motor for Reducing Iron Loss and Improving Torque Characteristics Using Topology Optimization Based on Level-set Method. IEEE Trans. Magn. 2020, 56, 1–4. [Google Scholar]
- Kim, S.; You, Y. Optimization of a Permanent Magnet Synchronous Motor for e-Mobility Using Metamodels. Appl. Sci. 2022, 12, 1625. [Google Scholar] [CrossRef]
- Liu, C.T.; Shih, P.C.; Cai, Z.H.; Yen, S.C.; Lin, S.Y. Rotor Conductor Arrangement Designs of High-Efficiency Direct-on-Line Synchronous Reluctance Motors for Metal Industry Applications. IEEE Trans. Ind. Appl. 2020, 56, 4337–4344. [Google Scholar]
- Islam, M.Z.; Choi, S.; Elbuluk, M.E.; Bonthu, S.S.R.; Arafat, A.; Baek, J. Design of External Rotor Ferrite-Assisted Synchronous Reluctance Motor for High Power Density. Appl. Sci. 2021, 11, 3102. [Google Scholar] [CrossRef]
- Murataliyev, M.; Degano, M.; Galea, M. A Novel Sizing Approach for Synchronous Reluctance Machines. IEEE Trans. Ind. Electron. 2021, 68, 2083–2095. [Google Scholar] [CrossRef]
- Giacomo, B.; Nicola, B.; Hanafy, M. A Nonlinear Analytical Model for the Rapid Prediction of the Torque of Synchronous Reluctance Machines. IEEE Trans. Energy Convers. 2018, 33, 1539–1546. [Google Scholar]
- Mohammadi, M.H.; Rahman, T.; Silva, R.; Li, M.; Lowther, D.A. A Computationally Efficient Algorithm for Rotor Design Optimization of Synchronous Reluctance Machines. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar] [CrossRef]
- Mirazimi, M.S.; Kiyoumarsi, A. Magnetic Field Analysis of SynRel and PMASynRel Machines with Hyperbolic Flux Barriers Using Conformal Mapping. IEEE Trans. Transp. Electrif. 2020, 6, 52–61. [Google Scholar] [CrossRef]
- Kabir, M.A.; Husain, I. Application of a Multilayer AC Winding to Design Synchronous Reluctance Motors. IEEE Trans. Ind. Appl. 2018, 54, 5941–5953. [Google Scholar] [CrossRef]
- Tawfiq, K.B.; Ibrahim, M.N.; EI-Kholy, E.E.; Sergeant, P. Performance Improvement of Synchronous Reluctance Machines—A Review Research. IEEE Trans. Magn. 2021, 57, 1–11. [Google Scholar] [CrossRef]
- Yu, H.; Yu, G.; Xu, Y.; Zou, J. Torque Performance Improvement for Slotted Limited-Angle Torque Motors by Combined SMA Application and GA Optimization. IEEE Trans. Magn. 2021, 57, 1–5. [Google Scholar] [CrossRef]
- Yan, D.; Xia, C.; Guo, L.; Wang, H.; Shi, T. Design and Analysis for Torque Ripple Reduction in Synchronous Reluctance Machine. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar]
- Tessarolo, A. Modeling and Analysis of Synchronous Reluctance Machines with Circular Flux-barriers through Conformal Mapping. IEEE Trans. Magn. 2015, 51, 1–11. [Google Scholar] [CrossRef]
- Bianchi, N.; Degano, M.; Fornasiero, E. Sensitivity analysis of torque ripple reduction of Synchronous Reluctance and Interior PM Motors. IEEE Trans. Ind. Appl. 2014, 51, 187–195. [Google Scholar] [CrossRef]
- Ban, B.; Stipetic, S.; Jercic, T. Minimum Set of Rotor Parameters for Synchronous Reluctance Machine and Improved Optimization Convergence via Forced Rotor Barrier Feasibility. Energies. 2021, 14, 2744. [Google Scholar] [CrossRef]
- Vagati, A.; Pastorelli, M.; Franceschini, G.; Petrache, S.C. Design of low-torque-ripple synchronous reluctance motors. IEEE Trans. Ind. Appl. 1998, 34, 758–765. [Google Scholar] [CrossRef]
- Murataliyev, M.; Degano, M.; Nardo, M.D.; Bianchi, N.; Tessarolo, A.; Jara, W.; Galea, M.; Gerada, C. Homothetic Design in Synchronous Reluctance Machines and Effects on Torque Ripple. IEEE Trans. Energy Convers. 2021, 36, 2195–2205. [Google Scholar] [CrossRef]
- Chen, Q.; Yan, Y.; Xu, G.; Xu, M.; Liu, G. Principle of Torque Ripple Reduction in Synchronous Reluctance Motors with Shifted Asymmetrical Poles. IEEE Trans. Emerg. Sel. Topics Power Electron. 2020, 8, 2611–2622. [Google Scholar] [CrossRef]
- Pellegrino, G.; Cupertino, F.; Gerada, C. Automatic Design of Synchronous Reluctance Motors Focusing on Barrier Shape Optimization. IEEE Trans. Ind. Appl. 2015, 51, 1465–1474. [Google Scholar] [CrossRef]
- Bacco, G.; Bianchi, N. Design Criteria of Flux-Barriers in Synchronous Reluctance Machines. IEEE Trans. Ind. Appl. 2019, 55, 2490–2498. [Google Scholar] [CrossRef]
- Bianchi, N.; Bolognani, S.; Bon, D.; Pre, M.D. Torque Harmonic Compensation in a Synchronous Reluctance Motor. IEEE Trans. Energy Convers. 2008, 23, 466–473. [Google Scholar] [CrossRef]
- Wang, K.; Zhu, Z.; Ombachg, G.; Koch, M.; Zhang, S. Torque ripple reduction of synchronous reluctance machines: Using asymmetric flux-barrier. Compel Int. J. Comput. Math. Eletr. Electron. Eng. 2015, 34, 18–31. [Google Scholar] [CrossRef]
- Pellegrino, G.; Cupertino, F.; Gerada, C. Barriers shapes and minimum set of rotor parameters in the automated design of synchronous reluctance machines. In Proceedings of the 2013 International Electric Machines Drives Conference(IEMDC), Chicago, IL, USA, 12–15 May 2013; pp. 899–904. [Google Scholar]
- Gamba, M.; Pellegrino, G.; Cupertino, F. Optimal number of rotor parameters for the automatic design of Synchronous Reluctance machines. In Proceedings of the 2014 International Conference on Electrical Machines (ICEM), Berlin, Germany, 2–5 September 2014; pp. 1334–1340. [Google Scholar]
- Bacco, G.; Bianchi, N. Choice of flux-barriers position in synchronous reluctance machines. In Proceedings of the 2017 IEEE Energy Conversion Congress and Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 1872–1879. [Google Scholar]
- Bianchi, N. Synchronous Reluctance and PM Assisted Reluctance Motors. In The Rediscovery of Synchronous Reluctance and Ferrite Permanent Magnet Motors—Tutorial Course Notes; Springer International Publishing AG: Cham, Switzerland, 2016; pp. 27–57. [Google Scholar]
- Zhu, L.; Jiang, S.Z.; Zhu, Z.Q.; Chan, C.C. Analytical Methods for Minimizing Cogging Torque in Permanent-Magnet Machines. IEEE Trans. Magn. 2009, 45, 2023–2031. [Google Scholar] [CrossRef]
- Ferrari, S.; Pellegrino, G. FEAfix: FEA Refinement of Design Equations for Synchronous Reluctance Machines. IEEE Trans. Ind. Appl. 2020, 56, 256–266. [Google Scholar] [CrossRef]
- Barba, P.D. Multiobjective Shape Design in Electricity and Magnetism; Springer: New York, NY, USA, 2010; pp. 147–155. [Google Scholar]
- Babetto, C.; Bacco, G.; Bianchi, N. Synchronous Reluctance Machine Optimization for High-Speed Applications. IEEE Trans. Energy Convers. 2018, 33, 1266–1273. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Parameter | Symbol | Value |
|---|---|---|---|---|---|
| Rated phase voltage | 220 V | Stack length | 155 mm | ||
| Rated phase current | 21.79 A | Number of phases | 3 | ||
| Rated speed | 1500 rmp | Number of slots per pole per phase | 3 | ||
| Frequency | 50 Hz | Number of pole pairs | 2 | ||
| Air-gap length | 0.5 mm | Number of parallel branches | 1 | ||
| Outer stator diameter | 260 mm | Number of strands | 2 | ||
| Inner stator diameter | 170 mm | Wingding layers | 1 | ||
| Outer rotor diameter | 169 mm | Winding factor | 0.95 | ||
| Inner rotor diameter | 60 mm | Stacking factor | 0.95 |
| Contents | Initial Motor | Proposed Motor | Unit |
|---|---|---|---|
| d-axis inductance | 108.2 | 112.1 | mH |
| q-axis inductance | 19.3 | 17.8 | mH |
| Core loss | 112.05 | 90.05 | W |
| Stranded loss | 692.47 | 670.58 | W |
| Sensitivity | 0.32 | 0.12 | - |
| Efficiency | 91.15 | 92.67 | % |
| Power factor | 0.69 | 0.72 | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, J.; Dong, Y.; Sun, H.; Liu, R.; Zhu, G. Flux-Barrier Design and Torque Performance Analysis of Synchronous Reluctance Motor with Low Torque Ripple. Appl. Sci. 2022, 12, 3958. https://doi.org/10.3390/app12083958
Liang J, Dong Y, Sun H, Liu R, Zhu G. Flux-Barrier Design and Torque Performance Analysis of Synchronous Reluctance Motor with Low Torque Ripple. Applied Sciences. 2022; 12(8):3958. https://doi.org/10.3390/app12083958
Chicago/Turabian StyleLiang, Jing, Yan Dong, Hexu Sun, Rongzhe Liu, and Guantong Zhu. 2022. "Flux-Barrier Design and Torque Performance Analysis of Synchronous Reluctance Motor with Low Torque Ripple" Applied Sciences 12, no. 8: 3958. https://doi.org/10.3390/app12083958
APA StyleLiang, J., Dong, Y., Sun, H., Liu, R., & Zhu, G. (2022). Flux-Barrier Design and Torque Performance Analysis of Synchronous Reluctance Motor with Low Torque Ripple. Applied Sciences, 12(8), 3958. https://doi.org/10.3390/app12083958