


Design and Application of Logical Range Framework Based on Digital Twin


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- We analyze the problems related to existing Logical Range approaches and propose a Logical Range framework based on digital twin technology.
- We implement the proposed framework and introduce several key technologies used in the system based on the framework.
- We verify the feasibility of our proposed framework through a flight test.
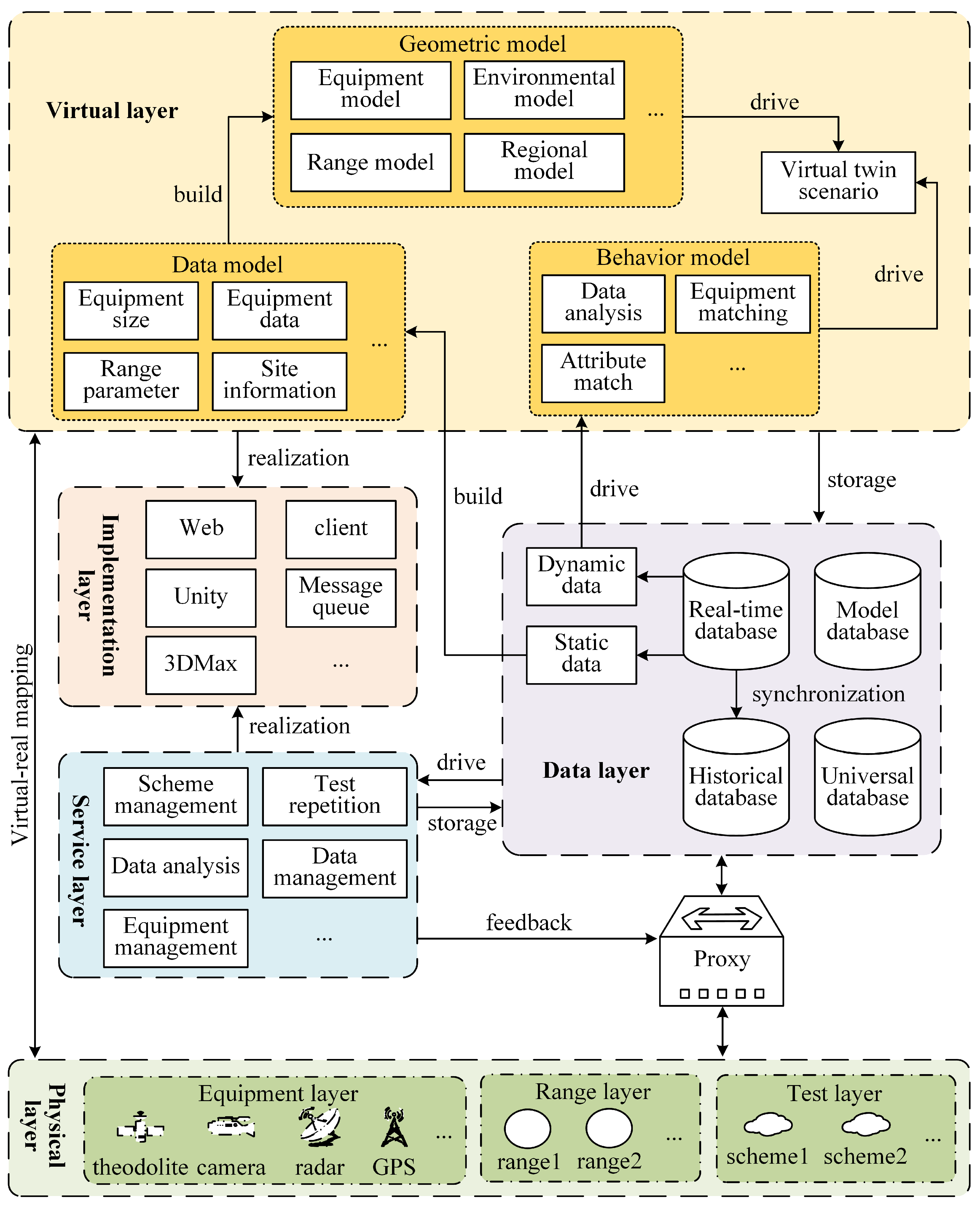
2. Logical Range Framework Based on Digital Twin
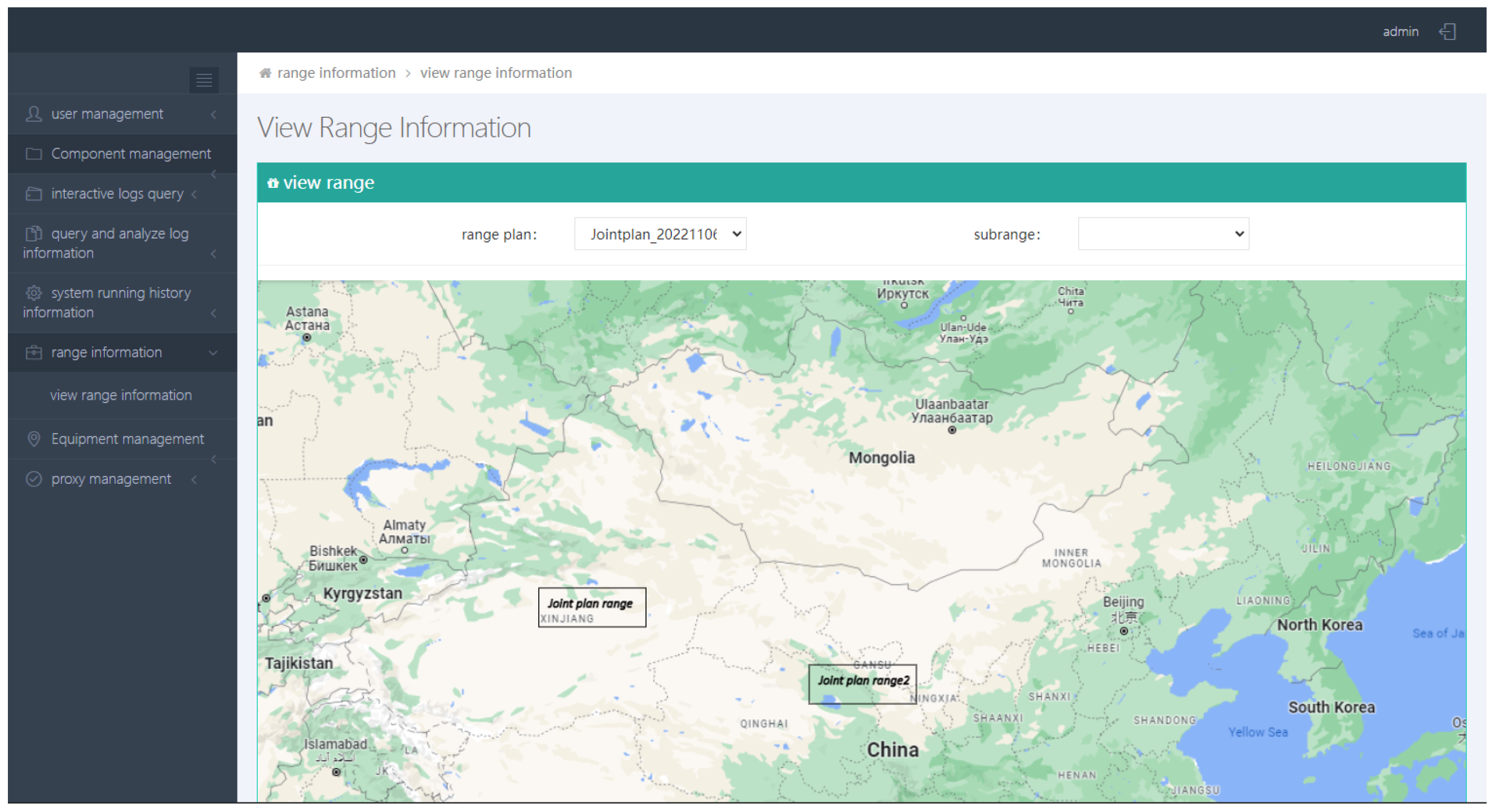
- Physical LayerAs the basis of the whole framework, the physical layer is divided into an equipment layer (), range layer (), and test layer (), according to the application scenario and functional structure. The relationship between these layers is as follows:The equipment layer can be regarded as the basis of the physical layer, which is composed of theodolite, high-speed camera, radar, and GPS (Global Positioning System) equipment, along with the other equipment and test resources distributed in each range. The range layer consists of ranges distributed in different regions. As a complex of test resources, the range is also the basic unit of the flight test process. The test layer consists of different test schemes. The test scheme includes all the supporting resources and information needed for a test, usually consisting of one or more ranges.
- Data LayerData play a crucial role in the whole system. Data flow between different parts of the system drives the operation of the whole system. The data in the data layer are mainly composed of physical layer data, virtual layer data, and service layer data. The physical layer data are mainly composed of static data and dynamic data. Static data include equipment information, geometric parameters, and so on. Dynamic data are the data collected and generated by the equipment during operation. The data of the virtual layer are mainly composed of the data model, geometric model, behavioral model, and data generated by the virtual twin scene. The real-time data and historical data collected and generated during the operation of each model and scene in the virtual layer are part of the virtual layer data. The data of the service layer are composed of the data generated by each functional module in the service layer during operation, including the source data obtained from different databases and the data generated by various calculations in the service layer.
- Virtual LayerAs the “twin” of the physical layer, the virtual layer is an indispensable part of the system. The virtual layer is mainly composed of a data model (), geometric model (), behavior model (), and virtual twin scene (). The relationship between them is given as follows:The data model is constructed from static data in the data layer, providing data support for the geometric model. The geometric model, supported by the data model, describes geometric information such as the appearance, structure, and size of various types of equipment and ranges. The behavior model is driven by dynamic data, through the script file, in order to achieve real-time data matching. The virtual twin scene is a virtual scene constructed under the joint action of the three models mentioned above, which can logically restore the Logical Range with high fidelity.
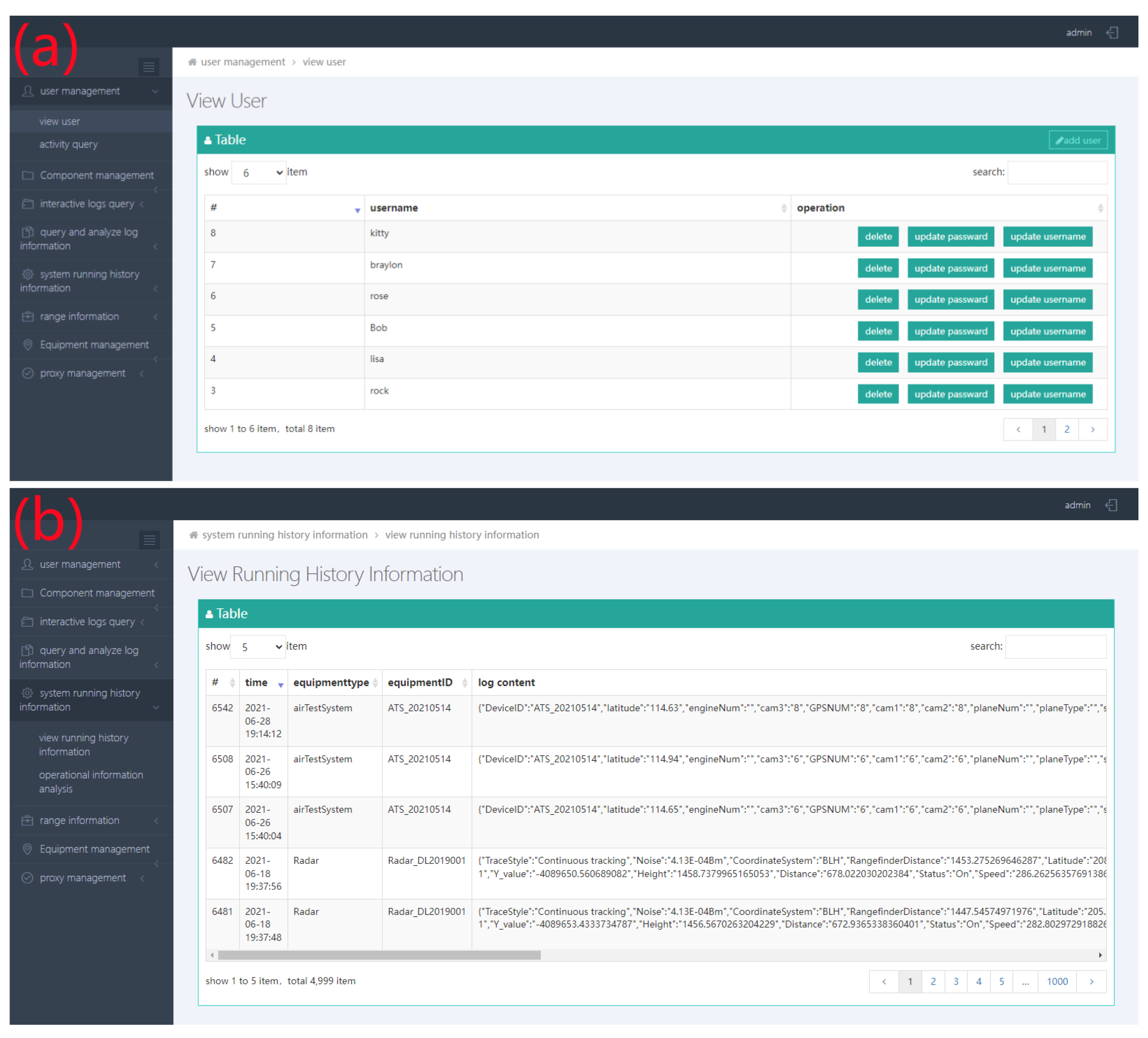
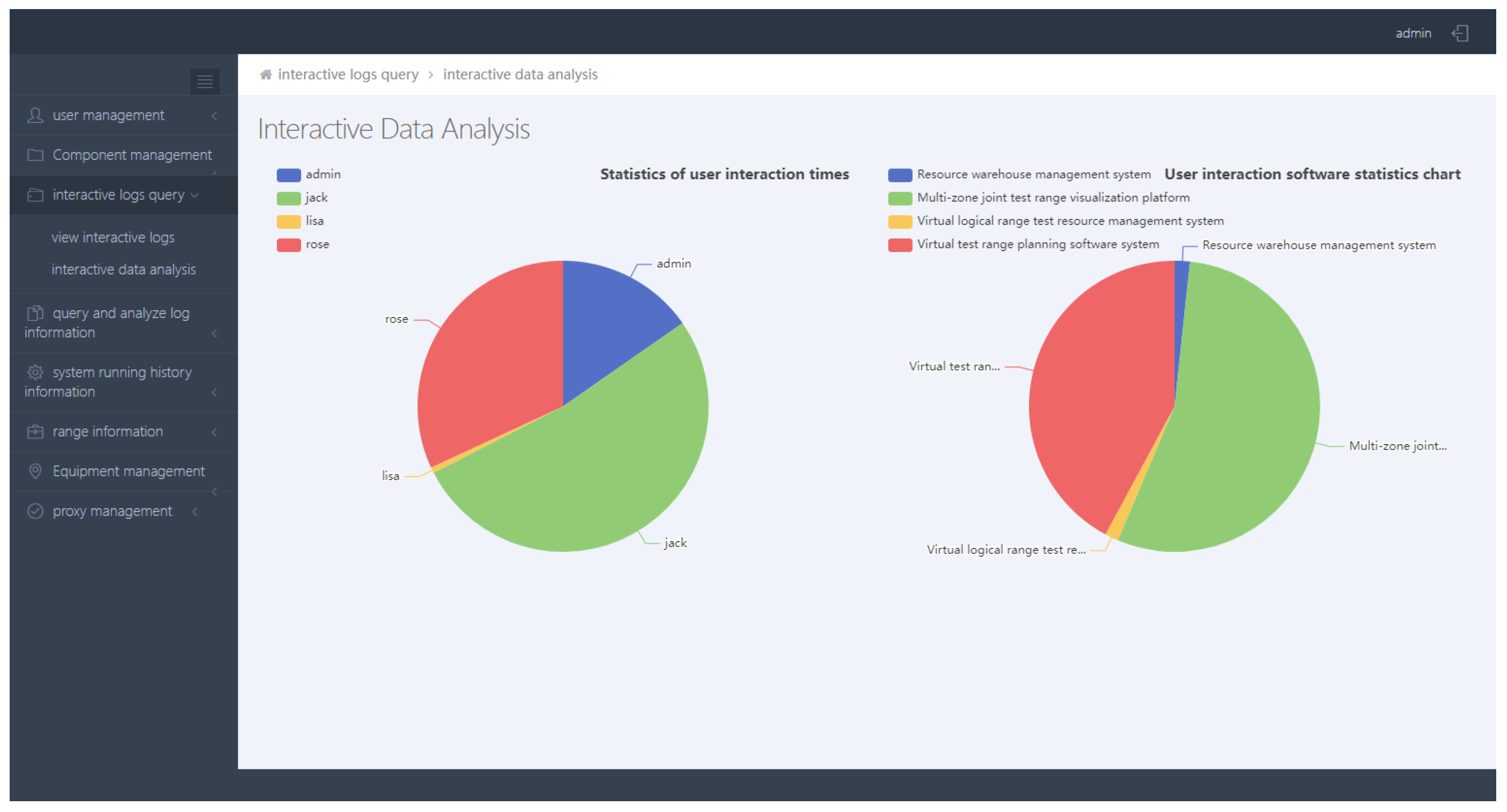
- Service LayerThe service layer implements its corresponding functions based on the drivers of the data layer. With the support of the data layer, the service layer can realize the functions that the physical layer and the virtual layer cannot, such as all kinds of data management, visualization and analysis, test reproduction, equipment management, and so on. At the same time, the correlation calculation results of the service layer allow for feedback with the physical layer to optimize the functioning of the physical layer.
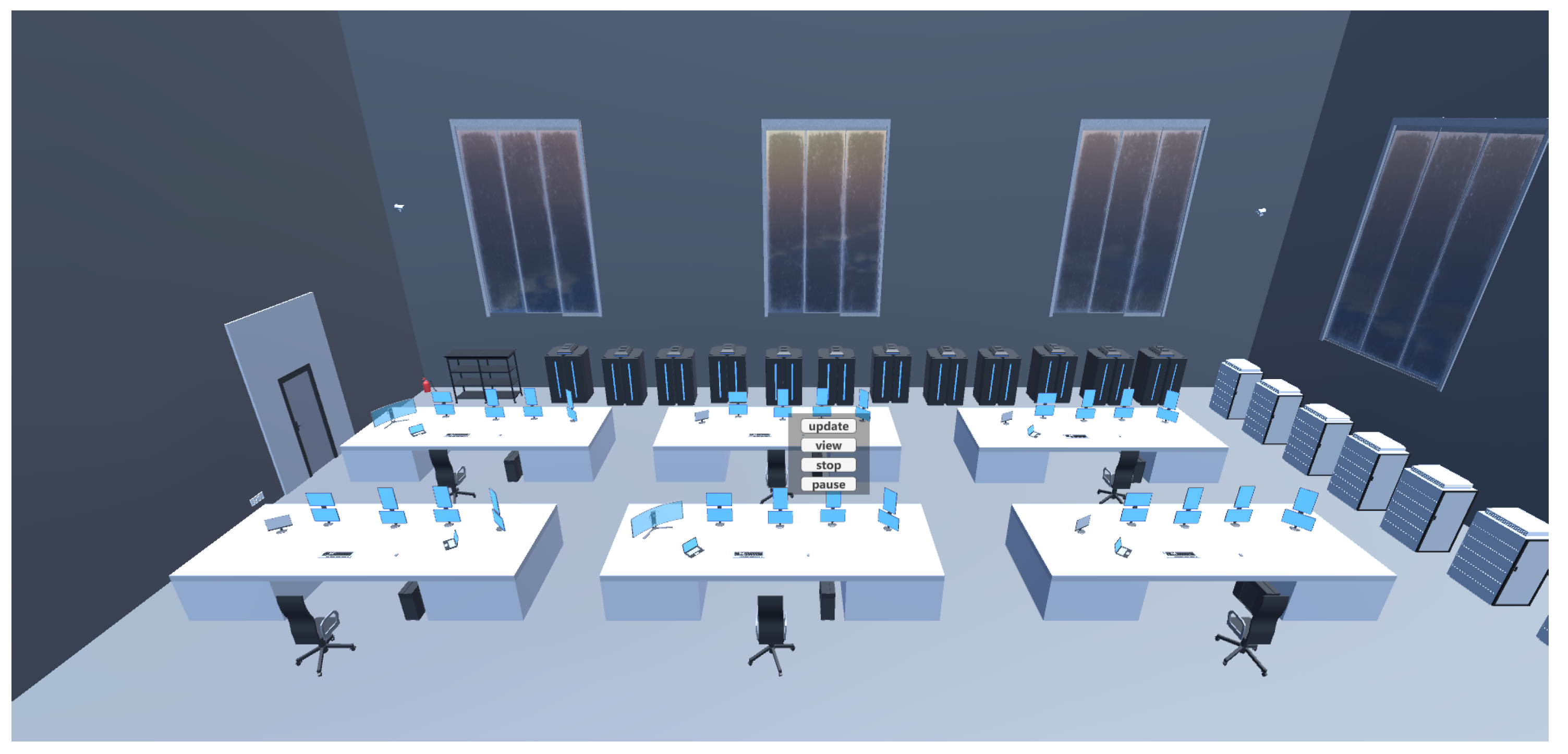
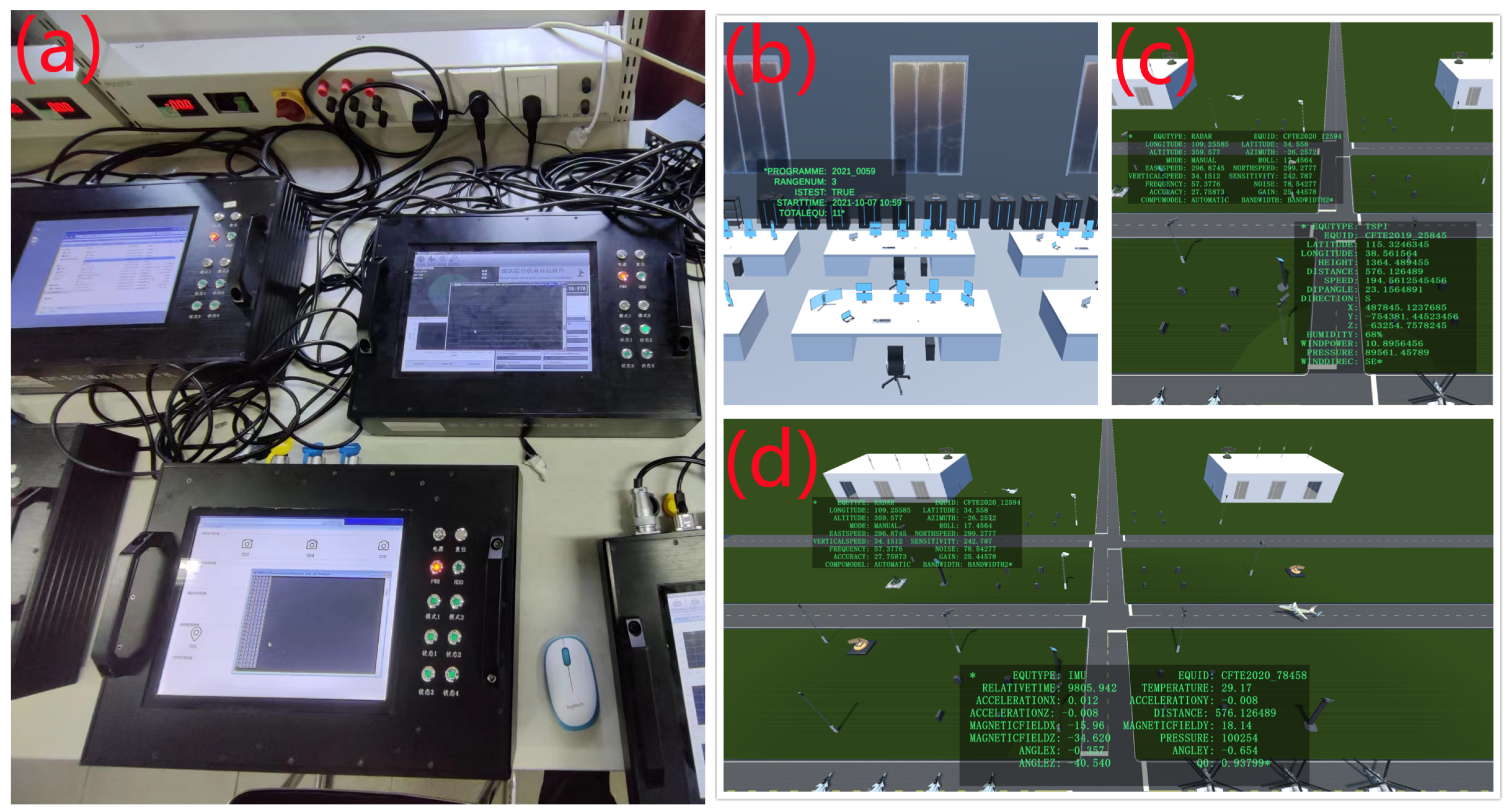
- Implementation LayerThe implementation layer is required to implement the whole system using related technologies. The modeling software is used to model the equipment and the modeling results are imported into Unity 3D, in order to realize the construction and display of the equipment “twin”. The data-related functions are implemented in the form of webpages through a well-designed human–machine interface and interaction mode. Both desktop clients and mobile phones can access and operate the webpages.
3. Key Technologies
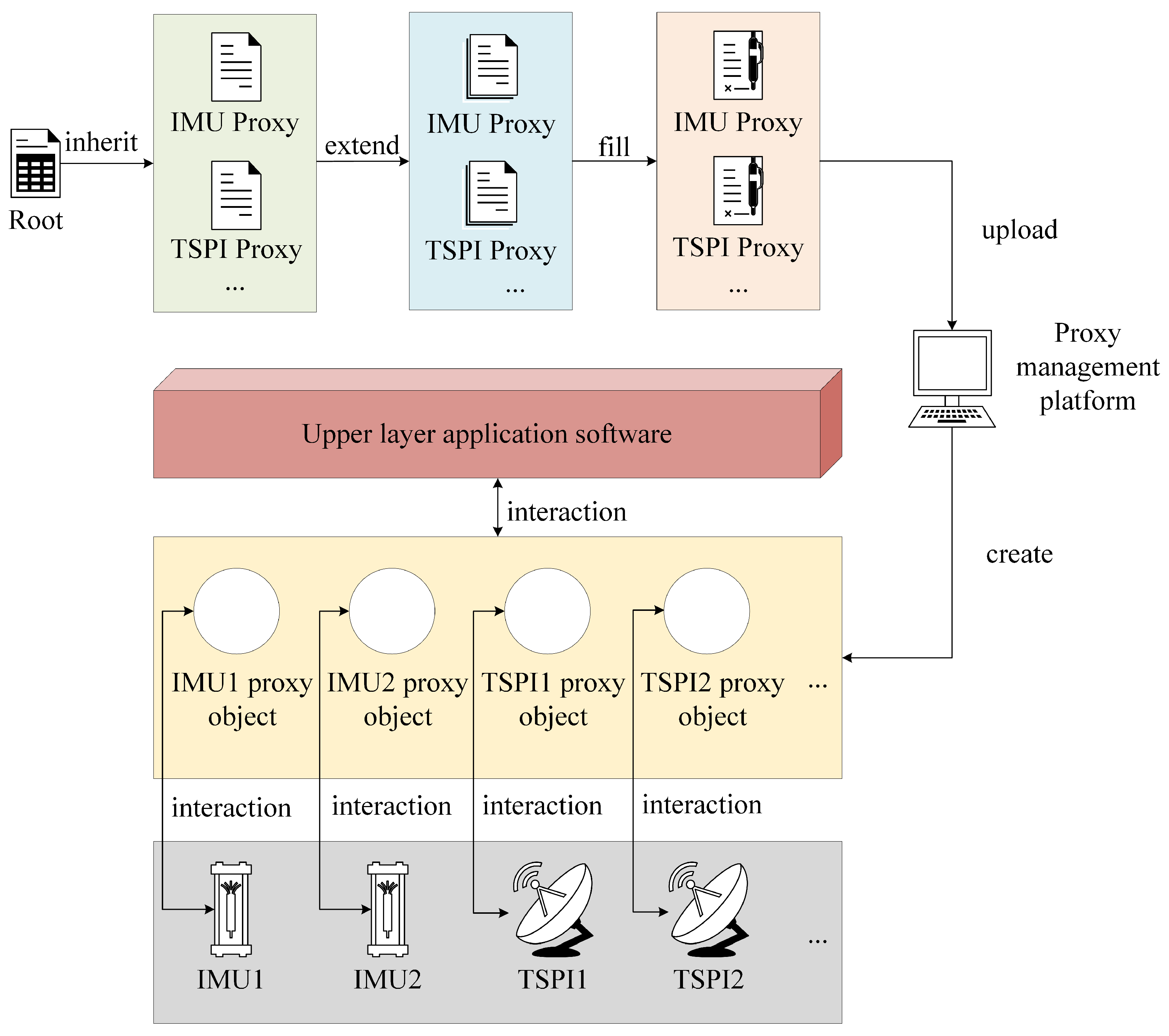
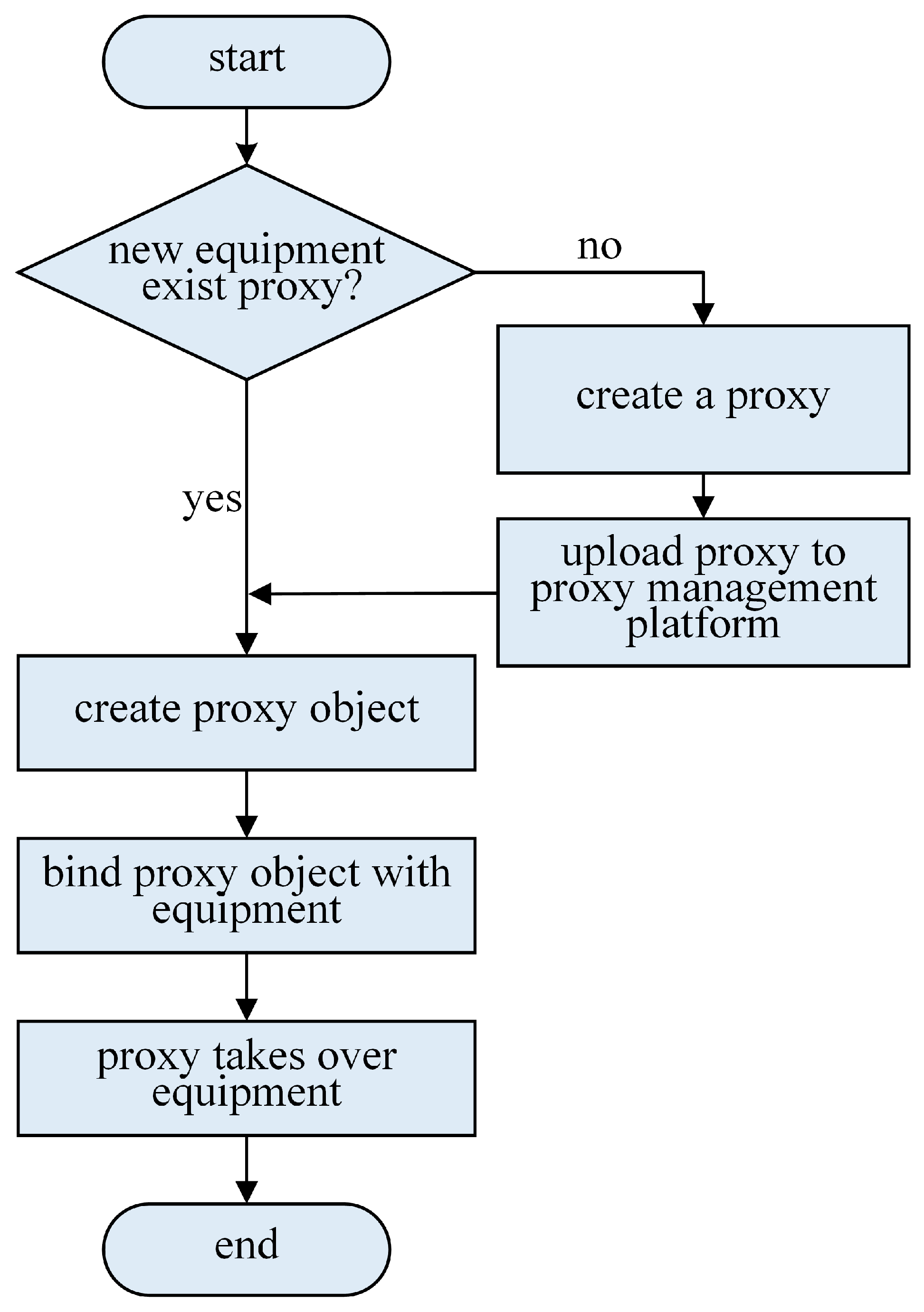
3.1. Proxy-Based Equipment Dynamic Extension Method
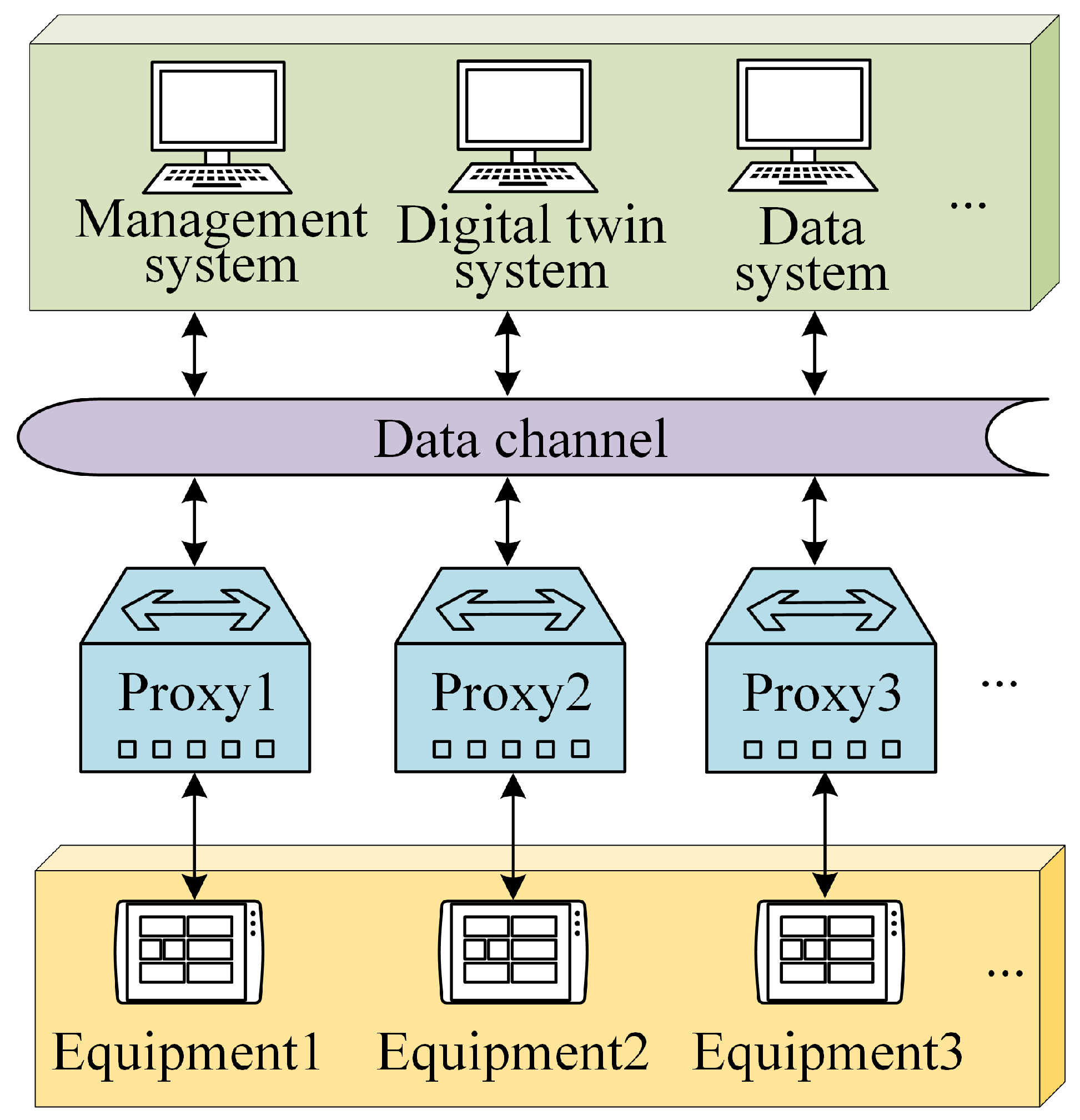
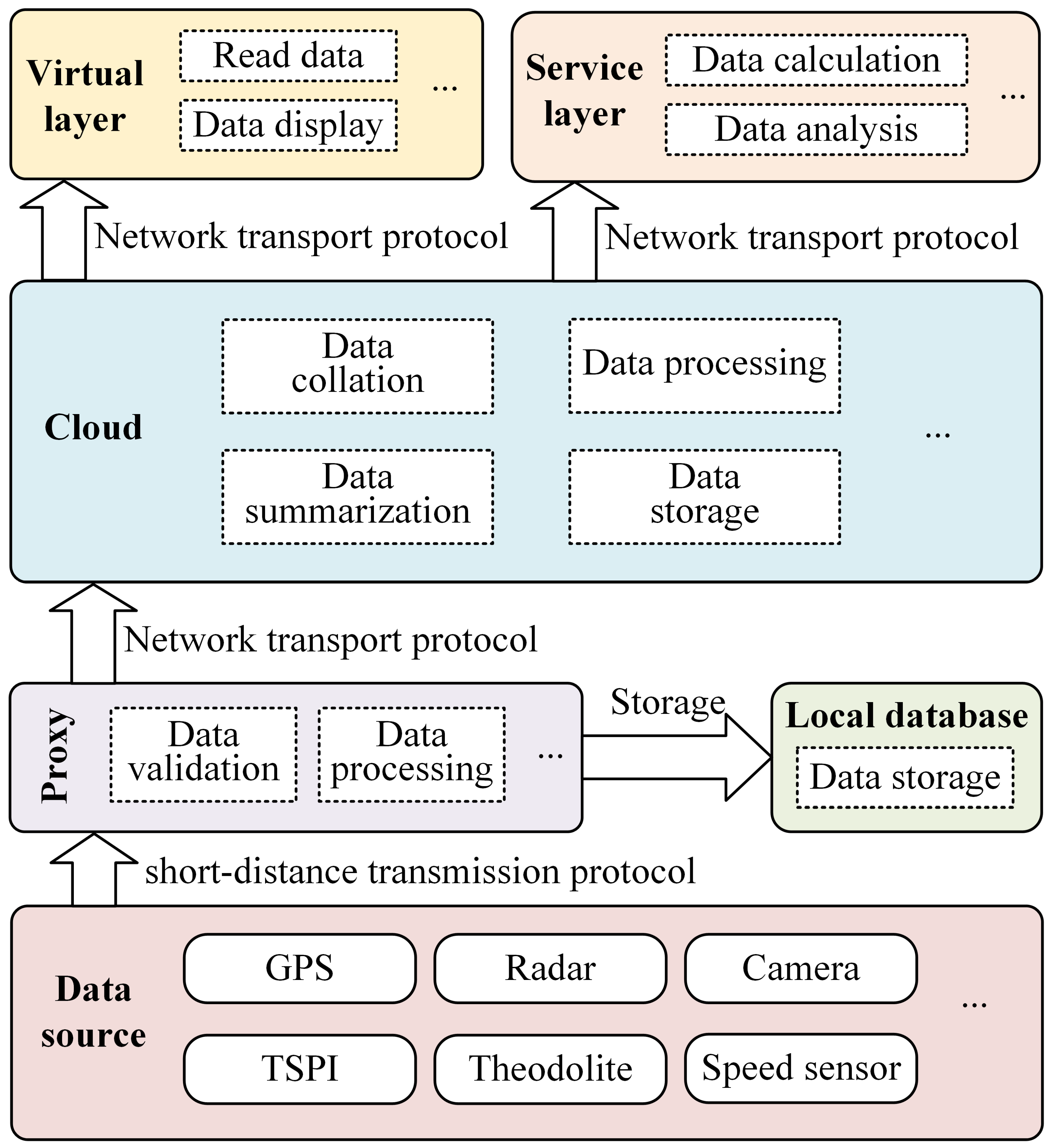
3.2. Data Communication Architecture
3.3. Virtual–Real Synchronous Mapping Method
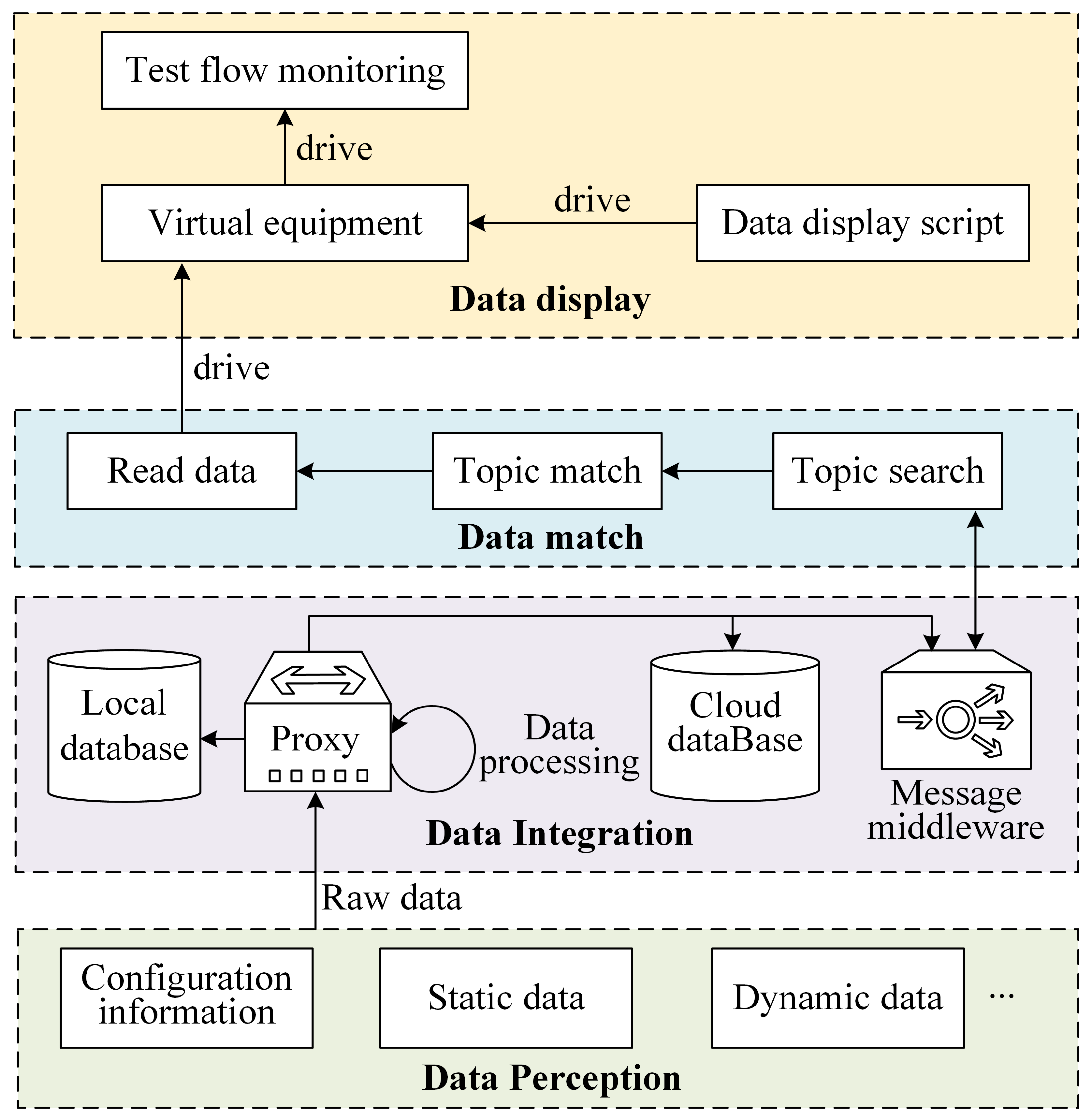
- Data AcquisitionThe first step of data acquisition is to accurately collect the original data from the physical test field in real-time. The collected data will be used as the data source for the data processing and mapping phases. In order to be compatible with a variety of data transfer protocols, proxies are developed for all kinds of equipment. The proxy collects raw data through serial ports, Bluetooth, local area networks, and so on.
- Data IntegrationWith the real-time massive data collected during the data acquisition stage, data integration mainly involves pre-processing operations (e.g., data cleaning and conversion), followed by the unified storage and management of data, ensuring that the value of the data is maximized.
- Data MatchingIn order to realize virtual–real synchronous data mapping, a subscribe/publish data transmission mode was designed based on search tree. For each piece of physical equipment, its proxy will create a topic in the message middleware during the initialization process for the transmission of equipment data, and the topic name is added to the search tree. Models in the virtual space will search the search tree for topic names before receiving data. As the topic names satisfy certain generation rules, at least one result will be retrieved and topic matching can be completed.
- Data VisualizationOnce the data matching is completed, the twin model in the virtual space receives real-time data from the physical space. These real-time data will drive the virtual equipment to update its state, according to the time sequence, thus completing the state update of the whole twin scene.
4. Application Examples and Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Sample Availability
References
- Çelik, T.; Gökdoğan, G.F.; Öztürk, K.; Sarikaya, B. An HLA-based tactical environment application framework. J. Def. Model. Simul. 2013, 10, 217–233. [Google Scholar] [CrossRef]
- Noseworthy, J.R. The test and training enabling architecture (TENA) supporting the decentralized development of distributed applications and LVC simulations. In Proceedings of the 2008 12th IEEE/ACM International Symposium on Distributed Simulation and Real-Time Applications, Washington, DC, USA, 27–29 October 2008; pp. 259–268. [Google Scholar]
- Guoyu, W.; Runmin, F. Logical Range and joint test training. Mod. Mil. Aff. 2006, 9, 55–58. [Google Scholar]
- Huan, M. Development of Logical Range Planning Furthermore, Verification Tool for Joint Test Platform. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2018. [Google Scholar]
- Wei, Y.; Guo, L.; Chen, L.; Zhang, H.; Hu, X.; Zhou, H.; Li, G. Research and implementation of digital twin workshop based on real-time data driven. Comput. Integr. Manuf. Syst. 2021, 27, 352–363. [Google Scholar]
- Bao, Q.; Zhao, G.; Yu, Y.; Dai, S.; Wang, W. The ontology-based modeling and evolution of digital twin for assembly workshop. Int. J. Adv. Manuf. Technol. 2021, 117, 395–411. [Google Scholar] [CrossRef]
- Li, S.; Shu, L.; Wu, G.; Yang, Y.; Yang, M. Digital twin workshop system of circuit breaker based on logic Petri net. Comput. Integr. Manuf. Syst. 2022, 28, 455–465. [Google Scholar]
- Ghaith, M.; Yosri, A.; El-Dakhakhni, W. Synchronization-Enhanced Deep Learning Early Flood Risk Predictions: The Core of Data-Driven City Digital Twins for Climate Resilience Planning. Water 2022, 14, 3619. [Google Scholar] [CrossRef]
- Austin, M.; Delgoshaei, P.; Coelho, M.; Heidarinejad, M. Architecting smart city digital twins: Combined semantic model and machine learning approach. J. Manag. Eng. 2020, 36, 04020026. [Google Scholar] [CrossRef]
- Raes, L.; Michiels, P.; Adolphi, T.; Tampere, C.; Dalianis, A.; McAleer, S.; Kogut, P. DUET: A Framework for Building Interoperable and Trusted Digital Twins of Smart Cities. IEEE Internet Comput. 2021, 26, 43–50. [Google Scholar] [CrossRef]
- Chen, X.; Liu, F.; Ai, Y.; Xu, G.; Chen, J.; Xu, X.; Liang, W. Key characteristics analysis of industrial digital twins for smart manufacturing. Sci. Technol. Rev. 2022, 40, 45–54. [Google Scholar]
- Liu, S.; Lu, Y.; Li, J.; Shen, X.; Sun, X.; Bao, J. A blockchain-based interactive approach between digital twin-based manufacturing systems. Comput. Ind. Eng. 2023, 175, 108827. [Google Scholar] [CrossRef]
- Jwo, J.S.; Lee, C.H.; Lin, C.S. Data twin-driven cyber-physical factory for smart manufacturing. Sensors 2022, 22, 2821. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Shu, L.; Zhou, H. Multi-Robot Collaborative Flexible Manufacturing and Digital Twin System Design of Circuit Breakers. Appl. Sci. 2023, 13, 2721. [Google Scholar] [CrossRef]
- Chen, H.; Jeremiah, S.R.; Lee, C.; Park, J.H. A Digital Twin-Based Heuristic Multi-Cooperation Scheduling Framework for Smart Manufacturing in IIoT Environment. Appl. Sci. 2023, 13, 1440. [Google Scholar] [CrossRef]
- Alnowaiser, K.K.; Ahmed, M.A. Digital Twin: Current Research Trends and Future Directions. Arab. J. Sci. Eng. 2022, 48, 1075–1095. [Google Scholar] [CrossRef]
- Liu, S.; Sun, X.; Lu, Y.; Wang, B.; Bao, J.; Guo, G. A Knowledge-Driven Digital Twin Modeling Method for Machining Products Based on Biomimicry. J. Mech. Eng. 2021, 57, 182–194. [Google Scholar]
- Kapteyn, M.G.; Knezevic, D.J.; Huynh, D.; Tran, M.; Willcox, K.E. Data-driven physics-based digital twins via a library of component-based reduced-order models. Int. J. Numer. Methods Eng. 2022, 123, 2986–3003. [Google Scholar] [CrossRef]
- Hu, F.; Yang, Y.; Liu, S.; Zheng, X.; Lv, X.; Bao, J. Digital twin high-fidelity modeling method for spinning forming of aerospace thin-walled parts. Comput. Integr. Manuf. Syst. 2020, 40, 1–17. [Google Scholar]
- Wang, Y.; Liu, Y.; Wang, J.; Zhang, J.; Zhu, X.; Xu, Z. Research on Process Planning Method of Aerospace Engine Bolt Tightening Based on Digital Twin. Machines 2022, 10, 1048. [Google Scholar] [CrossRef]
- Liu, X.; Tang, L.; Zeng, H.; Liu, Y.; Zhang, X. Smart design and simulation of aerospace control system based on digital twin. J. Syst. Simul. 2019, 31, 377. [Google Scholar]
- Liu, Z.; Xia, N.; Du, Q. Application research of spacecraft electrical power system digital accompanying flight technology. Spacecr. Eng. 2020, 29, 135–141. [Google Scholar]
- Liu, Y.; Xie, Q. Technical Characteristics of Digital Twins and Application Prospects in the Field of Flight Testing. J. Syst. Simul. 2021, 33, 1364. [Google Scholar]
- Yan, L.; Quande, L. Design of unmanned aerial vehicle flight simulation platform. Sci. Technol. Eng. 2022, 22, 12969–12976. [Google Scholar] [CrossRef]
- Guo, J.; Hong, H.; Zhong, K.; Liu, X.; Guo, Y. Production management and control method of aerospace manufacturing workshops based on digital twin. China Mech. Eng. 2020, 31, 808. [Google Scholar]
- Jiang, C.; Haibo, W.; Yixiao, Z.; Quanfeng, L. 3D real-time monitoring system of workshop operation for digital twinning. Mod. Manuf. Eng. 2023, 511, 21. [Google Scholar] [CrossRef]













Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.; Dang, Z.; Hei, X.; Wang, K. Design and Application of Logical Range Framework Based on Digital Twin. Appl. Sci. 2023, 13, 6589. https://doi.org/10.3390/app13116589
Chen H, Dang Z, Hei X, Wang K. Design and Application of Logical Range Framework Based on Digital Twin. Applied Sciences. 2023; 13(11):6589. https://doi.org/10.3390/app13116589
Chicago/Turabian StyleChen, Hao, Zheng Dang, Xinhong Hei, and Kai Wang. 2023. "Design and Application of Logical Range Framework Based on Digital Twin" Applied Sciences 13, no. 11: 6589. https://doi.org/10.3390/app13116589
APA StyleChen, H., Dang, Z., Hei, X., & Wang, K. (2023). Design and Application of Logical Range Framework Based on Digital Twin. Applied Sciences, 13(11), 6589. https://doi.org/10.3390/app13116589