
Estimation of Relative Acoustic Impedance Perturbation from Reverse Time Migration Using a Modified Inverse Scattering Imaging Condition


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
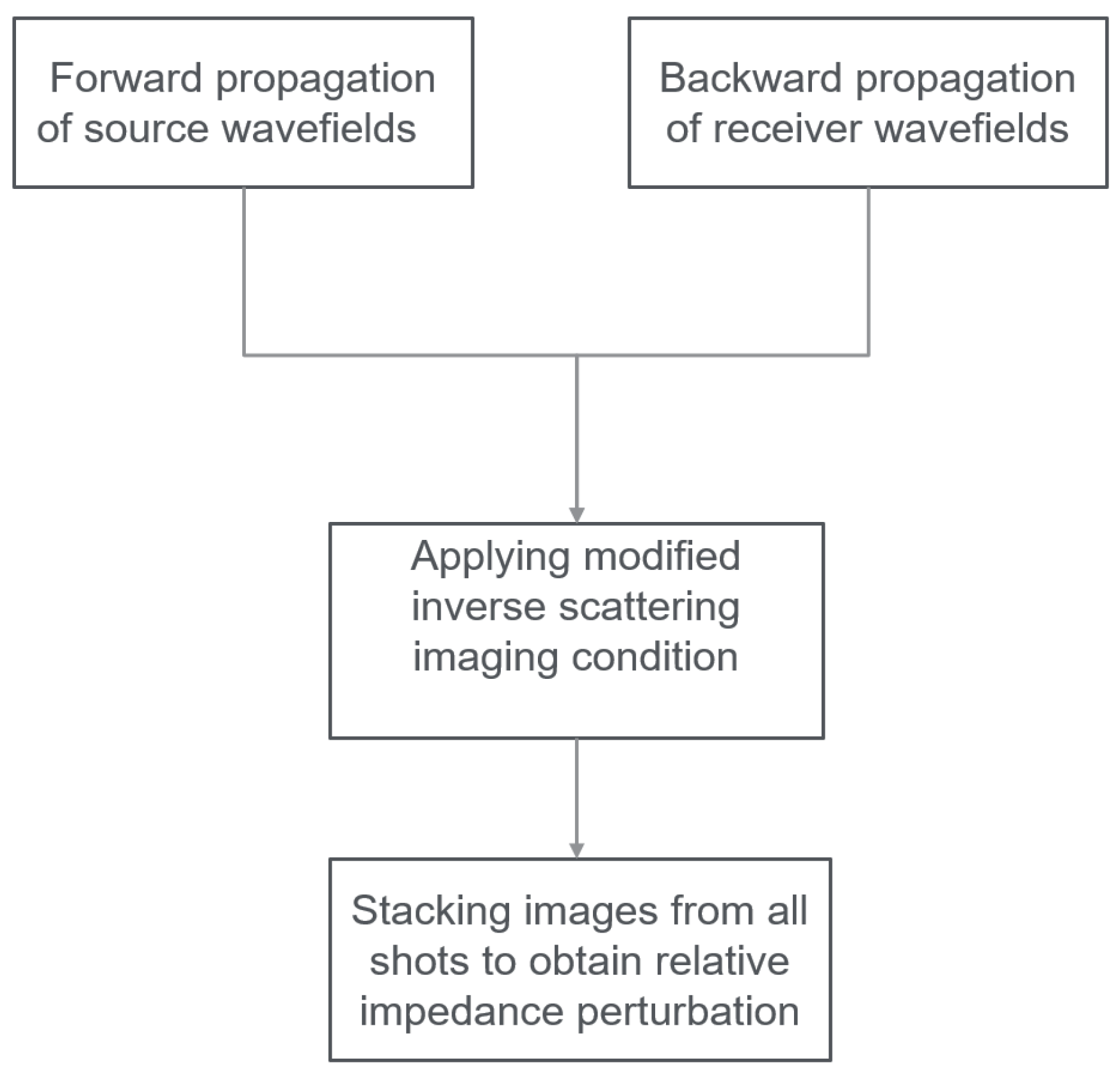
2. Relative Impedance Perturbation Estimation from RTM Using a Modified Inverse Scattering Imaging Condition
2.1. Theory and Algorithm
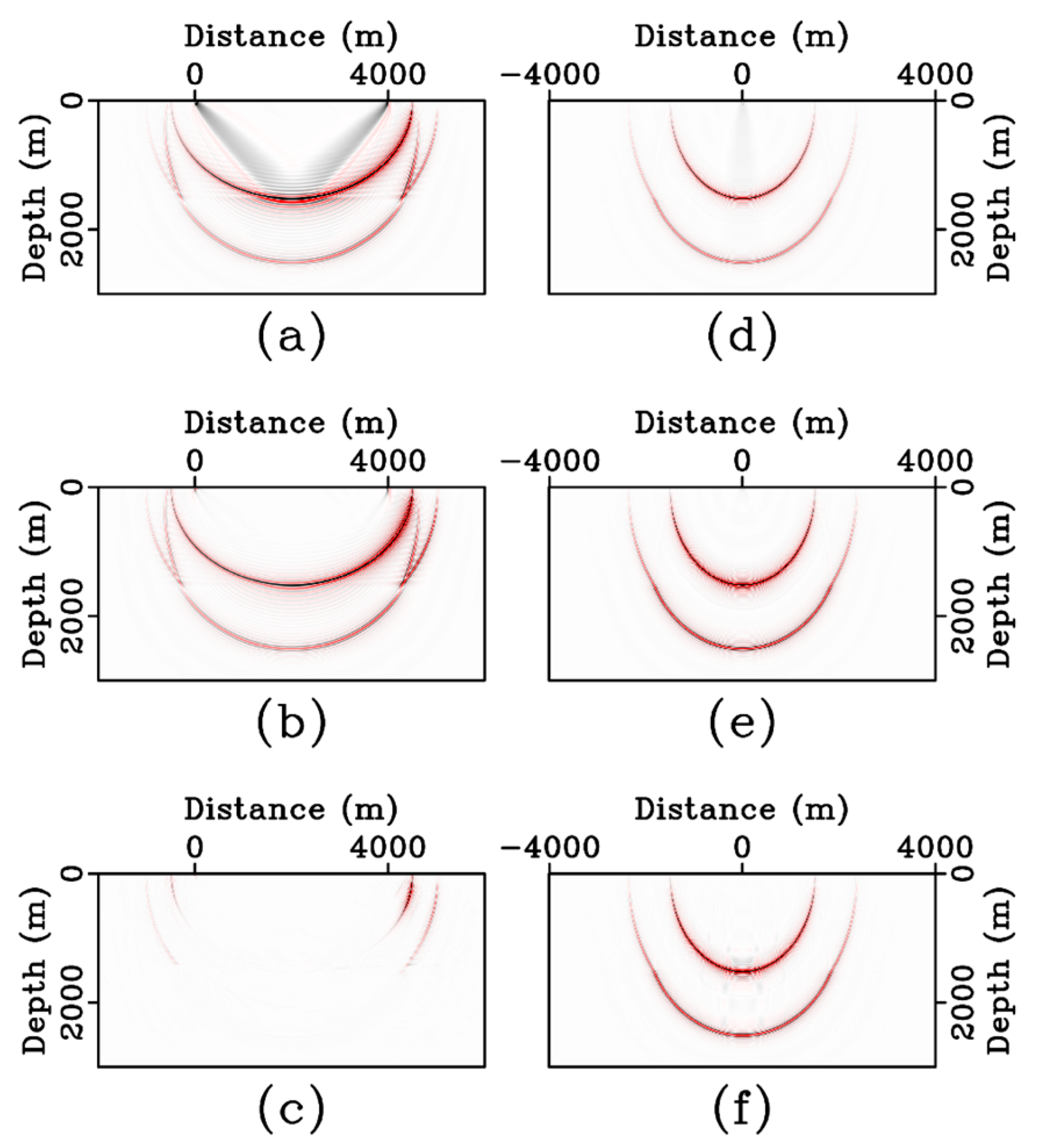
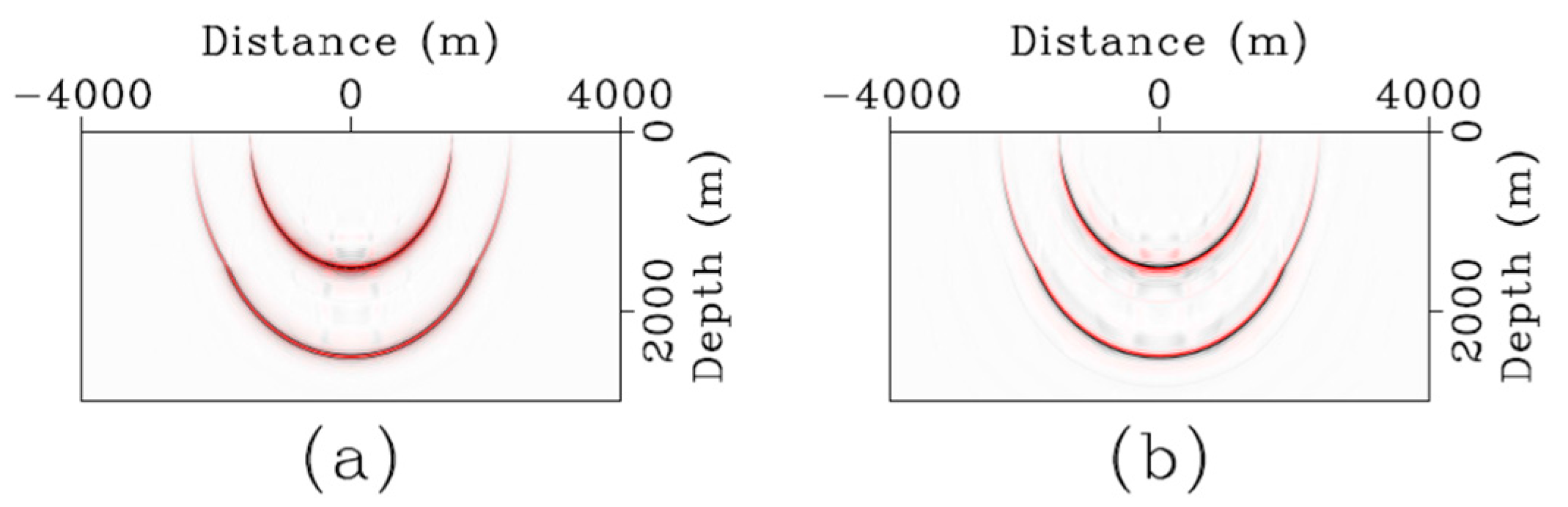
2.2. Comparison of Imaging Conditions
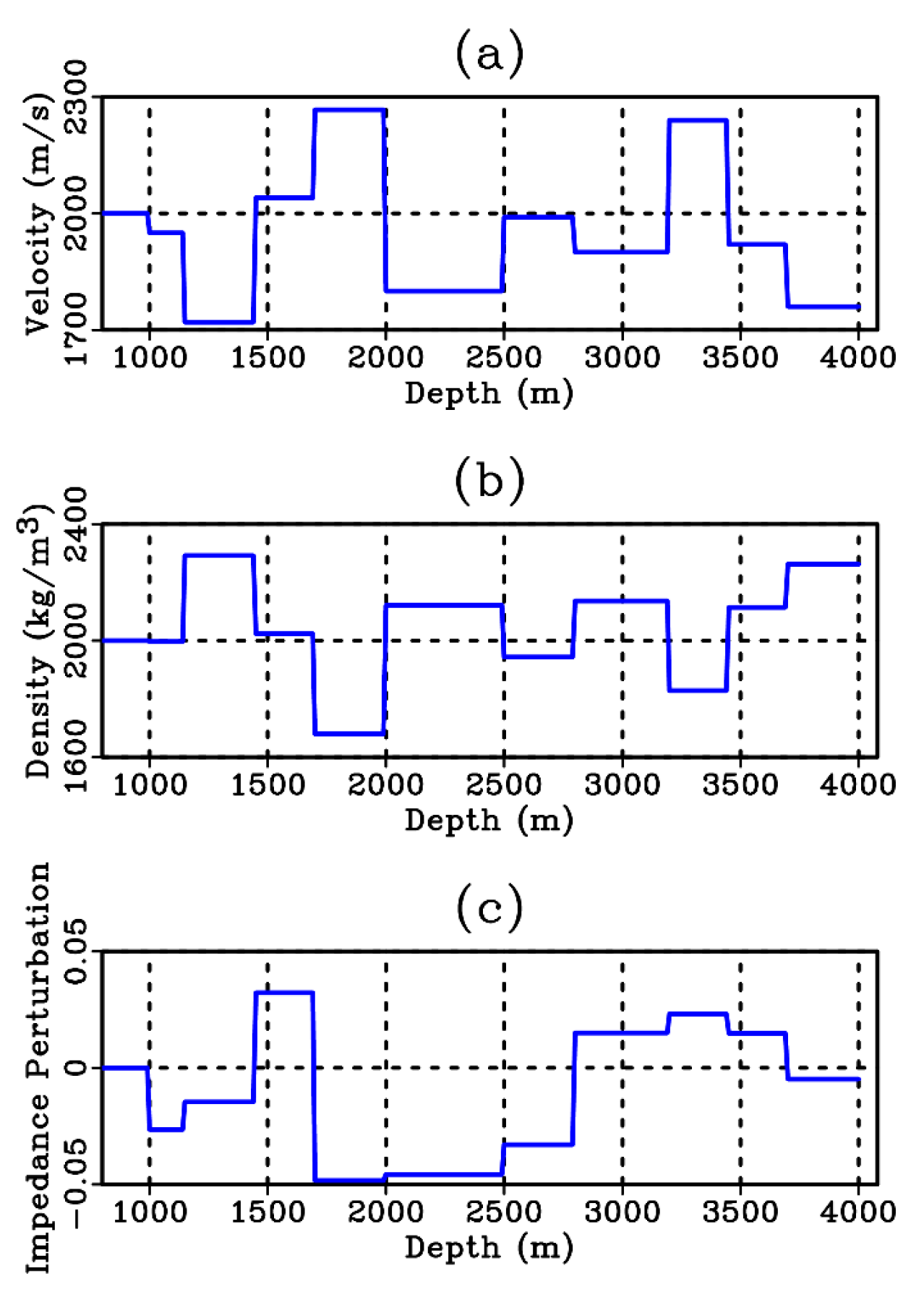
3. Numerical Examples
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Derivation of Equation (5)
Appendix B. Derivation of the Inverse of the Jacobian in Equation (A4)

References
- Latimer, R.; Davidson, R.; van Riel, P. An interpreter’s guide to understanding and working with seismic-derived acoustic impedance data. Lead. Edge 2000, 19, 242–256. [Google Scholar] [CrossRef]
- Routh, P.; Neelamani, R.; Lu, R.; Lazaratos, S.; Braaksma, H.; Hughes, S.; Saltzer, R.; Stewart, J.; Naidu, K.; Averill, H.; et al. Impact of high-resolution FWI in the Western Black Sea: Revealing overburden and reservoir complexity. Lead. Edge 2017, 36, 60–66. [Google Scholar] [CrossRef]
- Barclay, F.; Bruun, A.; Rasmussen, K.B.; Alfaro, J.C.; Cooke, A.; Cooke, D.; Salter, D.; Godfrey, R.; Lowden, D.; McHugo, S.; et al. Seismic inversion: Reading between the lines. Oilfield Rev. 2008, 1, 42–63. [Google Scholar]
- Beylkin, G. Imaging of discontinutes in the inverse scattering problem by inversion of a causal generalized Radon transform. J. Math. Phys. 1985, 26, 99–108. [Google Scholar] [CrossRef]
- Jin, S.; Madariaga, R.; Virieux, J.; Lambaré, G. Two-dimensional asymptotic iterative elastic inversion. Geophys. J. Int. 1992, 108, 575–588. [Google Scholar] [CrossRef]
- Forgues, E.; Lambaré, G. Parameterization study for acoustic and elastic ray+Born inversion. J. Seism. Explor. 1997, 6, 253–277. [Google Scholar]
- Thierry, P.; Operto, S.; Lambare, B. Fast 2-d ray+born migration/inversion in complex media. Geophysics 1999, 64, 162–181. [Google Scholar] [CrossRef]
- Bleistein, N.; Cohen, J.K.; Stockwell, J.W. Mathematics of Multidimensional Seismic Imaging, Migration, and Inversion; Springer: New York, NY, USA, 2001. [Google Scholar]
- Bleistein, N.; Zhang, Y.; Zhang, G.; Gray, S.H. Migration inversion: Think image point coordinates, process in acquisition surface coordinates. Inverse Probl. 2005, 21, 1715–1744. [Google Scholar] [CrossRef]
- Zhang, Y.; Ratcliffe, A.; Roberts, G.; Duan, L. Amplitude-preserving reverse time migration: From reflectivity to velocity and impedance inversion. Geophysics 2014, 79, S271–S283. [Google Scholar] [CrossRef]
- Whitmore, N.D.; Crawley, S. Applications of RTM inverse scattering imaging conditions. In Proceedings of the 82nd Annual International Meeting, SEG, Expanded Abstracts, Las Vegas, NV, USA, 4–9 November 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, Y.; Xu, S.; Bleistein, N.; Zhang, G. True-amplitude, angle-domain, common-image gathers from one-way wave-equation migrations. Geophysics 2007, 72, S49–S58. [Google Scholar] [CrossRef]
- Kiyashchenko, D.; Plessix, R.; Kashtan, B.; Troyan, V. A modified imaging principle for true-amplitude wave-equation migration. Geophys. J. Int. 2007, 168, 1093–1104. [Google Scholar] [CrossRef]
- Liang, H.; Zhang, H. Wavelet-domain reverse time migration image enhancement using inversion-based imaging condition. Geophysics 2019, 84, S401–S409. [Google Scholar] [CrossRef]
- Liang, H.; Zhang, H.; Liu, H. Reverse time migration for acoustic impedance inversion using inversion-based imaging condition. In Proceedings of the 89th Annual International Meeting, SEG, Expanded Abstracts, San Antonio, TX, USA, 15–20 September 2019; pp. 4365–4369. [Google Scholar] [CrossRef]
- Rocha, D.; Tanushev, N.; Sava, P. Acoustic wavefield imaging using the energy norm. Geophysics 2016, 81, S151–S163. [Google Scholar] [CrossRef]
- Paffenholz, J.; McLain, B.; Zaske, J.; Keliher, P. Subsalt multiple attenuation and imaging: Observations from the Sigsbee2B synthetic dataset. In Proceedings of the 72nd Annual International Meeting, SEG, Expanded Abstracts, Salt Lake City, UT, USA, 6–11 October 2012; pp. 2122–2125. [Google Scholar] [CrossRef]
- Fons ten Kroode, F.; Bergler, S.; Corsten, C.; de Maag, J.W.; Strijbos, F.; Tijhof, H. Broadband seismic data—The importance of low frequencies. Geophysics 2013, 78, WA3–WA14. [Google Scholar] [CrossRef]
- Zhang, H.; Liang, H.; Baek, H.; Zhao, Y. Computational aspects of finite-frequency traveltime inversion kernels. Geophysics 2021, 86, R109–R128. [Google Scholar] [CrossRef]
- Qin, B.; Lambare, G. Joint inversion of velocity and density in preserved-amplitude full-waveform inversion. In Proceedings of the 86th Annual International Meeting, SEG, Expanded Abstracts, Dallas, TX, USA, 16–21 October 2016; pp. 1325–1330. [Google Scholar] [CrossRef]
- Fomel, S.; Sava, P.; Vlad, I.; Liu, Y.; Bashkardin, V. Madagascar: Open-source software project for multidimensional data analysis and reproducible computational experiments. J. Open Res. Softw. 2013, 1, e8. [Google Scholar]
- Bleistein, N. On the imaging of reflectors in the earth. Geophysics 1987, 52, 1426–1436. [Google Scholar] [CrossRef]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, H.; Zhang, H.; Liu, H. Estimation of Relative Acoustic Impedance Perturbation from Reverse Time Migration Using a Modified Inverse Scattering Imaging Condition. Appl. Sci. 2023, 13, 5291. https://doi.org/10.3390/app13095291
Liang H, Zhang H, Liu H. Estimation of Relative Acoustic Impedance Perturbation from Reverse Time Migration Using a Modified Inverse Scattering Imaging Condition. Applied Sciences. 2023; 13(9):5291. https://doi.org/10.3390/app13095291
Chicago/Turabian StyleLiang, Hong, Houzhu Zhang, and Hongwei Liu. 2023. "Estimation of Relative Acoustic Impedance Perturbation from Reverse Time Migration Using a Modified Inverse Scattering Imaging Condition" Applied Sciences 13, no. 9: 5291. https://doi.org/10.3390/app13095291
APA StyleLiang, H., Zhang, H., & Liu, H. (2023). Estimation of Relative Acoustic Impedance Perturbation from Reverse Time Migration Using a Modified Inverse Scattering Imaging Condition. Applied Sciences, 13(9), 5291. https://doi.org/10.3390/app13095291