
Three-Dimensional Processing of Reflections for Passive-Source Seismology Based on Geometric Design



Abstract
:1. Introduction
2. Extracting 3D Virtual Shot Records Based on Geometry
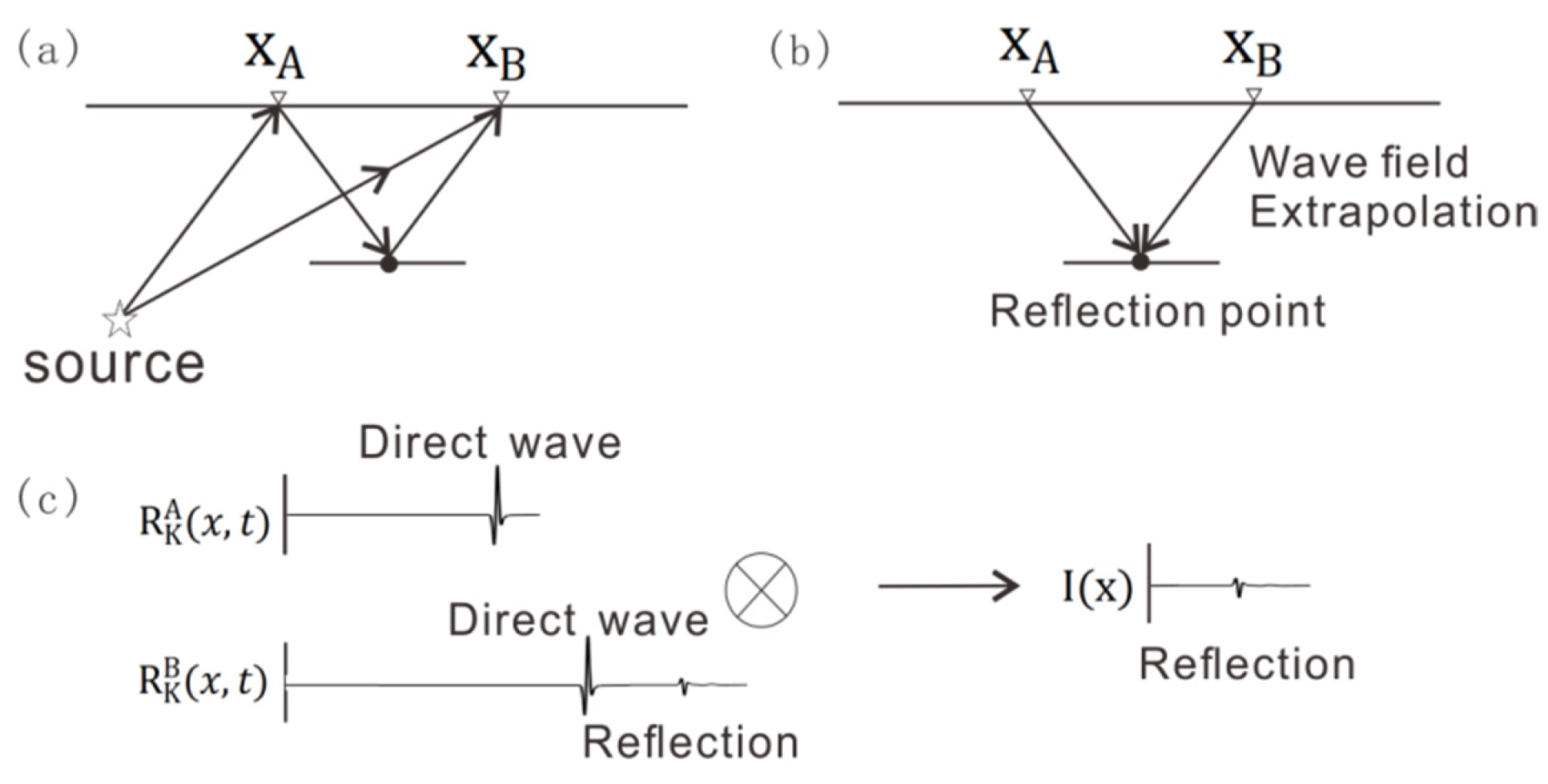
2.1. Principle of Reflection of Waves from Passive Sources
2.2. Calculating 3D Virtual Shot Records of Passive Source Based on Geometry
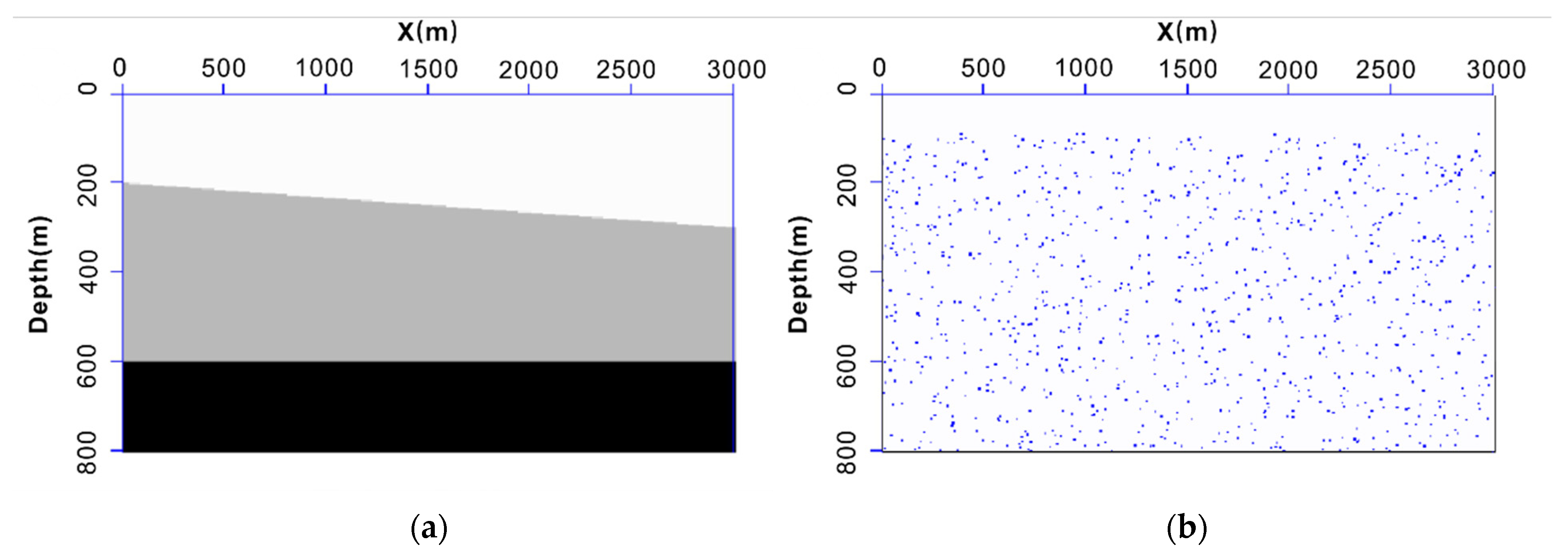
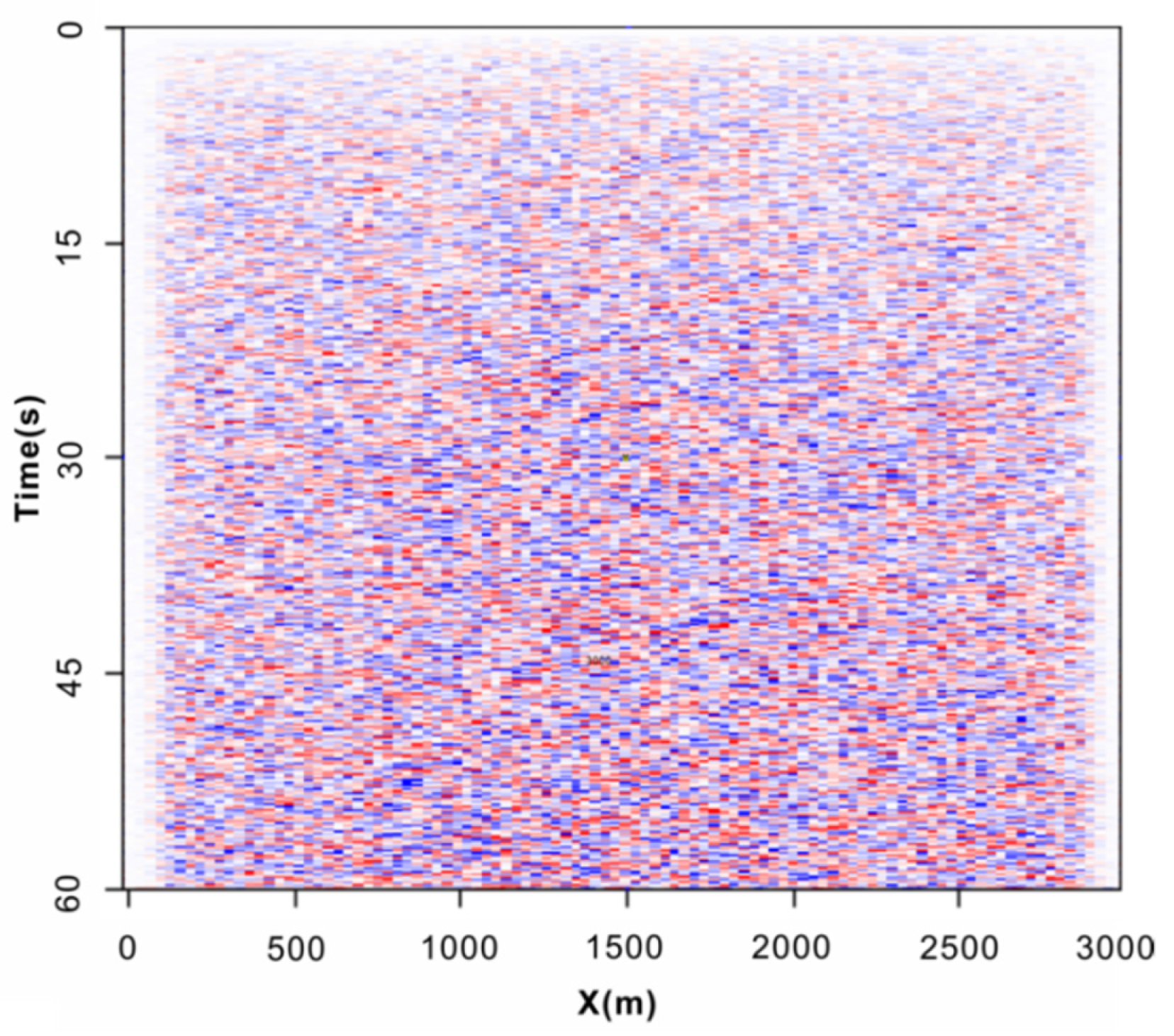
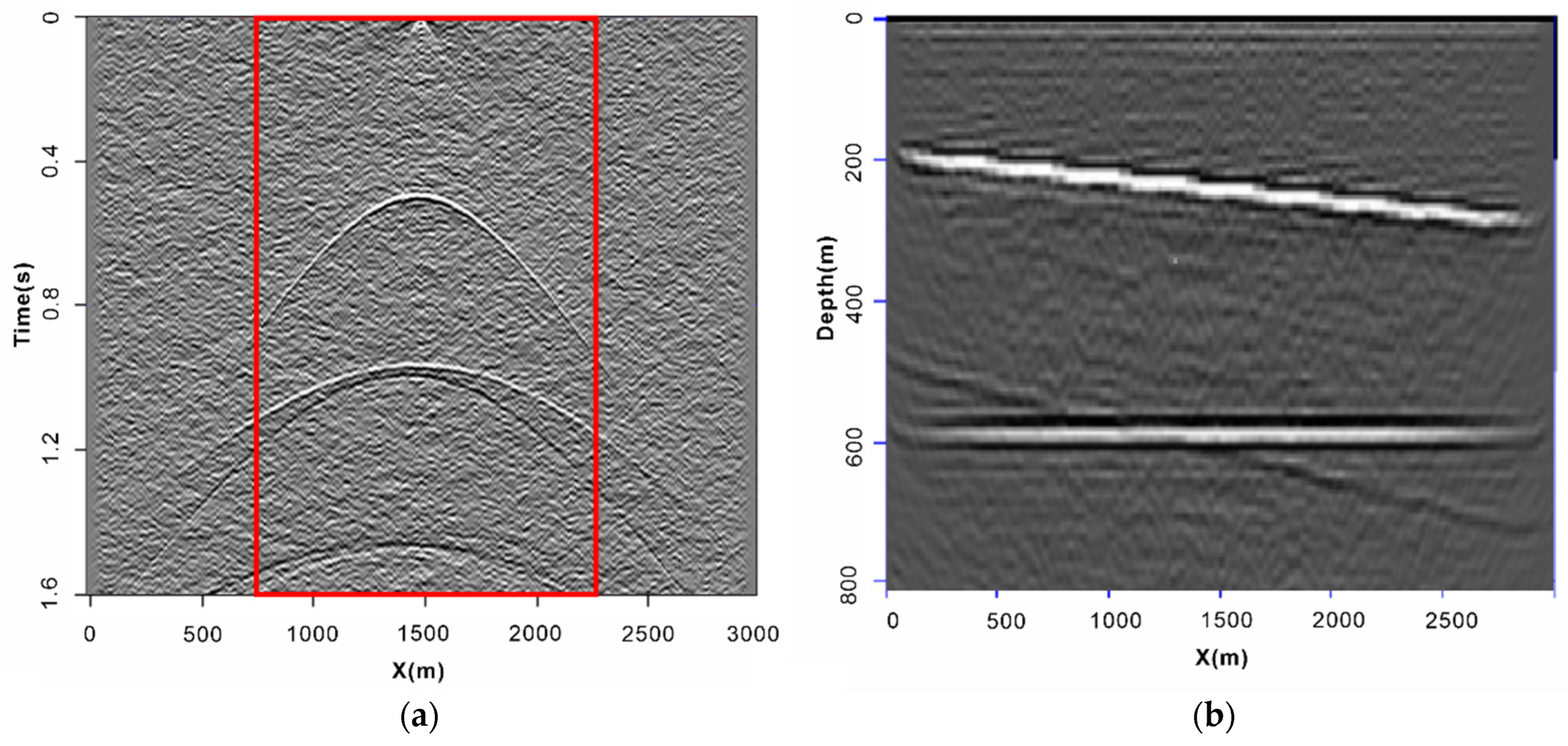
2.3. Model Test
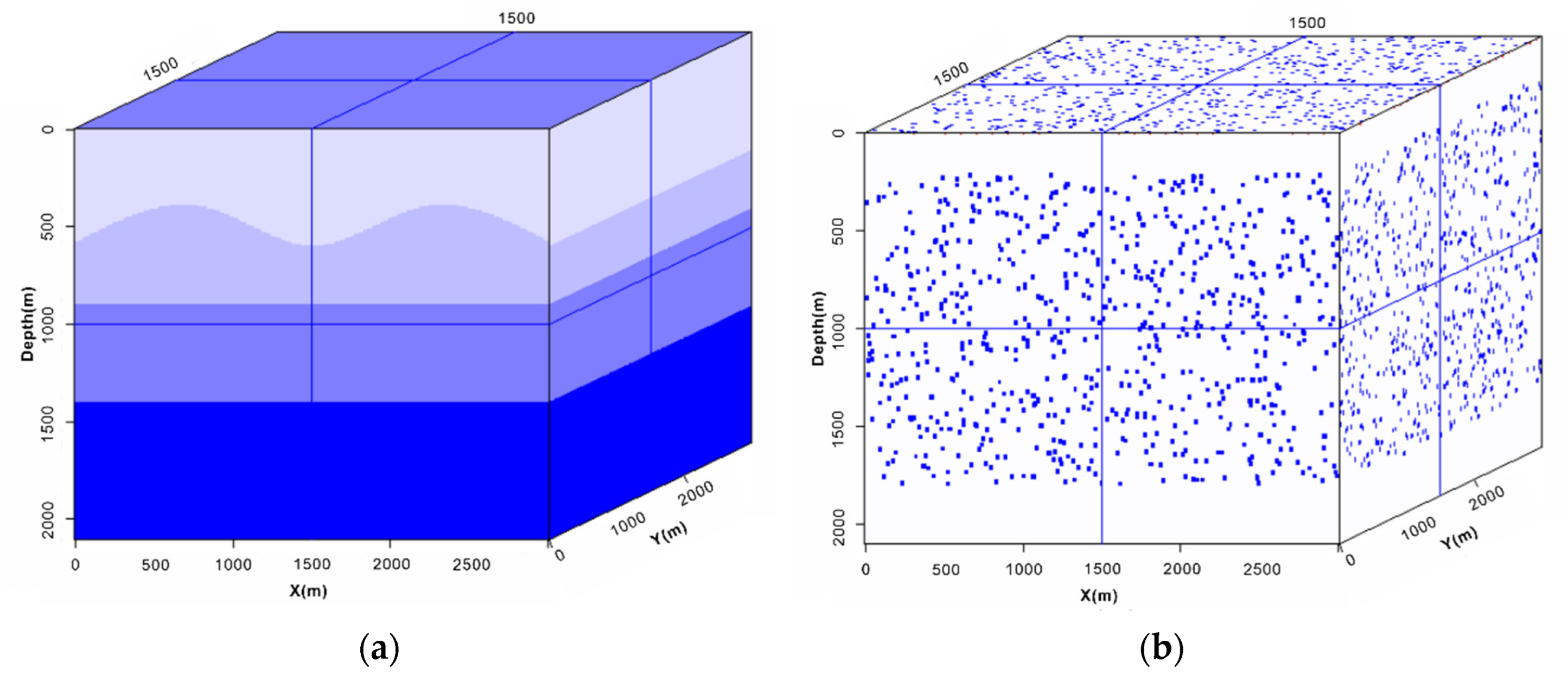
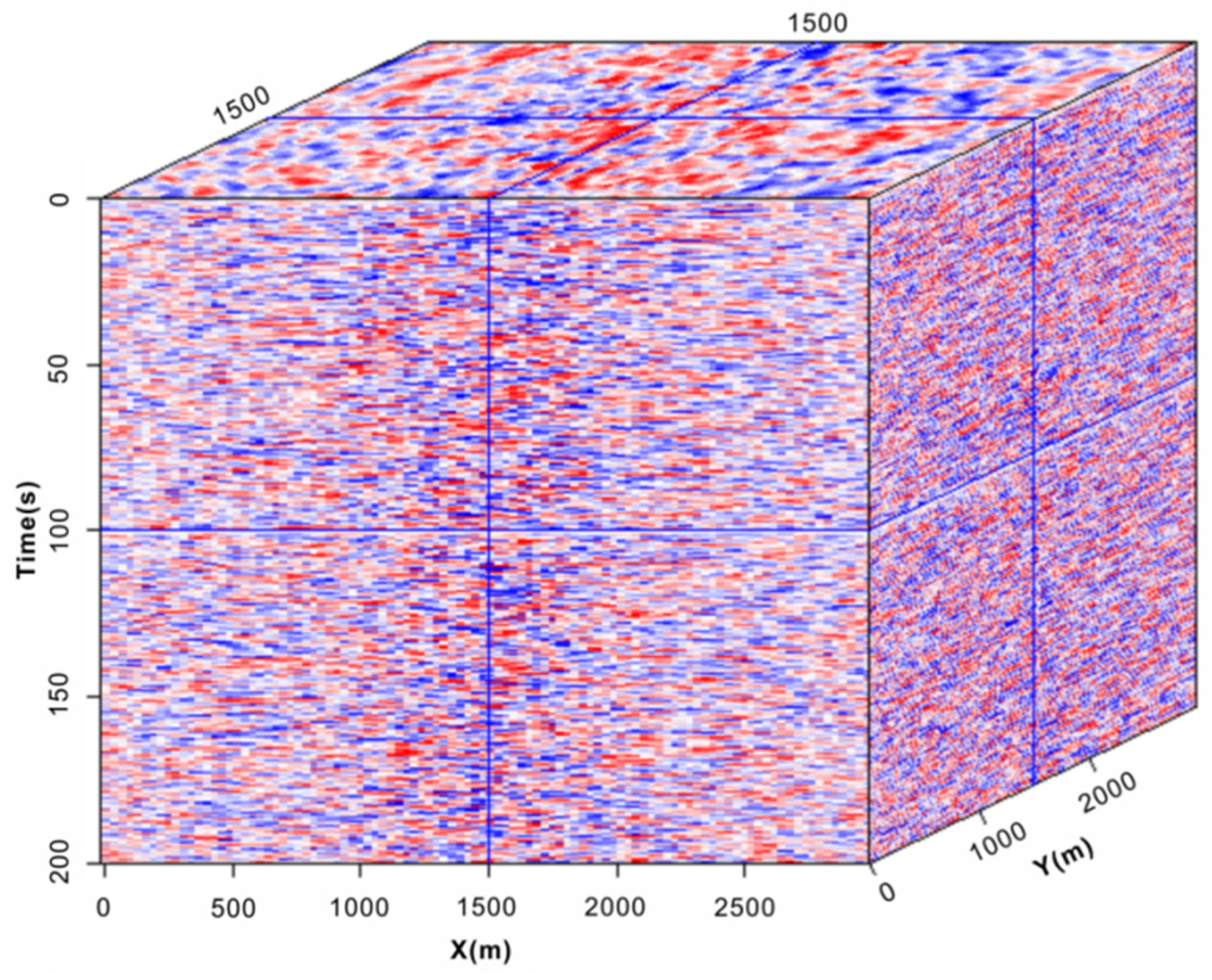
2.3.1. Conventional Forward Model
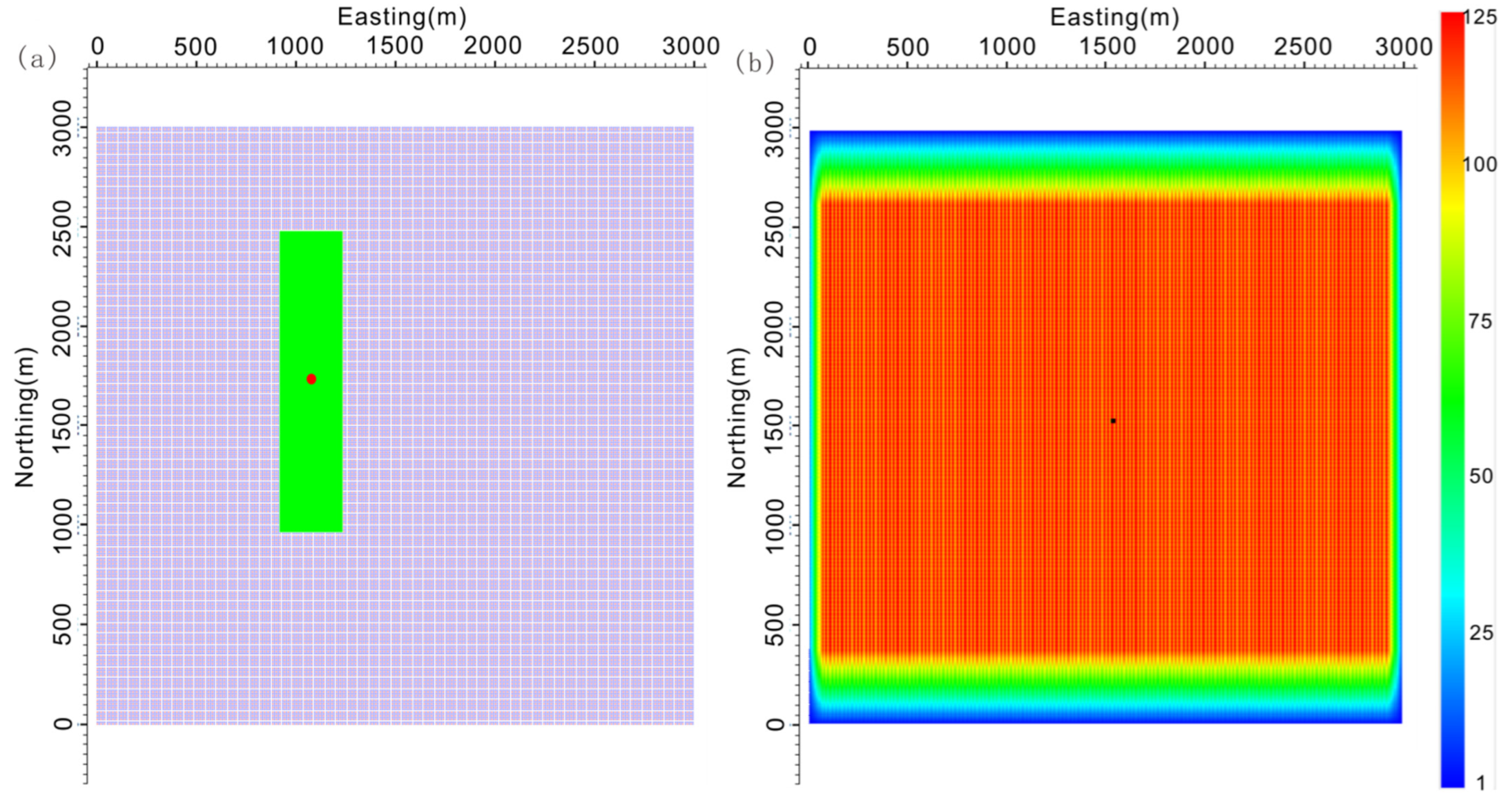
2.3.2. Forward Model with a Narrow Azimuth
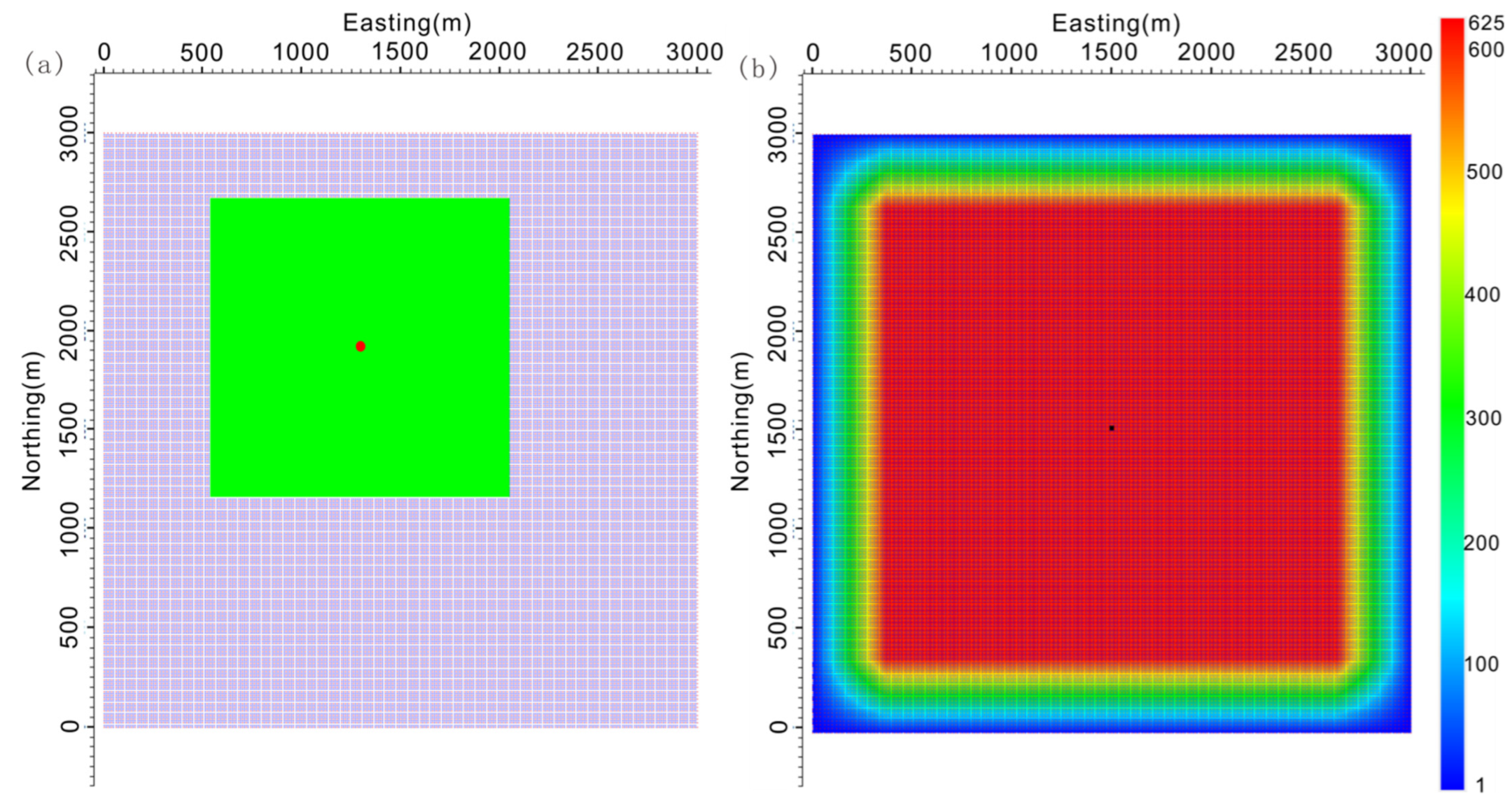
2.3.3. Forward Model with a Wide Azimuth
3. Direct Migration of Reflections of 3D Waves from Passive Source Based on Geometry
3.1. Principle of Calculation of Direct Migration
3.2. Calculation of 3D Reflections from a Passive Source Using Direct Migration Based on Geometry
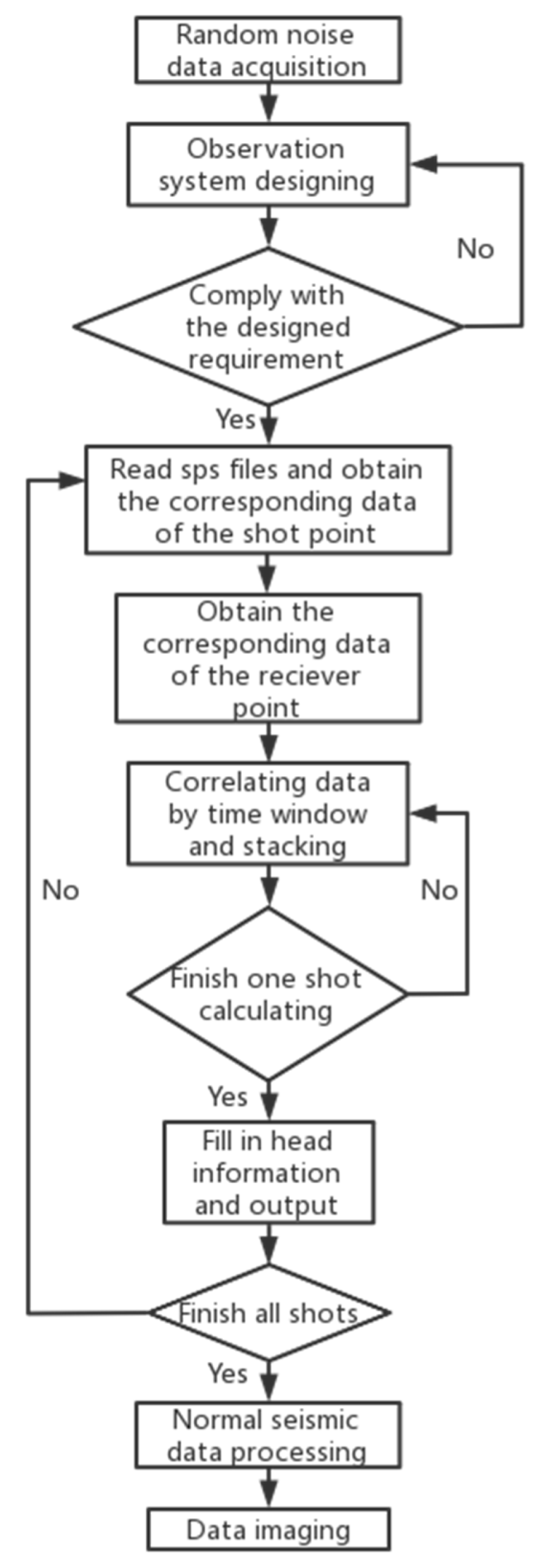
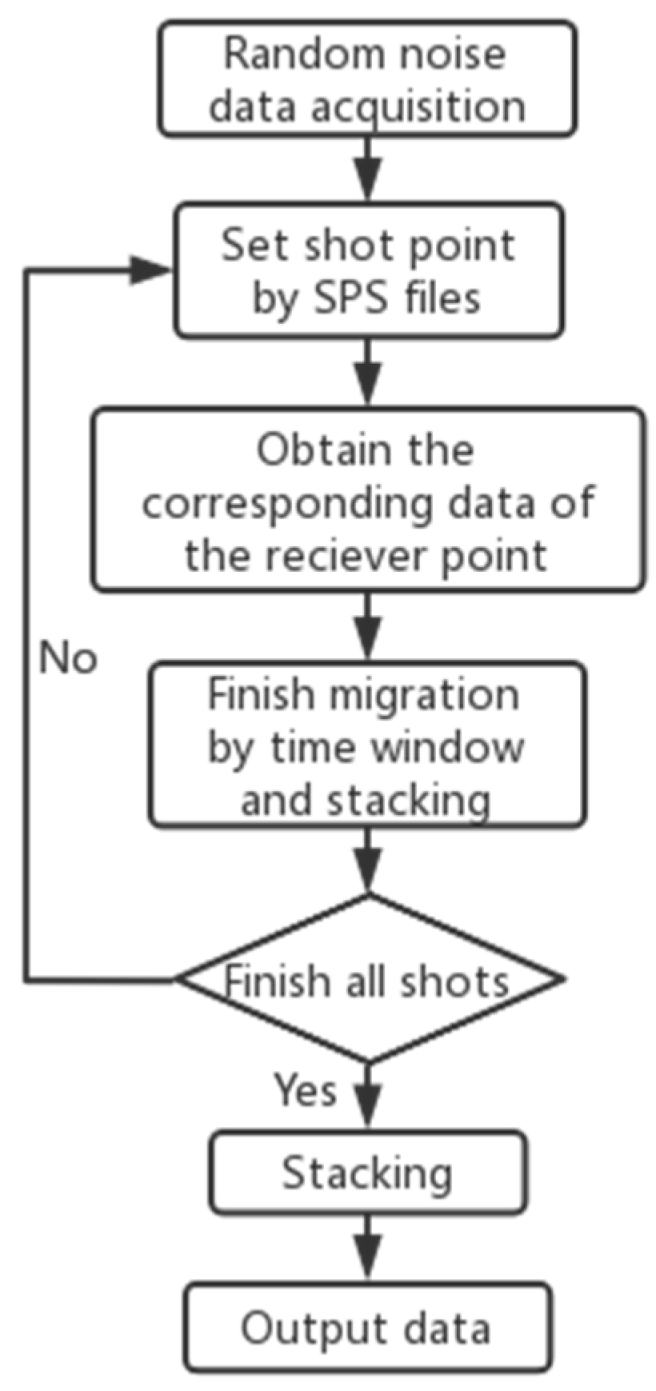
- Having collected random noise records from the field, the geometry that satisfies the given requirements is designed by using a design software according to the known surface and information on the underground structure as well as the geological targets, and is stored in the SPS file.
- A random noise record is set at a specified location as the noise record of the source point according to the content of the SPS.S file. The range of the corresponding receiver point is obtained from the SPS.X file according to the source point. The noise records of all receiver points are read, the one-way wave offset is calculated, stacking according to the time window is performed, and the information stored in the SPS.S file and SPS.R files is inserted into the header.
- All of the results of the migration of virtual shot records are calculated, and the imaging section is obtained after processing the stack.
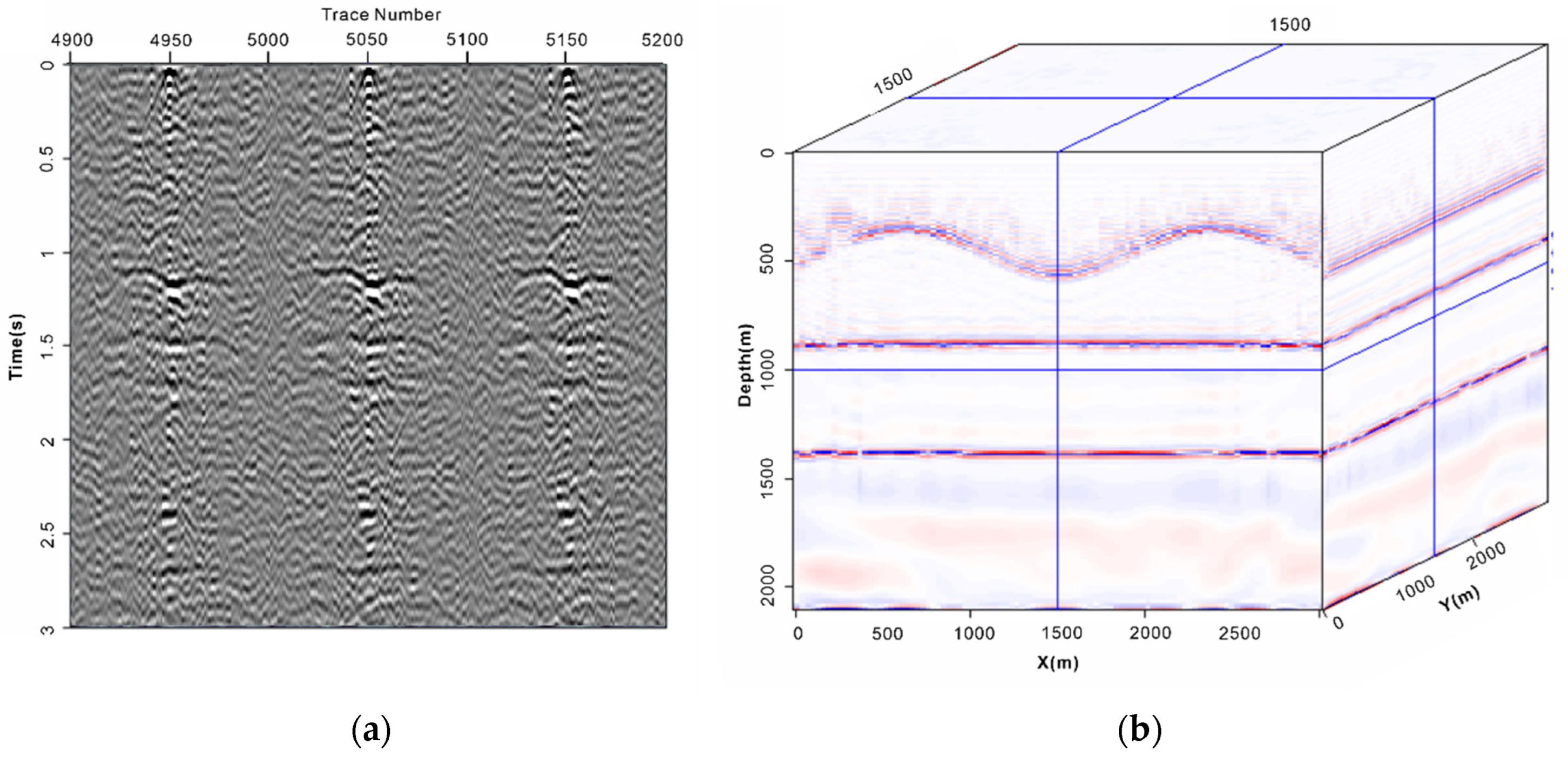
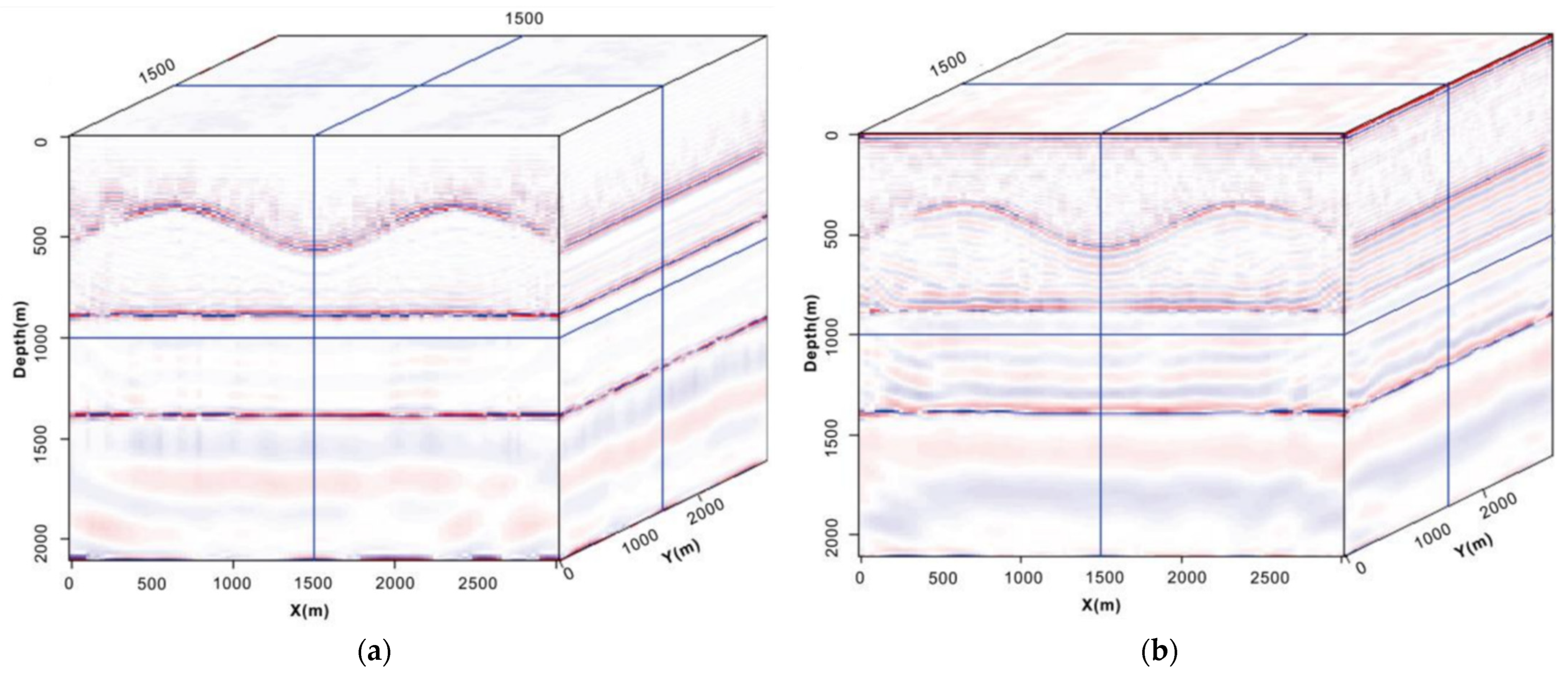
3.3. Testing the Model of Direct Migration
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Schuster, G.T. Theory of daylight/ interferometric imaging: Tutorial. In Proceedings of the 63rd EAGE Conference & Exhibition, Amsterdam, The Netherlands, 11–15 June 2001; p. A32, Extended Abstracts. [Google Scholar]
- Bakulin, A.; Calvert, R. Virtual source: New method for imaging and 4D below complex overburden. In Proceedings of the 74th Annual International Meeting, SEG, Denver, Colorado, 10–15 October 2004; pp. 2477–2480, Expanded Abstracts. [Google Scholar]
- Claerbout, J.F. Synthesis of a layered medium from its acoustic transmission response. Geophysics 1968, 33, 264–269. [Google Scholar] [CrossRef]
- Rickett, J.; Claerbout, J. Acoustic daylight imaging via spectral factorization: Helioseismology and reservoir monitoring. Lead. Edge 1999, 18, 957–960. [Google Scholar] [CrossRef]
- Campillo, M.; Paul, A. Long-range correlations in the diffuse seismic coda. Science 2003, 299, 547–549. [Google Scholar] [CrossRef] [PubMed]
- Shapiro, N.M.; Campillo, M. Emergence of broadband Rayleigh waves from correlations of the ambient seismic noise. Geophys. Res. Lett. 2004, 31, L07614-1–L07614-4. [Google Scholar] [CrossRef]
- Sabra, K.G.; Gerstoft, P.; Roux, P.; Kuperman, W.A.; Fehler, M.C. Extracting time-domain Green’s function estimates from ambient seismic noise. Geophys. Res. Lett. 2005, 32, L03310-1–L03310-5. [Google Scholar] [CrossRef]
- Scherbaum, F. Seismic imaging of the site response using microearthquake recordings. Part I. Method. Bull. Seismol. Soc. Ofamerica 1987, 77, 1905–1923. [Google Scholar] [CrossRef]
- Scherbaum, F. Seismic imaging of the site response using microearthquake recordings. Part II. Application to the Swabian Jura, southwest Germany, seismic network. Bull. Seismol. Soc. Am. 1987, 77, 1924–1944. [Google Scholar] [CrossRef]
- Draganov, D.; Wapenaar, K.; Mulder, W.; Singer, J.; Verdel, A. Retrieval of reflections from seismic background-noise measurements. Geophys. Res. Lett. 2007, 34, L04305. [Google Scholar] [CrossRef]
- Draganov, D.; Campman, X.; Thorbecke, J.; Verdel, A.; Wapenaar, K. Reflection images from ambient seismic noise. Geophysics 2009, 74, A63–A67. [Google Scholar] [CrossRef]
- Draganov, D.; Campman, X.; Thorbecke, J. Seismic exploration-scale velocities and structure from ambient seismic noise (>1 Hz). J. geophys. Res. 2013, 118, 4345–4360. [Google Scholar] [CrossRef]
- Vidal, C.A.; Draganov, D.; Van der Neut, J.; Drijkoningen, G.; Wapenaar, K. Retrieval of reflections from ambient noise using illumination diagnosis. Geophys. J. Int. 2014, 198, 1572–1584. [Google Scholar] [CrossRef]
- Chamarczuk, M.; Malinowski, M.; Draganov, D. 2D body-wave seismic interferometry as a tool for reconnaissance studies and optimization of passive reflection seismic surveys in hardrock environments. J. Appl. Geophys. 2021, 187, 104288. [Google Scholar] [CrossRef]
- Larose, E.; Derode, A.; Campillo, M. Imaging from one-bit correlations of wide band diffuse wave fields. J. Appl. Phys. 2004, 95, 8393–8399. [Google Scholar] [CrossRef]
- Roux, P.; Sabra, K.G.; Gerstoft, P.; Kuperman, W.A.; Fehler, M.C. P-wavesfrom cross-correlation of seismic noise. Geophys. Res. 2005, 32, L19303. [Google Scholar]
- Landès, M.; Hubans, F.; Shapiro, N.M.; Paul, A.; Campillo, M. Origin of deep ocean microseisms by using teleseismic body waves. J. Geophys. Res. 2010, 115, B05302. [Google Scholar] [CrossRef]
- Ruigrok, E.; Campman, X.; Draganov, D.; Wapenaar, K. High-resolution lithospheric imaging with seismic interferometry. Geophys. J. Int. 2010, 183, 339–357. [Google Scholar] [CrossRef]
- Girard, A.J.; Shragge, J. Automated processing strategies for ambient seismic data. Geophys. Prospect. 2020, 68, 293–312. [Google Scholar] [CrossRef]
- Miyazawa, M.; Snieder, R.; Venkataraman, A. Application of seismic interferometry to extract P- and S-wave propagation and observation of shear-wave splitting from noise data at Cold Lake, Alberta, Canada. Geophysics 2008, 73, 35. [Google Scholar] [CrossRef]
- Cheraghi, S.; Craven, J.A.; Bellefleur, G. Feasibility of virtual source reflection seismology using interferometry for mineral exploration: A test study in the Lalor Lake VMS mining area, Manitoba, Canada. Geophys. Prospect. 2015, 63, 833–848. [Google Scholar] [CrossRef]
- Cheraghi, S.; White, D.J.; Draganov, D.; Bellefleur, G.; Craven, J.A.; Roberts, B. Passsive seismic reflection interferometry:A case study from the Aquistore CO2 storage site, Saskatchewan, Canada. Geophysics 2017, 82, B79–B93. [Google Scholar] [CrossRef]
- Roots, E.; Calvert, A.J.; Craven, J. Interferometric seismic imaging around the active Lalor mine in the Flin Flon greenstone belt, Canada. Tectonophysics 2017, 718, 92–104. [Google Scholar] [CrossRef]
- Brenguier, F.; Boué, P.; Ben-Zion, Y.; Vernon, F.; Johnson, C.W.; Mordret, A.; Coutant, O.; Share, P.E.; Beaucé, E.; Hollis, D.; et al. Train traffic as a powerful noise source for monitoring active faults with seismic interferometry. Geophys. Res. Lett. 2019, 46, 9529–9536. [Google Scholar] [CrossRef] [PubMed]
- Brenguier, F.; Courbis, R.; Mordret, A.; Campman, X.; Boué, P.; Chmiel, M.; Takano, T.; Lecocq, T.; Van Der Veen, W.; Postif, S.; et al. Noise-based ballistic wave passive seismic monitoring. Part 1: Body-waves. Geophys. J. Int. 2020, 221, 683–691. [Google Scholar] [CrossRef]
- Nakata, N.; Chang, J.P.; Lawrence, J.F.; Boué, P. Body wave extraction and tomography at Long Beach, California, with ambient-noise interferometry. J. Geophys. Res. Solid Earth 2015, 120, 1159–1173. [Google Scholar] [CrossRef]
- Chamarczuk, M.; Draganov, D.; Malinowski, M.; Koivisto, E.; Heinonen, S.; Rötsä, S. Reflection Image Beyond the Known Extent of the Prospective Zone Provided by 3D Virtual-Source Methodology. In Proceedings of the 83rd EAGE Annual Conference & Exhibition, Madrid, Spain, 6–9 June 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Artman, B. Imaging passive seismic data. Geophysics 2006, 71, SI177–SI187. [Google Scholar] [CrossRef]
- Girard, A.J.; Shragge, J. Direct migration of ambient seismic data. Geophys. Prospect. 2020, 68, 270–292. [Google Scholar] [CrossRef]
- Shiraishi, K.; Watanabe, T. Passive seismic reflection imaging based on acoustic and elastic reverse time migration without source information: Theory and numerical simulations. theory and numerical simulations. Explor. Geophys. 2022, 53, 198–210. [Google Scholar] [CrossRef]
- Wapenaar, K.; Draganov, D.; Snieder, R.; Campman, X.; Verdel, A. Tutorial on seismic interferometry: Part 1—Basic principles and applications. Geophysics 2010, 75, 75A195–75A209. [Google Scholar] [CrossRef]
- Wapenaar, K.; Slob, E.; Snieder, R.; Curtis, A. Tutorial on seismic interferometry: Part 2—Underlying theory and new advances. Geophysics 2010, 75, A211–A275. [Google Scholar] [CrossRef]
- Liu, G.-F.; Meng, X.-H.; Liu, H. Accelerating finite difference wavefi eld-continuation depth migration by GPU. Appl. Geophys. 2012, 9, 41–48. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Line | Point | Easting | Northing | Elevation |
|---|---|---|---|---|---|
| Byte range | 2–11 | 12–21 | 30–37 | 47–55 | 66–71 |
| Number of bytes | 10 | 10 | 8 | 8 | 6 |
| Parameter | Line | Point | Easting | Northing | Elevation |
|---|---|---|---|---|---|
| Byte range | 2–11 | 12–21 | 30–37 | 47–55 | 66–71 |
| Number of bytes | 10 | 10 | 8 | 8 | 6 |
| Parameter | Field File Number | Source Line | Source Point | From | To | Receiver Line | From | To |
|---|---|---|---|---|---|---|---|---|
| Byte range | 8–15 | 18–27 | 28–37 | 39–43 | 44–48 | 50–59 | 60–69 | 70–79 |
| Number of bytes | 8 | 10 | 10 | 4 | 5 | 10 | 10 | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Liu, G. Three-Dimensional Processing of Reflections for Passive-Source Seismology Based on Geometric Design. Appl. Sci. 2023, 13, 6126. https://doi.org/10.3390/app13106126
Liu Y, Liu G. Three-Dimensional Processing of Reflections for Passive-Source Seismology Based on Geometric Design. Applied Sciences. 2023; 13(10):6126. https://doi.org/10.3390/app13106126
Chicago/Turabian StyleLiu, Yu, and Guofeng Liu. 2023. "Three-Dimensional Processing of Reflections for Passive-Source Seismology Based on Geometric Design" Applied Sciences 13, no. 10: 6126. https://doi.org/10.3390/app13106126
APA StyleLiu, Y., & Liu, G. (2023). Three-Dimensional Processing of Reflections for Passive-Source Seismology Based on Geometric Design. Applied Sciences, 13(10), 6126. https://doi.org/10.3390/app13106126