
The Multi-Trip Autonomous Mobile Robot Scheduling Problem with Time Windows in a Stochastic Environment at Smart Hospitals

Abstract
:1. Introduction
- (1)
- A stochastic mixed-integer programming model is established to analyze the medical AMR routing problem with stochastic travel time and service time.
- (2)
- To increase system utilization and decrease the number of AMRs required, each AMR can run multiple routes every day.
- (3)
- The chance constraint of the violated time window is considered to guarantee a high service level.
- (4)
- Based on the observed AMR service process, we introduce two repair operators: the depot insertion operator and the charging insertion operator. Additionally, an AMR decrease operator is implemented. These operators are incorporated into the VNS algorithm to address the stochastic AMR routing problem.
2. Problem Description
- (1)
- Stochastic travel time: due to unforeseeable obstacles, the travel time between any two requests is subject to randomness. Additionally, the AMR waiting time for elevators is also stochastic.
- (2)
- Stochastic service time: the duration of AMR service varies depending on the service object or environment.
- (3)
- Time window: medical requests are associated with specific time windows. Failure to deliver medicine to the patient within the designated timeframe can result in severe consequences.
- (4)
- Battery constraint: low battery levels require immediate recharging at the charging station.
- (5)
- Capacity constraint: the AMR’s load capacity sets an upper bound on the items it can carry.
3. Model Formulation
4. Reduced Variable Neighborhood Search
4.1. The Algorithm of the VNS
| Algorithm 1. The VNS Algorithm |
| Input: parameters , Output: the final solution 1. Generate initial solution;//see Section 4.2 2. Feasible operation ();//Algorithm 4 3.; 4. Whiledo 5. Local search ();//Algorithm 2 6. Feasible operation ();//Algorithm 4 7. Shaking ();//Algorithm 3 8. If//select the best solution from and 9. 10. //update the current solution 11. End if 12. End while 13. Return |
4.2. An Initial Solution
4.3. Local Search and Shake Procedure
| Algorithm 2. Local Search |
| Input: the initialized solution , neighborhoods , . Output: a solution 1. 2. 3. Repeat 4. If then 5. //update the current best solution 6. //initial neighborhood 7. //update the current solution 8. Else 9. //next neighborhood 10. //update the current solution 11. End if 12. //output the best solution 13. Returns |
- (1)
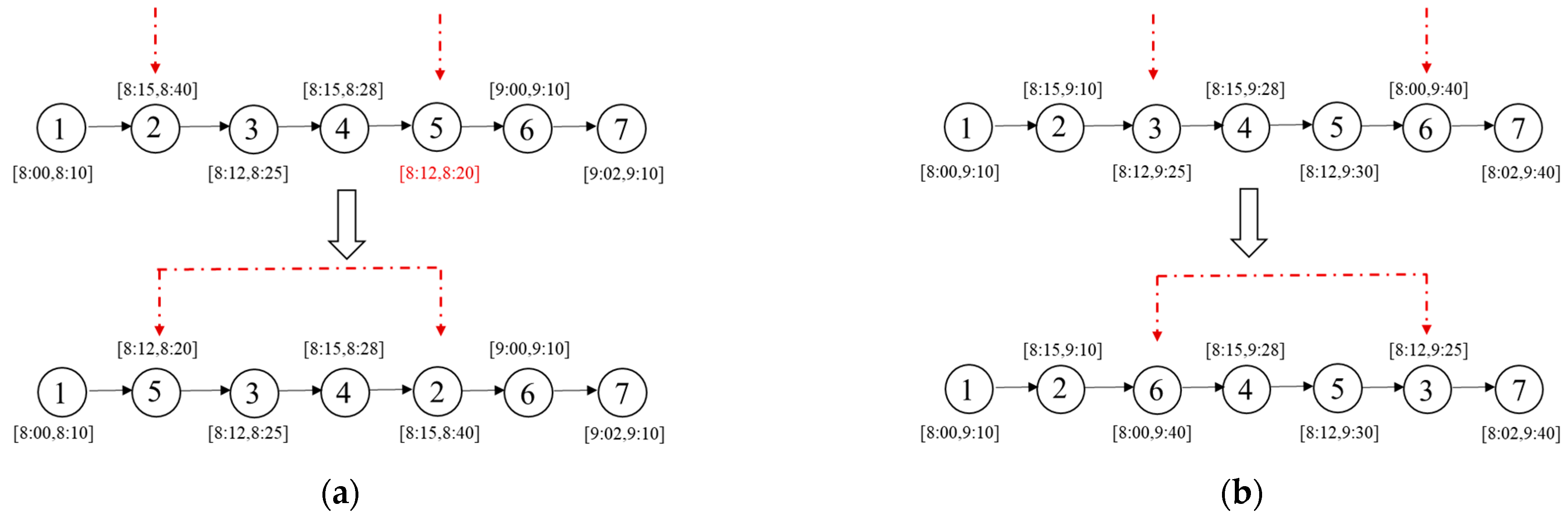
- The swap* operator: Figure 2a illustrates a scenario where Request 5 violates its time window constraints at its current position, while the upper bound of the time window for Request 2 is looser. Consequently, Requests 2 and 5 are chosen for swapping. On the other hand, to avoid getting stuck in local optima when all requests on the current route to satisfy their time window constraints, two requests from the current solution are randomly selected for position swapping, while the remaining requests remain unchanged. Figure 2b displays an example where Requests 3 and 6 are selected, resulting in a new solution generated through the swap operation.
- (2)
- The 2-opt* operator: as shown in Figure 3a, a declining trend is observed in the upper bound of time windows for the sub-route between Request 2 and Request 5 in the existing route. Therefore, we reverse the order of this sub-route between Requests 2 and 5 to improve the solution. For cases where there is no sub-route with decreasing time window upper bounds in the current solution, we randomly select two requests from the incumbent solution and reverse the order of points between them before inserting them back into the service route. As shown in Figure 3b, Requests 3 and 6 are randomly selected, and their routes are reversed to create a new feasible solution.
- (3)
- The relocation* operator: Similarly, by examining the time windows of requests on the current route, as shown in Figure 4a, we notice that Request 5 exactly violates its time window constraints. Therefore, we select Request 5 and remove it from its current position, then insert it before Request 3, which has a later time window. If none of the above conditions apply to the current route, we randomly select a request, remove it from its current position, and insert it at a random position. As shown in Figure 4b, Request 6 is randomly selected and placed after Request 4 in the new solution.
- (4)
- Depot insertion: if a service route is not feasible due to overloading, a depot is inserted before the point where the remaining load does not meet the downward load demands. Assume that the load capacity of each AMR is 20. In Figure 5, the number above each circled node represents the demand for each request. Since , the route is not feasible due to overload; the first request with a negative remaining load in the current route is Request 5. The depot is inserted before Request 5, as shown in Figure 5b. The modified feasible routes are , .
- (5)
- Charging insertion: if a service route is not feasible due to insufficient electricity, a charging station is inserted before the point whose remaining electricity is lower than the lower bound of battery level . Let . As shown in Figure 6a, route is not feasible due to insufficient electricity, where the number above each circled node represents the remaining battery level of the AMR. The first request with non-positive remaining electricity in the current route is Request 5. The charging station is inserted before Request 5, as shown in Figure 5b. The modified feasible route is .
- (6)
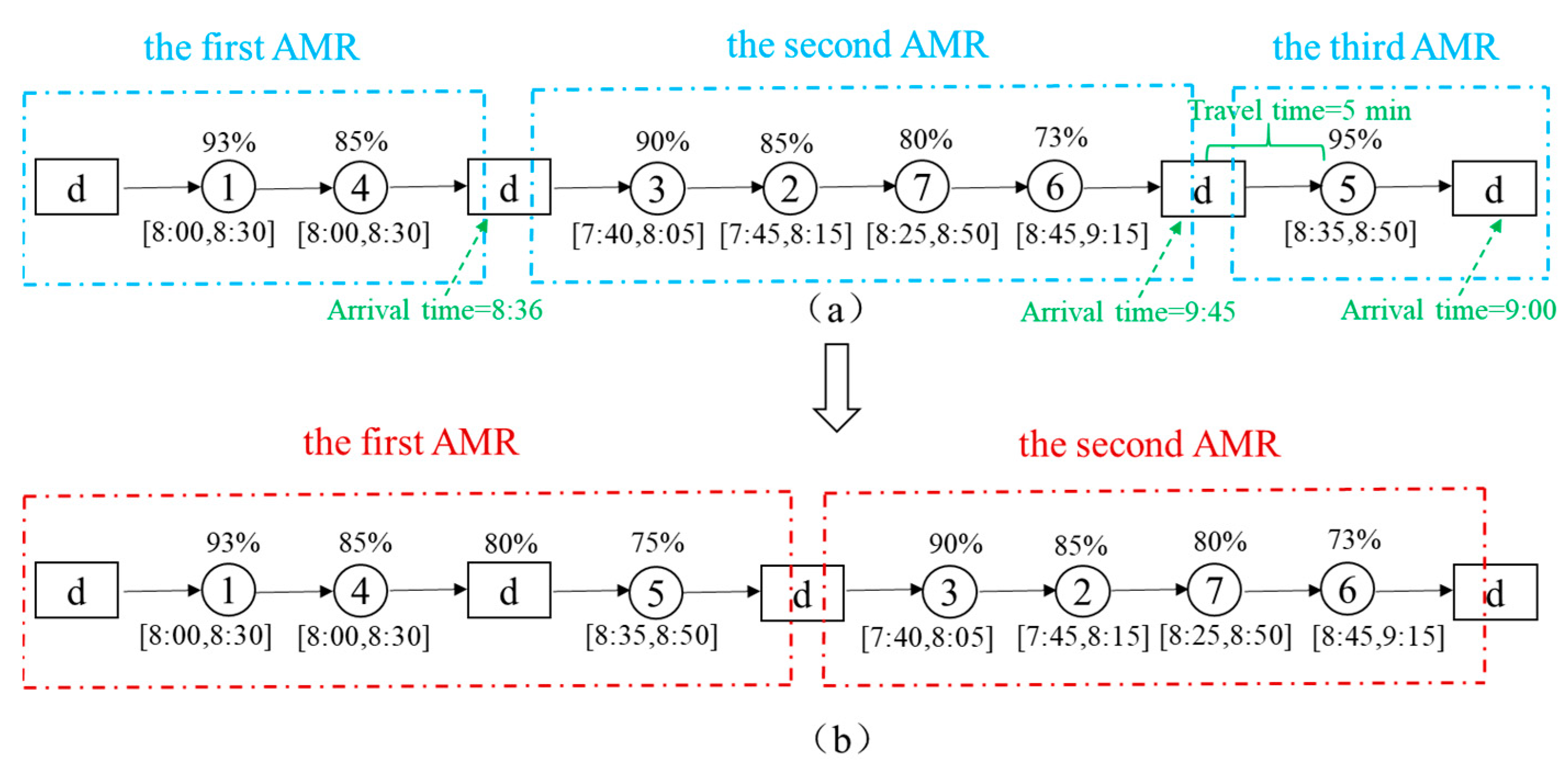
- AMR decrease: the primary objective of this operator is to reduce the number of currently engaged AMRs in service provision while ensuring compliance with the constraints related to time windows and battery capacity. In Figure 7a, the current set of routes consists of three AMRs serving seven requests. The numbers above each request point indicate the remaining battery capacity to reach that request, while the numbers below represent the corresponding time window. Upon observing that the first AMR completes its service and returns to the depot at 8:36, and that it only takes 5 min to travel from the depot to Request 5, we conclude that the first AMR can proceed to Request 5 after completing its transportation task of Request 4. As shown in Figure 7b, the improved set of routes becomes:
| Algorithm 3. Shaking Procedure |
| Input: solution Output: the shake solution 1. For solution do 2. min{2-opt-L*};//Choose the best solution from the neighborhood solutions 2-opt-L* generated by the 2-opt L* operator. 3. If then// 4. 5. Else 6. 7. End if 8. End for 9. Return |
| Algorithm 4. Feasible Operation |
| Input: solution Output: feasible solution 1. If infeasible then 2. Generate a feasible solution by depot insertion and charging insertion. 3. Else 4. 5. End 6. Using the AMR decrease operator to optimize and generate . 7. Return |
5. Numerical Examples
5.1. Parameter Tuning
5.2. Comparative Experiments
5.2.1. Experiment 1
5.2.2. Experiment 2
5.2.3. Experiment 3
5.3. Case Study
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Request | Demand | Time Window | |
|---|---|---|---|
| 1 | 2 | 300 | [11:21, 14:23] |
| 2 | 2 | 300 | [11:24, 14:18] |
| 3 | 2 | 300 | [11:09, 14:02] |
| 4 | 2 | 300 | [11:08, 14:09] |
| 5 | 2 | 300 | [11:22, 14:27] |
| 6 | 2 | 300 | [11:13, 14:25] |
| 7 | 2 | 300 | [10:59, 14:18] |
| 8 | 2 | 300 | [10:56, 14:29] |
| 9 | 2 | 300 | [11:23, 14:26] |
| 10 | 2 | 300 | [10:59, 14:19] |
| 11 | 2 | 300 | [11:20, 14:26] |
| 12 | 2 | 300 | [10:48, 14:15] |
| 13 | 2 | 300 | [10:54, 14:09] |
| 14 | 2 | 300 | [11:26, 14:02] |
| 15 | 2 | 300 | [10:38, 14:14] |
| 16 | 2 | 300 | [10:39, 14:25] |
| 17 | 2 | 300 | [10:44, 14:16] |
| 18 | 2 | 300 | [11:07, 17:00] |
| 19 | 2 | 300 | [11:16, 14:13] |
| 20 | 2 | 300 | [11:02, 14:09] |
| 21 | 2 | 300 | [11:02, 14:05] |
| 22 | 2 | 300 | [10:43, 14:23] |
| 23 | 2 | 300 | [10:39, 14:19] |
| 24 | 2 | 300 | [11:26, 14:26] |
| 25 | 2 | 300 | [10:56, 14:06] |
| 26 | 2 | 300 | [11:14, 14:14] |
| 27 | 2 | 300 | [11:20, 14:16] |
| 28 | 2 | 300 | [10:43, 14:02] |
| 29 | 2 | 300 | [10:55, 14:23] |
| 30 | 2 | 300 | [11:02, 14:25] |
| 31 | 2 | 300 | [11:11, 14:13] |
| 32 | 6 | 300 | [11:21, 14:15] |
| 33 | 2 | 300 | [10:43, 14:08] |
| 34 | 2 | 300 | [10:48, 14:29] |
| 35 | 2 | 300 | [11:12, 14:17] |
| 36 | 2 | 300 | [11:09, 14:14] |
| 37 | 2 | 300 | [10:32, 14:01] |
| 38 | 2 | 300 | [11:16, 14:18] |
| 39 | 2 | 300 | [11:47, 14:34] |
| 40 | 2 | 300 | [10:51, 14:08] |
| 41 | 2 | 300 | [10:47, 14:23] |
| 42 | 2 | 300 | [10:40, 14:14] |
| 43 | 2 | 300 | [11:05, 14:06] |
| 44 | 2 | 300 | [10:50, 14:11] |
| 45 | 2 | 300 | [11:06, 14:00] |
| 46 | 2 | 300 | [11:14, 14:25] |
| 47 | 2 | 300 | [11:04, 14:28] |
| 48 | 2 | 300 | [10:37, 14:03] |
| 49 | 2 | 300 | [11:17, 14:26] |
| 50 | 2 | 300 | [11:08, 14:10] |
| 51 | 2 | 300 | [10:32, 14:04] |
| 52 | 2 | 300 | [10:54, 14:24] |
| 53 | 2 | 300 | [11:25, 14:20] |
| 54 | 2 | 300 | [11:16, 14:14] |
| 55 | 2 | 300 | [11:14, 14:19] |
| 56 | 2 | 300 | [11:41, 14:13] |
| 57 | 2 | 300 | [11:02, 14:04] |
| 58 | 2 | 300 | [11:24, 14:05] |
| 59 | 2 | 300 | [10:49, 14:02] |
| 60 | 2 | 300 | [10:50, 14:22] |
| 61 | 2 | 300 | [10:30, 14:15] |
| 62 | 2 | 300 | [11:05, 14:10] |
| 63 | 2 | 300 | [11:09, 14:24] |
| 64 | 6 | 300 | [10:53, 14:26] |
| Distance | Depot | Requests | |||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 | 25 | 26 | 27 | 28 | 29 | 30 | 31 | 32 | |
| 0 | 0 | 141 | 141 | 141 | 141 | 141 | 141 | 148 | 148 | 148 | 148 | 148 | 148 | 157 | 157 | 157 | 157 | 157 | 157 | 161 | 161 | 161 | 161 | 161 | 161 | 201 | 201 | 201 | 201 | 200 | 197 | 197 | 163 |
| 1 | 141 | 0 | 54 | 54 | 54 | 54 | 54 | 61 | 61 | 61 | 61 | 61 | 61 | 70 | 70 | 70 | 70 | 70 | 70 | 74 | 74 | 74 | 74 | 74 | 74 | 311 | 311 | 311 | 310 | 310 | 307 | 307 | 76 |
| 2 | 141 | 54 | 0 | 54 | 54 | 54 | 54 | 61 | 61 | 61 | 61 | 61 | 61 | 70 | 70 | 70 | 70 | 70 | 70 | 74 | 74 | 74 | 74 | 74 | 74 | 311 | 311 | 311 | 310 | 310 | 307 | 307 | 76 |
| 3 | 141 | 54 | 54 | 0 | 54 | 54 | 54 | 61 | 61 | 61 | 61 | 61 | 61 | 70 | 70 | 70 | 70 | 70 | 70 | 74 | 74 | 74 | 74 | 74 | 74 | 311 | 311 | 311 | 310 | 310 | 307 | 307 | 76 |
| 4 | 141 | 54 | 54 | 54 | 0 | 54 | 54 | 61 | 61 | 61 | 61 | 61 | 61 | 70 | 70 | 70 | 70 | 70 | 70 | 74 | 74 | 74 | 74 | 74 | 74 | 311 | 311 | 311 | 310 | 310 | 307 | 307 | 76 |
| 5 | 141 | 54 | 54 | 54 | 54 | 0 | 54 | 61 | 61 | 61 | 61 | 61 | 61 | 70 | 70 | 70 | 70 | 70 | 70 | 74 | 74 | 74 | 74 | 74 | 74 | 311 | 311 | 311 | 310 | 310 | 307 | 307 | 76 |
| 6 | 141 | 54 | 54 | 54 | 54 | 54 | 0 | 61 | 61 | 61 | 61 | 61 | 61 | 70 | 70 | 70 | 70 | 70 | 70 | 74 | 74 | 74 | 74 | 74 | 74 | 311 | 311 | 311 | 310 | 310 | 307 | 307 | 76 |
| 7 | 148 | 61 | 61 | 61 | 61 | 61 | 61 | 0 | 69 | 69 | 69 | 69 | 69 | 77 | 77 | 77 | 77 | 77 | 77 | 82 | 82 | 82 | 82 | 82 | 82 | 318 | 318 | 318 | 318 | 318 | 315 | 315 | 84 |
| 8 | 148 | 61 | 61 | 61 | 61 | 61 | 61 | 69 | 0 | 69 | 69 | 69 | 77 | 77 | 77 | 77 | 77 | 77 | 82 | 82 | 82 | 82 | 82 | 82 | 318 | 318 | 318 | 318 | 318 | 315 | 315 | 315 | 84 |
| 9 | 148 | 61 | 61 | 61 | 61 | 61 | 61 | 69 | 69 | 0 | 0 | 69 | 77 | 77 | 77 | 77 | 77 | 77 | 82 | 82 | 82 | 82 | 82 | 82 | 318 | 318 | 318 | 318 | 318 | 315 | 315 | 315 | 84 |
| 10 | 148 | 61 | 61 | 61 | 61 | 61 | 61 | 69 | 69 | 0 | 0 | 69 | 77 | 77 | 77 | 77 | 77 | 77 | 82 | 82 | 82 | 82 | 82 | 82 | 318 | 318 | 318 | 318 | 318 | 315 | 315 | 315 | 84 |
| 11 | 148 | 70 | 61 | 61 | 61 | 61 | 61 | 69 | 69 | 69 | 69 | 0 | 77 | 77 | 77 | 77 | 77 | 77 | 82 | 82 | 82 | 82 | 82 | 82 | 318 | 318 | 318 | 318 | 318 | 315 | 315 | 315 | 84 |
| 12 | 148 | 70 | 61 | 61 | 61 | 61 | 61 | 69 | 77 | 77 | 77 | 77 | 0 | 77 | 77 | 77 | 77 | 77 | 82 | 82 | 82 | 82 | 82 | 82 | 318 | 318 | 318 | 318 | 318 | 315 | 315 | 315 | 84 |
| 13 | 157 | 70 | 70 | 70 | 70 | 70 | 70 | 77 | 77 | 77 | 77 | 77 | 77 | 0 | 86 | 86 | 86 | 90 | 90 | 90 | 90 | 90 | 90 | 327 | 327 | 327 | 327 | 326 | 323 | 323 | 323 | 323 | 93 |
| 14 | 157 | 70 | 70 | 70 | 70 | 70 | 70 | 77 | 77 | 77 | 77 | 77 | 77 | 86 | 0 | 86 | 86 | 90 | 90 | 90 | 90 | 90 | 90 | 327 | 327 | 327 | 327 | 326 | 323 | 323 | 323 | 323 | 93 |
| 15 | 157 | 70 | 70 | 70 | 70 | 70 | 70 | 77 | 77 | 77 | 77 | 77 | 77 | 86 | 86 | 0 | 86 | 90 | 90 | 90 | 90 | 90 | 90 | 327 | 327 | 327 | 327 | 326 | 323 | 323 | 323 | 323 | 93 |
| 16 | 157 | 70 | 70 | 70 | 70 | 70 | 70 | 77 | 77 | 77 | 77 | 77 | 77 | 86 | 86 | 86 | 0 | 90 | 90 | 90 | 90 | 90 | 90 | 327 | 327 | 327 | 327 | 326 | 323 | 323 | 323 | 323 | 93 |
| 17 | 157 | 70 | 70 | 70 | 70 | 70 | 70 | 77 | 77 | 77 | 77 | 77 | 77 | 90 | 90 | 90 | 90 | 0 | 90 | 90 | 90 | 90 | 90 | 327 | 327 | 327 | 327 | 326 | 323 | 323 | 323 | 323 | 93 |
| 18 | 157 | 70 | 70 | 70 | 70 | 70 | 70 | 77 | 82 | 82 | 82 | 82 | 82 | 90 | 90 | 90 | 90 | 90 | 0 | 90 | 90 | 90 | 90 | 327 | 327 | 327 | 327 | 326 | 323 | 323 | 323 | 323 | 93 |
| 19 | 161 | 74 | 74 | 74 | 74 | 74 | 74 | 82 | 82 | 82 | 82 | 82 | 82 | 90 | 90 | 90 | 90 | 90 | 90 | 0 | 95 | 95 | 95 | 332 | 332 | 332 | 332 | 331 | 328 | 328 | 328 | 328 | 97 |
| 20 | 161 | 74 | 74 | 74 | 74 | 74 | 74 | 82 | 82 | 82 | 82 | 82 | 82 | 90 | 90 | 90 | 90 | 90 | 90 | 95 | 0 | 95 | 95 | 332 | 332 | 332 | 332 | 331 | 328 | 328 | 328 | 328 | 97 |
| 21 | 161 | 74 | 74 | 74 | 74 | 74 | 74 | 82 | 82 | 82 | 82 | 82 | 82 | 90 | 90 | 90 | 90 | 90 | 90 | 95 | 95 | 0 | 95 | 332 | 332 | 332 | 332 | 331 | 328 | 328 | 328 | 328 | 97 |
| 22 | 161 | 74 | 74 | 74 | 74 | 74 | 74 | 82 | 82 | 82 | 82 | 82 | 82 | 90 | 90 | 90 | 90 | 90 | 90 | 95 | 95 | 95 | 0 | 332 | 332 | 332 | 332 | 331 | 328 | 328 | 328 | 328 | 97 |
| 23 | 161 | 74 | 74 | 74 | 74 | 74 | 74 | 82 | 82 | 82 | 82 | 82 | 82 | 327 | 327 | 327 | 327 | 327 | 327 | 332 | 332 | 332 | 332 | 0 | 332 | 332 | 332 | 331 | 328 | 328 | 328 | 328 | 97 |
| 24 | 161 | 74 | 74 | 74 | 74 | 74 | 74 | 82 | 318 | 318 | 318 | 318 | 318 | 327 | 327 | 327 | 327 | 327 | 327 | 332 | 332 | 332 | 332 | 332 | 0 | 332 | 332 | 331 | 328 | 328 | 328 | 328 | 97 |
| 25 | 201 | 311 | 311 | 311 | 310 | 310 | 310 | 318 | 318 | 318 | 318 | 318 | 318 | 327 | 327 | 327 | 327 | 327 | 327 | 332 | 332 | 332 | 332 | 332 | 332 | 0 | 39 | 39 | 35 | 35 | 35 | 35 | 334 |
| 26 | 201 | 311 | 311 | 311 | 310 | 310 | 310 | 318 | 318 | 318 | 318 | 318 | 318 | 327 | 327 | 327 | 327 | 327 | 327 | 332 | 332 | 332 | 332 | 332 | 332 | 39 | 0 | 39 | 35 | 35 | 35 | 35 | 334 |
| 27 | 201 | 311 | 311 | 311 | 310 | 310 | 310 | 318 | 318 | 318 | 318 | 318 | 318 | 326 | 326 | 326 | 326 | 326 | 326 | 331 | 331 | 331 | 331 | 331 | 331 | 39 | 39 | 0 | 35 | 35 | 35 | 35 | 334 |
| 28 | 201 | 311 | 311 | 311 | 310 | 310 | 310 | 318 | 318 | 318 | 318 | 318 | 318 | 323 | 323 | 323 | 323 | 323 | 323 | 328 | 328 | 328 | 328 | 328 | 328 | 35 | 35 | 35 | 0 | 35 | 35 | 35 | 334 |
| 29 | 200 | 310 | 310 | 310 | 310 | 310 | 310 | 318 | 315 | 315 | 315 | 315 | 315 | 323 | 323 | 323 | 323 | 323 | 323 | 328 | 328 | 328 | 328 | 328 | 328 | 35 | 35 | 35 | 35 | 0 | 35 | 35 | 334 |
| 30 | 197 | 307 | 307 | 307 | 307 | 307 | 307 | 315 | 315 | 315 | 315 | 315 | 315 | 323 | 323 | 323 | 323 | 323 | 323 | 328 | 328 | 328 | 328 | 328 | 328 | 35 | 35 | 35 | 35 | 35 | 0 | 31 | 330 |
| 31 | 197 | 307 | 307 | 307 | 307 | 307 | 307 | 315 | 315 | 315 | 315 | 315 | 315 | 323 | 323 | 323 | 323 | 323 | 323 | 328 | 328 | 328 | 328 | 328 | 328 | 35 | 35 | 35 | 35 | 35 | 31 | 0 | 330 |
| 32 | 163 | 76 | 76 | 76 | 76 | 76 | 76 | 84 | 84 | 84 | 84 | 84 | 84 | 93 | 93 | 93 | 93 | 93 | 93 | 97 | 97 | 97 | 97 | 97 | 97 | 334 | 334 | 334 | 334 | 333 | 330 | 330 | 163 |
| Floor | Depot | Requests | |||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 | 25 | 26 | 27 | 28 | 29 | 30 | 31 | 32 | |
| 0 | 0 | 4 | 5 | 6 | 7 | 8 | 9 | 3 | 5 | 5 | 7 | 8 | 9 | 4 | 5 | 6 | 7 | 8 | 9 | 4 | 5 | 6 | 7 | 8 | 9 | 5 | 6 | 0 | 8 | 4 | 7 | 8 | 3 |
| 1 | 4 | 0 | 1 | 2 | 3 | 4 | 5 | 1 | 1 | 1 | 3 | 4 | 5 | 0 | 1 | 2 | 3 | 4 | 5 | 0 | 1 | 2 | 3 | 4 | 5 | 1 | 2 | 4 | 4 | 0 | 3 | 4 | 1 |
| 2 | 5 | 1 | 0 | 1 | 2 | 3 | 4 | 2 | 0 | 0 | 2 | 3 | 4 | 1 | 0 | 1 | 2 | 3 | 4 | 1 | 0 | 1 | 2 | 3 | 4 | 0 | 1 | 5 | 3 | 1 | 2 | 3 | 2 |
| 3 | 6 | 2 | 1 | 0 | 1 | 2 | 3 | 3 | 1 | 1 | 1 | 2 | 3 | 2 | 1 | 0 | 1 | 2 | 3 | 2 | 1 | 0 | 1 | 2 | 3 | 1 | 0 | 6 | 2 | 2 | 1 | 2 | 3 |
| 4 | 7 | 3 | 2 | 1 | 0 | 1 | 2 | 4 | 2 | 2 | 0 | 1 | 2 | 3 | 2 | 1 | 0 | 1 | 2 | 3 | 2 | 1 | 0 | 1 | 2 | 2 | 1 | 7 | 1 | 3 | 0 | 1 | 4 |
| 5 | 8 | 4 | 3 | 2 | 1 | 0 | 1 | 5 | 3 | 3 | 1 | 0 | 1 | 4 | 3 | 2 | 1 | 0 | 1 | 4 | 3 | 2 | 1 | 0 | 1 | 3 | 2 | 8 | 0 | 4 | 1 | 0 | 5 |
| 6 | 9 | 5 | 4 | 3 | 2 | 1 | 0 | 6 | 4 | 4 | 2 | 1 | 0 | 5 | 4 | 3 | 2 | 1 | 0 | 5 | 4 | 3 | 2 | 1 | 0 | 4 | 3 | 9 | 1 | 5 | 2 | 1 | 6 |
| 7 | 3 | 1 | 2 | 3 | 4 | 5 | 6 | 0 | 2 | 2 | 4 | 5 | 6 | 1 | 2 | 3 | 4 | 5 | 6 | 1 | 2 | 3 | 4 | 5 | 6 | 2 | 3 | 3 | 5 | 1 | 4 | 5 | 0 |
| 8 | 5 | 1 | 0 | 1 | 2 | 3 | 4 | 2 | 0 | 0 | 2 | 3 | 4 | 1 | 0 | 1 | 2 | 3 | 4 | 1 | 0 | 1 | 2 | 3 | 4 | 0 | 1 | 5 | 3 | 1 | 2 | 3 | 2 |
| 9 | 5 | 1 | 0 | 1 | 2 | 3 | 4 | 2 | 0 | 0 | 2 | 3 | 4 | 1 | 0 | 1 | 2 | 3 | 4 | 1 | 0 | 1 | 2 | 3 | 4 | 0 | 1 | 5 | 3 | 1 | 2 | 3 | 2 |
| 10 | 7 | 3 | 2 | 1 | 0 | 1 | 2 | 4 | 2 | 2 | 0 | 1 | 7 | 3 | 2 | 1 | 0 | 1 | 2 | 3 | 2 | 1 | 0 | 1 | 2 | 2 | 1 | 7 | 1 | 3 | 0 | 1 | 4 |
| 11 | 8 | 4 | 3 | 2 | 1 | 0 | 1 | 5 | 3 | 3 | 1 | 0 | 1 | 4 | 3 | 2 | 1 | 0 | 1 | 4 | 3 | 2 | 1 | 0 | 1 | 3 | 2 | 8 | 0 | 8 | 1 | 0 | 5 |
| 12 | 9 | 5 | 4 | 3 | 2 | 1 | 0 | 6 | 4 | 4 | 7 | 1 | 0 | 5 | 4 | 3 | 2 | 1 | 0 | 5 | 4 | 3 | 2 | 1 | 0 | 4 | 3 | 9 | 1 | 5 | 2 | 1 | 6 |
| 13 | 4 | 0 | 1 | 2 | 3 | 4 | 5 | 1 | 1 | 1 | 3 | 4 | 5 | 0 | 1 | 2 | 3 | 4 | 5 | 0 | 1 | 2 | 3 | 4 | 5 | 1 | 2 | 4 | 4 | 0 | 3 | 4 | 1 |
| 14 | 5 | 1 | 0 | 1 | 2 | 3 | 4 | 2 | 0 | 0 | 2 | 3 | 4 | 1 | 0 | 1 | 2 | 3 | 4 | 1 | 0 | 1 | 2 | 3 | 4 | 0 | 1 | 5 | 3 | 1 | 2 | 3 | 2 |
| 15 | 6 | 2 | 1 | 0 | 1 | 2 | 3 | 3 | 1 | 1 | 1 | 2 | 3 | 2 | 1 | 0 | 1 | 2 | 3 | 2 | 1 | 0 | 1 | 2 | 3 | 1 | 0 | 6 | 2 | 2 | 1 | 2 | 3 |
| 16 | 7 | 3 | 2 | 1 | 0 | 1 | 2 | 4 | 2 | 2 | 0 | 1 | 2 | 3 | 2 | 1 | 0 | 1 | 2 | 3 | 2 | 1 | 0 | 1 | 2 | 2 | 1 | 7 | 1 | 3 | 0 | 1 | 4 |
| 17 | 8 | 4 | 3 | 2 | 1 | 0 | 1 | 5 | 3 | 3 | 1 | 0 | 1 | 4 | 3 | 2 | 1 | 0 | 1 | 4 | 3 | 2 | 1 | 0 | 1 | 3 | 2 | 8 | 0 | 8 | 1 | 0 | 5 |
| 18 | 9 | 5 | 4 | 3 | 2 | 1 | 0 | 6 | 4 | 4 | 7 | 1 | 0 | 5 | 4 | 3 | 2 | 1 | 0 | 5 | 4 | 3 | 2 | 1 | 0 | 4 | 3 | 9 | 1 | 5 | 2 | 1 | 6 |
| 19 | 4 | 0 | 1 | 2 | 3 | 4 | 5 | 1 | 1 | 1 | 3 | 4 | 5 | 0 | 1 | 2 | 3 | 4 | 5 | 0 | 1 | 2 | 3 | 4 | 5 | 1 | 2 | 4 | 4 | 0 | 3 | 4 | 1 |
| 20 | 5 | 1 | 0 | 1 | 2 | 3 | 4 | 2 | 0 | 0 | 2 | 3 | 4 | 1 | 0 | 1 | 2 | 3 | 4 | 1 | 0 | 1 | 2 | 3 | 4 | 0 | 1 | 5 | 3 | 1 | 2 | 3 | 2 |
| 21 | 6 | 2 | 1 | 0 | 1 | 2 | 3 | 3 | 1 | 1 | 1 | 2 | 3 | 2 | 1 | 0 | 1 | 2 | 3 | 2 | 1 | 0 | 1 | 2 | 3 | 1 | 0 | 6 | 2 | 2 | 1 | 2 | 3 |
| 22 | 7 | 3 | 2 | 1 | 0 | 1 | 2 | 4 | 2 | 2 | 0 | 1 | 2 | 3 | 2 | 1 | 0 | 1 | 2 | 3 | 2 | 1 | 0 | 1 | 2 | 2 | 1 | 7 | 1 | 3 | 0 | 1 | 4 |
| 23 | 8 | 4 | 3 | 2 | 1 | 0 | 1 | 5 | 3 | 3 | 1 | 0 | 1 | 4 | 3 | 2 | 1 | 0 | 1 | 4 | 3 | 2 | 1 | 0 | 1 | 3 | 2 | 8 | 0 | 8 | 1 | 0 | 5 |
| 24 | 9 | 5 | 4 | 3 | 2 | 1 | 0 | 6 | 4 | 4 | 7 | 1 | 0 | 5 | 4 | 3 | 2 | 1 | 0 | 5 | 4 | 3 | 2 | 1 | 0 | 4 | 3 | 9 | 1 | 5 | 2 | 1 | 6 |
| 25 | 5 | 1 | 0 | 1 | 2 | 3 | 4 | 2 | 0 | 0 | 2 | 3 | 4 | 1 | 0 | 1 | 2 | 3 | 4 | 1 | 0 | 1 | 2 | 3 | 4 | 0 | 1 | 5 | 3 | 1 | 2 | 3 | 2 |
| 26 | 6 | 2 | 1 | 0 | 1 | 2 | 3 | 3 | 1 | 1 | 1 | 2 | 3 | 2 | 1 | 0 | 1 | 2 | 3 | 2 | 1 | 0 | 1 | 2 | 3 | 1 | 0 | 6 | 2 | 2 | 1 | 2 | 3 |
| 27 | 0 | 4 | 5 | 6 | 7 | 8 | 9 | 3 | 5 | 5 | 7 | 8 | 9 | 4 | 5 | 6 | 7 | 8 | 9 | 4 | 5 | 6 | 7 | 8 | 9 | 5 | 6 | 0 | 8 | 4 | 7 | 8 | 3 |
| 28 | 8 | 4 | 3 | 2 | 1 | 0 | 1 | 5 | 3 | 3 | 1 | 0 | 1 | 4 | 3 | 2 | 1 | 0 | 1 | 4 | 3 | 2 | 1 | 0 | 1 | 3 | 2 | 8 | 0 | 4 | 1 | 0 | 5 |
| 29 | 4 | 0 | 1 | 2 | 3 | 4 | 5 | 1 | 1 | 1 | 3 | 8 | 5 | 0 | 1 | 2 | 3 | 8 | 5 | 0 | 1 | 2 | 3 | 8 | 5 | 1 | 2 | 4 | 4 | 0 | 3 | 4 | 1 |
| 30 | 7 | 3 | 2 | 1 | 0 | 1 | 2 | 4 | 2 | 2 | 0 | 1 | 2 | 3 | 2 | 1 | 0 | 1 | 2 | 3 | 2 | 1 | 0 | 1 | 2 | 2 | 1 | 7 | 1 | 3 | 0 | 7 | 4 |
| 31 | 8 | 4 | 3 | 2 | 1 | 0 | 1 | 5 | 3 | 3 | 1 | 0 | 1 | 4 | 3 | 2 | 1 | 0 | 1 | 4 | 3 | 2 | 1 | 0 | 1 | 3 | 2 | 8 | 0 | 4 | 7 | 0 | 5 |
| 32 | 3 | 1 | 2 | 3 | 4 | 5 | 6 | 0 | 2 | 2 | 4 | 5 | 6 | 1 | 2 | 3 | 4 | 5 | 6 | 1 | 2 | 3 | 4 | 5 | 6 | 2 | 3 | 3 | 5 | 1 | 4 | 5 | 0 |
References
- Schweitzer, F.; Bitsch, G.; Louw, L. Choosing solution strategies for scheduling automated guided vehicles in production using machine learning. Appl. Sci. 2023, 13, 806. [Google Scholar] [CrossRef]
- Fragapane, G.I.; Hvolby, H.; Sgarbossa, F.; Strandhagen, J.O. Autonomous mobile robots in hospital logistics. In Proceedings of the IFIP International Conference on Advances in Production Management Systems, Novi Sad, Serbia, 30 August–3 September 2020; Springer International Publishing: Cham, Switherland, 2020; Volume 591, pp. 672–679. [Google Scholar] [CrossRef]
- Cissé, M.; Yalçındağ, S.; Kergosien, Y.; Şahin, E.; Lenté, C.; Matta, A. OR problems related to home health care: A review of relevant routing and scheduling problems. Oper. Res. Health Care 2017, 13–14, 1–22. [Google Scholar] [CrossRef]
- Dang, Q.-V.; Nielsen, I.; Steger-Jensen, K. Mathematical formulation for mobile robot scheduling problem in a manufacturing cell. In Proceedings of the APMS 2011: Advances in Production Management Systems. Value Networks: Innovation, Technologies, and Management, Stavanger, Norway, 26–28 September 2011; Springer: Berlin/Heidelberg, Germany, 2011; Volume 384, pp. 37–44. [Google Scholar] [CrossRef]
- Dang, Q.V.; Nielsen, I.; Steger-Jensen, K.; Madsen, O. Scheduling a single mobile robot for part-feeding tasks of production lines. J. Intell. Manuf. 2014, 25, 1271–1287. [Google Scholar] [CrossRef]
- Booth, K.E.C.; Tran, T.T.; Nejat, G.; Beck, J.C. Mixed-integer and constraint programming techniques for mobile robot task planning. IEEE Robot. Autom. Let. 2017, 1, 500–507. [Google Scholar] [CrossRef]
- Jun, S.; Choi, C.H.; Lee, S. Scheduling of autonomous mobile robots with conflict-free routes utilising contextual-bandit-based local search. Int. J. Prod. Res. 2022, 60, 4090–4116. [Google Scholar] [CrossRef]
- Yang, Y. An exact price-cut-and-enumerate method for the capacitated multitrip vehicle routing problem with time windows. Transport. Sci. 2023, 57, 230–251. [Google Scholar] [CrossRef]
- Liu, S.; Wu, H.; Xiang, S.; Li, X. Mobile robot scheduling with multiple trips and time windows. Adv. Data Min. Appl. 2017, 10604, 608–620. [Google Scholar] [CrossRef]
- Liu, S.; Li, X.; Xiang, S. Vehicle scheduling with multiple trips and time windows and long planning horizon. In Proceedings of the 2018 International Conference on Intelligent Rail Transportation (ICIRT), Singapore, 12–14 December 2018; pp. 1–5. [Google Scholar]
- Yao, F.; Song, Y.J.; Zhang, Z.S.; Xing, L.N.; Ma, X.; Li, X.J. Multi-mobile robots and multi-trips feeding scheduling problem in smart manufacturing system: An improved hybrid genetic algorithm. Intell. Manuf. Robot. 2019, 16, 1–11. [Google Scholar] [CrossRef]
- Han, J.; Seo, Y. Mobile robot path planning with surrounding point set and path improvement. Appl. Soft Comput. 2017, 57, 35–47. [Google Scholar] [CrossRef]
- Nguyen, Q.V.; Colas, F.; Vincent, E.; Charpillet, F. Motion planning for robot audition. Auton. Robots 2019, 43, 2293–2317. [Google Scholar] [CrossRef]
- Charnes, A.; Cooper, W.W. Chance-constrained programming. Manag. Sci. 1959, 6, 73–79. [Google Scholar] [CrossRef]
- Li, X.; Tian, P.; Leung, S.C.H. Vehicle routing problems with time windows and stochastic travel and service times: Models and algorithm. Int. J. Prod. Econ. 2010, 125, 137–145. [Google Scholar] [CrossRef]
- Ge, X.; Jin, Y.; Zhu, Z. Electric vehicle routing problems with stochastic demands and dynamic remedial measures. Math. Probl. Eng. 2020, 2020, 8795284. [Google Scholar] [CrossRef]
- Miranda, D.M.; Conceição, S.V. The vehicle routing problem with hard time windows and stochastic travel and service time. Expert Syst. Appl. 2016, 64, 104–116. [Google Scholar] [CrossRef]
- AbdAllah, A.M.F.M.; Essam, D.L.; Sarker, R.A. On solving periodic re-optimization dynamic vehicle routing problems. Appl. Soft Comput. 2017, 55, 1–12. [Google Scholar] [CrossRef]
- De Armas, J.; Melián-Batista, B. Variable neighborhood search for a dynamic rich vehicle routing problem with time windows. Comput. Ind. Eng. 2015, 85, 120–131. [Google Scholar] [CrossRef]
- Davis, L.C. Dynamic origin-to-destination routing of wirelessly connected, autonomous vehicles on a congested network. Physica A 2017, 478, 93–102. [Google Scholar] [CrossRef]
- Liao, T.-Y.; Hu, T.-Y. An object-oriented evaluation framework for dynamic vehicle routing problems under real-time information. Expert Syst. Appl. 2011, 38, 12548–12558. [Google Scholar] [CrossRef]
- Gmira, M.; Gendreau, M.; Lodi, A.; Potvin, J.-Y. Tabu search for the time-dependent vehicle routing problem with time windows on a road network. Eur. J. Oper. Res. 2021, 288, 129–140. [Google Scholar] [CrossRef]
- Hansen, P.; Mladenović, N. Variable neighborhood search: Principles and applications. Eur. J. Oper. Res. 2001, 130, 449–467. [Google Scholar] [CrossRef]
- Hof, J.; Schneider, M.; Goeke, D. Solving the battery swap station location-routing problem with capacitated electric vehicles using an AVNS algorithm for vehicle-routing problems with intermediate stops. Transp. Res. B Methods 2017, 97, 102–112. [Google Scholar] [CrossRef]
- Sze, J.F.; Salhi, S.; Wassan, N. The cumulative capacitated vehicle routing problem with min-sum and min-max objectives: An effective hybridisation of adaptive variable neighbourhood search and large neighbourhood search. Transp. Res. B Methods 2017, 101, 162–184. [Google Scholar] [CrossRef]
- Mladenovi, N.; Hansen, P. Variable neighborhood search. Comput. Oper. Res. 1997, 24, 1097–1100. [Google Scholar] [CrossRef]
- Smiti, N.; Dhiaf, M.M.; Jarboui, B.; Hanafi, S. Skewed general variable neighborhood search for the cumulative capacitated vehicle routing problem. Int. T. Oper. Res. 2018, 27, 651–664. [Google Scholar] [CrossRef]
- Chagas, J.B.C.; Silveira, U.E.F.; Santos, A.G.; Souza, M.J.F. A variable neighborhood search heuristic algorithm for the double vehicle routing problem with multiple stacks. Int. Trans. Oper. Res. 2020, 27, 112–137. [Google Scholar] [CrossRef]
- Zhang, S.; Chen, M.; Zhang, W. A novel location-routing problem in electric vehicle transportation with stochastic demands. J. Clean. Prod. 2019, 221, 567–581. [Google Scholar] [CrossRef]
- Mladenović, N.; Todosijević, R.; Urošević, D. An efficient general variable neighborhood search for large travelling salesman problem with time windows. Yugoslav J. Oper. Res. 2013, 23, 19–30. [Google Scholar] [CrossRef]
- Mjirda, A.; Todosijević, R.; Hanafi, S.; Hansen, P.; Mladenović, N. Sequential variable neighborhood descent variants: An empirical study on the traveling salesman problem. Int. T. Oper. Res. 2016, 24, 615–633. [Google Scholar] [CrossRef]
- Belošević, I.; Ivić, M. Variable neighborhood search for multistage train classification at strategic planning level. Comput-Aided Civ. Inf. 2018, 33, 220–242. [Google Scholar] [CrossRef]
- Chakrabortty, R.K.; Abbasi, A.; Ryan, M.J. Multi-mode resource-constrained project scheduling using modified variable neighborhood search heuristic. Int. T. Oper. Res. 2020, 27, 138–167. [Google Scholar] [CrossRef]
- Frifita, S.; Masmoudi, M. VNS methods for home care routing and scheduling problem with temporal dependencies, and multiple structures and specialties. Int. T. Oper. Res. 2020, 27, 291–313. [Google Scholar] [CrossRef]
- Ehmke, J.F.; Campbell, A.M.; Urban, T.L. Ensuring service levels in routing problems with time windows and stochastic travel times. Eur. J. Oper. Res. 2015, 240, 539–550. [Google Scholar] [CrossRef]
- Nadarajah, S.; Kotz, S. Exact distribution of the max/min of two Gaussian random variables. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2008, 16, 210–212. [Google Scholar] [CrossRef]
- Savelsbergh, M.W.P. Local search in routing problems with time windows. Ann. Oper. Res. 1985, 4, 285–305. [Google Scholar] [CrossRef]
- Cai, J.; Zhu, Q.; Lin, Q. Variable neighborhood search for a new practical dynamic pickup and delivery problem. Swarm Evol. Comput. 2022, 75, 101182. [Google Scholar] [CrossRef]
- Glover, F. Future paths for integer programming and links to artificial intelligence. Comput. Oper. Res. 1986, 13, 533–549. [Google Scholar] [CrossRef]








| Parameter | Description |
|---|---|
| the set of starting points of AMRs | |
| the set of ending points of AMRs | |
| the set of request points | |
| the set of charging stations | |
| number of AMRs participating in medical request services | |
| demand of request | |
| the time window of request | |
| capacity of AMRs | |
| service time of request | |
| the distance between any two medical requests and | |
| their floor difference between any two medical requests and | |
| the travel time from request to request | |
| the time when the AMR arrives at the request on the route | |
| the time when the AMR starts service request on the route | |
| the lower bound of the AMR battery level | |
| the upper bound of the AMR battery level | |
| electricity consumption rate, i.e., the AMR consumes percent of its fully charged battery level if it runs a unit time | |
| the charging rate of AMRs, i.e., the AMR increases percent of its fully charged battery level if it is charged for a second | |
| the remaining battery level of the AMR when it arrives at request (or depot) on its route | |
| the remaining capacity of the AMR when it arrives at request on its route | |
| any infinite large number | |
| the daily fixed cost of each AMR | |
| the unit travel cost of the AMR | |
| the penalty cost for violating the time window | |
| the probability that the time window is violated | |
| binary decision variable, i.e., | |
| Parameter | Specification |
|---|---|
| Running Speed | |
| Full Battery Capacity Level | |
| Electricity Consumption Rate | |
| Charging Rate |
| Distance | Depot | Requests | Charging Station | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | |||
| 0 | 100 | 150 | 110 | 100 | 120 | 110 | 110 | 120 | 100 | 110 | 150 | 100 | 0 | |
| 1 | 100 | 0 | 120 | 80 | 110 | 100 | 90 | 90 | 100 | 110 | 80 | 120 | 0 | 100 |
| 2 | 150 | 120 | 0 | 80 | 80 | 70 | 100 | 100 | 70 | 80 | 80 | 0 | 120 | 150 |
| 3 | 110 | 80 | 80 | 0 | 100 | 70 | 80 | 80 | 70 | 100 | 0 | 80 | 80 | 110 |
| 4 | 100 | 110 | 80 | 100 | 0 | 120 | 110 | 110 | 120 | 0 | 100 | 80 | 110 | 100 |
| 5 | 120 | 100 | 70 | 70 | 120 | 0 | 100 | 100 | 0 | 120 | 70 | 70 | 100 | 120 |
| 6 | 110 | 90 | 100 | 80 | 110 | 100 | 0 | 0 | 100 | 110 | 80 | 100 | 90 | 110 |
| 7 | 110 | 90 | 100 | 80 | 110 | 100 | 0 | 0 | 100 | 110 | 80 | 100 | 90 | 110 |
| 8 | 120 | 100 | 70 | 70 | 120 | 0 | 100 | 100 | 0 | 120 | 70 | 70 | 100 | 120 |
| 9 | 100 | 110 | 80 | 100 | 0 | 120 | 110 | 110 | 120 | 0 | 100 | 80 | 110 | 100 |
| 10 | 110 | 80 | 80 | 0 | 100 | 70 | 80 | 80 | 70 | 100 | 0 | 80 | 80 | 110 |
| 11 | 150 | 120 | 0 | 80 | 80 | 70 | 100 | 100 | 70 | 80 | 80 | 0 | 120 | 150 |
| 12 | 100 | 0 | 120 | 80 | 110 | 100 | 90 | 90 | 100 | 110 | 80 | 120 | 0 | 100 |
| 0 | 100 | 150 | 110 | 100 | 120 | 110 | 110 | 120 | 100 | 110 | 150 | 100 | 0 | |
| Floor | Depot | Requests | Charging Station | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | |||
| 0 | 1 | 6 | 2 | 5 | 3 | 4 | 4 | 3 | 5 | 2 | 6 | 1 | 0 | |
| 1 | 1 | 0 | 5 | 1 | 4 | 2 | 3 | 3 | 2 | 4 | 1 | 5 | 0 | 1 |
| 2 | 6 | 5 | 0 | 4 | 1 | 3 | 2 | 2 | 3 | 1 | 4 | 0 | 5 | 6 |
| 3 | 2 | 1 | 4 | 0 | 3 | 1 | 2 | 2 | 1 | 3 | 0 | 4 | 1 | 2 |
| 4 | 5 | 4 | 1 | 3 | 0 | 2 | 1 | 1 | 2 | 0 | 3 | 1 | 4 | 5 |
| 5 | 3 | 2 | 3 | 1 | 2 | 0 | 1 | 1 | 0 | 2 | 1 | 3 | 2 | 3 |
| 6 | 4 | 3 | 2 | 2 | 1 | 1 | 0 | 0 | 1 | 1 | 2 | 2 | 3 | 4 |
| 7 | 4 | 3 | 2 | 2 | 1 | 1 | 0 | 0 | 1 | 1 | 2 | 2 | 3 | 4 |
| 8 | 3 | 2 | 3 | 1 | 2 | 0 | 1 | 1 | 0 | 2 | 1 | 3 | 2 | 3 |
| 9 | 5 | 4 | 1 | 3 | 0 | 2 | 1 | 1 | 2 | 0 | 3 | 1 | 4 | 5 |
| 10 | 2 | 1 | 4 | 0 | 3 | 1 | 2 | 2 | 1 | 3 | 0 | 4 | 1 | 2 |
| 11 | 6 | 5 | 0 | 4 | 1 | 3 | 2 | 2 | 3 | 1 | 4 | 0 | 5 | 6 |
| 12 | 1 | 0 | 5 | 1 | 4 | 2 | 3 | 3 | 2 | 4 | 1 | 5 | 0 | 1 |
| 0 | 1 | 6 | 2 | 5 | 3 | 4 | 4 | 3 | 5 | 2 | 6 | 1 | 0 | |
| Request | Demand | Time Window |
|---|---|---|
| 1 | 4 | [8:10, 8:20] |
| 2 | 4 | [8:10, 8:20] |
| 3 | 4 | [8:10, 8:20] |
| 4 | 4 | [8:10, 8:20] |
| 5 | 4 | [8:40, 8:50] |
| 6 | 4 | [8:40, 8:50] |
| 7 | 4 | [10:10, 11:00] |
| 8 | 4 | [10:10, 11:00] |
| 9 | 4 | [10:40, 11:00] |
| 10 | 4 | [10:40, 11:00] |
| 11 | 4 | [10:40, 11:00] |
| 12 | 4 | [10:40, 11:00] |
| Time (s) | ||||
|---|---|---|---|---|
| 800 | 3 | 1100 | 101.00 | 2.17 |
| 1000 | 2 | 1230 | 72.30 | 2.36 |
| 2000 | 2 | 1220 | 72.20 | 2.68 |
| 4000 | 2 | 1190 | 71.90 | 2.93 |
| 5000 | 2 | 1190 | 71.90 | 3.10 |
| Instance | CPLEX | VNS | Gap (%) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Time (s) | Time (s) | |||||||||||||
| Best | Avg | Best | Avg | Best | Avg | |||||||||
| R101-15 | 12 | 248.91 | 1800 | 362.48 | 12 | 12 | 603 | 611.0 | 31.06 | 32.03 | 366.02 | 366.11 | 0.02 | −0.66 |
| R201-15 | 3 | 327.35 | 12.53 | 93.27 | 3 | 3.6 | 397.4 | 378.1 | 24.59 | 25.05 | 93.97 | 111.78 | 15.9 | −0.75 |
| C101-15 | 4 | 104.80 | 1800 | 121.04 | 4 | 4.6 | 220 | 270.1 | 25.37 | 26.17 | 122 | 140.7 | 13.2 | −0.95 |
| C201-15 | 2 | 189.26 | 8.47 | 61.89 | 2 | 2.6 | 211.2 | 245.3 | 23.16 | 24.84 | 62.11 | 80.45 | 22.7 | −0.35 |
| RC102-15 | 12 | 186.94 | 1800 | 361.86 | 12 | 12.2 | 868.2 | 881.1 | 30.69 | 31.44 | 368.6 | 374.8 | 1.65 | −1.88 |
| RC201-15 | 3 | 198.30 | 12.51 | 91.98 | 3 | 3.2 | 310 | 350 | 22.42 | 23.97 | 93.10 | 99.50 | 6.43 | −1.22 |
| Average | ----- | 10.0 | −0.96 | |||||||||||
| Instance | TS | VNS | |||||
|---|---|---|---|---|---|---|---|
| R101 | 87 | 121.92 | 2731.93 | 87 | 122.2 | 2732.2 | 0.01 |
| R201 | 47 | 82.791 | 1492.79 | 47 | 83.59 | 1493.6 | 0.05 |
| C101 | 62 | 148.6 | 2008.6 | 62 | 145.3 | 2005.3 | −0.16 |
| C201 | 37 | 109.8 | 1219.8 | 35 | 118.6 | 1168.6 | −4.38 |
| RC102 | 87 | 148.31 | 2758.31 | 86 | 147.1 | 2727.1 | −1.14 |
| RC201 | 51 | 108.9 | 1638.9 | 50 | 107.8 | 1607.8 | −1.93 |
| Average | 61.83 | 120.05 | 1975.1 | 61.2 | 120.7 | 1955.8 | −1.26 |
| 1 | 2 | 1190 | 71.9 |
| 10 | 2 | 1190 | 71.9 |
| 100 | 4 | 1180 | 131.8 |
| Distance | |||||
|---|---|---|---|---|---|
| Number of AMRs | 2 | 2 | 4 | 4 | 8 |
| Charging Times | 0 | 0 | 0 | 0 | 1 |
| AMR No. | Service Route | Distance (m) | Load (kg) | Number of Charges | Mean Arrival Time of Requests |
|---|---|---|---|---|---|
| 1 | ① 061292759306226580 | 506 | 16 | 0 | 10:20:00-10:30:35-10:55:50-11:20:22-11:25:22-11:32:56-11:37:56-11:45:14-11:50:14-12:00:31 |
| ② 05375624647393851190 | 692 | 20 | 0 | 12:05:31-12:09:53-12:14:53-12:22:50-12:27:50-12:36:23-12:42:47-12:47:47-12:55:45-13:03:52-13:08:52-13:18:24 | |
| ③ 03233155230 | 474 | 10 | 1 | 13:23:24-13:28:24-13:47:55-13:55:54-14:00:54-14:08:59-14:13:59-14:23:41 | |
| 2 | ① 0602857250 | 437 | 8 | 0 | 10:35:00-10:50:23-10:55:23-11:02:46-11:07:46-11:18:01 |
| ② 091015471244164811430 | 604 | 20 | 1 | 11:23:01-11:33:01-11:40:29-11:47:14-11:55:14-12:00:14-12:08:19-12:13:19-12:21:21-12:26:21-12:34:21-12:39:21-12:46:49 | |
| ③ 04214462052185063420 | 670 | 20 | 0 | 12:56:49-13:04:17-13:12:20-13:17:20-13:23:50-13:28:50-13:37:10-13:42:10-13:48:20-13:56:05-14:01:05-14:10:20 | |
| 3 | ① 04513532117494131630 | 926 | 18 | 1 | 11:00:00-11:06:10-11:11:10-11:25:39-11:30:39-11:38:54-11:43:54-11:51:59-12:04:03-12:09:03-12:17:20-12:22:20 |
| ② 040843633522540 | 498 | 16 | 0 | 12:27:20-12:27:20-12:34:48-12:39:48-12:47:34-12:52:34-13:00:11-13:05:11-13:13:08-13:18:08-13:25:49-13:30:49 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, L.; Zhao, N.; Wu, K.; Chen, Z. The Multi-Trip Autonomous Mobile Robot Scheduling Problem with Time Windows in a Stochastic Environment at Smart Hospitals. Appl. Sci. 2023, 13, 9879. https://doi.org/10.3390/app13179879
Cheng L, Zhao N, Wu K, Chen Z. The Multi-Trip Autonomous Mobile Robot Scheduling Problem with Time Windows in a Stochastic Environment at Smart Hospitals. Applied Sciences. 2023; 13(17):9879. https://doi.org/10.3390/app13179879
Chicago/Turabian StyleCheng, Lulu, Ning Zhao, Kan Wu, and Zhibin Chen. 2023. "The Multi-Trip Autonomous Mobile Robot Scheduling Problem with Time Windows in a Stochastic Environment at Smart Hospitals" Applied Sciences 13, no. 17: 9879. https://doi.org/10.3390/app13179879
APA StyleCheng, L., Zhao, N., Wu, K., & Chen, Z. (2023). The Multi-Trip Autonomous Mobile Robot Scheduling Problem with Time Windows in a Stochastic Environment at Smart Hospitals. Applied Sciences, 13(17), 9879. https://doi.org/10.3390/app13179879