
Numerical Study on the Influence of Coupling Beam Modeling on Structural Accelerations during High-Speed Train Crossings


Abstract
:1. Introduction
1.1. Multi-Body Dynamic Models
1.2. Simplified Model Alternatives
1.3. Objectives of Numerical Study
2. Materials and Methods
2.1. Mechanical Models of the Bridge Structures
2.2. Mechanical Models of the High-Speed Train
2.3. Parametric Analysis—Bridge Parameters
- Linear stiffness: = 50,000 kN/m2, = 100,000 kN/m2, = 200,000 kN/m2.
- Viscous damping: = 30 kNs/m2, = 60 kNs/m2, = 100 kNs/m2.
2.4. Parametric Analysis—Train Parameters
2.5. Parametric Analysis—Calculation and Evaluation Parameters
- V1-B1: Reference calculations with the MLM (V1) and the Bernoulli–Euler beam (B1) → 3330 parameter combinations.
- V2-B1: Calculations with the DIM (V2) and the Bernoulli–Euler beam (B1)—Consideration of vehicle–bridge interaction possible → 3330 parameter combinations.
- V1-B2: Calculations with the MLM (V1) and the coupling beam (B2)—Consideration of track–bridge interaction possible → 16,500 parameter combinations.
- V2-B2: Calculations with the DIM (V2) and the coupling beam (B2)—Consideration of vehicle–bridge and track–bridge interaction possible → 3330 parameter combinations.
3. Results
3.1. Investigation of an Exemplary Bridge Structure
3.1.1. Variation in Coupling Beam Parameters
3.1.2. Evaluation of Critical Train Speed
3.2. Investigations on a Parametric Field of Bridges
3.2.1. Acceleration Results of Reference Model
3.2.2. Influence of Modeling on Critical Train Speed
3.2.3. Influence of Modeling on Acceleration Peaks
4. Conclusions and Outlook
4.1. Statistical Analysis of Bridge Parameters
- Regarding existing concrete and filler beam structures, the average span is = 10.65 m, the average mass distribution is = 17.5 t/m, and the average fundamental bending frequency = 10.1 Hz. Combinations with spans ranging from 7 to 23 m and fundamental frequencies from 5 to 17 Hz, particularly for heavy to medium structures (μ1 to μ2), have a probability of occurrence greater than 50%.
- Regarding existing steel and composite structures, the average span is = 15.3 m, the average mass distribution is = 7.5 t/m, and the average fundamental bending frequency = 8.1 Hz. Parameter combinations with spans ranging from 10 to 31 m and fundamental frequencies from 4 to 13 Hz, particularly for structures with medium mass distribution (μ4), have a probability of occurrence greater than 50%.
4.2. Evaluation of Exemplary Bridge Structure
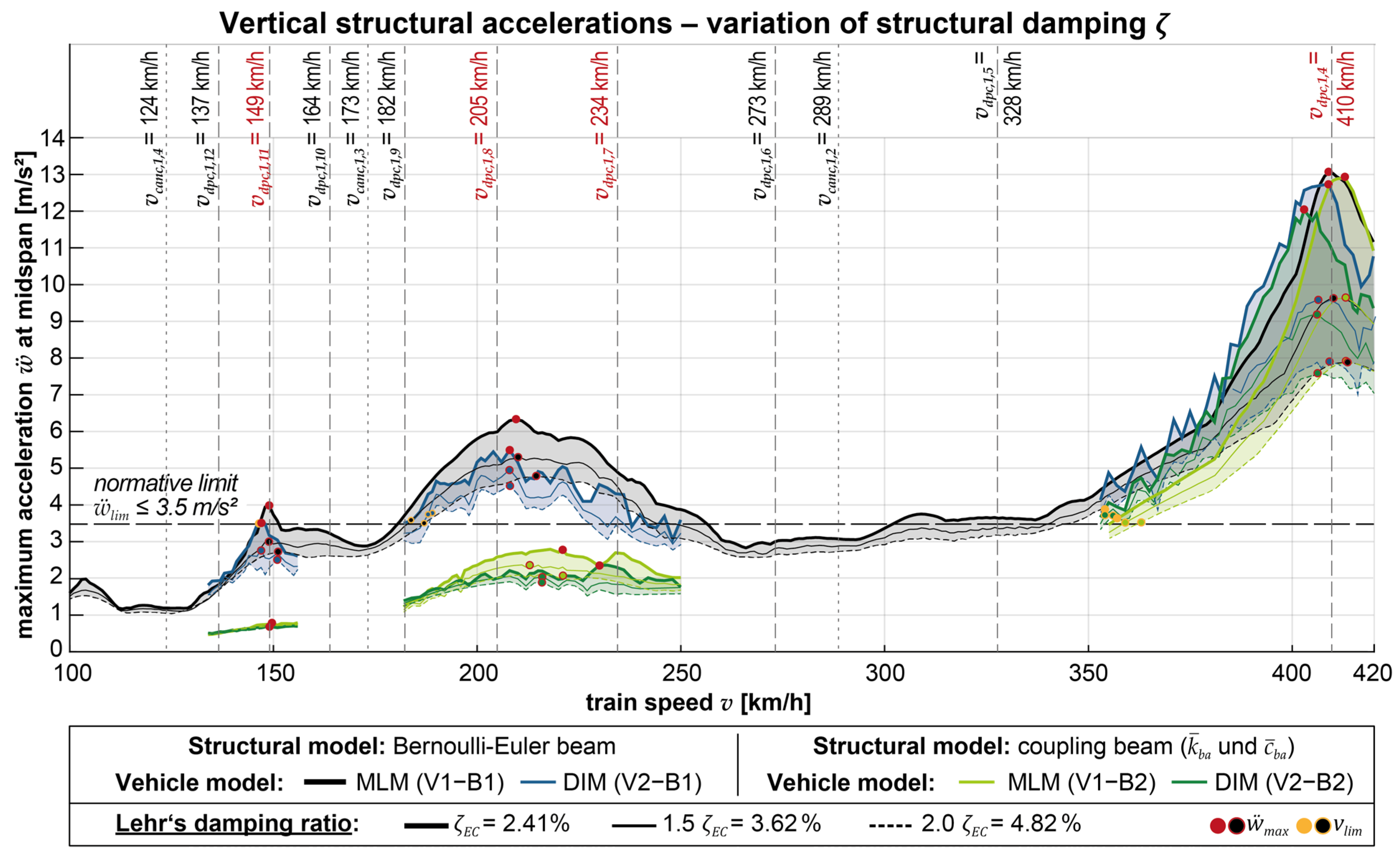
- The reference model (V1-B1) generally yields the highest acceleration values, which can be reduced to varying degrees by using one of the other models. Notably, the most complex model (V2-B2), which considers both track–bridge and vehicle–bridge interaction, consistently produces the lowest accelerations. When assessing the acceleration peak at the maximum train speed, which occurs within the range of the resonant speed vdpc,1,4 for this specific structure, the most substantial reduction can be achieved by employing the train’s multi-body model (DIM: V2–B1 and V2–B2). However, for acceleration peaks at lower train speeds (vdpc,1,8 and vdpc,1,11), the coupling beam model (V1-B2 and V2-B2, respectively) exerts a greater influence in reducing the acceleration results.
- Using the train’s multi-body model alone (V2-B1) leads to a shift in the acceleration peaks towards slightly lower train speeds due to the increase in the modal mass of the overall system caused by considering the train masses. Conversely, employing only the coupling beam model (V1-B2) tends to shift the acceleration peaks towards somewhat higher train speeds. Moreover, the influence of the coupling beam model results in more pronounced damping of acceleration peaks at lower train speeds compared to higher speeds. This effect allows acceleration peaks at higher train speeds, previously overshadowed in the reference model, to become more significant or decisive (see also Figure 9).
- Combining both model extensions in the V2-B2 model reveals an additive superposition of the computational benefits of both interaction effects. Specifically, the accelerations are reduced to a similar extent by applying the coupling beam model, regardless of the vehicle model used (see also Table 3, Table 4, Table 5 and Table 6). This implies that the influence of the coupling beam model on reducing accelerations remains consistent regardless of the specific characteristics of the vehicle model.
- When varying the underlying structural damping ζ (to the same extent in all models), the coupling beam model (V1-B2) demonstrates a similar effect on reducing accelerations (see also Figure 8 and Table 4). However, solely employing the more complex vehicle model (V2-B1) at higher underlying structural accelerations results in a less achievable reduction compared to cases with normatively lower bound damping (ζ1 = ζEC). In other words, the coupling beam model consistently contributes to reducing accelerations regardless of the damping level, whereas the sole application of the more complex vehicle model is less effective in reducing accelerations when the underlying structural accelerations are higher than the normative damping would suggest.
- Varying the coefficients of the ballast bed damping while using the coupling beam model shows only marginal deviation in the resulting influence on accelerations (see also Table 6). This indicates that the ballast bed damping has no noticeable impact on the influence of the coupling beam model on structural accelerations within the considered range of variation.
- When the spring stiffness of the ballast bed is varied while utilizing the coupling beam model, a significant influence on computed acceleration reductions is observed (see also Figure 9 and Table 5). Specifically, a lower applied ballast stiffness is associated with a higher reduction in acceleration.
- The evaluation of speeds vlim, at which the calculated structural acceleration exceeds the acceleration limit of ẅmax = 3.5 m/s2 specified by the standard, reveals a significant potential for the coupling beam model to assess high-speed train crossings as computationally uncritical. For the exemplary structure, regardless of the specific parameters applied to the coupling stiffness , coupling damping , structural damping ζ, and vehicle model (MLM or DIM), the coupling beam model allows for train speeds exceeding 350 km/h without exceeding the acceleration limit (see also Table 7). In contrast, the reference model predicts a first-time exceedance of the acceleration limit at speeds below 150 km/h. Additionally, applying the DIM (V2-B1) alone does not significantly influence the limit speed achieved with the reference model (V1-B1) for this specific exemplary structure.
4.3. Evaluation of Parametric Field of Bridges
- Critical accelerations, which substantially exceed the normative limit value, tend to occur more frequently as the structures’ mass distribution and span length decrease (see also Figure 10). This is particularly prominent in the case of steel and composite structures, where nearly all parameter combinations with a probability of occurrence exceeding 50% are affected by excessive structural accelerations when the reference model is applied (within the considered speed range).
- When considering the critical speed vlim, it is observed that for a relatively large proportion of the concrete and filler beam structures, with a probability of occurrence exceeding 50% (and approximately 62% of all structures), critical accelerations only occur at train crossing speeds above 250 km/h (see also Figure 11 and Figure 15). The median critical speeds range from 268–296 km/h, with a weighted range of 288–326 km/h (see Figure 16). Consequently, these structures can be identified as dynamically uncritical without any issues (at least when considering the Railjet in the standard configuration), even when using the reference model V1-B1. Lower critical speeds are only observed for structures with lower mass distributions, shorter spans, and lower fundamental bending frequencies.
- In contrast, assessing steel and composite structures as dynamically uncritical using the reference model V1-B1 is rarely possible above speeds of 250 km/h (see Figure 11 and Figure 16). Almost all structures experience high maximum accelerations at relatively low speeds. The median critical speeds range from 133–230 km/h, with a weighted range of 161–231 km/h for these structures (see Figure 16).
- Only minor increases in maximum crossing speeds vlim can be achieved for concrete and filler beam structures when utilizing only the more complex multi-body model of the train in the V2-B1 model (the median critical speeds range from 287–295 km/h, with a weighted range of 319-322 km/h, see Figure 12 and Figure 16). However, significant increases in maximum crossing speeds are attainable for steel and composite structures (the median critical speeds range from 204–262 km/h, with a weighted range of 228–271 km/h, see Figure 16). Notably, for structures with spans L > 15 m, the V2-B1 model has a highly favorable effect compared to the reference model. Nevertheless, it should be noted that there is a considerable scatter of results, and a relatively high proportion of 19.5% of structures still exhibit problematic accelerations at speeds below 150 km/h (see Figure 15).
- The sole application of the two-layer coupling beam model results in significant increases in critical crossing speeds vlim for all types of structures or mass distributions (see Figure 13, Figure 15 and Figure 16). The median critical speeds for concrete and filler beam structures range from 299–337 km/h, with a weighted range of 304–333 km/h. Similarly, the median critical speeds for steel and composite structures range from 189–271 km/h, with a weighted range of 189–241 km/h. The increment of critical train speed is particularly pronounced for structures with smaller spans L, specifically those below 15 m. When considering parameter combinations with a probability of occurrence exceeding 50%, the favorable impact of the coupling beam model in V1-B2 is similar to or slightly less pronounced than the influence achieved by using the DIM model alone through V2-B1.
- Once again, the beneficial effects of considering the interaction dynamics are further amplified when both the DIM and the coupling beam model are combined in the V2-B2 model (see Figure 14, Figure 15 and Figure 16). As a result, critical accelerations at crossing speeds vlim < 250 km/h are only observed for a smaller proportion of particularly light steel and composite structures. Only 3.2% of all concrete and filler beam structures and 34% of all steel and composite structures experience acceleration peaks below 250 km/h that exceed the normative limit. The median critical speeds vlim for concrete and filler beam structures range from 323–344 km/h, with a weighted range of 324–351 km/h. The median critical speeds for steel and composite structures range from 219–300 km/h, with a weighted range of 238–274 km/h.
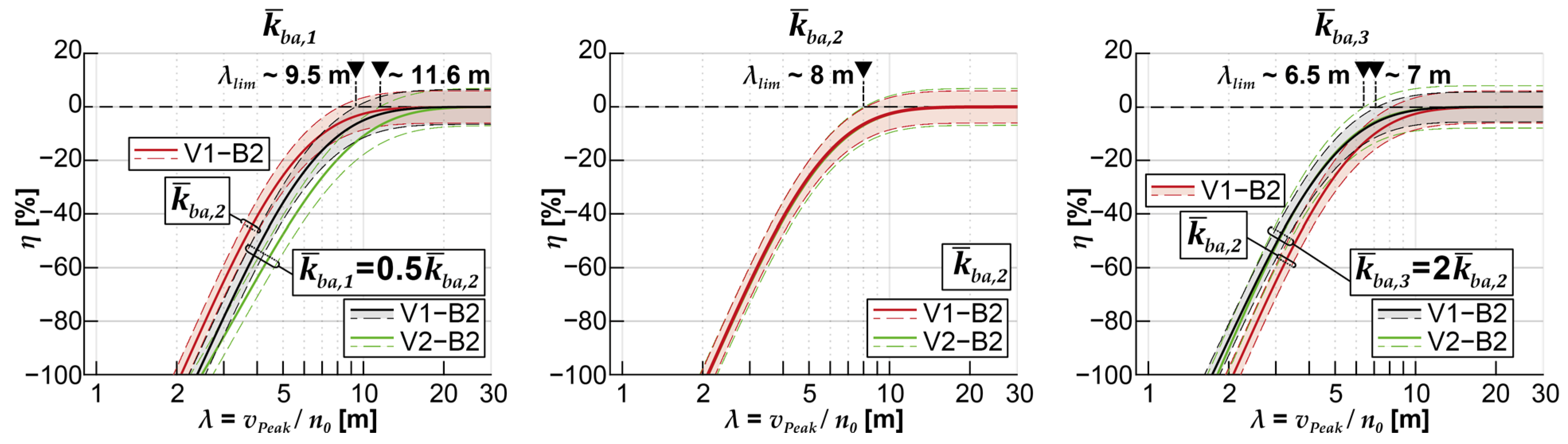
- The influence of the coupling beam model (V1-B2) on the maximum acceleration peaks of the reference model (V1-B1) exhibits a clear dependence on the normalized crossing speed at which it occurs (see Figure 17). Larger reductions in acceleration can be expected as the normalized speeds decrease. This relationship can be accurately described by an exponential (weighted) regression function, which has a high predictive probability. The reduction in acceleration peaks approaches zero at a normalized speed of approximately 13.2 m. At higher normalized speeds, the results tend to scatter significantly; in some cases, even an increase in acceleration peaks can occur. The upper 95% confidence limit for predicting new observations can be considered reliable within a range of normalized speeds from 2.5 to 8 m. With medium coupling stiffness, the reference model’s calculated acceleration results can be reduced within this range from 0% to −77%.
- In contrast to the coupling beam model (V1-B2), the sole application of the vehicle model DIM (V2-B1) does not exhibit a clear dependence between the percentage reduction in the maximum acceleration peaks and the normalized train speed at which they occur (see Figure 18). Therefore, a regression function of the same form cannot be provided. However, it can be observed that low mass distributions and large ratios of span to structural damping tend to favor a stronger influence of the DIM. In general, as the mass occupancy decreases, the magnitude of acceleration reduction increases. In the maximum case, the reduction can reach up to −75%.
- The comparison between the acceleration reduction achieved by using the coupling beam model and the DIM (V2-B2) versus applying the DIM alone (V2-B1) shows similar results to the comparison with the MLM for the vehicle (see Figure 17 and Figure 19). This indicates that the beneficial impact of the coupling beam model is mainly independent of the specific vehicle model used. In other words, regardless of whether the multi-body model or the MLM is employed, including the coupling beam model consistently leads to favorable acceleration reductions.
- The achievable acceleration reductions strongly depend on the ballast bed stiffness of the coupling beam model (V1-B2 and V2-B2, see Figure 20, Figure 21 and Figure 22). Lower coupling stiffnesses are associated with more significant reductions in the acceleration peaks of V1-B1. It is worth noting that the regression functions determined for the different vehicle models, DIM (V2-B2) and MLM (V1-B2), may exhibit some deviation, particularly in the case of the lowest coupling stiffness .
- The variation in the ballast bed damping coefficient and structural damping ζ has only marginal effects on the regression functions derived from the results of the entire parameter field, analogously to the exemplary structure (see Figure 22). This observation suggests that a more precise variation in these two parameters may not be necessary for future investigations aiming to describe the influence of coupling beam modeling. It implies that a more generalized approach can be applied, where specific variations in coupling and structural damping can be omitted without significantly compromising the accuracy of the results.
4.4. Limitations of Numerical Study
- Bearing Conditions: As mentioned in Section 2.1, only beam-like structures with hinged bearings and no skewness are considered in 2D modeling in the scope of the study presented here. Thus, lateral or torsional vibrations cannot be reproduced. In addition, the bearing conditions, e.g., the vertical flexibility of the bridge bearings, their rotational stiffness, or possible bearing dampers to reproduce the damping capacity resulting from soil–structure interaction, play a significant role regarding the amplitude of calculable structural accelerations and the critical resonance train speeds. However, the mathematical formulation of the equation of motion of the structure used in the investigations presented here does not allow for implementing other support conditions; for this, models discretized based on finite beam elements are better suited.Frame structures are of particular importance due to their increased use in the shorter span range. In [55], about 400 bridge structures in the Austrian railway network were investigated, of which about 50% can be classified as single-span beam bridges and 35% as frame structures. The more than 1000 bridges in the Swedish railway network with mainly short spans below 12 m studied in [56] consist of about 43% beam and 48% frame bridges. Due to the usually higher natural frequencies of the frame bridges than beamlike bridges, the influence of the load distribution is expected to have a correspondingly strong effect on the calculated accelerations. The accelerations in the bridge span of a frame bridge can be reproduced by modeling it with rotational restraint of the bridge bearings, e.g., by considering a rotational spring that reproduces the clamping effect. However, implementing a realistic torsional spring stiffness to represent the frame action requires much additional information regarding the structure geometry, the subsoil, and the backfill, whose stiffness significantly affects the restraint action of the bearing walls (see, amongst others, in [57,58,59,60]).With the purpose of finding a model as simple as possible and dependent on few parameters, which nevertheless does not exceed the actual structure vibrations in the dimension as the simple reference model, and in favor of a computationally efficient mathematic discretization and programming implementation required for the execution of broad parameter studies, it was renounced to include a more exact implementation of varying support conditions in the study. It is assumed that frame bridges behave like beam bridges of higher natural frequencies and that the influence of the coupling beam modeling affects the respective bridge structure under consideration independently of the bearing conditions. This assumption also needs to be confirmed by further investigations, for example, based on finite bar element modeling.
- 2.
- Track irregularities: The condition of the rails and wheelsets can be taken into account by implementing track irregularities in the loading vectors acting on the train and on the track grid, whereby this is only possible if the train is modeled as a multi-body system, and not if the MLM is used. In the case of poor track conditions, these irregularities can have an unfavorable influence on the results of dynamic calculations, especially on the vehicle accelerations, lateral structural vibrations, and contact forces between rail and wheelsets. On the other hand, studies in [24,37,61,62,63,64,65,66], among others, show that the influence on the vertical structure accelerations is small to negligible, particularly when the irregularities are modeled as a randomized power spectral density function, which could be due to the much higher frequency range in which the vibrations due to track irregularities occur. Nevertheless, this makes applying the coupling beam model in analyses with consideration of track irregularities an interesting research question to be further investigated.
- 3.
- Shear stiffness: The differential equation of the bending line of the Bernoulli–Euler beam used here does not include terms to account for shear stiffness or rotational inertia, as, for example, modeling as a Timoshenko beam would allow. Studies in [3,4,67,68] show that the influence of the rotational inertia on the natural frequency of a Timoshenko beam compared to the Bernoulli–Euler beam is much smaller than that of the shear stiffness. In addition, however, it can also be noted that the influence of both aspects on beams with a span-to-height ratio L/H above 10 generally has only a minor effect on the low-order natural frequencies. Especially for structures with spans below 10 m, the L/H ratio can be lower than 10, which is why for such cases, as well as for structures with high shear compliance (e.g., truss bridges), shear-soft modeling is recommended to obtain realistic vibration results. As with the previously mentioned aspects, the significance of the results obtained from the presented study is yet to be confirmed.
4.5. Final Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
- Vehicle:
- Rail beam:
- Supporting structure beam:
- Vehicle–Rail interaction:
References
- EN 1990:2002/A1:2005/AC:2010; Eurocode—Basis of Structural Design. CEN European Committee for Standardization: Brussels, Belgium, 2021.
- Adam, C.; Salcher, P. Dynamic effect of high-speed trains on simple bridge structures. Struct. Eng. Mech. 2014, 51, 581–599. [Google Scholar] [CrossRef]
- Frýba, L.; Kadecka, S.; ICE Virtual Library. Dynamics of Railway Bridges; Telford, T., Ed.; Publications Sales Department, American Society of Civil Engineers: New York, NY, USA; London, UK, 1996. [Google Scholar]
- Mähr, T.C. Theoretische und Experimentelle Untersuchungen zum Dynamischen Verhalten von Eisenbahnbrücken mit Schotteroberbau unter Verkehrslast. Ph.D. Thesis, Technische Universtität Wien, Vienna, Austria, 2009. [Google Scholar]
- Yang, Y.-B.; Yau, J.-D.; Hsu, L.-C. Vibration of simple beams due to trains moving at high speeds. Eng. Struct. 1997, 19, 936–944. [Google Scholar] [CrossRef]
- Yang, Y.B.; Yau, J.D.; Wu, Y.S. Vehicle-Bridge Interaction Dynamics: With Applications to High-Speed Railways; World Scientific: River Edge, NJ, USA; London, UK, 2004. [Google Scholar]
- Yang, Y.; Lin, C. Vehicle–bridge interaction dynamics and potential applications. J. Sound Vib. 2005, 284, 205–226. [Google Scholar] [CrossRef]
- Bruschetini-Ambro, S.-Z.; Fink, J.; Lachinger, S.; Reiterer, M. Ermittlung der Dynamischen Kennwerte von Eisenbahnbrücken unter Anwendung von Unterschiedlichen Schwingungsanregungsmethoden. Bauingenieur 2017, 92, S2–S13. [Google Scholar]
- Reiterer, M.; Bruschetini-Ambro, S.-Z. Dynamik von Eisenbahnbrücken: Diskrepanz zwischen Messung und Berechnung. Bauingenieur 2019, 94, 9–21. [Google Scholar] [CrossRef]
- Vospernig, M.; Reiterer, M. Evaluierung der dynamischen Systemeigenschaften von einfeldrigen Stahlbeton-Eisenbahnbrücken: Messtechnische Bestimmung der dynamischen Kennwerte für zwei Versuchsbrücken im gerissenen und ungerissenen Zustand bei unterschiedlichen Ausbauzuständen. Beton-Und Stahlbetonbau 2020, 115, 424–437. [Google Scholar] [CrossRef]
- Martínez, E.; de Ulzurrun Casals, G.S.-D.; Zanuy, C. Influence of track typology on the dynamic response of short-span high-speed railway bridges. Hormigón y Acero 2023, in press. [Google Scholar]
- Bonopera, M.; Chang, K.; Chen, C.; Sung, Y.; Tullini, N. Experimental study on the fundamental frequency of prestressed concrete bridge beams with parabolic unbonded tendons. J. Sound Vib. 2019, 455, 150–160. [Google Scholar] [CrossRef]
- Noble, D.; Nogal, M.; O׳Connor, A.; Pakrashi, V. The effect of prestress force magnitude and eccentricity on the natural bending frequencies of uncracked prestressed concrete beams. J. Sound Vib. 2016, 365, 22–44. [Google Scholar] [CrossRef]
- Chordà-Monsonís, J.; Romero, A.; Moliner, E.; Galvín, P.; Rodrigo, M. Ballast shear effects on the dynamic response of railway bridges. Eng. Struct. 2022, 272, 114957. [Google Scholar] [CrossRef]
- Stollwitzer, A.; Bettinelli, L.; Fink, J. The longitudinal track-bridge interaction of ballasted track in railway bridges: Experimental determination of dynamic stiffness and damping characteristics. Eng. Struct. 2023, 274, 115115. [Google Scholar] [CrossRef]
- Stollwitzer, A.; Fink, J. Mathematical calculation of the damping value of steel railway bridges—Part I: Theoretical background (in German). Stahlbau 2021, 90, 305–315. [Google Scholar] [CrossRef]
- Stollwitzer, A.; Fink, J. Mathematical calculation of the damping value of steel railway bridges—Part II: Verification on the basis of existing bridges. Stahlbau 2021, 90, 449–462. (In German) [Google Scholar] [CrossRef]
- Arvidsson, T.; Karoumi, R.; Pacoste, C. Statistical screening of modelling alternatives in train–bridge interaction systems. Eng. Struct. 2014, 59, 693–701. [Google Scholar] [CrossRef]
- Domenech, A.; Museros, P. Influence of the vehicle model on the response of high-speed railway bridges at resonance. Analysis of the Additional Damping Method prescribed by Eurocode 1. In Proceedings of the 8th International Conference on Structural Dynamics, Eurodyn 2011, Leuven, Belgium, 4–6 July 2011; pp. 1273–1280. [Google Scholar]
- Doménech, A.; Museros, P.; Rodrigo, M. Influence of the vehicle model on the prediction of the maximum bending response of simply-supported bridges under high-speed railway traffic. Eng. Struct. 2014, 72, 123–139. [Google Scholar] [CrossRef]
- Glatz, B.; Fink, J. Influence of the calculation models on the dynamic response of 75 steel, composite and concrete bridges. Stahlbau 2019, 88, 470–477. (In German) [Google Scholar] [CrossRef]
- Glatz, B.; Fink, J. A redesigned approach to the additional damping method in the dynamic analysis of simply supported railway bridges. Eng. Struct. 2021, 241, 112415. (In German) [Google Scholar] [CrossRef]
- Liu, K.; De Roeck, G.; Lombaert, G. The effect of dynamic train–bridge interaction on the bridge response during a train passage. J. Sound Vib. 2009, 325, 240–251. [Google Scholar] [CrossRef]
- Cantero, D.; Arvidsson, T.; OBrien, E.; Karoumi, R. Train–track–bridge modelling and review of parameters. Struct. Infrastruct. Eng. 2016, 12, 1051–1064. [Google Scholar] [CrossRef]
- European Rail Research Institute. ERRI D 214/RP9, Rail Bridges for Speeds >200 km/h; Final Report Part A: Synthesis of the Results of D 214 Research. Part B: Proposed UIC Leaflet; European Rail Research Institute: Utrecht, The Netherlands, 1999. [Google Scholar]
- Rigueiro, C.; Rebelo, C.; da Silva, L.S. Influence of ballast models in the dynamic response of railway viaducts. J. Sound Vib. 2010, 329, 3030–3040. [Google Scholar] [CrossRef]
- Stollwitzer, A.; Fink, J. Damping parameters of ballasted track on railway bridges—Part I: Vertical relative displacements in the ballast. Bautechnik 2021, 98, 465–474. (In German) [Google Scholar]
- Stollwitzer, A.; Fink, J. Damping parameters of ballasted track on railway bridges—Part II: Energy dissipation in the ballasted track and related calculation model (in German). Bautechnik 2021, 98, 552–562. (In German) [Google Scholar]
- Andersson, C.; Oscarsson, J. Dynamic Train/Track Interaction Including State–Dependent Track Properties and Flexible Vehicle Components. Veh. Syst. Dyn. 1999, 33, 47–58. [Google Scholar] [CrossRef]
- Kouroussis, G.; Verlinden, O.; Conti, C. Influence of some vehicle and track parameters on the environmental vibrations induced by railway traffic. Veh. Syst. Dyn. 2012, 50, 619–639. [Google Scholar] [CrossRef]
- Kouroussis, G.; Verlinden, O. Prediction of railway induced ground vibration through multibody and finite element modelling. Mech. Sci. 2013, 4, 167–183. [Google Scholar] [CrossRef]
- Lei, X.; Zhang, B. The Influence of Track Stiffness Distribution on Dynamic Behavior of Track Transition. ASME/IEEE Jt. Rail Conf. 2011, 54594, 173–180. [Google Scholar] [CrossRef]
- Lombaert, G.; Degrande, G.; Kogut, J.; François, S. The experimental validation of a numerical model for the prediction of railway induced vibrations. J. Sound Vib. 2006, 297, 512–535. [Google Scholar] [CrossRef]
- Lou, P.; Yu, Z.W.; Au, F.T.K. Rail-bridge coupling element of unequal lengths for analysing train-track-bridge interaction systems. Appl. Math. Model. 2012, 36, 1395–1414. [Google Scholar]
- Lou, P. Finite element analysis for train–track–bridge interaction system. Arch. Appl. Mech. 2007, 77, 707–728. [Google Scholar]
- Moliner, E.; Martínez-Rodrigo, M.D.; Galvín, P.; Monsonís, J.C.; Romero, A. On the vertical coupling effect of ballasted tracks in multi–span simply–supported railway bridges under operating conditions. Struct. Infrastruct. Eng. 2022, 1–23. [Google Scholar] [CrossRef]
- Nguyen, K.; Goicolea, J.; Galbadón, F. Comparison of dynamic effects of high-speed traffic load on ballasted track using a simplified two-dimensional and full three-dimensional model. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2014, 228, 128–142. [Google Scholar] [CrossRef]
- Saramago, G.; Montenegro, P.A.; Ribeiro, D.; Silva, A.; Santos, S.; Calçada, R. Experimental Validation of a Double-Deck Track-Bridge System under Railway Traffic. Sustainability 2022, 14, 5794. [Google Scholar] [CrossRef]
- Young, T.; Li, C. Vertical Vibration Analysis of Vehicle/Imperfect Track Systems. Veh. Syst. Dyn. 2003, 40, 329–349. [Google Scholar] [CrossRef]
- EN 1991-2:2003/AC:2010; Eurocode 1: Actions on Structures—Part 2: Traffic Loads on Bridges. CEN European Committee for Standardization: Brussels, Belgium, 2010.
- prEN 1991-2:2021; Eurocode 1: Actions on Structures—Part 2: Traffic Loads on Bridges and other Civil Engineering Works. CEN European Committee for Standardization: Brussels, Belgium, 2021.
- RW 08.01.04Dynamische Berechnung von Eisenbahnbrücken, Anhang 1: Zugdefinitionen; ÖBB-Infrastruktur AG: Vienna, Austria, 2022.
- Petersen, C.; Werkle, H. Dynamik der Baukonstruktionen, 2nd ed.; Springer Vieweg Wiesbaden: Wiesbaden, Germany, 2017. [Google Scholar]
- Museros, P.; Alarcón, E. Influence of the Second Bending Mode on the Response of High-Speed Bridges at Resonance. J. Struct. Eng. 2005, 131, 405–415. [Google Scholar] [CrossRef]
- Yang, Y.-B.; Yau, J.-D. Vehicle-Bridge Interaction Element for Dynamic Analysis. J. Struct. Eng. 1997, 123, 1512–1518. [Google Scholar] [CrossRef]
- Weber, W. Computationally Efficient Simulation Program for the Dynamic Analysis of Railway Bridges using Multi-Body Models and Trigonometric Shape Functions. Diploma Thesis, Technische Universtität Wien, Vienna, Austria, 2009. (In German). [Google Scholar]
- The Mathworks Inc. MATLAB 2022; The Mathworks Inc.: Natick, MA, USA, 2022. [Google Scholar]
- Shampine, L.F.; Reichelt, M.W. The MATLAB ODE Suite. SIAM J. Sci. Comput. 1997, 18, 1–22. [Google Scholar] [CrossRef]
- European Rail Research Institute. ERRI D 214/RP3, Rail Bridges for Speeds >200 km/h; Recommendations for Calculating Damping in Rail Bridge Decks; European Rail Research Institute: Utrecht, The Netherlands, 1999. [Google Scholar]
- European Rail Research Institute. ERRI D 214/RP8, Rail Bridges for Speeds >200 km/h; Confirmation of Values Against Experimental Data. Part A: Rig Tests to Investigate Ballast Behaviour on Bridges due to High Acceleration Levels Confirmation of the Acceleration Limit for the Ballast. Part B: Comparison of Calculations and Measurements usi; European Rail Research Institute: Utrecht, The Netherlands, 1999. [Google Scholar]
- Rauert, T.; Bigelow, H.; Hoffmeister, B.; Feldmann, M.; Patz, R.; Lippert, P. On the influence of constructional elements on the dynamic behaviour of filler beam railway bridges (in German). Bautechnik 2010, 87, 665–672. [Google Scholar] [CrossRef]
- Glatz, B.; Bettinelli, L.; Fink, J. Power cars and vehicle-bridge-interaction in the dynamic calculation of railway bridges (in German). Bautechnik 2020, 97, 453–461. [Google Scholar] [CrossRef]
- Kotz, S.; Balakrishnan, N.; Johnson, N.L. Continuous Multivariate Distributions, Volume 1: Models and Applications; John Wiley & Sons: New York, NY, USA, 2004; Volume 1. [Google Scholar]
- Bruckmoser, B. Investigation of the Load-Distributing Effect of the Ballast Bed in Simulations of Railway Bridge Vibrations (in German). Diploma Thesis, Technische Universtität Wien, Vienna, Austria, 2009.
- Unterweger, H.; Taras, A.; Schörghofer, A. Bestandsbrücken im Hochgeschwindigkeitsnetz-Vorgehensweise und Auswahl Maßgebender Brücken bei Einfeldtragwerken; Graz University of Technology: Graz, Austria, 2015. [Google Scholar]
- Johansson, C.; Nualláin, N.; Pacoste, C.; Andersson, A. A methodology for the preliminary assessment of existing railway bridges for high-speed traffic. Eng. Struct. 2014, 58, 25–35. [Google Scholar] [CrossRef]
- Heiland, T.; Aji, H.D.; Wuttke, F.; Stempniewski, L.; Stark, A. Influence of soil-structure interaction on the dynamic characteristics of railroad frame bridges. Soil Dyn. Earthq. Eng. 2023, 167, 107800. [Google Scholar] [CrossRef]
- Ülker-Kaustell, M.; Karoumi, R.; Pacoste, C. Simplified analysis of the dynamic soil–structure interaction of a portal frame railway bridge. Eng. Struct. 2010, 32, 3692–3698. [Google Scholar] [CrossRef]
- Zangeneh, A. Dynamic Soil-Structure Interaction Analysis of Railway Bridges: Numerical and Experimental Results. Licenciate Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, 2018. [Google Scholar]
- Zangeneh, A. Dynamic Soil-Structure Interaction Analysis of High-Speed Railway Bridges: Efficient Modeling Techniques and Experimental Testing. Ph.D. Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, 2021. [Google Scholar]
- Dinh, V.N.; Du Kim, K.; Warnitchai, P. Dynamic analysis of three-dimensional bridge–high-speed train interactions using a wheel–rail contact model. Eng. Struct. 2009, 31, 3090–3106. [Google Scholar] [CrossRef]
- Lei, X.; Noda, N.A. Analyses of dynamic response of vehicle and track coupling system with random irregularity of track vertical profile. J. Sound Vib. 2002, 258, 147–165. [Google Scholar] [CrossRef]
- Lou, P.; Zeng, Q.-Y. Formulation of Equations of Motion for a Simply Supported Bridge under a Moving Railway Freight Vehicle. Shock. Vib. 2007, 14, 429–446. [Google Scholar] [CrossRef]
- Majka, M.; Hartnett, M. Dynamic response of bridges to moving trains: A study on effects of random track irregularities and bridge skewness. Comput. Struct. 2009, 87, 1233–1252. [Google Scholar] [CrossRef]
- Peixer, M.; Montenegro, P.; Carvalho, H.; Ribeiro, D.; Bittencourt, T.; Calçada, R. Running safety evaluation of a train moving over a high-speed railway viaduct under different track conditions. Eng. Fail. Anal. 2020, 121, 105133. [Google Scholar] [CrossRef]
- Wu, Y.-S.; Yang, Y.-B.; Yau, J.-D. Three-Dimensional Analysis of Train-Rail-Bridge Interaction Problems. Veh. Syst. Dyn. 2001, 36, 1–35. [Google Scholar] [CrossRef]
- Huang, T.C. The Effect of Rotatory Inertia and of Shear Deformation on the Frequency and Normal Mode Equations of Uniform Beams With Simple End Conditions. J. Appl. Mech. 1961, 28, 579–584. [Google Scholar] [CrossRef]
- Timoshenko, S.; Young, D.H.; Weaver, W. Vibration Problems in Engineering, 4th ed.; Wiley: New York, NY, USA, 1974. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Concrete and Filler Beam Structures | Steel and Composite Structures | |||||
|---|---|---|---|---|---|---|
| μ1 | μ2 | μ3 | μ4 | μ5 | μ6 | |
| a | 0.843 | 0.7002 | 0.5584 | 0.1214 | 0.1214 | 0.1214 |
| b | 10.45 | 8.539 | 6.627 | 9.5174 | 5.918 | 2.1691 |
| Locomotive (loc) | Passenger Car (pc) | |
|---|---|---|
| Axle load Fstat [kN] | 215.6 | 148.4 |
| Car body mass mc [kg] | 51,500 | 47,316 |
| Car body moment of inertia Ic [kgm] | 882 × 103 | 307 × 104 |
| Bogie mass mb [kg] | 13,220 | 2800 |
| Bogie moment of inertia Ib [kgm] | 27,100 | 1700 |
| Wheelset mass mw [kg] | 2495 | 1900 |
| Length over buffer d [m] | 18.59 | 26.50 |
| Bogie axle distance r [m] | 9.90 | 19.00 |
| Wheelset distance b [m] | 3.00 | 2.50 |
| Primary suspension stiffness kp [kN/m] | 3680 | 1690 |
| Primary suspension damping cp [kNs/m] | 80 | 20 |
| Secondary suspension stiffness ks [kN/m] | 2720 | 280 |
| Secondary suspension damping cs [kNs/m] | 200 | 14 |
| V1-B1 | V2-B1 | V1-B2 | ηV1-B2/ ηV2-B2 | V2-B2 | ||
|---|---|---|---|---|---|---|
| vPeak~vdpc,1,4 | Train speed v [km/h] | 409 | 409 | 413 | - | 406 |
| Acceleration ẅmax [m/s2] | 13.0 | 12.7 | 12.9 | - | 11.9 | |
| Reduction η [%] | - | −2.4 | −1.0 | 0.12→ | −8.6 | |
| vPeak~vdpc,1,8/vdpc,1,7 | Train speed v [km/h] | 209 | 208 | 221 ** | - | 232 ** |
| Acceleration ẅmax [m/s2] | 6.3 | 5.5 | 2.8 | - | 2.4 | |
| Reduction η [%] | - | −12.9 | −55.9 | 0.89→ | −62.5 | |
| vPeak~vdpc,1,11 | Train speed v [km/h] | 149 | 147 | 149 * | - | 149 * |
| Acceleration ẅmax [m/s2] | 4.0 | 3.5 | 0.8 | - | 0.7 | |
| Reduction η [%] | - | −12.0 | −80.6 | 0.97→ | −82.7 |
| V1-B1 | V2-B1 | V1-B2 | ηV1-B2/ ηV2-B2 | V2-B2 | ||||
|---|---|---|---|---|---|---|---|---|
| vPeak~vdpc,1,4 | ζ1 = ζEC | ẅmax [m/s2] | 13.0 | η [%] | −2.4 | −1.0 | 0.12→ | −8.6 |
| ζ2 = 1.5 ζEC | 9.6 | −0.6 | 0.2 | −0.04→ | −4.4 | |||
| ζ3 = 2.0 ζEC | 7.9 | −0.2 | 0.2 | 0.04→ | −4.0 | |||
| vPeak~vdpc,1,8/vdpc,1,7 | ζ1 = ζEC | ẅmax [m/s2] | 6.3 | η [%] | −12.9 | −55.9 ** | 0.89→ | −62.5 ** |
| ζ2 = 1.5 ζEC | 5.3 | −6.1 | −55.2 | 0.90→ | −61.1 | |||
| ζ3 = 2.0 ζEC | 4.8 | −5.4 | −55.9 ** | 0.93→ | −60.0 | |||
| vPeak~vdpc,1,11 | ζ1 = ζEC | ẅmax [m/s2] | 4.0 | η [%] | −12.0 | −80.6 * | 0.97→ | −82.7 * |
| ζ2 = 1.5 ζEC | 3.0 | −7.7 | −75.7 * | 0.97→ | −77.7 * | |||
| ζ3 = 2.0 ζEC | 2.7 | −8.1 | −73.9 * | 0.98→ | −75.2 * |
| V1-B1 | V2-B1 | V1-B2 | ηV1-B2/ ηV2-B2 | V2-B2 | ||||
|---|---|---|---|---|---|---|---|---|
| vPeak~vdpc,1,4 | ẅmax [m/s2] | 13.0 | η [%] | −2.4 | −6.4 | 0.24→ | −27.4 | |
| −1.0 | 0.12→ | −8.6 | ||||||
| 1.4 | ~ | 0.0 | ||||||
| vPeak~vdpc,1,8/vdpc,1,7 | ẅmax [m/s2] | 6.3 | η [%] | −12.9 | −68.8 ** | 0.92→ | −75.1 ** | |
| −55.9 ** | 0.89→ | −62.5 ** | ||||||
| −42.3 ** | 0.85→ | −49.8 * | ||||||
| vPeak~vdpc,1,11 | ẅmax [m/s2] | 4.0 | η [%] | −12.0 | −87.0 | 0.99→ | −87.7 * | |
| −80.6 * | 0.97→ | −82.7 * | ||||||
| −72.2 * | 0.96→ | −75.0 * | ||||||
| = 50,000 kN/m2; = 100,000 kN/m2 = 200,000 kN/m2 | ||||||||
| V1-B1 | V2-B1 | V1-B2 | ηV1-B2/ηV2-B2 | V2-B2 | ||||
|---|---|---|---|---|---|---|---|---|
| vPeak~vdpc,1,4 | ẅmax [m/s2] | 13.0 | η [%] | −2.4 | −1.5 | 0.19 | −7.8 | |
| −1.1 | 0.12 | −8.6 | ||||||
| −1.3 | 0.15 | −8.9 | ||||||
| vPeak~vdpc,1,8/vdpc,1,7 | ẅmax [m/s2] | 6.3 | η [%] | −12.9 | −57.4 | 0.92 | −62.5 | |
| −55.9 ** | 0.89 | −62.5 ** | ||||||
| −55.6 | 0.89 | −62.7 | ||||||
| vPeak~vdpc,1,11 | ẅmax [m/s2] | 4.0 | η [%] | −12.0 | −80.3 | 0.97 | −82.8 | |
| −80.6 * | 0.97 | −82.7 * | ||||||
| −80.9 | 0.98 | −82.7 | ||||||
| = 30 kNs/m2; = 60 kNs/m2 = 100 kNs/m2 | ||||||||
| ζ | V1-B1 | V2-B1 | V1-B2 | V2-B2 | |||
|---|---|---|---|---|---|---|---|
| ζ1 = ζEC | vlim [km/h] | 147 | 147 | 357 | 354 | ||
| ζ2 = 1.5 ζEC | 184 | 188 | 359 | 354 | |||
| ζ3 = 2.0 ζEC | 187 | 189 | 363 | 356 | |||
| ζ1 = ζEC | vlim [km/h] | 147 | 147 | 359 | 354 | ||
| 357 | 354 | ||||||
| 205 | 352 | ||||||
| ζ1 = ζEC | vlim [km/h] | 147 | 147 | 357 | 348 | ||
| 357 | 354 | ||||||
| 357 | 354 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bettinelli, L.; Stollwitzer, A.; Fink, J. Numerical Study on the Influence of Coupling Beam Modeling on Structural Accelerations during High-Speed Train Crossings. Appl. Sci. 2023, 13, 8746. https://doi.org/10.3390/app13158746
Bettinelli L, Stollwitzer A, Fink J. Numerical Study on the Influence of Coupling Beam Modeling on Structural Accelerations during High-Speed Train Crossings. Applied Sciences. 2023; 13(15):8746. https://doi.org/10.3390/app13158746
Chicago/Turabian StyleBettinelli, Lara, Andreas Stollwitzer, and Josef Fink. 2023. "Numerical Study on the Influence of Coupling Beam Modeling on Structural Accelerations during High-Speed Train Crossings" Applied Sciences 13, no. 15: 8746. https://doi.org/10.3390/app13158746
APA StyleBettinelli, L., Stollwitzer, A., & Fink, J. (2023). Numerical Study on the Influence of Coupling Beam Modeling on Structural Accelerations during High-Speed Train Crossings. Applied Sciences, 13(15), 8746. https://doi.org/10.3390/app13158746