
Seismic Periodic Noise Attenuation Based on Sparse Representation Using a Noise Dictionary



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
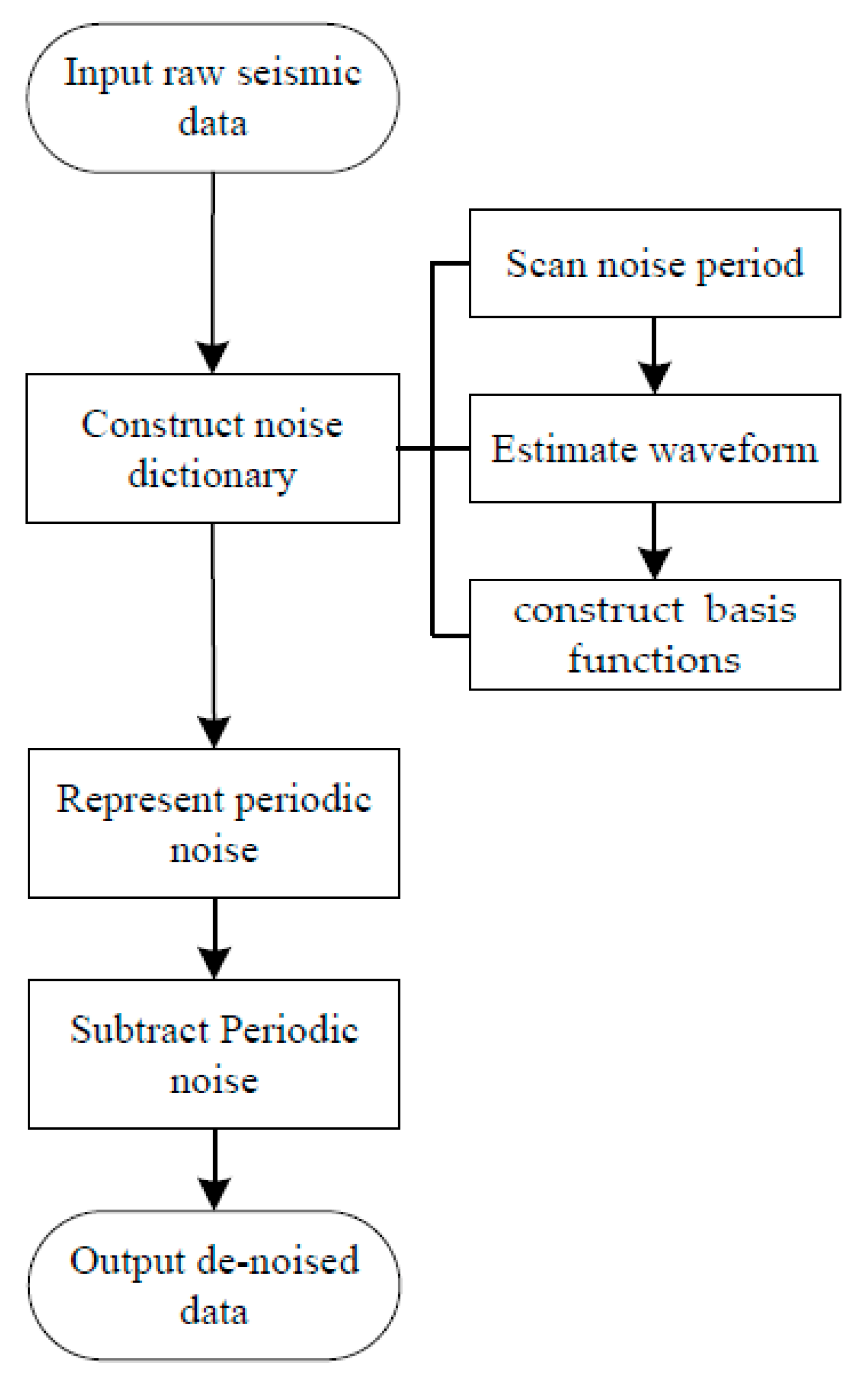
2. Method
2.1. Noise Period Scanning
2.2. Waveform Estimation by Stacking
2.3. Periodic Noise Representation
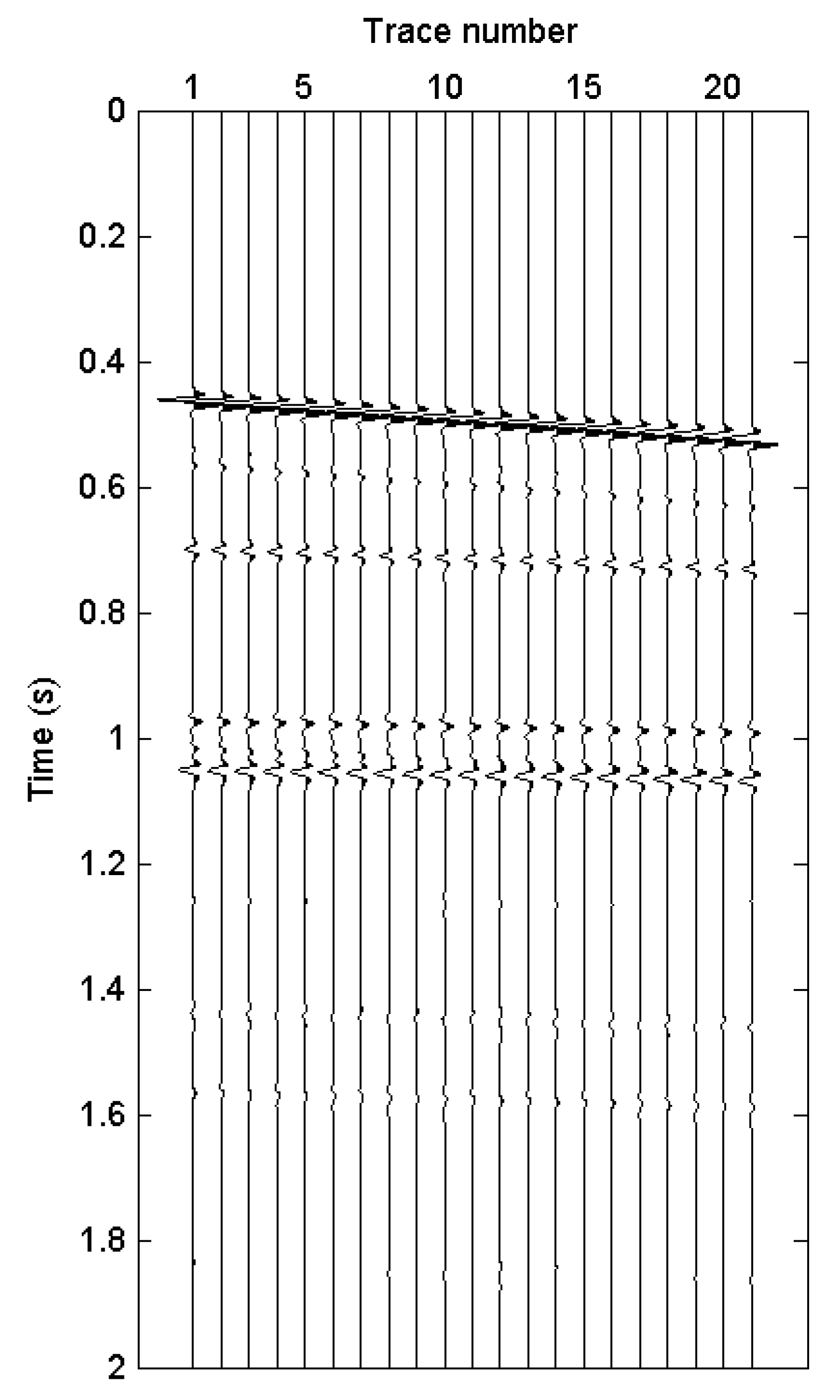
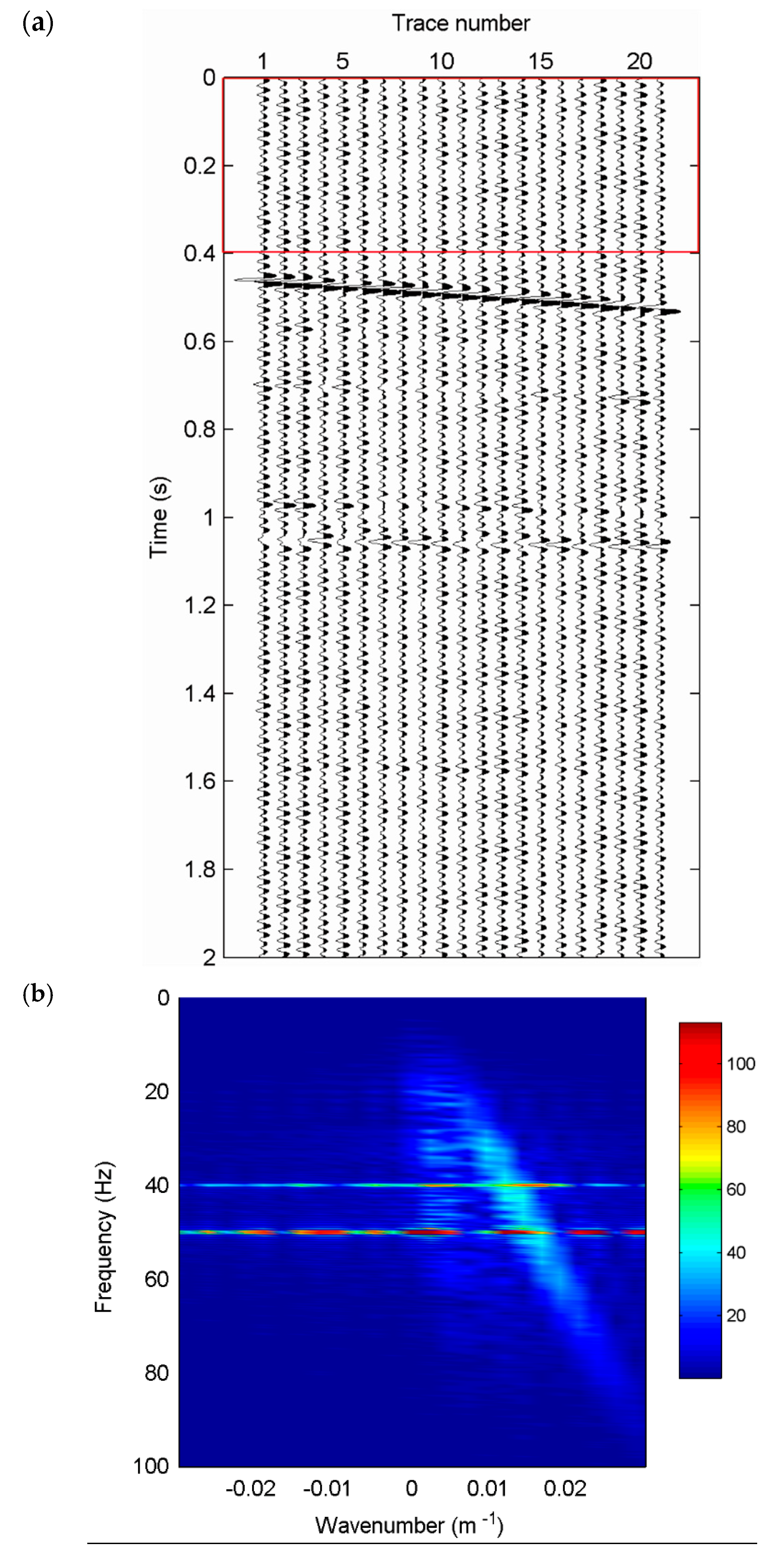
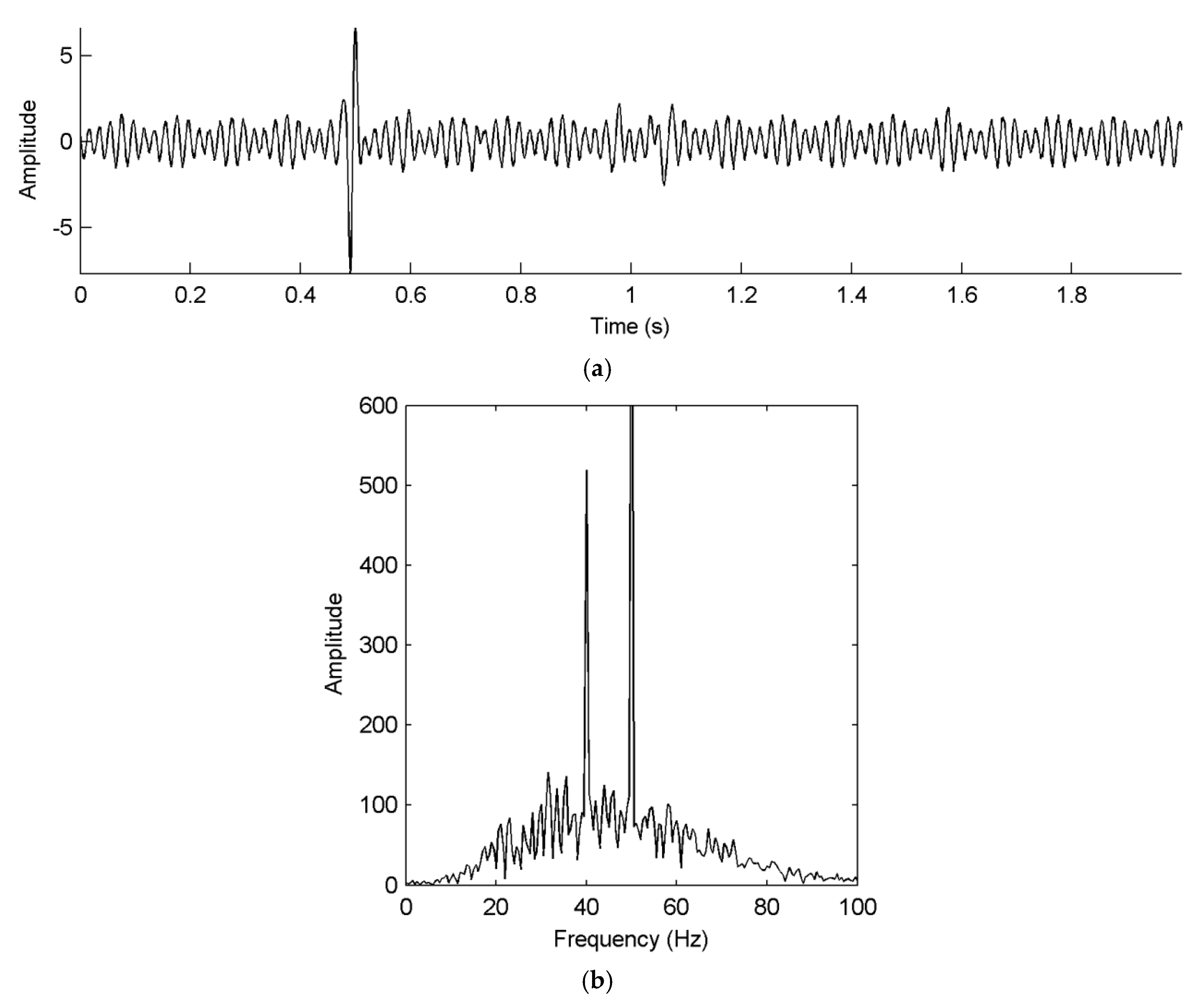
3. Synthetic Example
4. Field Example
5. Discussions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, G.; Li, Y.; Yang, B. Seismic exploration random noise on land: Modeling and application to noise suppression. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4668–4681. [Google Scholar] [CrossRef]
- Zhong, T.; Zhang, S.; Li, Y.; Yang, B. Simulation of seismic-prospecting random noise in the desert by a brownian-motion-based parametric modeling algorithm. Comptes Rendus Geosci. 2019, 351, 10–16. [Google Scholar] [CrossRef]
- Groos, J.; Ritter, J. Time domain classification and quantification of seismic noise in an urban environment. Geophys. J. Int. 2009, 179, 1213–1231. [Google Scholar] [CrossRef] [Green Version]
- Xu, J.; Wang, W.; Gao, J.; Chen, W. Monochromatic noise removal via sparsity-enabled signal decomposition method. IEEE Geosci. Remote Sens. Lett. 2013, 10, 533–537. [Google Scholar] [CrossRef]
- Meunier, J.; Bianchi, T. Harmonic noise reduction opens the way for array size reduction in vibroseis™ operations. In Seg Tech. Program Expand. Abstr. 2002, 21, 70–73. [Google Scholar] [CrossRef]
- Karsli, H.; Dondurur, D.; Güney, R. A comparison of post-stack results after filtering of harmonic noise using two filter methods. In Proceedings of the Near Surface Geoscience 2016-Second Applied Shallow Marine Geophysics Conference, Barcelona, Spain, 4–8 September 2016. [Google Scholar]
- Larsen, J.J.; Dalgaard, E.; Auken, E. Noise cancelling of mrs signals combining model-based removal of powerline harmonics and multichannel wiener filtering. Geophys. J. Int. 2013, 196, 828–836. [Google Scholar] [CrossRef] [Green Version]
- Yao, J.; Di, D.; Jiang, G.; Gao, S.; Yan, H. Real-time acceleration harmonics estimation for an electro-hydraulic servo shaking table using kalman filter with a linear model. IEEE Trans. Control Syst. Technol. 2014, 22, 794–800. [Google Scholar] [CrossRef]
- Olsson, P.-I.; Fiandaca, G.; Larsen, J.J.; Dahlin, T.; Auken, E. Doubling the spectrum of time-domain induced polarization by harmonic de-noising, drift correction, spike removal, tapered gating and data uncertainty estimation. Geophys. Suppl. Mon. Not. R. Astron. Soc. 2016, 207, 774–784. [Google Scholar] [CrossRef] [Green Version]
- Ghanati, R.; Hafizi, M. Statistical de-spiking and harmonic interference cancellation from surface-nmr signals via a state-conditioned filter and modified nyman-gaiser method. Boll. Di Geofis. Teor. Ed Appl. 2017, 58, 181–204. [Google Scholar]
- Saucier, A.; Marchant, M.; Chouteau, M. A fast and accurate frequency estimation method for canceling harmonic noise in geophysical records. Geophysics 2006, 71, V7–V18. [Google Scholar] [CrossRef]
- Henley, D.C. Spectral clipping: A promax module for attenuating strong monochromatic noise. CREWES Calg. AB Can. 2001, 13, 311–320. [Google Scholar]
- Karslı, H.; Dondurur, D. A mean-based filter to remove power line harmonic noise from seismic reflection data. J. Appl. Geophys. 2018, 153, 90–99. [Google Scholar] [CrossRef]
- Shao, J.; Wang, Y.; Yao, Y.; Wu, S.; Xue, Q.; Chang, X. Simultaneous denoising of multicomponent microseismic data by joint sparse representation with dictionary learning. Geophysics 2019, 84, KS155–KS172. [Google Scholar] [CrossRef]
- Huang, C.C.; Liang, S.F.; Young, M.S.; Shaw, F.Z. A novel application of the s-transform in removing powerline interference from biomedical signals. Physiol. Meas. 2008, 30, 13–27. [Google Scholar] [CrossRef]
- Ghanati, R.; Fallahsafari, M.; Hafizi, M.K. Joint application of a statistical optimization process and empirical mode decomposition to magnetic resonance sounding noise cancelation. J. Appl. Geophys. 2014, 111, 110–120. [Google Scholar] [CrossRef]
- Ghanati, R.; Hafizi, M.K.; Mahmoudvand, R.; Fallahsafari, M. Filtering and parameter estimation of surface-nmr data using singular spectrum analysis. J. Appl. Geophys. 2016, 130, 118–130. [Google Scholar] [CrossRef]
- Wang, D.; Li, Y.; Nie, P. A study on the gaussianity and stationarity of the random noise in the seismic exploration. J. Appl. Geophys. 2014, 109, 210–217. [Google Scholar] [CrossRef]
- Yilmaz, O. Seismic Data Analysis: Processing, Inversion, and Interpretation of Seismic Data; Society of Exploration Geophysicists: Tulsa, OK, USA, 2001. [Google Scholar]
- Mallat, S. A Wavelet Tour of Signal Processing: The Sparse Way, 3rd ed.; Elsevier: Amsterdam, The Netherlands, 2008. [Google Scholar]
- Mallat, S.G.; Zhang, Z. Matching pursuits with time-frequency dictionaries. IEEE Trans. Signal Process. 1993, 41, 3397–3415. [Google Scholar] [CrossRef] [Green Version]
- Zhong, T.; Li, Y.; Wu, N.; Nie, P.; Yang, B. Statistical properties of the random noise in seismic data. J. Appl. Geophys. 2015, 118, 84–91. [Google Scholar] [CrossRef]
- Zhong, T.; Li, Y.; Wu, N.; Nie, P.; Yang, B. A study on the stationarity and gaussianity of the background noise in land-seismic prospecting. Geophysics 2015, 80, V67–V82. [Google Scholar] [CrossRef]
- Mousavi, S.M.; Langston, C.A. Hybrid seismic denoising using higher-order statistics and improved wavelet block thresholding. Bull. Seismol. Soc. Am. 2016, 106, 1380–1393. [Google Scholar] [CrossRef]
- Jia, Y.; Ma, J. What can machine learning do for seismic data processing? An interpolation application. Geophysics 2017, 82, V163–V177. [Google Scholar] [CrossRef]

















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, L.; Qiu, X.; Wang, Y.; Wang, C. Seismic Periodic Noise Attenuation Based on Sparse Representation Using a Noise Dictionary. Appl. Sci. 2023, 13, 2835. https://doi.org/10.3390/app13052835
Sun L, Qiu X, Wang Y, Wang C. Seismic Periodic Noise Attenuation Based on Sparse Representation Using a Noise Dictionary. Applied Sciences. 2023; 13(5):2835. https://doi.org/10.3390/app13052835
Chicago/Turabian StyleSun, Lixia, Xinming Qiu, Yun Wang, and Chao Wang. 2023. "Seismic Periodic Noise Attenuation Based on Sparse Representation Using a Noise Dictionary" Applied Sciences 13, no. 5: 2835. https://doi.org/10.3390/app13052835
APA StyleSun, L., Qiu, X., Wang, Y., & Wang, C. (2023). Seismic Periodic Noise Attenuation Based on Sparse Representation Using a Noise Dictionary. Applied Sciences, 13(5), 2835. https://doi.org/10.3390/app13052835