

Current Situation and Future Development Direction of Soil Covering and Compacting Technology under Precision Seeding Conditions in China




Abstract
:1. Introduction
2. Precision Seeding Technology
2.1. The Seed-Spacing Consistency-Regulation Technology
2.2. Consistent Sowing-Depth Regulation Technology
3. Precision Sowing Conditions of consistent Sowing-Depth Regulation
3.1. Consistent Sowing-Depth Regulation Technology—Soil Covering
3.2. Consistent Sowing-Depth Regulation Technology—Soil Compacting
3.3. Future Development Issues and Dynamics
3.3.1. Soil Covering and Compacting Technology Developmental Issues
- (1)
- Precision-seeder soil-covering and compacting components for different operating environments lack the corresponding adaptability to soil covering, and basically, all companies are a product applied to various scenarios; at the same time, soil-compacting devices on different soils also have interoperability, which affects the lack of data accumulation and research.
- (2)
- In the soil-covering operation, the soil covering is mainly achieved by convergent reflux and other rough forms of soil covering, which is prone to uneven soil covering in the complex field environment, and which brings specific difficulties to the subsequent soil-compacting operation.
- (3)
- The contact soil components of domestic enterprises are mostly imported imitations, lacking core competitiveness in material technology. At the same time, there is a shorter service life than abroad, and the parts are not strong enough to cause damage in the complex field operating environment, easily affecting the operation, and so on.
- (4)
- At present, there is a lack of research into soil-covering devices, while the real-time regulation of soil compacting is in its initial stage. The development of intelligent soil-contact components for sowing depth control is a weak point.
- (5)
- With the popularization of high-speed precision-seeding technology, the technical problem of the corresponding domestic soil-covering and compacting devices effectively matching the performance requirements under high-speed working conditions has yet to be solved.
3.3.2. Development Prospects of Soil-Covering Active Compacting
- (1)
- Given the existence of soil characteristics, cropping patterns, crop varieties, and other existing differences in different regional geographical environments in China, the analysis clarifies the interactions between different soil-crop-touch components and develops regionally adapted soil-covering and compacting devices [12].
- (2)
- Improving enterprises’ processing and equipment technology through research in the material science of soil-covering and compacting touchdown components. To ensure the operation effect, the strength and life of the soil-covering and compacting contact parts should be improved.
- (3)
- Strengthening the optimization design of the structure of the soil-covering and compacting device through the soil-covering and compacting device in the process of operation to achieve viscosity reduction and resistance reduction, to ensure the operating effectiveness of the premise of effectively reducing power consumption and loss of soil contact parts.
- (4)
- Based on the traditional structure design [12], the research into the control method of soil covering and compacting is carried out by combining mechanical design and electrical control. Promoting the intellectual development of agricultural equipment and improving the operational performance and stability of the device.
- (5)
- Relying on the developmental trend of the industry, research into real-time regulation and control of a quantitative soil-covering active compacting link, through the close combination of agricultural machinery and agronomy, under the conditions of high-speed precision-seeding operation to further improve the operational quality and efficiency.
4. Conclusions
- (1)
- The soil-covering operational device of a large amount of soil covering will lead to excessive soil flow velocity on the seed bed impact, meaning that the seed displacement and grain-spacing consistency are affected; at the same time, the amount of uneven soil covering too much mulch will cause the dry soil and wet soil to be mixed, so that the seed cannot not germinate in the damp soil environment. In the actual operation process, the soil-covering process is carried out once. No secondary adjustment can be made, so achieving a stable and consistent soil-covering depth in the one-time soil-covering process is necessary.
- (2)
- The high-speed operation of precision seeding in China also provides an excellent test for the soil-compacting effect of the soil-compacting device. As the operating speed increases, the soil-compacting time of the unit area of the soil-compacting wheel decreases. The lack of soil-compacting pressure means that the seed and soil contact is not close enough, affecting the seed germination. At the same time, the soil-compacting pressure is constantly decreasing in the soil, and there needs to be more research on how to achieve a suitable and consistent soil-compacting pressure around the seed bed and on the soil surface.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhu, T. Research on Pneum Atic-Mech Anical Com Pound Peanut Precision Seed-m Etering Device. Master’s Thesis, Shihezi University, Shihezi, China, 2021. [Google Scholar]
- Li, Q.C. Mechanism Analysis and Experimental Study on Scoop Type Precision Seed Metering Device for Small Size Vegetable Seeds. Ph.D. Thesis, Northeast Agricultural University, Harbin, China, 2020. [Google Scholar]
- Notice on Further Improving the Quality of Mechanized Seeding. Available online: https://www.moa.gov.cn/xw/zwdt/202302/t2023021464 (accessed on 24 March 2023).
- Li, Y.; Zhang, W.M.; Wu, C.L.; Zhang, C.Q. Effects of Sowing Depth on Yield of Maize Inbred Lines and Its Reason Analysis. Seed 2016, 35, 128–130. [Google Scholar]
- Li, B.F. Agricultural Mechanics; China Agricultural Press: Beijing, China, 2003. [Google Scholar]
- Fu, W.Q. Study on Key Technology of Quality Control for Maize No-Tillage Drilling Machinery. Ph.D. Thesis, China Agricultural University, Beijing, China, 2019. [Google Scholar]
- Wang, J.L. The Research of Position Control after Seed Contacting Soil in the Process of Soil Covering and Rolling with Precision Seeder. Ph.D. Thesis, Jilin University, Changchun, China, 2012. [Google Scholar]
- Zhang, R. Study on Precision Depth-Control Mechanism of Corn No-Till Planter in Double-Cropping Area. Ph.D. Thesis, China Agricultural University, Beijing, China, 2016. [Google Scholar]
- Kinsner, W.; Gamby, G.; Froese, R.A.; Tessier, T. A fuzzy seeding depth monitoring and control system. In Proceedings of the IEEE WESCANEX 93 Communications, Computers and Power in the Modern Environment—Conference, Saskatoon, SK, Canada, 17–18 May 1993. [Google Scholar]
- Rivera, D.; Jáuregui, B.M.; Peco, B. The fate of herbaceous seeds during topsoil stockpiling: Restoration potential of seed banks. Ecol. Eng. 2012, 44, 94–101. [Google Scholar] [CrossRef]
- Sun, J.; Guo, X.N.; Liang, J.X. Distribution and Diversity of Soil Microbial Community Response to Conservation Tillage and Its Mechanism. Ningxia Agric. For. Technol. 2020, 61, 19–23. [Google Scholar]
- Jia, H.L.; Wang, W.P.; Chen, Z.; Zheng, T.Z.; Zhang, P.; Zhuang, J. Research Status and Prospect of Soil-engaging Components Optimization for Agricultural Machinery. Trans. Chin. Soc. Agric. Mach. 2017, 48, 1–13. [Google Scholar]
- Liu, X.W. Experimental Study on Double-Deck Disk Soil Coverer. Master’s Thesis, Jilin Agricultural University, Changchun, China, 2015. [Google Scholar]
- Xu, T.Y. Experimental Study and Simulation Analysis of the Working Process of the Precision Seeding Unit and Its Key Parts. Ph.D. Thesis, Jilin University, Changchun, China, 2019. [Google Scholar]
- Fu, W.; Li, S.F.; Sun, J.Y.; Yang, H.Y.; Kan, Z.A. Design of compulsory clamp-type precision seed-metering device for corn. Trans. Chin. Soc. Agric. Eng. 2011, 27, 38–42. [Google Scholar]
- Hu, J. Theory and Experimental Research of Sowing Depth Control for Precision Seeder Unit Control for Precision Seeder Unit. Ph.D. Thesis, Jilin University, Changchun, China, 2012. [Google Scholar]
- Zhang, X.G. The Optimization Design and Experiment Study on Seed-metering Mechanism of Soybean Seeder. Master’s Thesis, Henan Agricultural University, Zhengzhou, China, 2013. [Google Scholar]
- Cheng, Y.L. Research of Air- Suction Mechanical Combined Soybean High-Speed and Precision Seed Metering Device. Ph.D. Thesis, Jilin University, Changchun, China, 2018. [Google Scholar]
- Luo, S.B. Design and Experiment of Seed-Dropping for Friction Seed-Metering Device. Master’s Thesis, Northeast Agricultural University, Harbin, China, 2019. [Google Scholar]
- Arzu, Y.; Adnan, D. Optimization of the seed spacing uniformity performance of a vacuum type precision seeder using response surface methodology. Biosyst. Eng. 2007, 97, 347–356. [Google Scholar]
- Gao, H.J. Design and Experimental Study of General Precision Seed Metering Device for Corn and Soybean. Master’s Thesis, Jilin Agricultural University, Changchun, China, 2022. [Google Scholar]
- Yang, L.; Yan, B.X.; Zhang, D.X.; Zhang, T.L.; Wang, Y.X.; Cui, T. Research Progress on Precision Planting Technology of Maize. Trans. Chin. Soc. Agric. Mach. 2016, 47, 38–48. [Google Scholar]
- Zhou, P. Experimental Study on Seed-Metering Performance of Finger-Clamp Type Seed-Metering Device. Master’s Thesis, Inner Mongolia Agricultural University, Hohhot, China, 2018. [Google Scholar]
- Hu, Y. Design and Experiment Research on Pneumatic Metering Device for Rice and Wheat. Master’s Thesis, Huazhong Agricultural University, Wuhan, China, 2019. [Google Scholar] [CrossRef]
- Lan, T.Y. Design and Experimental Study on Horizontal Disc Seed Metering Device of Cyperus Esculentus. Master’s Thesis, Jilin Agricultural University, Changchun, China, 2022. [Google Scholar]
- Liu, J.; Cui, T.; Zhang, D.X.; Huang, S.L.; Shi, S. Experimental study on pressure of air-blowing precision seed-metering device. Trans. Chin. Soc. Agric. Eng. 2011, 27, 18–22. [Google Scholar]
- Dai, Y.Z. Design and Experiment of Design and Experiment of Centralized Pneumatic Rice Drilling Machine for Dry Land. Ph.D. Thesis, South China Agricultural University, Guangzhou, China, 2018. [Google Scholar]
- Qi, B. Design and Experiment of a Centralized Pneumatic Metering Device. Ph.D. Thesis, China Agricultural University, Beijing, China, 2014. [Google Scholar]
- Yan, B.X. Design and Research of Vacuum Precision Seed-metering Device with Synchronously Rotating Plate and Chamber. Ph.D. Thesis, China Agricultural University, Beijing, China, 2018. [Google Scholar]
- The International Advanced Anchor to the Ground Practical Beckwith Attack High-End Seeding Machine to Lead the Intelligent New Time. Available online: http://cc.jlnongji.cn/qgdt/2023-03-17/244474.html (accessed on 24 March 2023).
- Shi, S. Design and Experimental Research of the Pneumatic Maize Design and Experimental Research of the Pneumatic Maize Precision Seed-Metering Device with Combined Holes. Ph.D. Thesis, China Agricultural University, Beijing, China, 2015. [Google Scholar]
- Yang, Z.G. Simulation and Experimental Research of Air-blowing Corn Seed-Metering Device. Master’s Thesis, Jilin University, Changchun, China, 2015. [Google Scholar]
- Mudarisov, S.; Badretdinov, I.; Rakhimov, Z. Numerical simulation of two-phase—Air-Seed flow in the distribution system of the grain seeder. Comput. Electron. Agric. 2020, 168, 10–51. [Google Scholar] [CrossRef]
- Jin, Y.D. Design and Experimental Research of Centralized Precision Soybean Seed-M Etering Device. Master’s Thesis, Northeast Agricultural University, Harbin, China, 2018. [Google Scholar]
- Liu, Q.W. Design and Experiment of Seed Precise Delivery Mechanism for High-speed Planter. Ph.D. Thesis, China Agricultural University, Beijing, China, 2017. [Google Scholar]
- Sauder, G.A.; Dill, K.R.; Dunlap, D.L. Apparatus and Method for Controlled Delivery of Seed to an Open Furrow. United States patent US 6681706B2, 26 February 2002. [Google Scholar]
- Bai, H.C.; Yi, S.J.; Feng, Z.H. Corn precision seeding technology development status and outlook. China South. Agric. Mach. 2021, 52, 74–75. [Google Scholar]
- Wang, Y.X.; Zhang, W.Y.; Yan, W.; Qi, B. Design and Experiment of Seed Pressing Device for Precision Seeder Based on Air Flow Assisted Seed Delivery. Trans. Chin. Soc. Agric. Mach. 2020, 51, 69–76. [Google Scholar]
- Yang, S.; Wang, X.; Gao, Y.Y.; Chen, L.P.; Zhai, C.Y.; Dou, H.J. Design of On-line Seed Spacing Monitoring and Miss Seeding Warning System for Maize Precision Planting. Trans. Chin. Soc. Agric. Mach. 2021, 52, 17–24+35. [Google Scholar]
- Fu, Y.T. Design and Experimental Research on Real-Time Monitoring System of Corn No-Till Planter Sowing Depth. Master’s Thesis, Heilongjiang Bayi Agricultural University, Daqing, China, 2022. [Google Scholar] [CrossRef]
- Feng, X. Design and Experiment of Sowing Depth Control Device for Potato Planter in Hilly Lands. Master’s Thesis, Northeast Agricultural University, Harbin, China, 2020. [Google Scholar] [CrossRef]
- Song, L.P. Research on Disc Covering Device Key Technology and Equipment of Peanut Precision Seeding. Master’s Thesis, Shandong University of Technology, Zibo, China, 2015. [Google Scholar]
- Li, Y.L.; Wang, J.L. Analysis of research status of soil covering device for precision seeder. Agric. Technol. 2016, 36, 42–44. [Google Scholar]
- Plant for Success [EB/OL]. (13 June 2007). Available online: https://www.deere.com/en/planting-equipment/ (accessed on 26 March 2023).
- Wang, M.; Ma, X.; Yuan, R.; Yuan, Y.M.; Wang, J.L. Experimental Study on Displacement of Seed Bounce and Rolling Based on Uniform Design. J. Jilin Agric. Univ. 2006, 28, 694–696. [Google Scholar]
- Song, L.P.; Yang, X.H.; Li, Q. Simulation study on precision seeding disc covering device based on SPHOs mesh less method. J. Chin. Agric. Mech. 2016, 37, 29–32. [Google Scholar]
- Liu, X.W.; Jin, L.; Zhao, Y.X.; Guo, H.Y.; Wang, J.L. Experimental research of double-deck disk coverer based on uniform design. J. Chin. Agric. Mech. 2016, 2, 26–28. [Google Scholar]
- Yao, L.T.; Luo, X.; Cao, X.L.; Zeng, C.J.; Wu, L.F.; Liu, Y.; Chen, D.; Huang, X.H. Design and Experiment of 2FF-100 Fertilizing and Soil Covering Machine for Hilly Orchard. Acta Agric. Jiangxi 2022, 34, 209–213. [Google Scholar]
- Sun, W.; Liu, X.L.; Shi, L.R.; Zhang, H.; Liu, Q.W.; Wu, J.M. Covering Soil on Plastic-film Characteristics of Scraper Lifting Belt Mechanism. J. Mech. Eng. 2016, 52, 38–45. [Google Scholar] [CrossRef]
- Chao, B.B.; Yuan, P.P.; Han, C.J.; You, J.; Gao, J. Design of Automatic Regulating Device for Soil Cover of Transplanter. J. Agric. Mech. Res. 2022, 44, 54–58. [Google Scholar]
- Zhan, M.R.; Wang, S.Y.; Yan, S.Z. Comparative test of four types of soil covering for Stropharia rugoso-annulata. Edible Fungi 2022, 44, 28–30. [Google Scholar]
- Wang, J.F. Design and Experimental Study on Compaction Mechanism for Dry Land Rice Direct Seeder. Master’s Thesis, Shenyang Agricultural University, Shenyang, China, 2019. [Google Scholar]
- CASE IH 2000 Series Seeders. Available online: https://www.caseih.com/northamerica/en-us/products/planting-seeding/2000-series-early-riser-planter (accessed on 27 March 2023).
- Sefa, A.; Ahmet, C. The effects of tillage and intra-row compaction on seedbed properties and red lentil emergence under dry land conditions. Soil Tillage Res. 2011, 114, 1–8. [Google Scholar]
- Guo, H.; Chen, Z.; Jia, H.L.; Zheng, T.Z.; Wang, G.; Wang, Q. Design and experiment of soil-covering and soil-compacting device with cone-shaped structure of wheel. Trans. Chin. Soc. Agric. Eng. 2017, 33, 56–65. [Google Scholar]
- Mani, I.; Kumar, P.; Panwar, J.S.; Kant, K. Variation in energy consumption in production of wheat-maize with varying altitudes in hilly regions of Himachal Pradesh, India. Energy 2007, 32, 2336–2339. [Google Scholar] [CrossRef]
- Wang, H.Y. Study on 2BMFJ-3 Type No-Till Soybean Precision Planter with Straw-Covering in Wheat Stubble Fields. Ph.D. Thesis, Northeast Agricultural University, Harbin, China, 2013. [Google Scholar]
- Wang, W.J. Bionic Press Device with Profiling Mechanism for Soybean Precision Planter. Master’s Thesis, Jilin University, Changchun, China, 2016. [Google Scholar]
- Zhao, J.L. Research of Key Technology of No-Tillage Seeder for Stubble Retain with Alternating Tillage. Ph.D. Thesis, Jilin University, Changchun, China, 2015. [Google Scholar]
- Chang, Y. Bionic Soil Press Roller with Convex Geometrical Structure. Master’s Thesis, Jilin University, Changchun, China, 2014. [Google Scholar]
- Jia, H.L.; Wang, W.J.; Zhuang, J.; Luo, X.F.; Yao, P.F.; Li, Y. Design and Experiment on Reducing Soil Adhesion and Anti-slip Structure of Profiling Elastic Press Roller. Trans. Chin. Soc. Agric. Mach. 2015, 46, 20–27. [Google Scholar]
- Chen, J. Design and Test of Electric Drive Wheat Drill. Master’s Thesis, Henan Agricultural University, Zhengzhou, China, 2018. [Google Scholar]
- Xiao, H. Optimal Design and Experimental Research on Bionic Repression Wheel of No-Till Planter. Master’s Thesis, Jilin Agricultural University, Changchun, China, 2022. [Google Scholar] [CrossRef]
- Jia, H.L.; Wang, W.P.; Chen, Z.; Zhuang, J.; Wang, W.J.; Liu, H.L. Real-time pressure measurement of profiling elastic press roller based on soil cone Real-time pressure measurement of profiling elastic press roller based on soil coneindex. J. Jilin Univ. 2018, 48, 1169–1175. [Google Scholar]
- Bai, H.J.; Fang, X.F.; Wang, D.C.; Yuan, Y.W.; Zhou, L.M.; Niu, K. Design and Test of Control System for Seeding Depth and Compaction of Corn Precision Planter. Trans. Chin. Soc. Agric. Mach. 2020, 51, 61–72. [Google Scholar]
- John Deere High Speed Air Suction Seeding Monobloc.
- RFM AG Spring-Loaded Ballast Device Promotion. Available online: https://www.farm-equipment.com/articles/13941-rfm-and-poly-tech-unveil-the-new-spring-coil-press-wheel (accessed on 27 March 2023).
- Schaffert’s Chicken Claw Suppression Device. Available online: https://www.schaffert.com/products/closing-wheels/furrow-v-closer.html (accessed on 27 March 2023).
- Liu, H.J. Research on Key Technologies of Press Device for Planter in Hilly Region of Northeast China. Ph.D. Thesis, Northeast Agricultural University, Harbin, China, 2019. [Google Scholar]
- Li, D. Research and Design of Monitoring System on Precision Seeder. Master’s Thesis, Shandong University of Technology, Zibo, China, 2013. [Google Scholar]
- Jiang, Y.W. The Evolution and Trend Analysis of Bionic Technology in China’s Agricultural Field. Master’s Thesis, Jilin University, Changchun, China, 2019. [Google Scholar]
- Zhang, C. Design and Experimental Study of Excitation Device of Self-Propelled Dwarf and Close Planting Jujube Harvester. Master’s Thesis, Shihezi University, Shihezi, China, 2015. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Application Scenario | Major Technology | Each and Every Link | Influence Results | |
|---|---|---|---|---|
| The precision seed-discharge technology | Seed metering device | Mechanical seed metering devices, pneumatic seed metering devices | Discharge of seeds | The consistency of seed spacing |
| The smooth seed-dropping technology | Seed-guiding device | Conveyor-belt-type seed guide, brush-belt-type seed guide | Seed path orientation | |
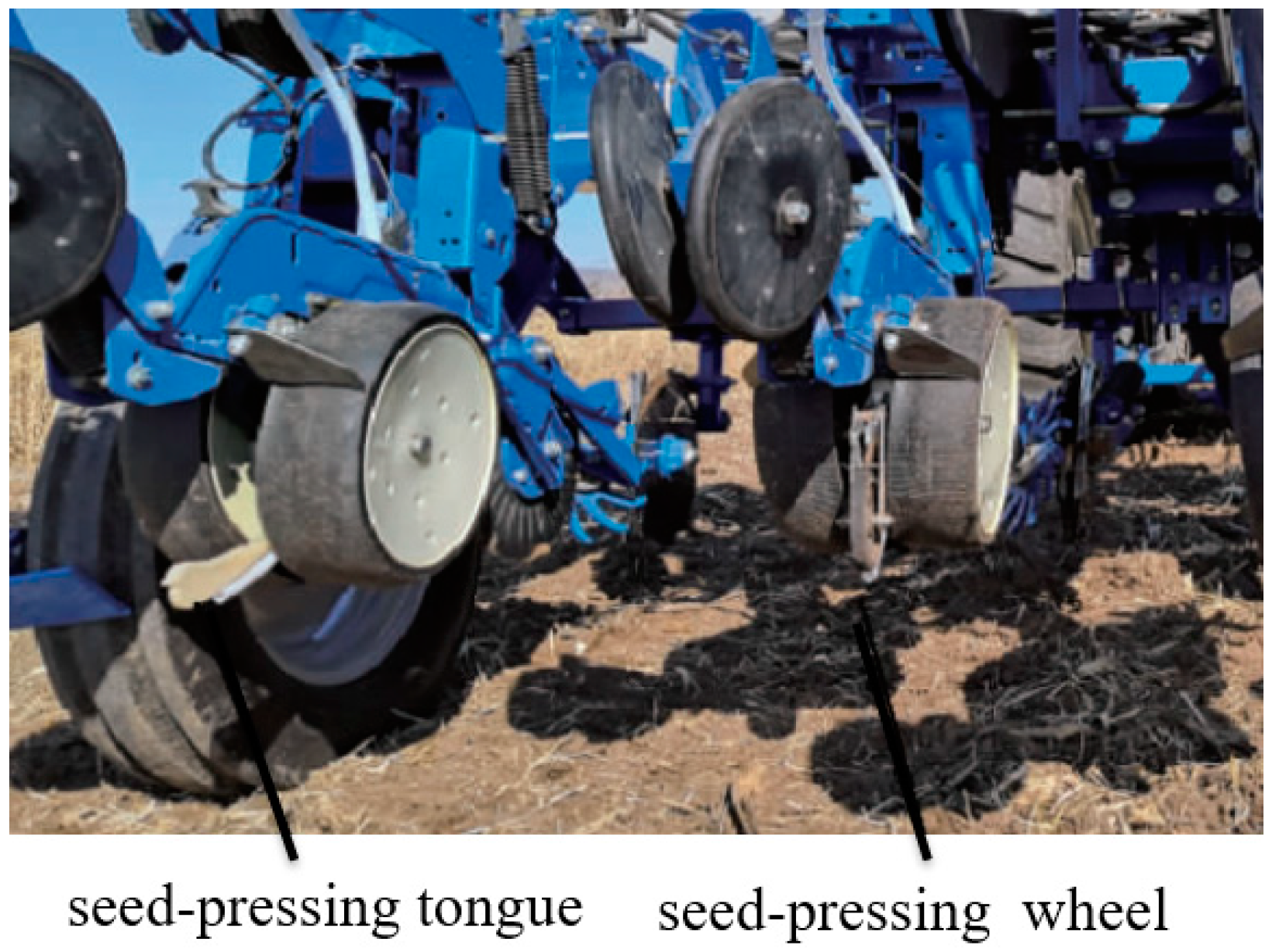
| The seeds falling into the seed bed with precision | Seed bed | Seed-pressing wheel, seed-pressing tongue | The fall into the seed bed | |
| The consistent sowing-depth regulation technology | The devices in contact with soil | Terrain-adapting furrow opener, soil covering and compacting | Covering seeds | The sowing-depth-consistency regulation |
| Type | Advantage | Disadvantages |
|---|---|---|
| Mechanical type | Simple structure and low cost | Poor adaptability, inconvenient adjustment, and inability to regulate town pressure in real time |
| Pneumatic type | No over-compaction and town-pressure regulation | Slow response time |
| Hydraulic type | Faster speed adjustment of town pressure is possible | More complex structure than mechanical type |
| Methods | Type | Classification | Principle of Operation |
|---|---|---|---|
| Traditional viscosity-reduction and resistance-reduction. | Mechanical type | Scraping method | The scraping part on the soil-touching part removes the adhering soil. |
| Vibration method | By applying vibration to the part that adheres to the soil, the soil is continuously shaken and dislodged from the part. | ||
| Surface modification | Whole or partial-change method | Overall shape change or local area geometrical change on the overall surface of the earth-touching component. | |
| Bionic-viscosity-reduction and resistance-reduction. | Structural Bionics | Biological non-smooth bionic | Structural design of devices that mimic the unique body shape and form of living things. |
| Biomorphic Biomimicry | Body shape (shape, form) biomimicry, conformation that mimics the shape of a living organism. | ||
| Functional bionics | Bio-flexible bionic | Mimicking the non-linear deformation of living organisms, it can recover its original position and realize the function of decoupling and reducing resistance through bio-flexible recovery. | |
| Elasticity method | Change in the degree of deformation of the contact surface, so that the soil falls off during the deformation of the component. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, W.; He, J.; Lu, C.; Lin, H.; Yang, H.; Li, H. Current Situation and Future Development Direction of Soil Covering and Compacting Technology under Precision Seeding Conditions in China. Appl. Sci. 2023, 13, 6586. https://doi.org/10.3390/app13116586
Yang W, He J, Lu C, Lin H, Yang H, Li H. Current Situation and Future Development Direction of Soil Covering and Compacting Technology under Precision Seeding Conditions in China. Applied Sciences. 2023; 13(11):6586. https://doi.org/10.3390/app13116586
Chicago/Turabian StyleYang, Wenchao, Jin He, Caiyun Lu, Han Lin, Hanyu Yang, and Hang Li. 2023. "Current Situation and Future Development Direction of Soil Covering and Compacting Technology under Precision Seeding Conditions in China" Applied Sciences 13, no. 11: 6586. https://doi.org/10.3390/app13116586
APA StyleYang, W., He, J., Lu, C., Lin, H., Yang, H., & Li, H. (2023). Current Situation and Future Development Direction of Soil Covering and Compacting Technology under Precision Seeding Conditions in China. Applied Sciences, 13(11), 6586. https://doi.org/10.3390/app13116586