1. Introduction
Artificial intelligence (AI) such as neural networks has been progressing rapidly to fit a wide range of applications in recent years. For example, image recognition [
1,
2], Internet-of-Things-based speech emotion detection [
3], robotics [
4], natural language processing [
5], medical science [
6,
7], and security [
8,
9,
10] are areas in which deep learning is being used. However, machine learning models that are trained with high costs and include confidential information from the training phase could quickly become a target for attack. Therefore, security over AI is a growing concern.
Lately, communication, privacy, and latency issues have caused certain deep neural networks to be calculated on edge devices. Due to the accessibility of edge devices, physical attacks such as side-channel attacks could be used to recover the architectures and parameters of neural networks. Side-channel attacks are used to break specific neural network accelerators [
11,
12]. Furthermore, although physical proximity is not necessary, in a setting where the attacker and the victim are located on the same machine and sharing its cache, the cache side-channel attack to recover neural network architectures is demonstrated to attack edge AI [
13,
14].
A recent work by Batina et al. showed that a black box multilayer perceptron (MLP) implemented on an 8 bit CPU and convolutional neural network implemented on a 32 bit CPU can be fully reverse-engineered using merely side-channel leakages [
15]. The recovery of the network architecture is composed of four key parameters: the activation function, the pre-trained weights, the number of hidden layers, and the number of neurons in each layer. In this work, we focused on revealing the activation function. In [
15], the activation function was discerned by timing attack from its distinctive computation time. The distribution patterns of the activation function calculation time were compared with the profile of each activation function to determine it. We replicate this attack in
Section 3 and used it on four more activation functions to determine the strength of the attack.
The timing attack used in [
15] had several limitations. Therefore, a different approach that uses the patterns of the electromagnetic (EM) trace directly to discern the computed operation was proposed. Takatoi et al. [
16] identified activation functions using simple electromagnetic analysis (SEMA). The idea was that since the operations leak information into the measurements, the operations from the measurements could be recovered if the noise could be reduced from the trace. The signal processing in their work allowed the peaks to have distinctive features for each operation. The target activation functions and the implementation platform were the same for both [
15,
16]. By comparing SEMA-based identification and timing-based identification, Takatoi et al. considered SEMA as a better approach since it requires less measurements and is more resistant to implementation variations.
In [
16], the four activation functions identified were selected according to the popularity of those functions. Two of the activation functions are very easy to identify from the others due to the distinct calculation complexity, and only two are left to compare with the same calculation complexity. However, there are many similar activation functions proposed and used in AI [
17,
18,
19]. This work additionally selected another four activation functions in the activation function set to investigate the limitations of SEMA in identifying the similar activation functions. We were able to match the features to the activation functions for identification by using the improved signal processing and inputs for the activation functions. We believe this attack could be applied to different neural network models if the activation functions are being computed in the network without side-channel countermeasures.
The SEMA attack in this paper successfully identifies eight activation functions explained in
Section 2 that were implemented on an Arduino Uno. By comparing SEMA-based identification and timing-based identification in a similar scenario, we considered SEMA to be more preferable as it requires less measurements and is more resistant to implementation variations.
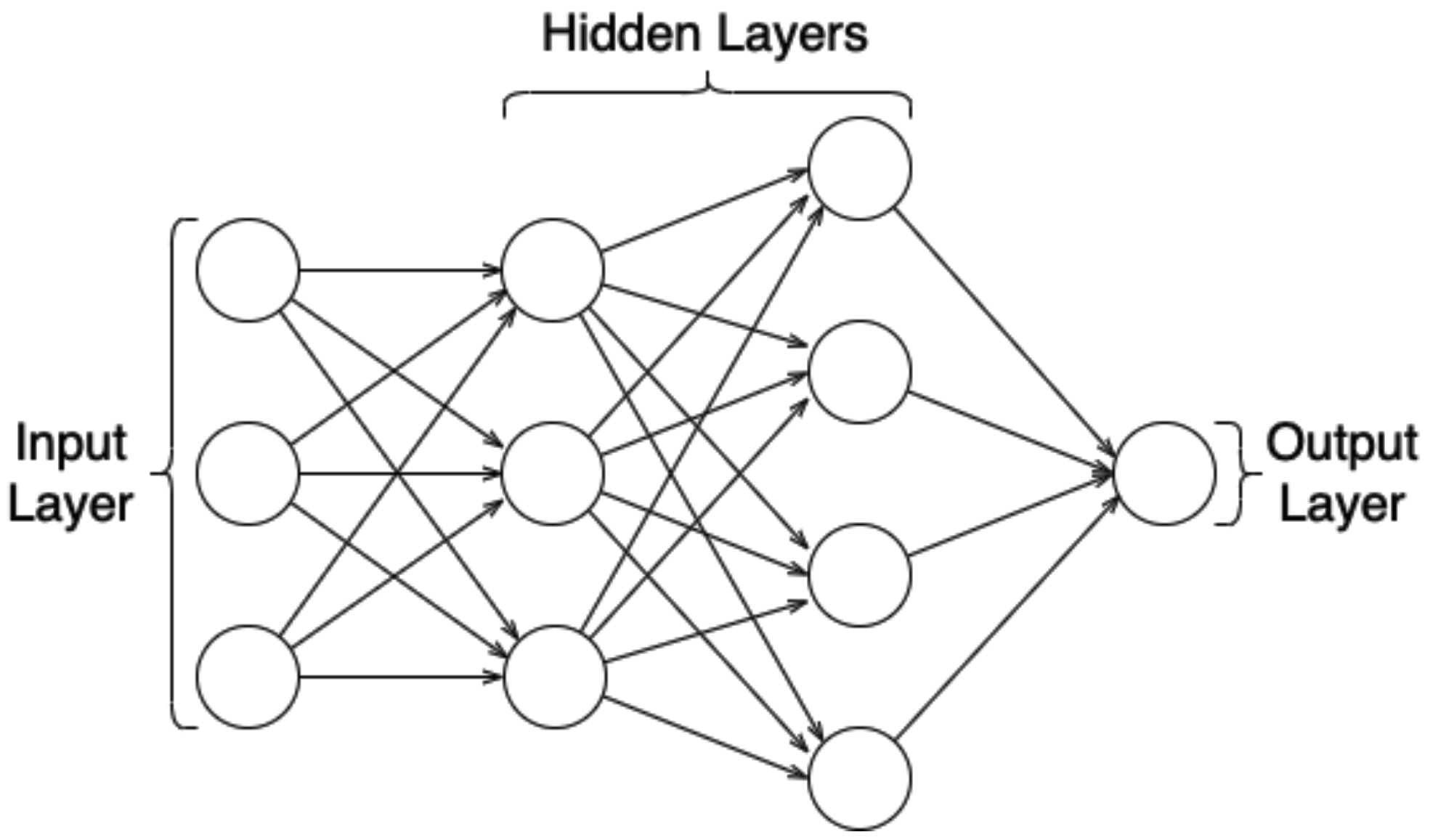
We chose to recover the activation functions because they are used in many neural networks and play a very important role in the network. Non-linear functions are used as activation functions to output a result from the sum of the inputs and to solve non-linear problems. Designing and choosing activation functions that enable fast training of accurate deep neural networks is an active area of research. From this, it can be said that it is important to conceal the information of activation functions used in a neural network architecture.
As for the required measurements, SEMA requires only one or a few averaged EM traces, compared to the timing attack, which requires thousands of EM traces. Furthermore, we expect less implementation dependency, since compared to the timing information, the SEMA utilizes more information to identify the activation functions. We observed the activation function operations from the peaks of the EM trace; thus, this method has potential to overcome constant time mitigation as well.
In this work, we make the following contributions:
We simulated the timing attack performed by Batina et al. [
15] to recover the activation functions on various similar activation functions. The analysis of the timing behavior of the Leaky ReLU function [
20], SELU function [
17], Swish function [
18], and Fast Sigmoid function [
19] was first performed in this work and showed that all of the activation functions could be identified. However, the different implementations of activation functions made for more difficult classification and showed the potential versatility of the SEMA-based attack to different activation function implementations. This contribution corresponds to
Section 3.
We utilized the idea proposed by Takatoi et al. [
16] of using SEMA to identify activation functions to further upgrade the attack and analyze the limits of SEMA-based identification. Our work was also implemented and demonstrated on Arduino Uno. We improved the signal processing for noisy measurements by erasing the trend patterns that were not intrinsic to the data. We then report the results of the SEMA attack performed on an MLP using eight similar activation functions to show the limits of this attack. The SEMA attack can observe the differences in operations, but cannot observe the differences in values from the traces. Although this makes it difficult for the SEMA attack to identify activation functions with the same operations with differing values in the functions, this attack is still an effective method to distinguish many popular activation functions. This contribution corresponds to
Section 5.
We discuss the activation functions that are difficult to identify with the timing attack and SEMA attack and the potential of the SEMA attack to be used on different platforms, such as a GPU. This contribution corresponds to
Section 5.6.
The rest of this article is organized as follows. In
Section 2, we briefly review the background of this work, including the activation functions used in this article. In
Section 3, we explain the timing-based activation function identification. In
Section 4, we explain the experimental setup of the SEMA attack. In
Section 5, we describe the identification of similar activation functions using the SEMA attack and discuss the limits of the attack. In
Section 6, we survey and compare the related works. Finally, we summarize this work in
Section 7.
3. Identification Using Timing
In [
15], Batina et al. used timing information to identify activation functions. Specifically, the activation function was discerned by the distribution of the calculation timing for a set of inputs. The timing information of the activation function was measured from EM traces. The measurements were taken when the neural network was processing random inputs in the range they had chosen beforehand. A total of 2000 EM measurements were captured for each activation function. By plotting the processing time of each activation function by inputs, distinct signatures can be seen from each timing behavior. By making a profile, timing patterns or averaged timing can be compared with the profile of each function to determine the activation function. Hereafter, we discuss the limitations of the approach by recreating the attack with the activation functions described in
Section 2.
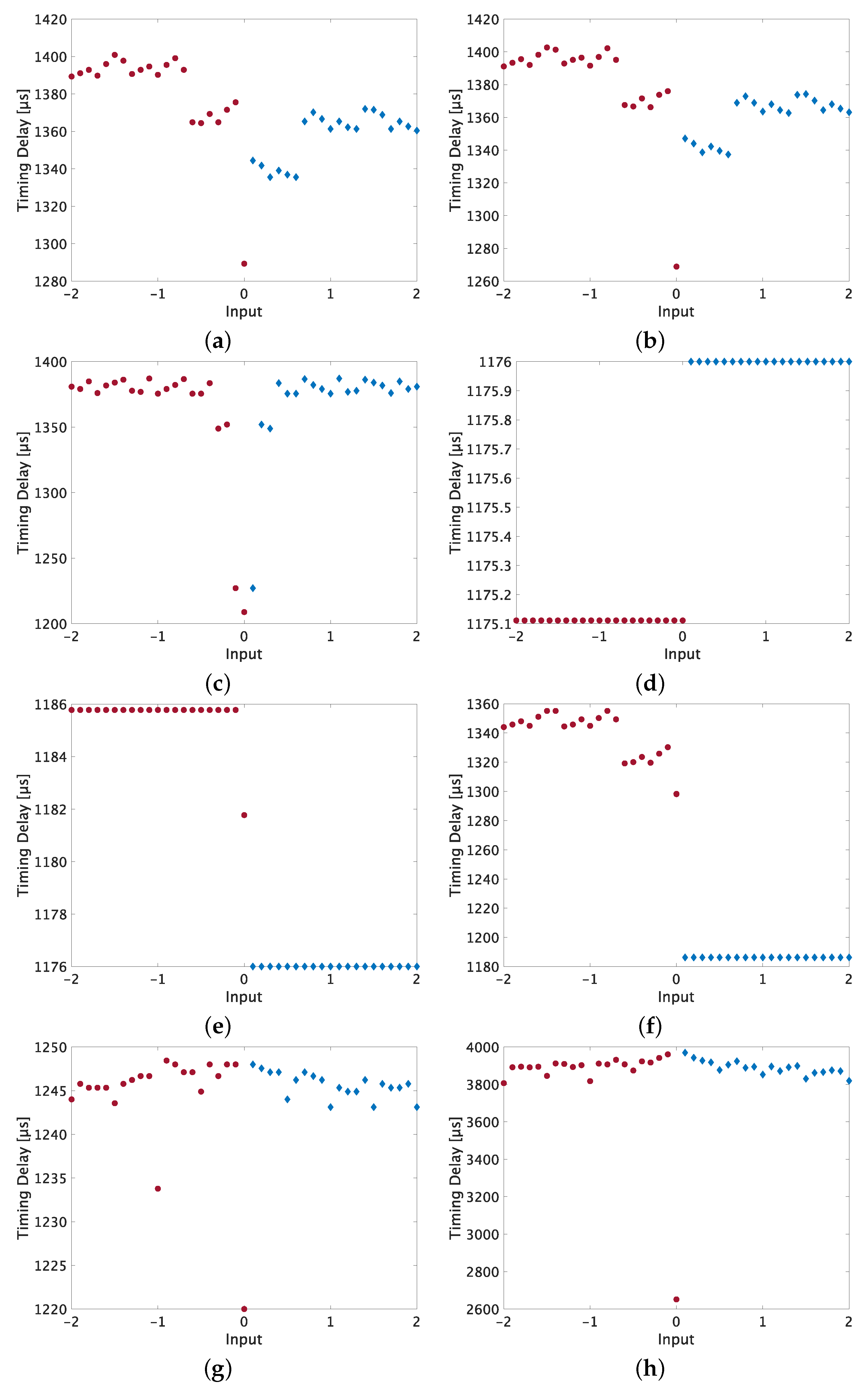
To analyze the timing attack, we replicated the timing attack. We used the Arduino Uno simulator [
23] to recreate the timing behavior, as shown in
Figure 2a,c,d. We also performed the timing attack on similar activation functions, shown in
Figure 2b,e–h. The timing delay is displayed in μs. The experiments were performed using an Arduino Uno simulator and Tinkercad Circuits without the use of physical hardware [
23]. By using the simulator, we were able to gain more data due to the fast process. The processing times were averaged 10 times per input. We measured the calculation time of the activation functions with a micros function, which returns how many microseconds passed since the Arduino board started processing. Therefore, there is some difference in timing delay to when acquiring with the oscilloscope. However, this is in principle the same as measuring on a real system, as it counts the number of clocks, which is precise enough for our experiment.
3.1. Timing Attack on Activation Functions
The Tanh function is distinguished from the Sigmoid function since it is more symmetric in the timing pattern for positive and negative inputs compared to Sigmoid, as shown in
Figure 2a,c. We also recreated the attack on the Swish function, drawn in
Figure 2b. By observing the timing signatures, it is difficult to tell the Sigmoid function apart from the Swish function. The two functions are computed in a very similar way, and the pattern is indistinguishable with the timing attack. However, the minimum computation time for the Sigmoid function and Swish function is slightly different, being the only element to distinguish.
The three functions, ReLU, Leaky ReLU, and SELU, have a similar computation time; however, they have different equations for positive and negative inputs, causing distinct patterns. The timing patterns of these functions are depicted in
Figure 2d–f. The ReLU function and Leaky ReLU function are very similar and are a mirror image of each other. The Leaky ReLU function has a independent computation time at input 0; however, this is due to the implementation method. The Leaky ReLU function, i.e., Equation (
6), can also be implemented like Equation (
10) to blend the computation time of input 0 with the other positive inputs.
By comparing
Figure 2a,b,d–f, the SELU function appears to be a mix of a pattern similar to the ReLU function for positive inputs and a pattern similar to the Sigmoid function for negative inputs. The unique pattern for the negative input is due to the exponential operation in the function.
The Fast Sigmoid function is an approximation of the Sigmoid function. By observing
Figure 2g,h, the patterns are very unique to the other functions. The timing patterns appear to be symmetrical with some individual timing for some inputs. The computation times also differ quite significantly from the other functions, making for easy classification.
The features of the timing behavior can be summarized as follows:
The Sigmoid and Swish functions are the same pattern, with a slightly different minimum computation time.
The Tanh function is not symmetrical compared to the Sigmoid function, which has a similar computation time.
The ReLU and Leaky ReLU functions are mirror images of each other with a similar computation time.
The SELU function is similar to the Sigmoid function for negative inputs and similar to the ReLU function for positive inputs.
The Fast Sigmoid function is symmetrical, yet significantly different from the other functions in the computation time.
3.2. Limitations
Although some functions such as the SELU function and Fast Sigmoid function are easily recognized from the timing patterns, we believe the other functions will be hard to define.
First, the distinct signatures of the timing behavior for activation functions could depend on the implementation method. The two activation functions used in [
15], the Sigmoid and Tanh functions, were distinguished by the differences in the timing pattern. The Tanh function has a symmetric pattern compared to the Sigmoid function. However, Takatoi et al. implemented the Tanh function differently, causing the symmetric pattern to break and have a similar timing pattern to the Sigmoid function [
16]. They insisted that the timing pattern for activation functions can change depending on the implementations, making them hard to characterize. The Taylor series approximation, for example, is one way to implement the exponential function. By using such an approximation, the Sigmoid function could be computed in a uniform timing, making the function a common pattern with no uniqueness. By trading off the computation time, the ReLU and Leaky ReLU functions could also be processed in a uniform timing by adding a dummy operation for either negative or positive inputs. Using such countermeasures, this timing attack is not as effective.
The other limitation is that thousands of measurements with uniformly distributed activation function inputs are required to plot the distribution of the calculation time. In [
15], timing measurements were performed when the network was processing random inputs in the range, i.e.,
, and Takatoi et al. found that this input refers to the inputs to the activation function [
16]. To plot the timing behavior for different activation functions based on the inputs, there would be a need to calculate the uniform input to the activation functions. They argued that without the knowledge of the weights, the bias, and the number of neurons in the layer, this timing attack will be difficult. Even with the knowledge of the weights, bias, and network structure, it would be difficult to obtain all of the inputs needed to make the profile of the timing behavior. To plot this graph specifically as in this previous work, a total of 2000 inputs are needed, making this graph difficult to plot, as a complex calculation is needed.
Accordingly, we used an attack method to substitute the timing-based attack. The attack is a SEMA-based approach first proposed by Takatoi et al. [
16] that has potential to overcome these limitations.
5. Identification Using SEMA
In this section, we explain the identification of similar activation functions using SEMA. The identification was performed in the following procedures:
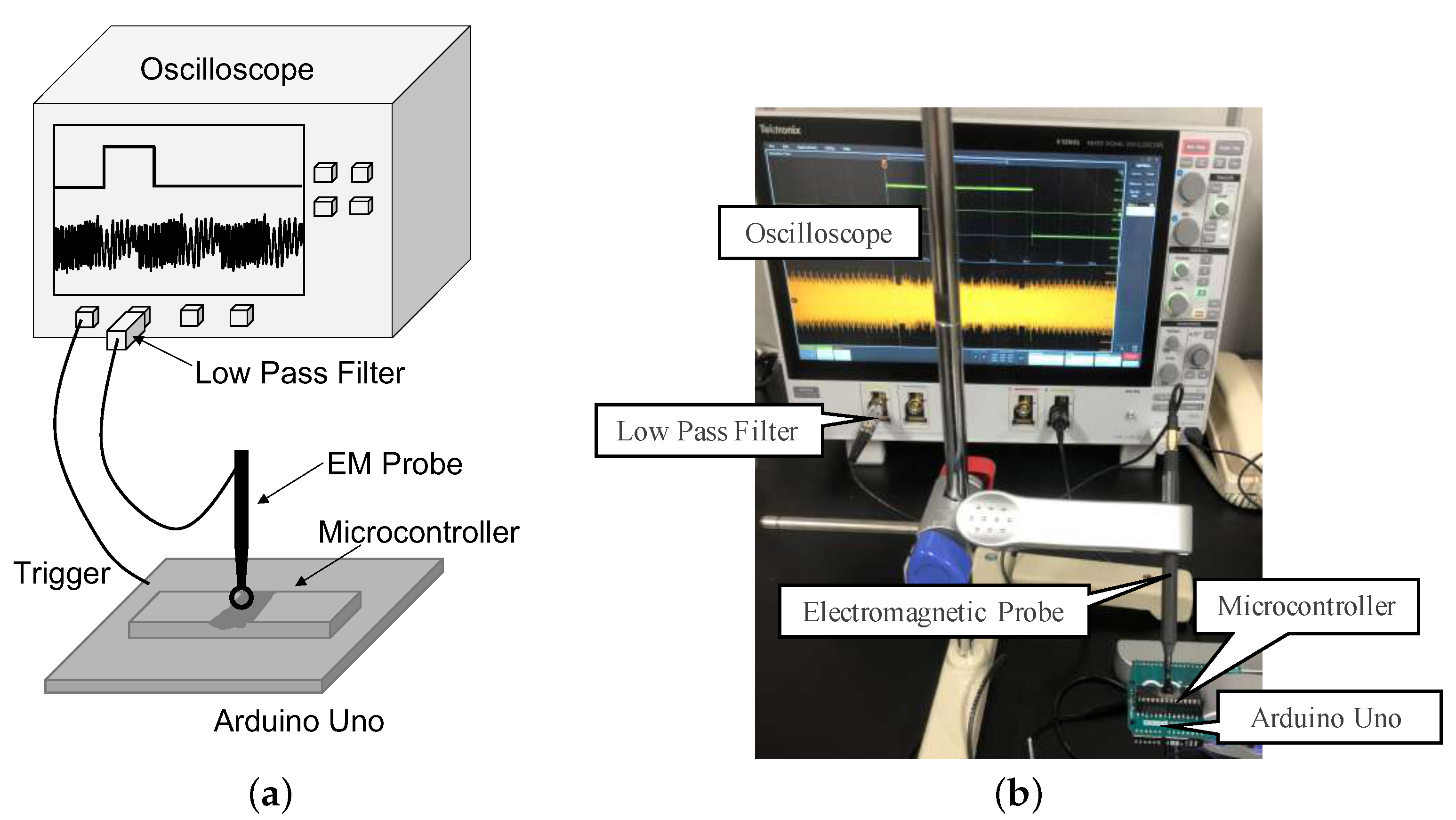
We first acquired the side-channel trace from the device. In our work, we used EM traces.
For the next step, we applied signal processing to the acquired trace to obtain the desired trace for visual inspection.
We then observed the trace and split the trace into two major parts, the multiplication operation of the weights and the activation function phase.
We classified the traces by the computation time of the activation functions. This was to compare the patterns of peaks in the next step with only similar activation functions that are difficult to distinguish with just timing.
Finally, we distinguished the similar activation functions by the pattern of the peaks.
5.1. Signal Processing
After the EM measurement taken from the microcontroller, we applied several steps to retrieve distinctive patterns from the EM trace as signal processing. We used a 5-step methodology to obtain the desired EM trace. We improved the signal processing used in [
16] to be used in situations with more noise in the traces.
First, a measurement (or trace) was taken from the target device. Next, averaging was applied to the measured trace. Then, to extract the peaks, we computed the upper half of the EM trace’s envelope. At this point, by smoothing the trace, the desired trace was acquired. For the last step, we erased the trend patterns from the trace that hindered the analysis. To make the peak stand out from the averaged trace, we applied signal processing using Matlab. The upper half of the EM trace’s envelope was calculated to check the peak of the trace. However, if only the envelope was calculated, the pulse component still remained. Next, we smoothed the EM trace by removing the high-frequency signal using a Gaussian-weighted moving average filter. Smoothing was applied to the noisy traces keeping important patterns in our measurements while leaving out noise. Finally, to erase the trend patterns that were not intrinsic to the data, which can hinder the analysis, we fit a low-order polynomial to the measurement and subtracted it. After the signal processing, the patterns can be compared more easily with smoothing. The multiplication and activation function can be easily distinguished with their different patterns.
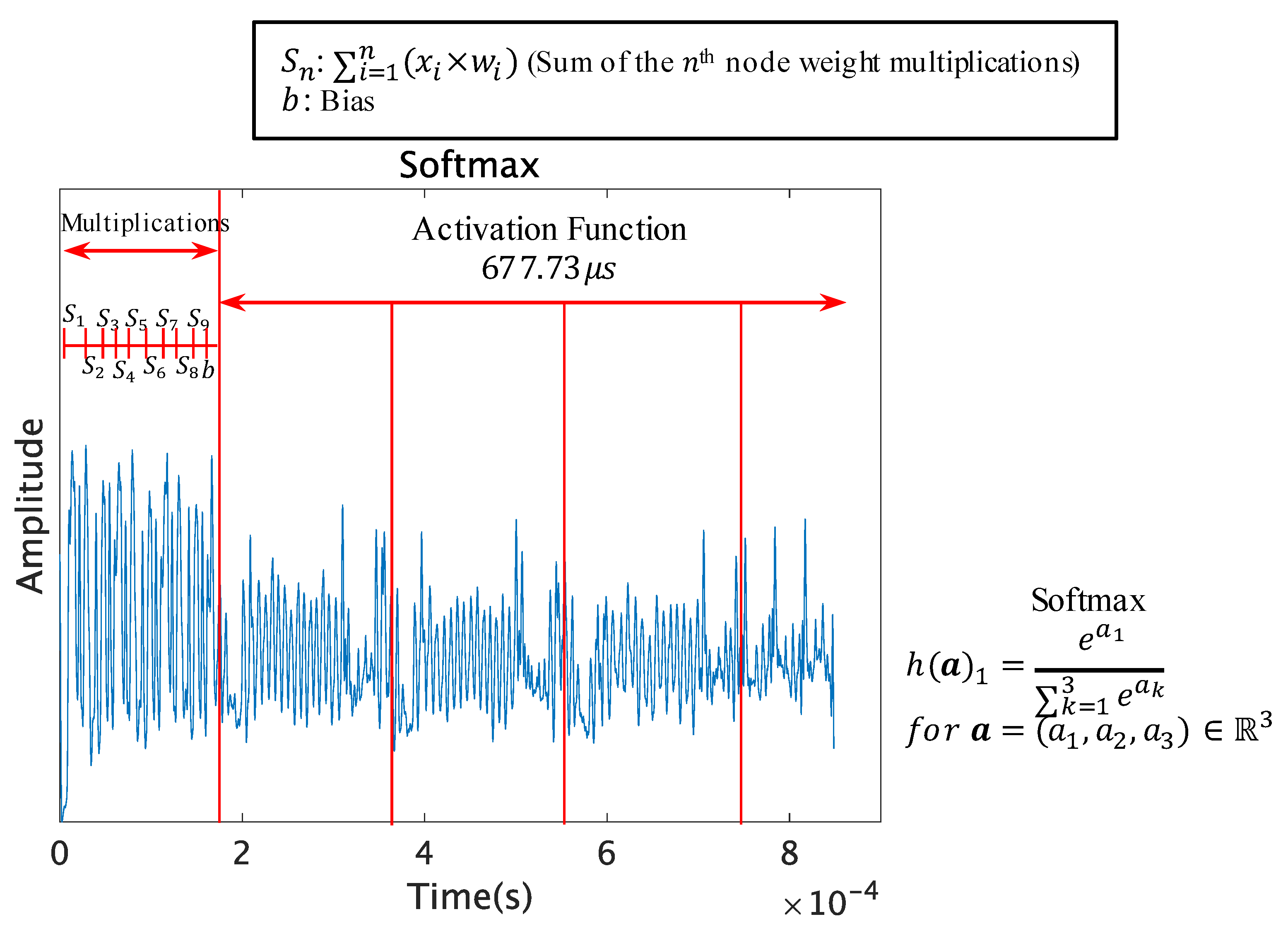
By observing the patterns of the multiplication operation, the weight multiplication, the addition of the outputs, and the addition of the bias can be distinguished from the trace. The multiplication operation is a repeating pattern before the activation function. The activation function can be observed after the repeating pattern of multiplications, and this signal processing allows the unique patterns in the traces to be visually inspected.
5.2. Classification Using Calculation Time
Here, we analyze the processed measurements to discern the activation functions. First, we start by grouping the activation functions by computation time. We analyzed and grouped the computation time of activation functions to make the comparison between the similar activation functions easy. We only used several inputs for this as this phase is merely to make the comparison easier between the similar activation functions, not to completely identify the activation functions.
Table 1 presents the computation time of the activation functions. The approximate range of computation time in this table is the timing that we observed from our setup.
The softmax function and the Fast Sigmoid function both include exponentiation operations that repeat the multiplication of the base. The exponent can vary upon the the number of neurons in the output layer or implementation method. The complexity of the softmax function causes it to take the longest time to process. This activation function can be easily distinguished from the computation time. For the Fast Sigmoid function, it can take a short to medium time to process, depending on the trade-off between complexity and accuracy.
The Sigmoid function, Tanh function, and Swish function have a medium computation time. The exponential function exists in these 3 functions, however not as much as the softmax function, which is the reason for the computing time being far less than the softmax function.
The ReLU function is the simplest function out of all of the functions and can be computed in a very short amount of time. The Leaky ReLU and SELU functions are improvised versions of the ReLU function and therefore have similar computation times. However, the SELU function includes the exponential function for negative inputs, hence having similar computation times to the Sigmoid function when processing negative inputs.
Next, for similar activation functions, we investigated the processed leakage patterns through the patterns of the EM traces.
5.3. Sigmoid, Tanh, and Swish
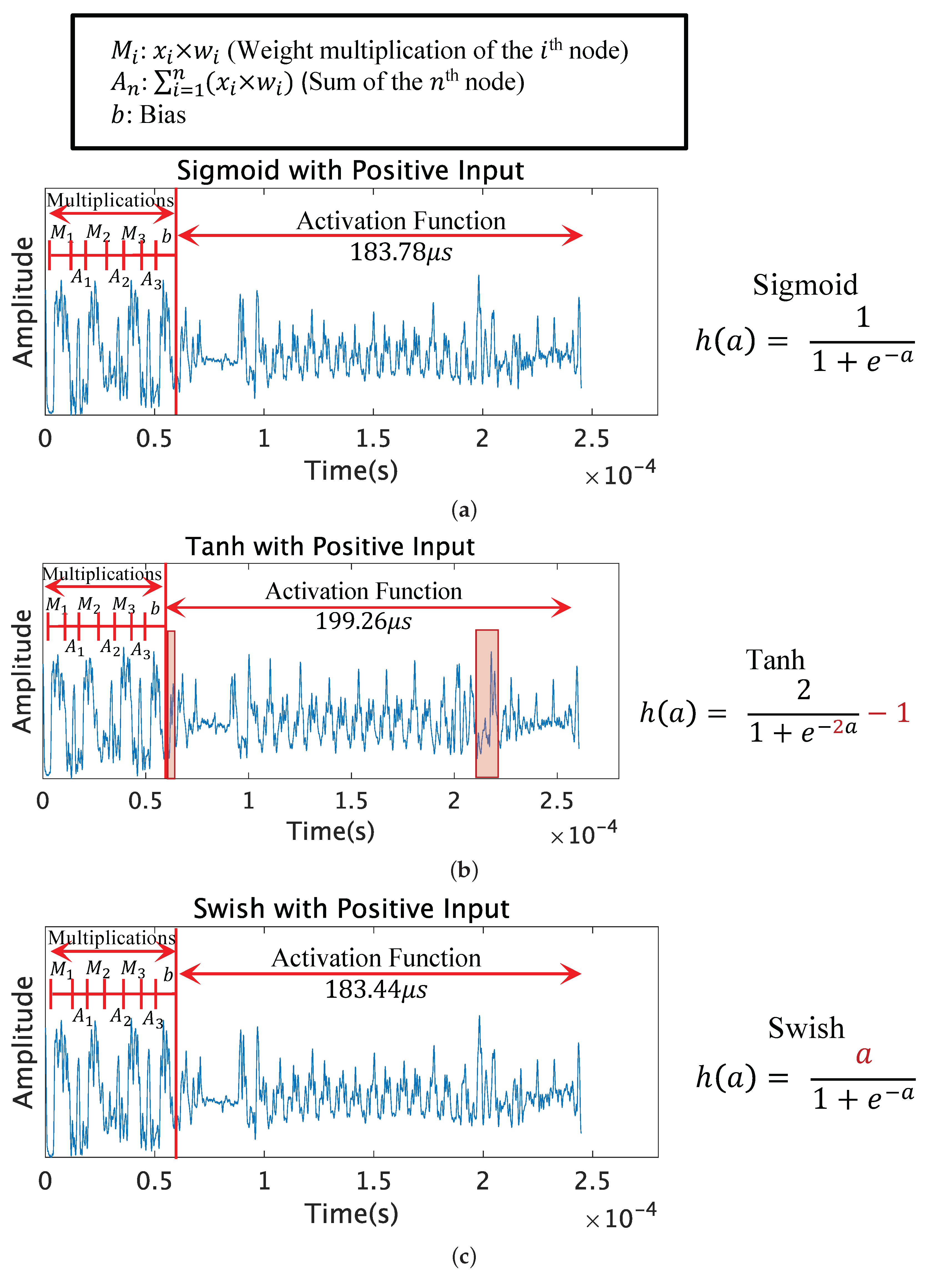
Figure 4 compares the leakage patterns of the Sigmoid, Tanh, and Swish functions with positive inputs, in this case 4.154561. It can be observed that the Sigmoid and Swish functions are identical; however, the Tanh function has a slight difference in peaks. Although there is no obvious gap in the processing time, the peak patterns differ, and extra peaks can be seen in two sections from the Tanh function when comparing with the Sigmoid and Swish function.
The extra peaks observed from the Tanh function are surrounded in a red box shown in
Figure 4b. The first peak can be seen right after the multiplication. The second peak can be seen in the latter half of the activation function. The differences in peaks comes from the difference in the functions. The Tanh function has an additional multiplication and subtraction compared with the Sigmoid function. We observed that these operations cause the difference in the peak patterns. The Sigmoid function and Tanh function can be distinguished with the different peak patterns, with the Tanh function having more peak patterns.
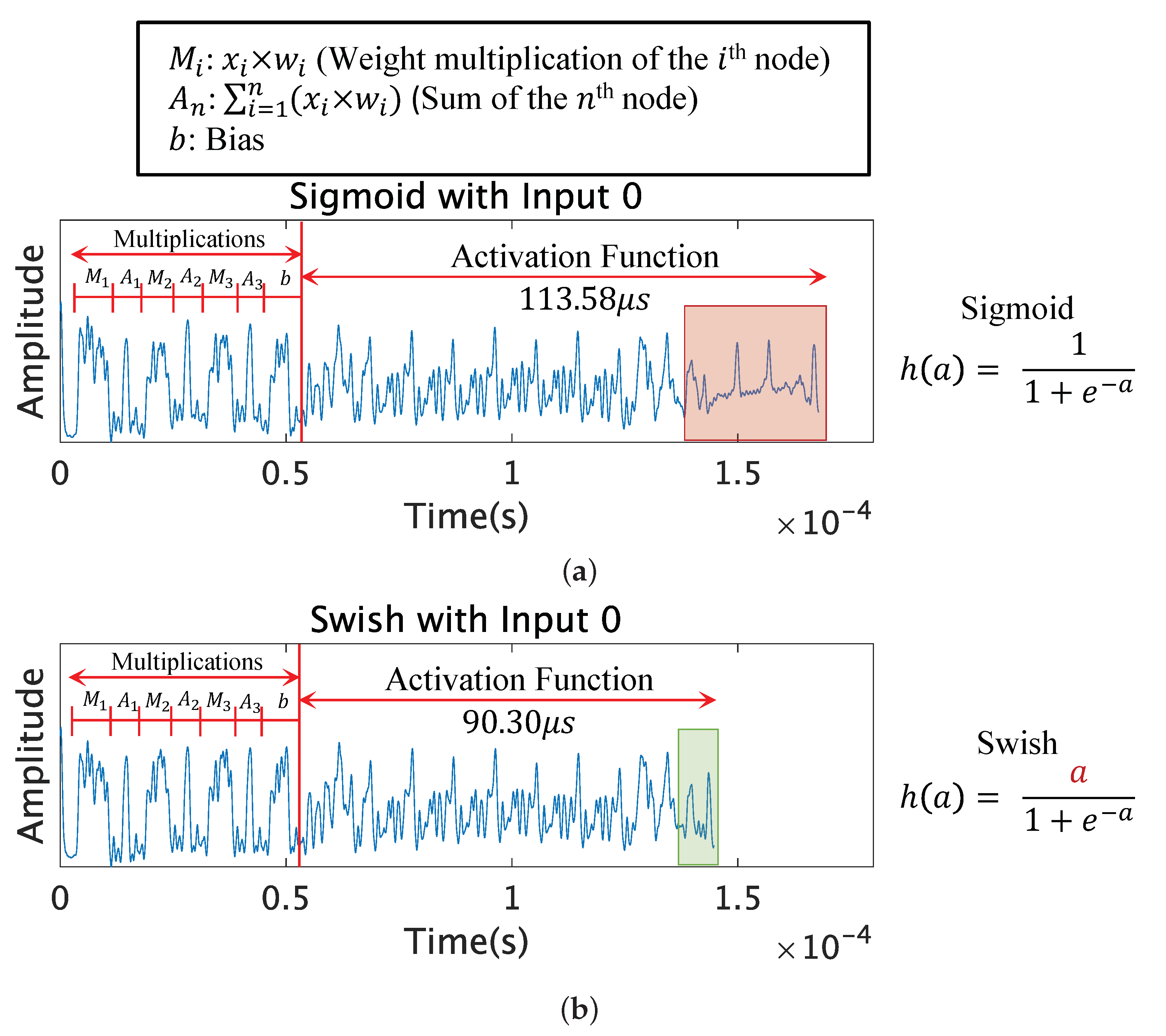
The processed leakage patterns of the Sigmoid and Swish functions with input 0 are shown in
Figure 5. When processing input 0, the Swish function has 0 as the numerator, reducing the time for the division operation compared to the Sigmoid function. The division operation for the Sigmoid function is surrounded in a red box, and the division operation for the Swish function is surrounded in a green box. It can be clearly observed that the Swish function is shorter in computation time and also has fewer peaks compared to the Sigmoid function.
The identification of activation functions by SEMA is mainly performed by observing the differences in peak patterns and the number of peaks. The differences in the shapes of the traces and peaks originates from the variability in the operations of the functions. The operations and peaks of the traces have a relation, allowing SEMA to distinguish the activation functions. The differences in just the value, however, do not cause changes to the peak patterns and number of peaks. The only difference between the Swish and Sigmoid function is just the value of the numerator, which resulted in the same EM trace peak patterns. The same could be said for the peaks for the ReLU function with positive and negative inputs. We believe that the limit of SEMA is that only the operations become visible from the EM trace. Therefore, it is important to observe the timing for when the numerator is 0, because the computation will become much faster.
5.4. ReLU, Leaky ReLU, and SELU
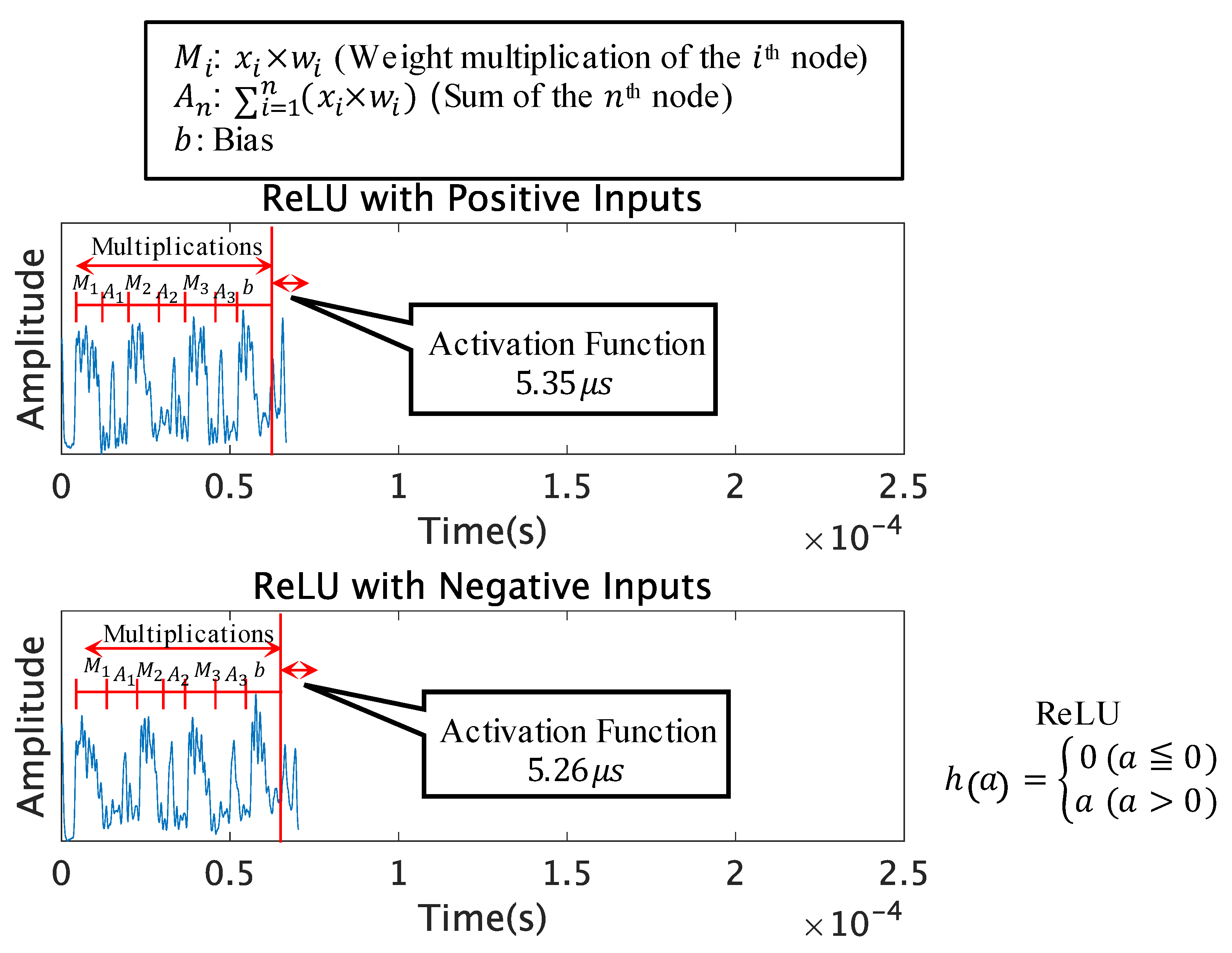
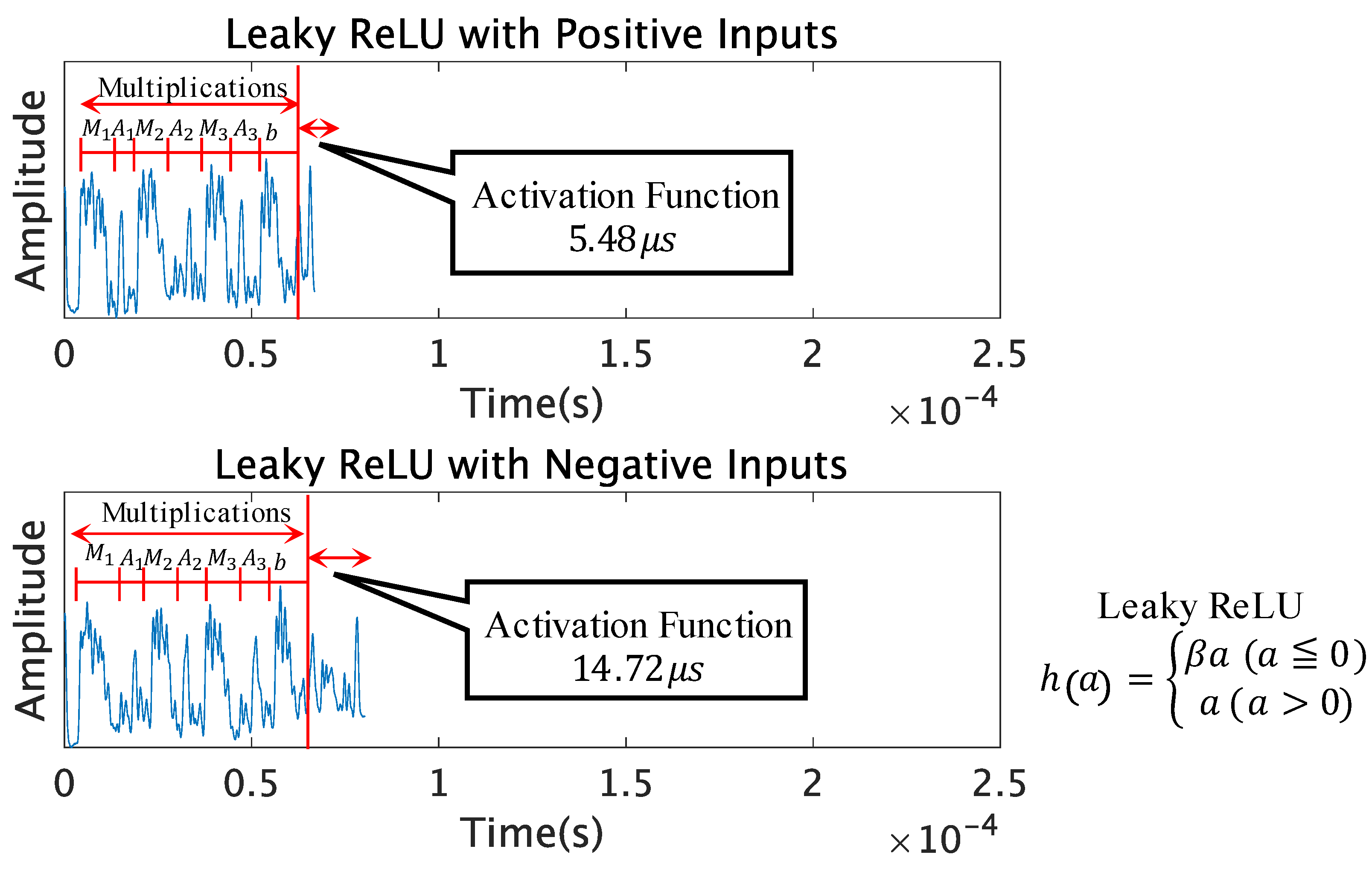
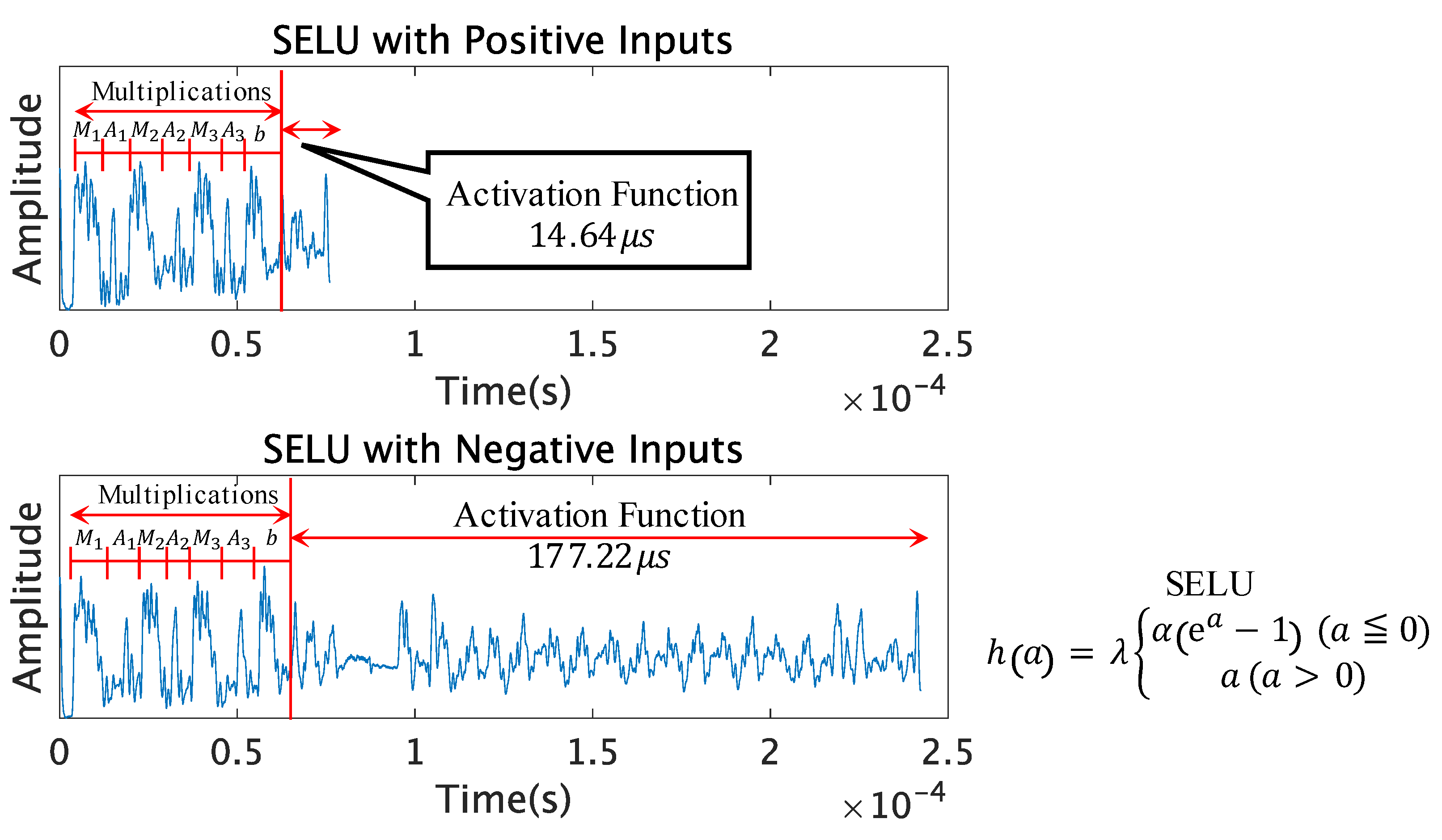
Due to the use of similar activation functions, the functions will become more difficult to distinguish just by the computation time. We decided to observe the Leaky ReLU and SELU functions along with the popular ReLU function, which are extremely similar to the ReLU function in terms of the operations it calculates. The ReLU, Leaky ReLU, and SELU functions have different outputs for positive and negative inputs. Therefore, we measured the traces of these functions with positive and negative inputs, to see if the traces would change for different inputs.
Figure 6,
Figure 7 and
Figure 8 compare the leakage patterns of the ReLU function, Leaky ReLU function, and SELU function with positive and negative inputs. It can be observed from this graph that the ReLU function has the same peak patterns for both positive and negative inputs. However, the patterns differ for the Leaky ReLU function and SELU function.
Table 2 presents the comparison of the peak patterns seen in our setup with limited test trials. The Leaky ReLU function with positive inputs has the same peak patterns as the ReLU function, and the negative inputs have the same peak patterns as the SELU function with positive inputs. The SELU function with negative inputs has a very similar peak pattern to the Tanh function, with slightly different peaks in the latter half of the activation function.
From this, it can be said that these activation functions could be distinguished if the attacker has access to the inputs to measure the traces of the activation functions with positive and negative inputs.
5.5. Softmax and Fast Sigmoid
The softmax function computes the exponential function operation several times; therefore, the pattern of the exponential function will repeat itself for the number of neurons in the output layer as shown in
Figure 9. If the number of neurons in the output layer is
n, the exponential function pattern will repeat itself
n times. This makes the trace longer than the other activation functions.
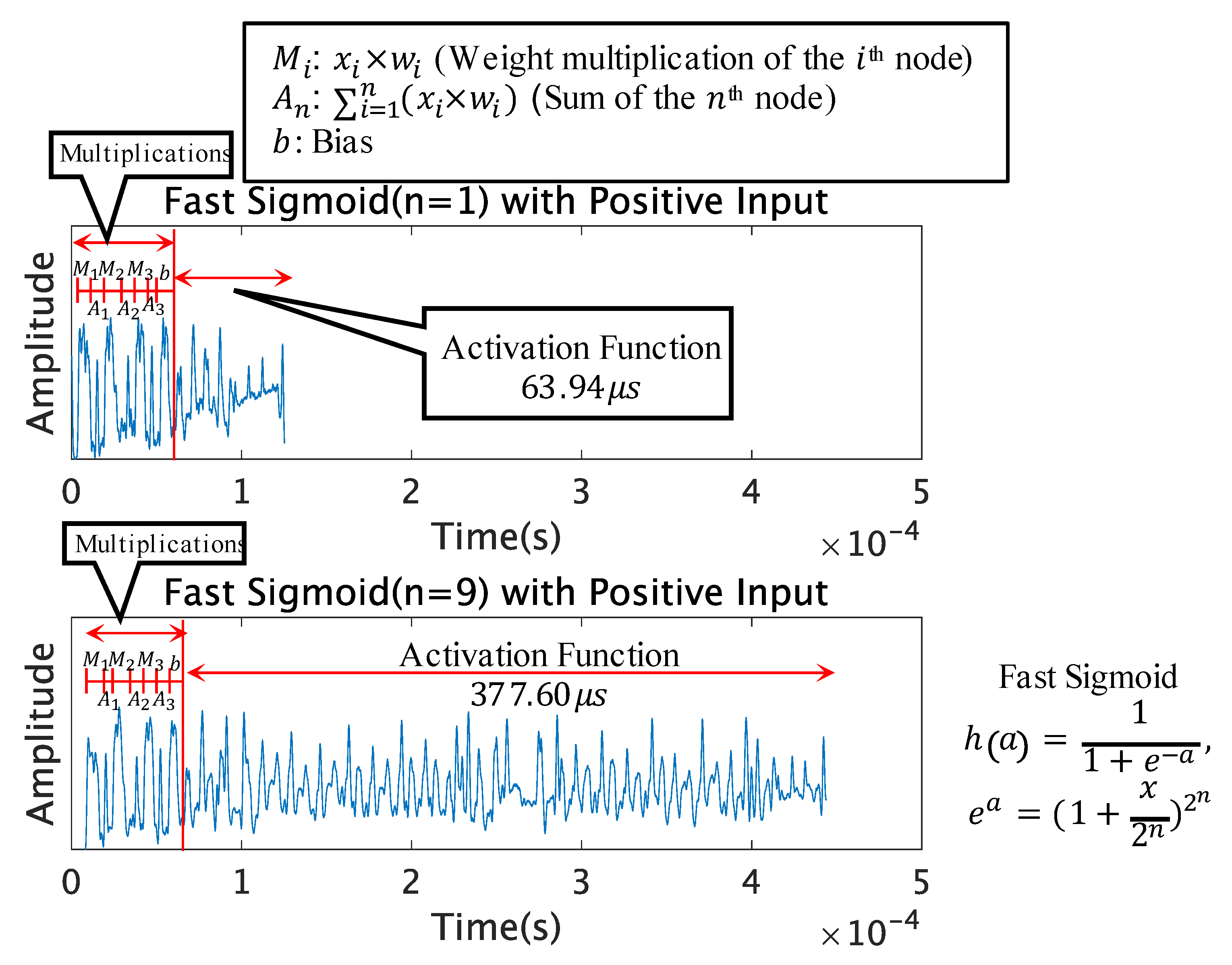
The Fast Sigmoid function includes the exponentiation operation. The approximation of the exponential function has a unique pattern; therefore, it can be easily distinguished from the other functions as shown in
Figure 10. When
from Equation (
9), the peak patterns were very unique and had a shorter computation time than the Sigmoid function. When
from Equation (
9), the peak patterns were also unique, however having a resemblance to the Sigmoid function in the latter half of the activation function.
The softmax function and Fast Sigmoid function both had unique patterns, causing easy identification from pre-characterization of the peak patterns. We also believe that the Fast Sigmoid function has the possibility of being a constant-time implementation of the exponential function. The timing attack has difficulty in distinguishing constant-time activation function, making the potential of SEMA advantageous for the timing attack in our setup.
5.6. Discussion
We were able to distinguish the eight activation functions. We acquired the same peaks for the Sigmoid function, Tanh function, softmax function, and rectified linear unit (ReLU) function as the work by Takatoi et al. [
16]. However, these popular activation functions become very difficult to distinguish with the similar activation functions. The Sigmoid function and Swish function are difficult to distinguish by SEMA except when processing the input 0. The identification by SEMA was performed through observing the differences in peak patterns coming from the variability in the operations of the functions. We believe the operations and peaks of the traces have a relation, allowing SEMA to distinguish the activation functions, but the limit of SEMA is that difference in values will be ignored. From the results, it can be noted that using activation functions with the same operations with different values would be the safest way to make a black box neural network, one example being the Sigmoid function or Swish function.
There are neural networks implemented on different platforms, such as a GPU platform or a FPGA platform. We believe the SEMA-based approach and methodology could be applied to different platforms, such as these similar microcontroller platforms, because side-channel analysis has been demonstrated on these platforms in several previous works [
12,
15,
25]. One work by Chmielewski et al. reverse-engineered neural network designs, such as the number of layers and neurons, as well as types of activation functions on GPUs through SEMA [
26]. When we carefully observe the traces recovered by Chmielewski et al., we can see the difference in peak patterns through different types of activation functions. Though the peaks are not necessarily the exact same as the ones on our microcontroller, by using the same method to extract the peaks and pre-characterize them, we believe the peaks can be used to distinguish activation functions more clearly with reasoning than with just computation time, as done in their work.
The proposed SEMA attack can be combined with the full reverse-engineering of the neural network in [
15]. By making a template and pre-characterizing the operations in the EM trace, activation functions can be distinguished with SEMA. Using the SEMA-based identification to replace the timing-based activation function identification, we believe the reverse-engineering can become a more versatile attack.
6. Related Works
As DNNs are intellectual property, there are many attacks targeting these network models and parameters. DNNs on edge devices especially are quickly becoming a target. There are many model extraction attacks being researched using side-channel attacks. Some of the previous works were focused on an NN embedded on an FPGA accelerator. Dubey et al. used power analysis to extract weights and bias from the adder-tree function of the binarized neural network (BNN) hardware by focusing on the switching activity of registers [
27]. Yu et al. used EM side-channel information leakages to accurately recover the large-scale BNN accelerators embedded on an FPGA [
11]. This study is based on a black box setting, but can only collect EM side-channel information under inference operations and observe the networks’ outputs. They recovered the architecture of a targeted BNN through the analysis of EM emanations from the data bus and built substitute models with both a classification performance and layout architecture similar to the victim BNNs on the same hardware platforms using such information. Regazzoni et al. targeted a practical BNN hardware and showed that the overall structure of the BNN can be identified by the corresponding EM emanations [
28]. In addition, they targeted the convolution layers. With actual experiments, the weight values convolved in the layers were revealed by EM side-channel attacks. There are also works around GPUs. Hu et al. used EM emanations to recover the architecture in a black box setting, but requiring physical access to the system [
29]. Their objective was to learn the relation between extracted architectural hints such as the volumes of memory reads/writes obtained by side-channel and model internal architectures, and the results showed that a high accuracy of model extraction could be achieved. There are also works on VGG architectures. The black box NN extraction attack was presented by recovering the layer’s depth through exploiting timing side-channel information [
30]. Duddu et al. [
30] utilized a reinforcement-learning-based neural architecture search to search for the optimal substitute model with functionality and test accuracy similar to the victim networks.
Maji et al. demonstrated that even simple power and timing analysis enable recovering an embedded neural network model with different precision on three microcontroller platforms [
31]. They used the same microcontroller platform Atmel ATmega328P; however, they did not distinguish activation functions like in our work. Wang et al. demonstrated that one can utilize the cache-based SCA of Flush+Reload to spy on DNN models’ computations and recover the label information [
32].
There also exists side-channel analysis, which targets the parameters of the NN model, one of the parameters being activation functions. Batina et al. showed that NNs implemented on CPUs can be fully reverse-engineered using merely side-channel leakages in a black box setting [
15]. In [
15], the activation function was discerned by the timing attack from its distinctive computation time with multiple executions and inputs. Chmielewski et al. reverse-engineered neural network designs, such as the number of layers and neurons, as well as the types of activation functions on GPUs through SEMA [
26]. In [
26], the activation function was discerned by the timing observed from a singular execution of SEMA. Takatoi et al. identified activation functions using SEMA [
16]. In [
16], the activation function was discerned by observing the timing and unique patterns from a singular execution of SEMA. In [
15,
16,
26], the activation functions distinguished were the Sigmoid function, Tanh function, softmax function, and ReLU function. In this work, we additionally distinguished similar activation functions, the Leaky ReLU function, SELU function, Swish function, and Fast Sigmoid function. These additional activation functions have not yet been distinguished to the best of our knowledge. In our work, up to three inputs and executions were necessary depending on the computation time of the activation function acquired.
As for the countermeasures, in [
33], Maji et al. demonstrated a neural network accelerator that uses a threshold implementation to protect the model parameters and input from the power-based side-channel attacks.
7. Conclusions
In this work, we replicated the timing attack in the previous work by Batina et al. [
15] and used it on various similar activation functions. The timing attack had a weakness towards various implementation methods of activation functions. Therefore, we improved an alternative method to recover similar activation functions using SEMA. We investigated the SEMA attack and its limits to distinguish activation functions from a black box neural network using side-channel information. The identification by SEMA was performed through observing the differences in peak patterns coming from the variability in the operations of the functions. We believe the operations and peaks of the traces have a relation, allowing SEMA to distinguish the activation functions, but the limit of SEMA is that a difference in values will be ignored. However, by having access to the inputs, we were able to identify all eight similar activation functions in our work. We showed that the potential of the SEMA attack is advantageous for the timing attack, as the operations of the activation functions can be depicted from the EM traces. This attack shows the vulnerabilities of edge AI to side-channel attacks and the need for neural networks on edge devices to implement effective countermeasures against side-channel attacks to strengthen the security of these embedded devices.
Finally, we have suggestions on countermeasures to mitigate these threats. The countermeasure listed in this article is to use activation functions with differences in only the values. There is also a method to use a memory-based implementation of the activation function, used often in side-channel countermeasures. We believe that the lookup table is a good way to implement activation functions. Although there is a trade-off of accuracy, we believe it to be an efficient way to counter both timing and SEMA attacks, as the lookup table can be constant-time and have no difference in operations.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}