
A Framework of Modeling and Simulation Based on Swarm Ontology for Autonomous Unmanned Systems
Abstract
:1. Introduction
2. Related Works
2.1. Swarm Ontology
2.2. Model-Based Paradigm
2.3. Multiparadigm Modeling
2.4. Behavior-Based System for Autonomy
2.5. Digital Twins in an L-V-C Platform
2.6. The Taxonomy of the Methodologies/Methods
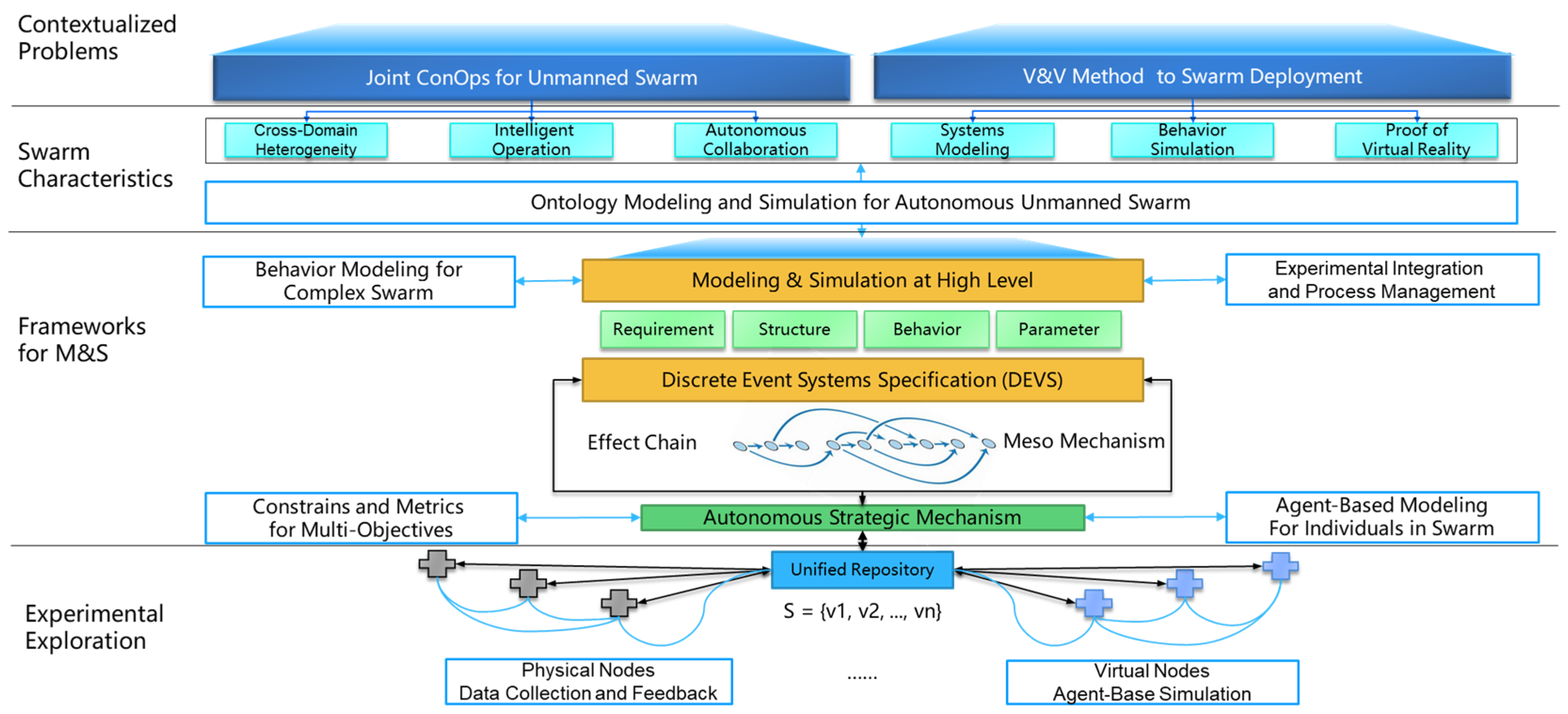
3. The Architecture Framework for Swarm M&S Based on Swarm Ontology
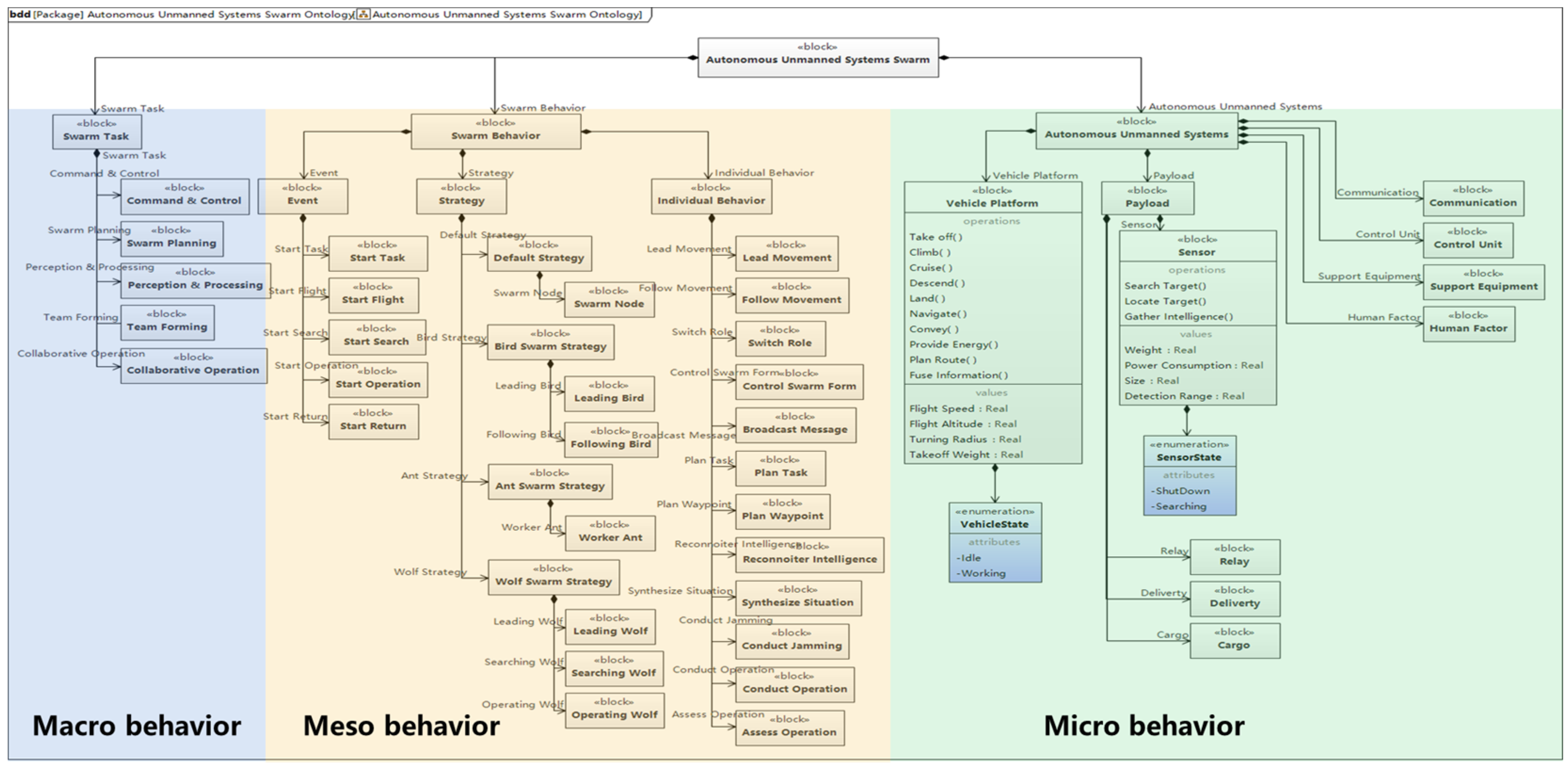
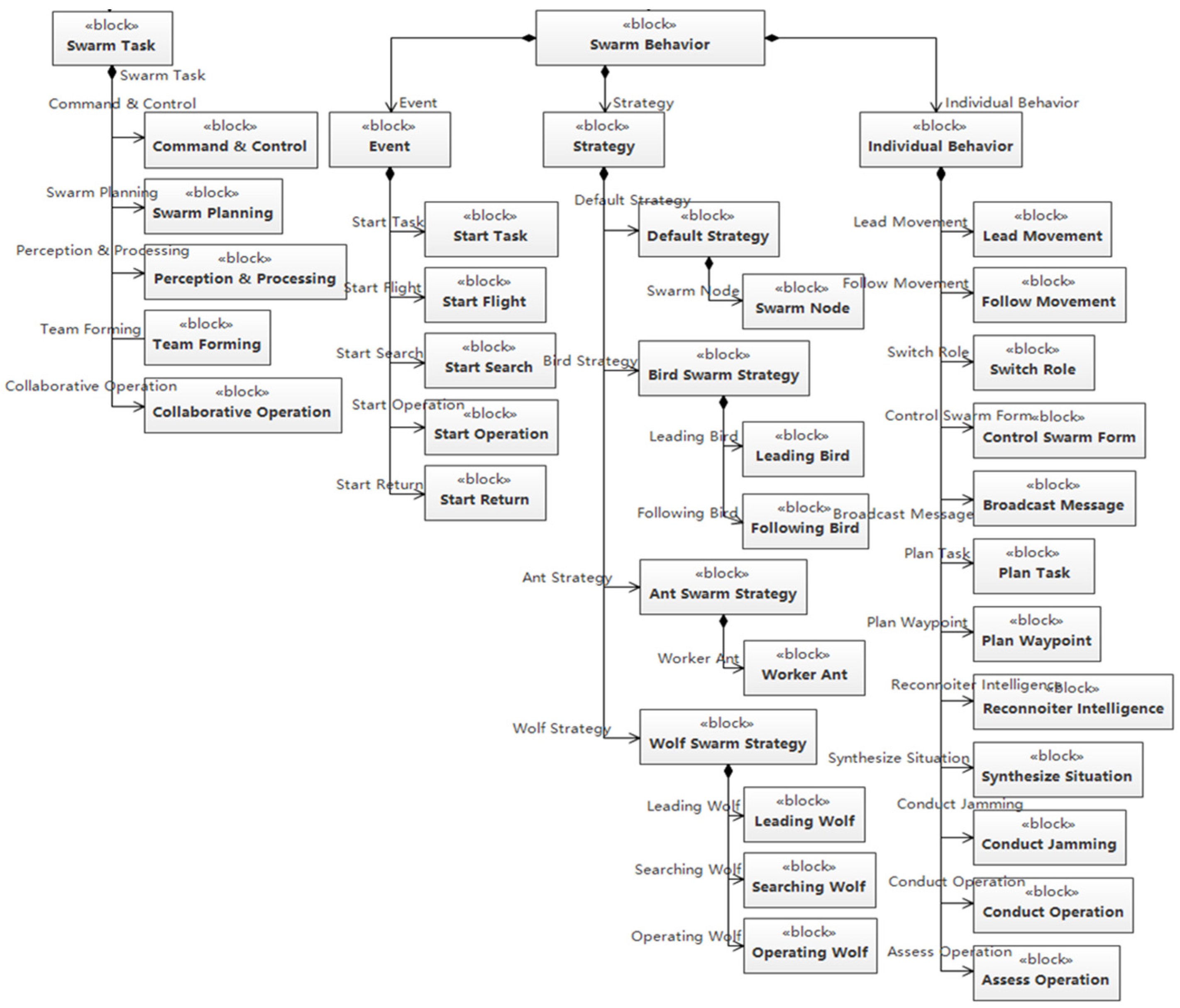
- Firstly, at the beginning of framing the problems in the complex context, the innovative ConOps of swarm and its novel capability requirements should be derived and deducted, and currently, we give full play to the integrated application advantages of Model-Driven Engineering (MDE) and Multi-Paradigm Modeling (MPM) to break through the traditional feature-based modeling function of Web Ontology Language (OWL) technology and Protégé 5.6.1 software to define a swarm ontology in a conceptual model based on System Modeling Language (SysML), which is more formal and executable. The swarm ontology with a descriptive form should support hierarchical model refinement and translation. From the top–down levels of abstraction, the macro-behavior presents the model of a swarm population, the meso-behavior presents the model of a group of individuals, and the micro-behaviors present the model of an individual. The meso-model is in between the individual and population levels [21]. To achieve explicit knowledge representation and logical reasoning throughout the three levels of macro–meso–micro, it will support the linkage of transition from the swarm overall characteristics to the system design features in the way of decomposition and breakdown, and then convey and map the component specifications in the development of unmanned systems.
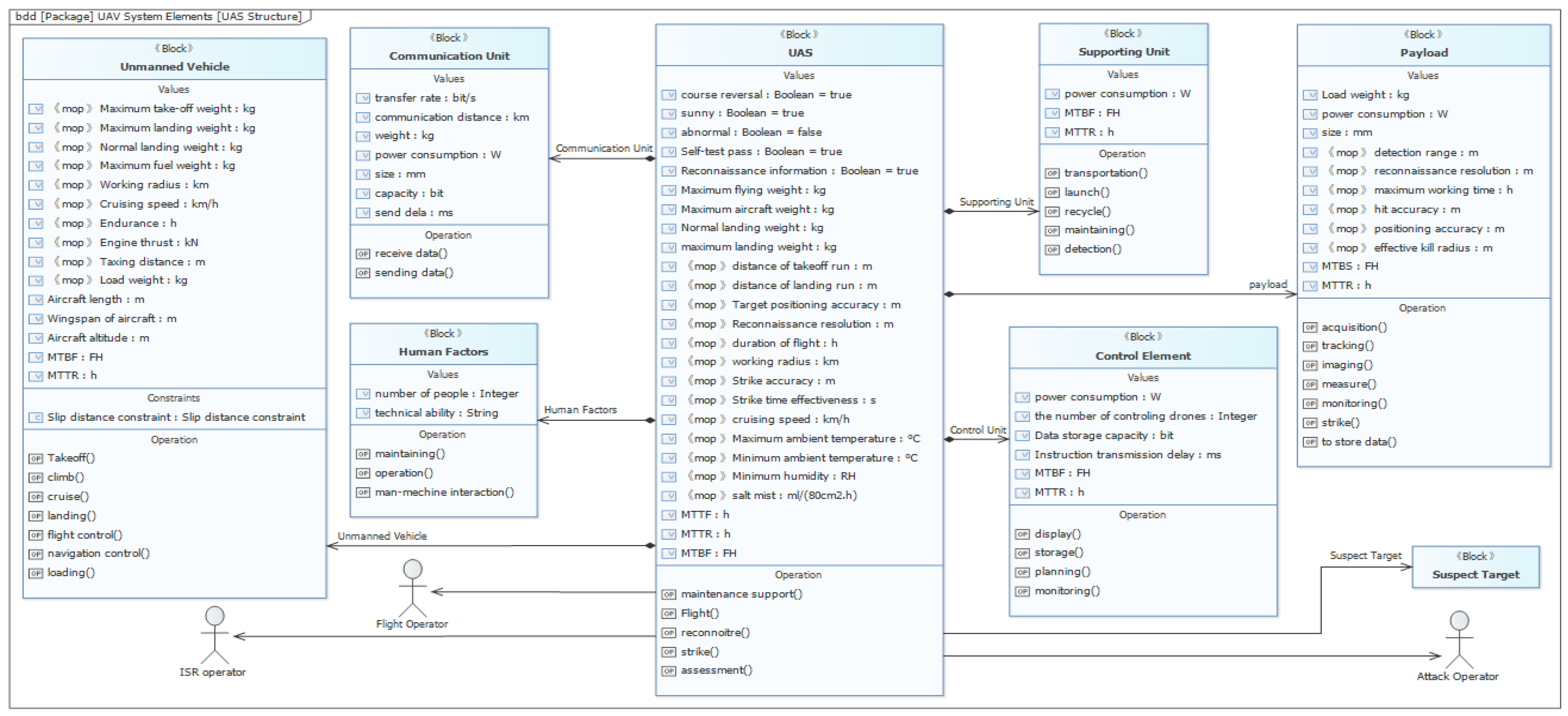
- With the application of the process and method of MBSE and the flexible extension mechanism in a system model based on SysML, we are particularly interested in the dominant features of intelligence, adaptability, and autonomy within heterogeneous unmanned systems in multiple domains (such as space, air, ground, sea, etc.) and dedicated to establishing a metamodel framework and its corresponding metamodeling process for those systems. Therefore, focusing on the functional and logical model (mainly by SysML) and the mathematical–physical model (mainly by Modelica), our approach further enhances the pattern of the domain-specific modeling language (DSML) and its integration framework (via the SysML Extension for Physical Interaction and Signal Flow Simulation, SysPhS for short, the specification from OMG) of general unmanned systems to define, develop, integrate, and verify the implementation under the use cases of vehicle maneuvers, autonomous control, information interconnection, mission coordination, and so on.
- For the application of the “Real” and “Virtual” nodes in a hybrid pattern to simulate a typical complex swarm scenario, we define the format of a Unified Repository (UR) for both the digital model (digital twin) and the physical entity in a common representation model of an unmanned system. In the current mature spatiotemporal information system, it embeds agent-based mathematical models and collects data about the movement, navigation, command and control, communication, etc., of the physical entity. We built a codesign and co-simulation environment which supports virtual/real mixing operations to visualize the overall and global swarm application and to verify and validate the conceptualization of autonomous unmanned swarm.
- And finally, considering the swarm ontology technology of autonomous unmanned systems as the main thread in our research, and across the conceptual ontological model–functional and logical model–mathematical physical model, we develop the technology of the integration environment of a multilevel and multiparadigm collaborative model and simulation, which will become a technical evolution platform of the experimental frame to support the development and evaluation of complex behaviors [24], such as swarm environment awareness and cognition, collaborative task planning and decision making, information interaction and autonomous control, and others. We take a hierarchical, composable approach to swarm development and the experimental framework is mainly composed of ConOps, capabilities, architecture, and parameters.
4. Modeling and Simulation Methods and Their Applications
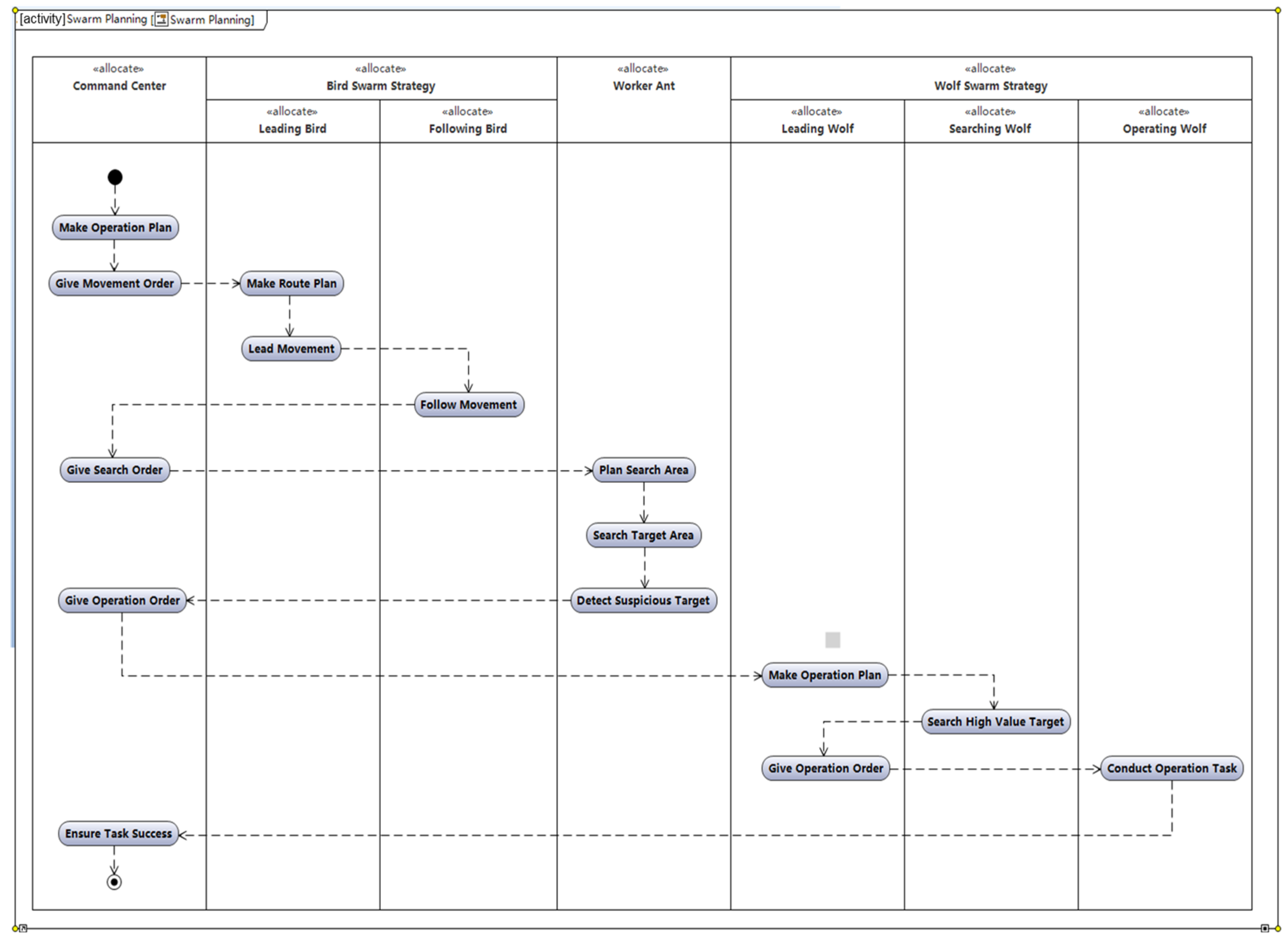
4.1. Descriptive Modeling for Swarm Ontology
4.2. Metamodel and Metamodeling Supporting an Autonomous System
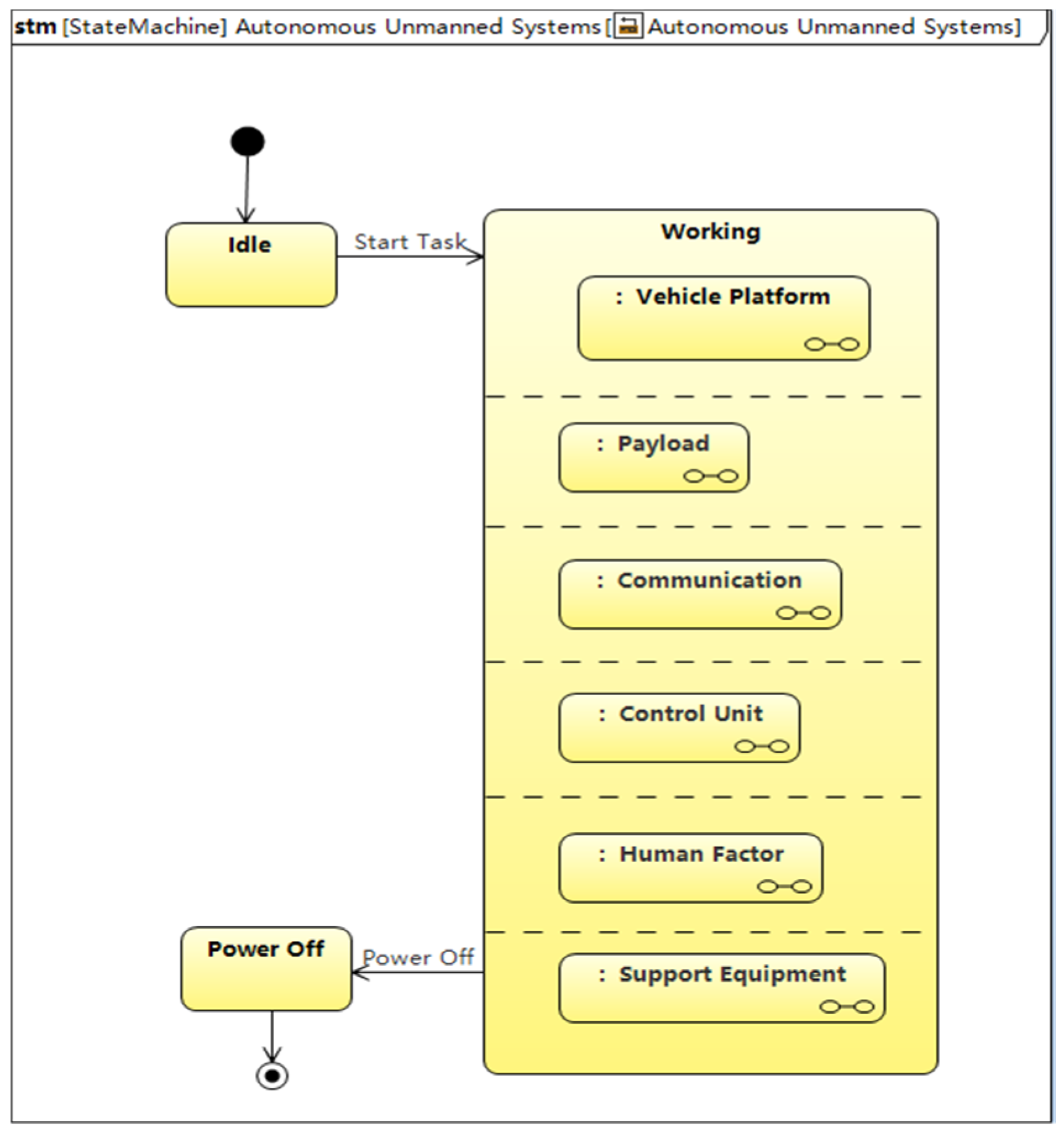
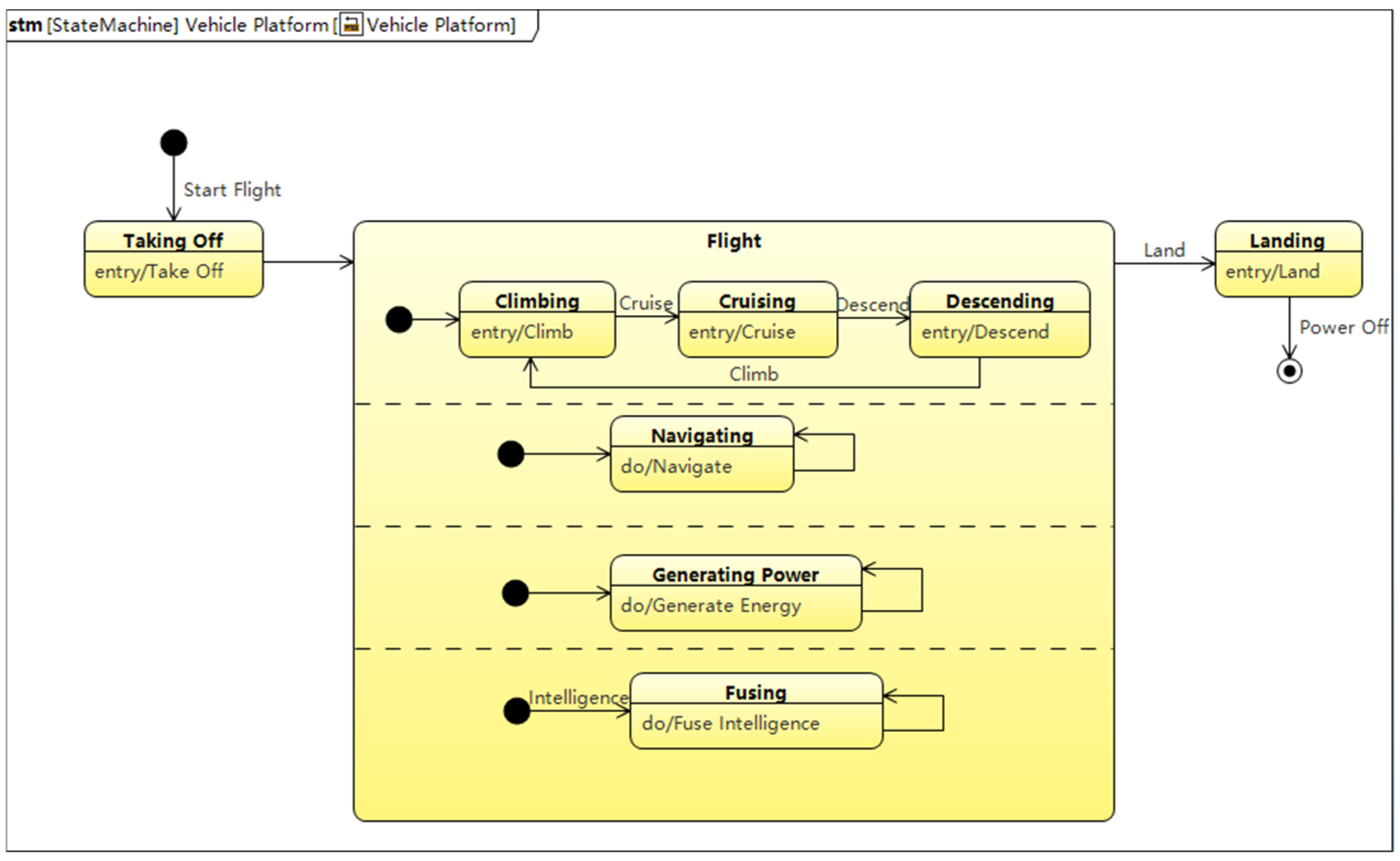
4.3. Multi-Agent-Based M&S for CPS
4.4. V&V in a Hybrid Virtual/Real Integration Environment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Burkhart, R. A Swarm Ontology for Complex Systems Modeling. In Proceedings of the Symposium on Complex Systems Engineering, Santa Monica, CA, USA, 11–12 January 2007. [Google Scholar]
- Giles, K. A Framework for Integrating the Development of Swarm Unmanned Aerial System Doctrine and Design. Available online: https://docslib.org/doc/7281488/a-framework-for-integrating-the-development-of-swarm-unmanned-aerial-system-doctrine-and-design (accessed on 5 September 2021).
- Giles, K.; Giammarco, K. A mission-based architecture for swarm unmanned systems. Syst. Eng. 2019, 22, 271–281. [Google Scholar] [CrossRef]
- Navarro, I.; Matía, F. An Introduction to Swarm Robotics. ISRN Robot. 2013, 2013, 608164. [Google Scholar] [CrossRef]
- Gorodetsky, I.; Samoylov, V.V.; Trotskii, D.V. The Reference Ontology of Collective Behavior of Autonomous Agents and Its Extensions. Comput. Syst. Sci. Int. 2015, 54, 765–782. [Google Scholar] [CrossRef]
- Schlenoff, C.; Prestes, E.; Madhavan, R.; Goncalves, P.; Li, H.; Balakirsky, S.; Kramer, T.; Miguelanez, E. An IEEE standard Ontology for Robotics and Automation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 1337–1342. [Google Scholar]
- Castro, R.D.; Marcosig, E.P.; Giribet, J.I. Simulation Model Continuity for Efficient Development of Embedded Controllers in Cyber-Physical Systems. In Complexity Challenges in Cyber Physical Systems: Using Modeling and Simulation (M&S) to Support Intelligence, Adaptation and Autonomy, 1st ed.; Saurabh, M., Andreas, T., Eds.; Willy: Hoboken, NJ, USA, 2020; Volume 1, pp. 193–220. [Google Scholar]
- Saurabh, M.; Andreas, T. The Complexity in Application of Modeling and Simulation for Cyber Physical Systems Engineering. In Complexity Challenges in Cyber Physical Systems: Using Modeling and Simulation (M&S) to Support Intelligence, Adaptation and Autonomy, 1st ed.; Saurabh, M., Andreas, T., Eds.; Willy: Hoboken, NJ, USA, 2020; Volume 1, pp. 3–16. [Google Scholar]
- Walid, M.T.; Abd-Elhamid, M.T.; Johan, T. Cyber-Physical Systems: A Model-Based Approach, 1st ed.; Springer: Cham, Switzerland, 2021; pp. 5–12. [Google Scholar]
- Dominique, B.; Rima, A.; Mauro, I.; Bedir, T.; Holger, G. An ontological foundation for multi-paradigm modelling for cyber-physical systems. In Multi-Paradigm Modeling Approach for Cyber-Physical Systems, 1st ed.; Bedir, T., Dominique, B., Hans, V., Miguel, G., Paulo, C., Vasco, A., Eds.; Elsevier: London, UK, 2021; pp. 9–43. [Google Scholar]
- Matarić, M.J.; Michaud, F. Behavior-Based Systems. In Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 899–909. [Google Scholar]
- Bermejo-Alonso, J.; Sanz, R.; Rodrguez, M.; Hernndez, C. An Ontological Framework for Autonomous Systems Modelling. Int. J. Adv. Intell. Syst. 2010, 3, 211–225. [Google Scholar]
- Borky, J.M.; Bradley, T.H. Effective Model-Based Systems Engineering; Springer: Cham, Switzerland, 2019; pp. 23–96. [Google Scholar]
- Wagner, D.A.; Bennett, M.B.; Karban, R.; Rouquette, N.; Jenkins, S.; Ingham, M. An ontology for State Analysis: Formalizing the mapping to SysML. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2012; pp. 1–16. [Google Scholar]
- Zeigler, B.P.; Kim, D. Discrete Event Systems Specification (DEVS), MBSE, and Digital Engineering. Available online: https://www.researchgate.net/publication/355108235_Discrete_Event_Systems_Specification_DEVS_MBSE_and_Digital_Engineering (accessed on 15 October 2022).
- Wu, X.Q.; Yan, X.F.; Li, X.C.; Wang, Y.Z. Simulating hybrid SysML models: A model transformation approach under the DEVS framework. J. Supercomput. 2023, 79, 2010–2030. [Google Scholar]
- Mendi, A.F.; Erol, T.; Doğan, D. Digital Twin in the Military Field. IEEE Internet Comput. 2021, 6, 33–40. [Google Scholar] [CrossRef]
- Jones, D.; Snider, C.; Nassehi, A.; Yon, J.; Hicks, B. Characterising the Digital Twin: A systematic literature review. CIRP J. Manuf. Sci. Technol. 2020, 29, 36–52. [Google Scholar] [CrossRef]
- Bickford, J.; Van Bossuyt, D.L.; Beery, P.; Pollman, A. Operationalizing digital twins through model-based systems engineering methods. Syst. Eng. 2020, 23, 724–750. [Google Scholar] [CrossRef]
- Grieves, M. Digital Twin: Manufacturing Excellence through Virtual Factory Replication. White Pap. 2014, 1, 1–7. [Google Scholar]
- Saurabh, M.; Andreas, T. Multi-Perspective Modeling and Holistic Simulation–A System-Thinking Approach to Very Complex Systems Analysis. In Complexity Challenges in Cyber Physical Systems: Using Modeling and Simulation (M&S) to Support Intelligence, Adaptation and Autonomy, 1st ed.; Saurabh, M., Andreas, T., Eds.; Willy: Hoboken, NJ, USA, 2020; Volume 1, pp. 83–110. [Google Scholar]
- Drogoul, A.; Vanbergue, D.; Meurisse, T. Multi-Agent Based Simulation: Where are the Agents. In Multi-Agent-Based Simulation II, MABS 2002, Proceedings of the Third International Workshop on Multi-Agent Systems and Agent-Based Simulation, Bologna, Itlay, 15–16 July 2002; Simão Sichman, J., Bousquet, F., Davidsson, P., Eds.; Springer: Berlin, Heidelberg, Germany, 2003; Volume 2581, pp. 1–15. [Google Scholar]
- Julián, V.; Botti, V. Multi-Agent Systems. Appl. Sci. 2019, 9, 1402. [Google Scholar] [CrossRef]
- Gao, X.H.; Zhang, Y.Q.; Wang, Z.Q. The Architecture of Digital System Model for Systems-of-Systems Engineering. In Proceedings of the Chinese Automation Congress (CAC), IEEE, Hangzhou, China, 22–24 November 2019; pp. 2744–2747. [Google Scholar]
- Van Hien, N.; Diem, P.G. A Practical Specialization of MDA/MBSE Approach to Develop AUV Controllers. J. Mar. Sci. Appl. 2020, 20, 102–116. [Google Scholar] [CrossRef]
- Badiru, A.B. Artificial Intelligence and Digital Systems Engineering, 1st ed.; CRC: Miami, FL, USA, 2022; pp. 43–63. [Google Scholar]
- Graves, H. Integrating SysML and OWL. In Proceedings of the 6th International Conference on OWL: Experiences and Directions, Chantilly, VA, USA, 23–24 October 2009; Volume 529, pp. 117–124. [Google Scholar]
- STANAG 4586–Standard Interfaces of UAV Control System (UCS) for NATO UAV Interoperability, docslib.org. Available online: https://docslib.org/doc/13475156/stanag-4586-standard-interfaces-of-ucs-for-nato-uav-interoperability (accessed on 5 January 2021).
- English, R. The Joint Architecture for Unmanned Systems, A Set of SAE Interoperability Standards; SAE Technical Paper 2009; SAE International: Warrendale, PA, USA, 2009; Volume 2009-01-3250. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Methodologies/Methods | Key Ideas and Its Usage | Refs. |
|---|---|---|---|
| 1 | Swarm ontology | Ontology: A set of concepts of the problem or knowledge and the relationships between them, which is suitable for describing some domain of interest. The aim here was to define a swarm ontology in terms of basic types of the elements in specific domains and their properties connected to each other by a formal language, such as SysML. | [1,5,6,12,14] |
| 2 | Generic swarm architecture: An integrated swarm framework with a composable model abstraction of various specific properties depending on individual autonomous units or agents. The aim here was to develop a method to design a swarm architecture from an initial mission and then various models to be iterated and verified to achieve the desired behavior of the swarm. | [2,3,4] | |
| 3 | M&S for a CPS | CPS design paradigm: A new design technique to encompass physical and cyber components to embrace the most appropriate M&S at the component level and at the overall abstraction level in which the system can address the general mission or specific problem. The aim here was to use appropriate M&S to facilitate all the phases of the CPS design in MBSE processes, ranging from the conception to the hardware and software design, and then conduct a massive deployment evaluation in a simulation or virtual/real environment. | [7,8,9,10,21] |
| 4 | Multi-Paradigm Modeling (MPM): A key approach for CPS design processes to support the coordination of different modeling paradigms, model transformation, and compositional modeling approaches to form the system from specification to verification and validation. The aim here was to associate the conventional methods with model-based designs, in which the specification and design solution are executed and implemented as a domain-specific modeling. | [10] | |
| 5 | Behavioral simulation | Behavior-based system: an AI-based system which forms as a result of the individual behavior of a set of physical components and/or cyber components (e.g., agents) and their interaction in a dynamic context. The aim here was to develop a behavior-based system at a variety of abstraction levels with semantical enrichment, to facilitate the top–down sharing of a set of common concepts and properties from an ontological model and the bottom–up incremental construction of the coupling of sensing and action through behaviors. | [5,11] |
| 6 | Discrete Events System Specification: A mathematical formalism to describe hybrid systems including discrete and continuous behaviors, such as a CPS, which combine discrete events, discrete time, and continuous dynamics in a mathematically sound way. The aim here was to provide a model mapping rule to transform discrete and continuous behaviors into general systems models based on the state machine and constraint diagrams of SysML. | [11,15,16] | |
| 7 | Multi-Agent-based Simulation (MAS): An emerging simulation technique to address very different individual models ranging from simple (reactive agents) to more complex (cognitive agents) within the unified conceptual framework. The aim here was to develop an autonomous CPS computation model to integrate intelligence by communicating/computing from cyber components and a real-time adaptation via the distributed control of physical components. | [22,23] | |
| 8 | Model-driven engineering | Model Based Systems Engineering: The formalized application of modeling to support system requirements, design, analysis, verification, and validation activities throughout system life cycle phases. The aim here was to introduce a top–down, hierarchical approach within an overarching ConOps to decompose into requirement, structure, behavior, and even agent algorithms. | [3,13,24,25,26] |
| 9 | Formal modeling with SysML: With formal logic and within a formal method, SysML can be used to maintain consistency as a design evolvement to provide formal semantics and enable engineers to reason in the model-based development process. The aim here was to apply a single formal modeling language throughout the whole process of MBSE from concept, requirements, architectures, high-level design, V&V, etc., and SysML was extended upward to ontology definition and downward to the definition of opaque behavior and equation of agents; also, the aim was to build a single source of truth to avoid the ambiguity of model semantics. | [12,16,27] | |
| 10 | Virtual/real hybrid simulation environment | Digital Twin: A virtual representation to model the states of a physical system by collecting information/data from the physical system or components through sensors, so one can experiment or predict the behavior of the physical system in a real environment. The aim here was to construct a swarm digital twin model to support swarm experiments ranging from the concept of operations to integrating verification in an enhanced M&S environment. | [17,18,19,20] |
| 11 | Live–Virtual–Constructive simulation: A broadly used taxonomy for classifying M&S. A Live simulation involves humans interacting (play acting, etc.) with real systems; a Virtual simulation is a fusion of human and computer-generated experiences; and a Constructive simulation is entirely implemented in a digital computer and may have high levels of abstraction. The aim here was to incorporate Live–Virtual–Constructive simulations into a single M&S environment to leverage the best features of each domain-specific modeling technique to effectively present swarm emergencies and evolve operational capabilities. | [8] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, X.; Xiao, G.; Xie, K.; Wang, W.; Fu, Y.; Chang, C.; Wang, Z. A Framework of Modeling and Simulation Based on Swarm Ontology for Autonomous Unmanned Systems. Appl. Sci. 2023, 13, 9297. https://doi.org/10.3390/app13169297
Gao X, Xiao G, Xie K, Wang W, Fu Y, Chang C, Wang Z. A Framework of Modeling and Simulation Based on Swarm Ontology for Autonomous Unmanned Systems. Applied Sciences. 2023; 13(16):9297. https://doi.org/10.3390/app13169297
Chicago/Turabian StyleGao, Xinghai, Gang Xiao, Kai Xie, Weijia Wang, Yuhua Fu, Chuangye Chang, and Zhuoqi Wang. 2023. "A Framework of Modeling and Simulation Based on Swarm Ontology for Autonomous Unmanned Systems" Applied Sciences 13, no. 16: 9297. https://doi.org/10.3390/app13169297
APA StyleGao, X., Xiao, G., Xie, K., Wang, W., Fu, Y., Chang, C., & Wang, Z. (2023). A Framework of Modeling and Simulation Based on Swarm Ontology for Autonomous Unmanned Systems. Applied Sciences, 13(16), 9297. https://doi.org/10.3390/app13169297