1. Introduction
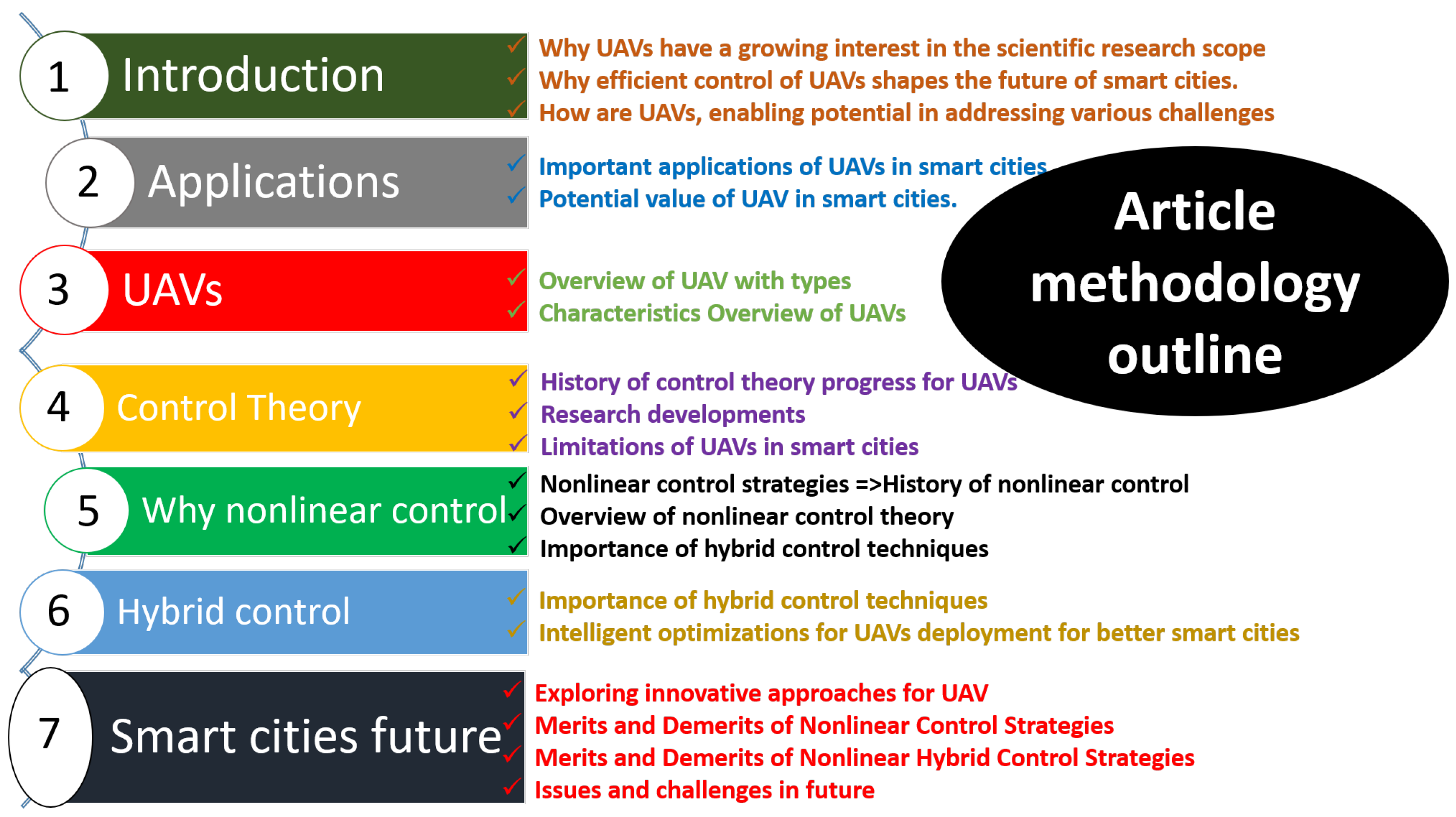
To define the scope of the survey article, the research question or objective that the survey aims to address and the methodology are outlined in
Figure 1. Optimizing age and power consumption in Internet of Things (IoT) applications using unmanned aerial vehicles (UAVs) and their battery recharge is a crucial undertaking for the development of future smart cities [
1]. Optimizing the flight paths of UAVs to minimize age and power consumption, while ensuring comprehensive data coverage, holds significant importance. Leveraging UAVs for environmental monitoring presents both challenges and opportunities, particularly in collecting data from remote or inaccessible regions. The effectiveness of UAV systems has been exemplified through various case studies, showcasing their potential impact [
2]. Efficient control of UAVs plays a crucial role in the betterment of smart cities. UAVs equipped with advanced control systems can efficiently navigate through urban environments, collecting high-quality data from various sensors. This data is invaluable for smart city applications, such as traffic management, environmental monitoring, and infrastructure assessment. By controlling UAVs effectively, cities can gather accurate and real-time information, enabling informed decision-making and proactive interventions [
3,
4]. UAVs with efficient control algorithms can optimize the use of available resources in smart cities. For instance, they can monitor utility networks, detect leakages or faults, and assist in maintenance activities. By identifying inefficiencies and potential problems promptly, cities can improve the reliability and sustainability of critical infrastructure systems like water supply, electricity grids, and waste management. UAVs with precise control capabilities can be deployed for surveillance and security purposes in smart cities. They can monitor crowded areas, identify suspicious activities, and provide real-time situational awareness to law enforcement agencies [
5]. With efficient control, UAVs can navigate complex urban environments, maintain stable flight paths, and quickly respond to emerging security threats. During emergencies such as natural disasters or accidents, UAVs with efficient control systems can be deployed for rapid response and rescue operations. They can quickly reach inaccessible or hazardous areas, assess the situation, and provide critical information to emergency responders. By streamlining rescue efforts and improving coordination, efficient control of UAVs can save lives and minimize damage in smart cities. UAVs can play a significant role in improving transportation systems within smart cities. With efficient control algorithms, they can support traffic management, monitor congestion, and provide real-time data for route optimization. UAVs can also facilitate last-mile delivery services, reducing traffic congestion and enhancing efficiency in urban logistics [
6].
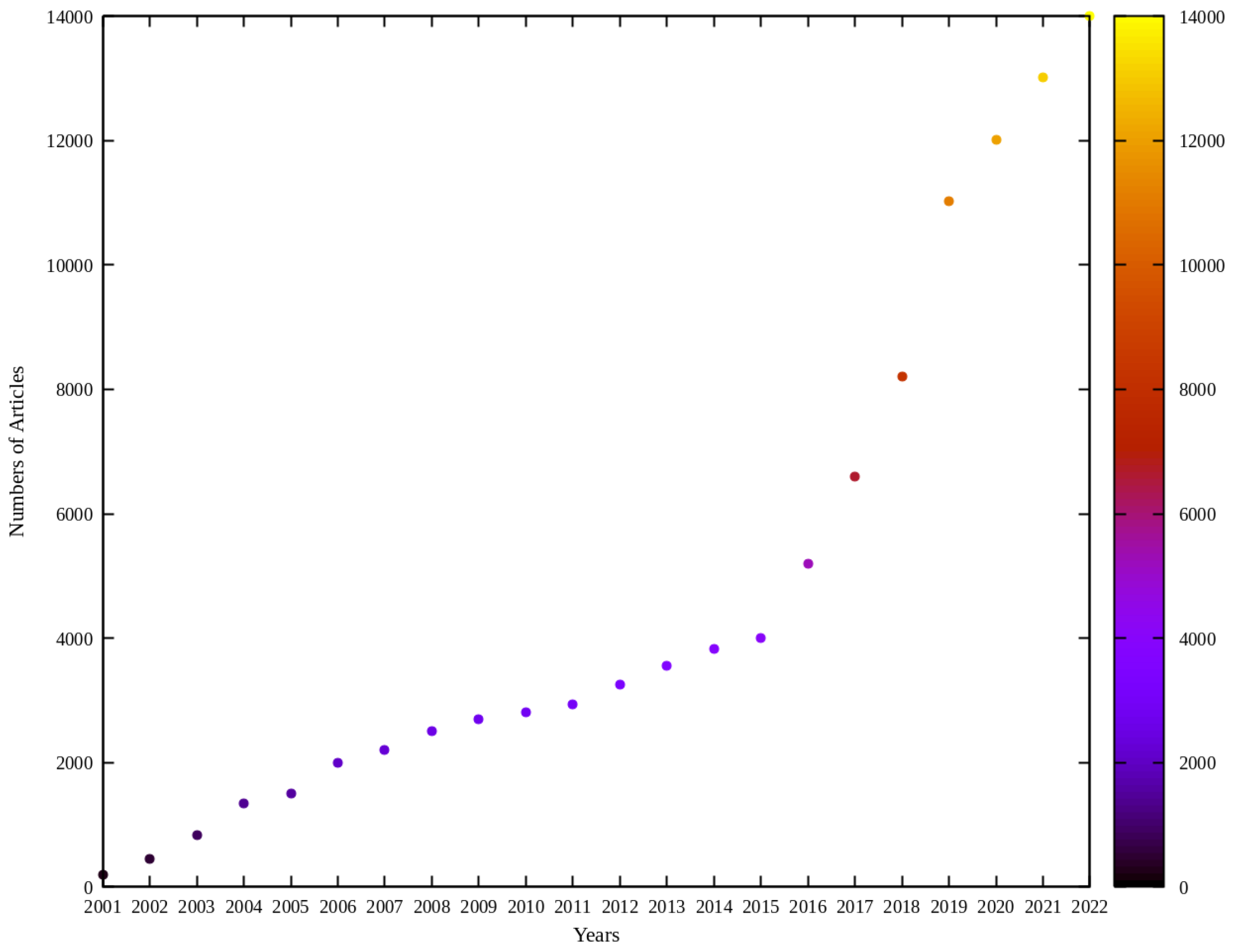
UAVs have emerged as a highly significant technology in the geoscience and remote sensing fields over the past twenty years. They have gained popularity across various applications and have often replaced other platforms due to their versatility and relatively affordable costs. This rise in prominence is evident from the substantial number of scientific papers dedicated to UAVs published across different research communities during this period. According to Scopus, more than 80,000 papers have been published since 2001 using terms like “UAV”, “drone”, “UAS”, and “RPAS” in the title or keywords (
Figure 2). The majority of these publications are within the engineering and computer science domains [
7]. This growing interest in UAVs from the scientific community is not limited to a single citation indexing database, as other databases also reflect this trend. Furthermore, the UAV business has experienced significant financial growth, with a valuation of several billion dollars per year. Although the majority of the market is currently focused on military applications, the future prospects for UAVs are promising. Economic interests, technological advancements, the miniaturization of onboard sensors, and the development of new algorithms and software have collectively driven the emergence of new applications, which in turn have created new business opportunities. While UAV surveying applications were the initial focus, more advanced applications have emerged, leading to new requirements and further expanding the scope of UAV utilization. Notably, UAV systems capable of rapid, automated, and autonomous geospatial data collection are making significant contributions to the ongoing fourth industrial revolution [
8]. Indeed, new and emerging applications of UAVs continue to expand across various industries. Construction and infrastructure monitoring are prime examples of how UAVs are being utilized for aerial inspections, progress tracking, and site surveillance in construction projects. They offer efficient and cost-effective means of obtaining high-resolution imagery, collecting data, and monitoring project developments.
Control theory (nonlinear, linear, intelligent control, and hybrid control) is important for UAVs in smart cities. UAVs, or drones, play a crucial role in various applications within smart cities, such as surveillance, delivery services, and infrastructure inspection. Control theory provides the foundation for designing and implementing control algorithms that enable UAVs to navigate, stabilize, and perform tasks autonomously.
In smart cities, UAVs need to operate in complex and dynamic environments, where they must adapt to changing conditions and interact with other systems. Control theory helps in developing control strategies that allow UAVs to respond to environmental changes, avoid obstacles, optimize energy consumption, and ensure safe and efficient operations. Efficient control is essential for UAVs in smart cities as it enables them to operate autonomously, adapt to changing conditions, and perform tasks with precision and efficiency. This review article focuses on the contribution of efficient UAV control in optimizing age and power consumption in IoT applications. Below, you will find a comprehensive analysis based on the literature of the proposed research, highlighting key ideas for promoting the future of smart cities based on control actions of a controller:
Its application ensures the safe, efficient, and reliable operation of UAVs, enabling them to fulfill their potential in transforming urban landscapes and addressing various challenges for a smarter, more sustainable future.
2. Important Applications of UAVs in Smart Cities
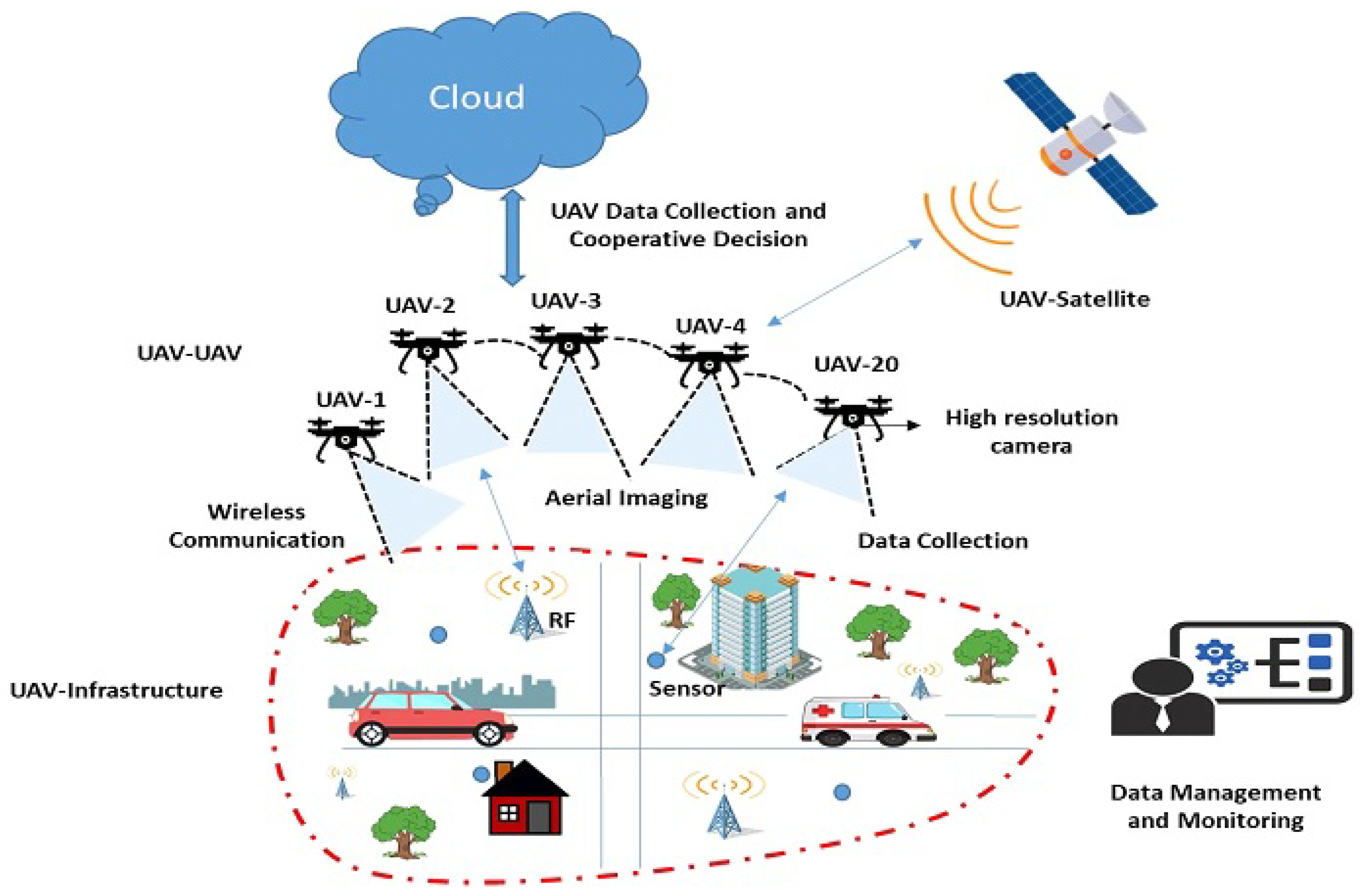
UAV infrastructure in smart cities provides a cost-effective and efficient means of data collection, monitoring, surveillance, and infrastructure assessment. They contribute to better urban planning, resource management, emergency response, public safety, and sustainable development, ultimately improving the quality of life for city residents represented in
Figure 3.
UAVs equipped with sensors, cameras, or other data collection devices can capture high-resolution imagery, perform aerial surveys, and collect various types of data. This data is invaluable for urban planning, infrastructure management, environmental monitoring, and decision-making processes in smart cities. UAVs enable efficient and cost-effective data collection, providing accurate and up-to-date information. Drones can inspect critical infrastructure, such as bridges, buildings, power lines, and pipelines. They can reach inaccessible or hazardous areas, allowing for quick and accurate assessment of structural integrity, identification of maintenance needs, and detection of damage or potential risks. Regular inspections using UAVs enhance safety, reduce maintenance costs, and improve the lifespan of infrastructure. Drones are valuable tools in emergency situations. They can be quickly deployed to assess disaster-affected areas, search for missing persons, and provide situational awareness to emergency responders. UAVs equipped with thermal sensors can detect hotspots in fires or identify people in need of rescue. Additionally, they can deliver emergency supplies to remote or inaccessible locations, improving response times and saving lives. UAVs enable efficient monitoring of environmental parameters such as air quality, pollution levels, temperature, and vegetation health. This data aids in identifying environmental challenges, assessing the impact of urban activities, and implementing sustainable solutions. UAVs can support environmental planning, pollution control, and conservation efforts in smart cities. Delivery drones offer an efficient and environmentally friendly alternative for transporting goods within smart cities [
17,
18]. They can navigate congested areas more easily and reach destinations faster, enabling quick and convenient delivery of packages, medical supplies, or emergency response materials. Delivery drones contribute to reducing traffic congestion, lowering carbon emissions, and enhancing logistics operations.
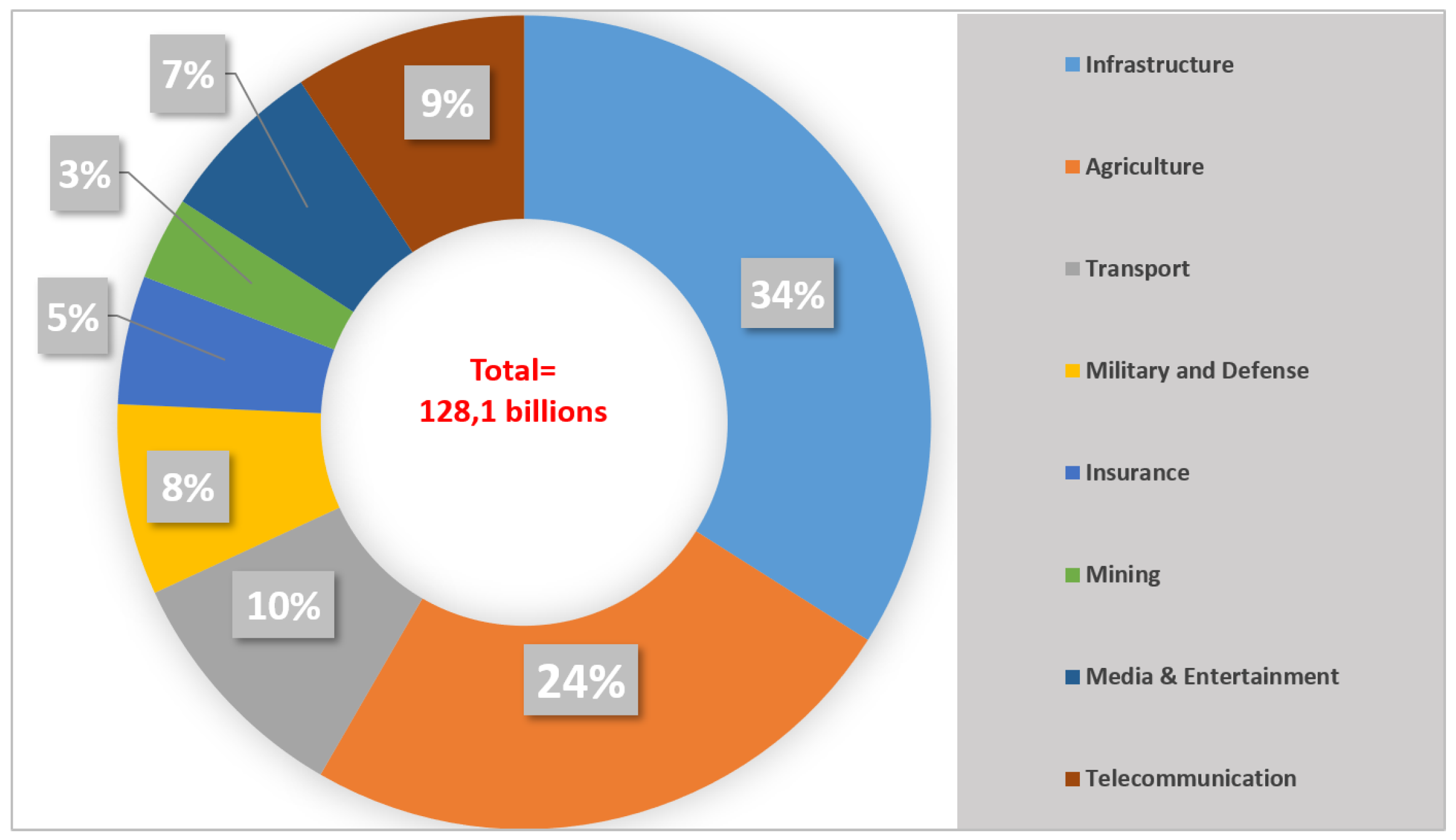
The advancements in electronics and manufacturing processes have allowed for the miniaturization of controllers, sensors, and processors while retaining their effectiveness. This breakthrough has given rise to compact configurations of UAVs. The potential inherent in this size reduction is vast and offers numerous advantages. In 2016, PwC published the report “Clarity from Above”, revealing that the addressable market value of drone-powered solutions exceeds USD 127 billion, indicating that the drone revolution is causing significant disruptions across a wide range of industries [
19].
Figure 4 provides a schematic representation of the estimated value for some key industries. UAVs, commonly known as drones, have a wide range of applications across various fields due to their versatility, efficiency, and ability to access hard-to-reach areas. Here are some of the key applications of UAVs in different sectors:
2.1. Agriculture
Drones are used for precision agriculture. They can monitor crop health, track livestock, and even assist in planting and spraying crops. They can provide detailed aerial imagery that helps farmers make informed decisions about their crops and livestock [
21].
2.2. Construction and Infrastructure
Drones are used for surveying land, inspecting structures, and monitoring construction progress. They can provide high-resolution images and videos that can help in planning, monitoring, and inspecting construction sites [
20].
2.3. Disaster Management
Drones can be used in disaster management for search and rescue operations, damage assessment, and delivering emergency supplies. They can reach areas that are difficult or dangerous for humans to access [
22].
2.4. Environmental Monitoring and Conservation
Drones are used for wildlife monitoring, forest conservation, and environmental research. They can collect data on wildlife populations, track animal movements, and monitor environmental changes [
23].
2.5. Delivery Services
Companies like Amazon and Google are testing drones for delivering goods to customers. Drones can potentially make deliveries faster and more efficient, especially in congested urban areas [
24].
2.6. Media and Entertainment
Drones are used for aerial photography and videography in films, news coverage, and sports events. They can capture unique angles and perspectives that would be difficult or impossible to achieve with traditional cameras [
25].
2.7. Military and Defense
Drones are used for surveillance, reconnaissance, and combat missions. They can gather intelligence, carry out strikes, and perform other tasks without putting human lives at risk [
26].
2.8. Healthcare
Drones are being explored for transporting medical supplies, especially to remote or hard-to-reach areas. They can deliver medicines, vaccines, blood samples, and other medical supplies quickly and efficiently [
27].
2.9. Scientific Research
Drones are used in various scientific research fields, including meteorology, geology, and archaeology. They can collect data in hazardous or inaccessible areas, making them a valuable tool for researchers [
28].
2.10. Real Estate
Drones are used in the real estate industry to capture aerial views of properties. This provides potential buyers with a better perspective of the property, its surroundings, and features like the roof that is difficult to inspect from the ground [
29].
Understanding the types and characteristics of UAVs is essential for comprehending their capabilities and operation means that in order to fully grasp what UAVs are capable of doing and how they function, it is crucial to have knowledge about their specific qualities and physical makeup.
3. Types and Characteristics of UAVs
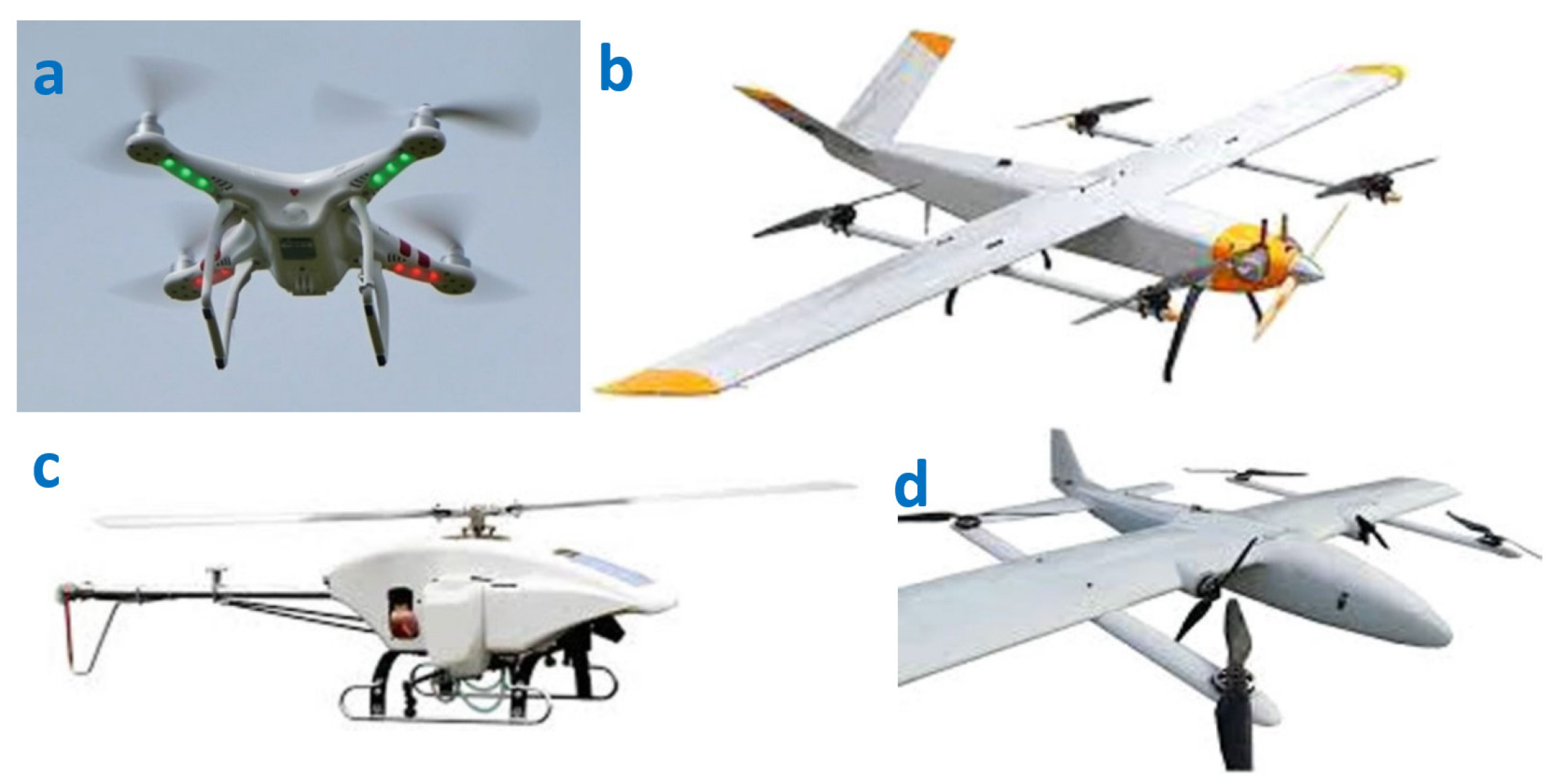
Different types of UAVs are important for various applications due to their unique capabilities and features. The choice of any particular drone depends on the purpose of such a drone. Studying the types of UAVs regarding their structure is important for understanding their applications in society. The structure of a UAV can greatly impact its capabilities, performance, and suitability for different tasks [
28]. Different types of UAVs have varying designs, such as fixed-wing, rotary-wing (e.g., helicopters), and hybrid configurations as mentioned in
Figure 5. Each type has its own advantages and limitations, making them suitable for specific applications. For example, fixed-wing UAVs are known for their long endurance and high-speed capabilities, making them suitable for tasks such as aerial mapping, surveillance, and cargo delivery over long distances. Rotary-wing UAVs, on the other hand, offer vertical takeoff and landing capabilities, making them ideal for tasks that require hovering, maneuverability, and close-range operations, such as aerial photography, search and rescue, and inspection of infrastructure [
30].
By studying the structure of UAVs, researchers, and engineers can better understand the capabilities and limitations of different types of UAVs, enabling them to design and develop UAVs that are optimized for specific applications. This knowledge is crucial for advancing the field of UAV technology and maximizing their potential benefits in various sectors, including agriculture, transportation, environmental monitoring, disaster management, and more. A short overview of UAVs based on their types is provided in
Table 1. It is important to note that UAV technology continues to evolve rapidly, and new features and characteristics are constantly being developed and integrated into these systems. UAVs are typically operated and controlled by a remote pilot on the ground or can even operate autonomously using pre-programmed flight paths [
31]. The remote pilot uses a control station to maneuver the drone and make decisions regarding its flight. UAVs do not carry any human pilots onboard, which makes them autonomous and capable of operating in environments that may be dangerous or inaccessible for manned aircraft. Studying the types of UAVs regarding their characteristics is highly important for understanding their capabilities, limitations, and applications. The characteristics of UAVs encompass various aspects that influence their performance, functionality, and suitability for specific tasks [
32]. By taking concentration on the characteristics of UAVs, researchers, engineers, and operators can make informed decisions about which type of UAV is best suited for a particular application. This knowledge helps optimize UAV selection, design, and operation, leading to more efficient and effective use of UAV technology in various industries, including agriculture, construction, environmental monitoring, and public safety [
33]. The characteristics of UAVs are elaborated in
Table 2.
Table 1.
Overview of UAV with types [
29].
Table 1.
Overview of UAV with types [
29].
| UAV Type | Applications | Advantages | Drawbacks |
|---|
| photography filmography inspection
| hovering availability low price
| short flight time small payload
|
| structural inspection area survey supply drops
| | |
| | | high price short flight time low stability in wind dangerous
|
| structural inspection area survey
| | |
Table 2.
Characteristics overview of UAVs [
33].
Table 2.
Characteristics overview of UAVs [
33].
| Characteristics | Fixed Wing | Rotary Wing | Hybrid |
|---|
| Energy efficiency | High | Low | High |
| Flight system | Complicated | Simple | Complicated |
| Landing | Conventional | Vertical | Vertical |
| Autonomy | No | Yes | Yes |
| Hovering | No | Yes | Yes |
| Power supply | Battery, fuel | Battery | Battery, fuel |
| Endurance | 60–3000 m | 6–180 m | 180–480 m |
| Payload | 1000 kg | 50 kg | 10 kg |
| Weight | 0.1–400,000 kg | 0.01–100 kg | 1.5–65 kg |
Controlling UAVs using nonlinear control strategies can be highly important and beneficial in certain situations. Nonlinear control approaches offer advantages over traditional linear control methods by accounting for the nonlinear dynamics and uncertainties present in UAV systems.
4. Control Theory Progress for UAVs
The availability of low-cost inertial measurement units (IMUs) has enabled the development of various miniature UAVs. One of the most recent and interesting UAVs is the twin-rotor MIMO system (TRMS), which is capable of vertical takeoff and landing (VTOL). UAV systems have a hovering capability that makes them superior to fixed-wing systems, which cannot hover and are unsuitable for environments that require stationary or quasi-stationary flights. UAV systems have extensive military and civil applications and have attracted significant funding and research interest from various communities. In the last decade, several researchers have completed projects on UAVs. These systems have found utility in a wide range of applications including surveillance, aerial photography, building exploration, climate forecasting, bridge inspection, 3D mapping, swarm missions, and numerous other use cases [
19,
34].
UAVs have become increasingly important in a variety of control applications due to their flexibility, mobility, and ability to operate in remote or hazardous environments. UAVs have versatile applications, encompassing surveillance, search and rescue operations, inspection tasks, mapping initiatives, agricultural practices, and delivery services. UAVs are also useful in industrial control applications, such as monitoring and controlling chemical plants or power generation facilities [
35,
36]. One of the main advantages of UAVs for control applications is their ability to provide real-time data and feedback. UAVs can be equipped with a variety of sensors, including cameras, thermal imagers, LiDAR, and gas sensors, among others, that can provide data on temperature, pressure, air quality, and other environmental variables. This data can be used for control applications, such as monitoring the progress of a search and rescue mission, detecting gas leaks in a chemical plant, or assessing the health of crops in an agricultural field [
37].
One important benefit of nonlinear UAVs is their ability to operate in complex, dynamic environments. Nonlinear control algorithms can help UAVs adapt to changing conditions and respond quickly to unexpected disturbances, allowing them to navigate through cluttered or congested environments, avoid obstacles, and track moving targets with greater precision [
38]. This adaptability and agility are particularly important in modern warfare scenarios, such as the conflict in Ukraine, where UAVs have played an increasingly prominent role. In Ukraine, both sides have deployed a range of UAVs for surveillance, reconnaissance, and attack missions, and these vehicles have demonstrated their effectiveness in gathering intelligence, targeting enemy positions, and disrupting enemy operations [
39]. Nonlinear UAVs offer several advantages in this context, including their ability to operate in GPS-denied or jammed environments, their resistance to detection and interception, and their ability to perform complex maneuvers and fly at high speeds with greater stability and accuracy. Overall, the importance of nonlinearities in UAVs reflects the growing importance of these vehicles in modern warfare and the need for advanced control and navigation systems that can help them operate effectively in complex and unpredictable environments [
40].
A helicopter is an aircraft that is lifted and moved by one or more rotors, which are typically arranged in an even number. The key advantage of a helicopter lies in its capability to control lift and direction by modulating the rotor speed using motors. This makes helicopters particularly useful in congested or remote areas where fixed-wing aircraft are unable to take off or land. In order for the closed-loop system to achieve the desired response, it must manipulate the controlling variables through control action. The experimental setup for a prototype helicopter involves various components and instruments that are used to test and evaluate the performance, stability, control, and other characteristics of the UAV [
38,
41]. To model this coupling effect, the dynamics of the UAV must be represented using a set of equations that capture the interactions between the different degrees of freedom. These equations typically include terms that describe the forces and moments acting on the UAV as a result of its motion through the air, as well as terms that capture the effects of the rotor dynamics and control inputs [
41]. The UAV setup described above is a system with limited degrees of freedom that is highly nonlinear in nature. It consists of two primary components: a mechanical component (consisting of the main rotor and tail rotor) and an electrical component (comprised of DC motors for both rotors). The mechanical component, which is susceptible to various perturbations, is the primary focus. The main rotor, which controls pitch angle, allows for motion along the vertical axis (in the vertical plane), while the tail rotor, which controls yaw angle, enables motion along the horizontal axis (in the horizontal plane). To regulate the UAV in the presence of coupling effects, a linear controller is implemented, complete with all of its requisite attributes, as expressed in the system’s equations [
23,
41].
Variable structure systems (VSSs) have long piqued the interest of the control engineering community because of their significant nonlinear behavior, dynamical changes over time, coupling influences, and susceptibility to parametric disturbances when treated as controllers. Due to matched and mismatched disturbances, controlling unmanned aerial vehicles (UAVs) can be particularly difficult, and
Table 3 represents the challenges and tasks of our research. These technologies are interesting because regular security services and security missions increasingly utilize them in a variety of contexts [
42]. TRMS is a class of UAVs that have drawn interest because of their capacity to hover, take off, and land in unexpected places, as well as tilt their angle of flight. Control researchers must overcome the strong coupling, nonlinear dynamics, ambiguities, and gyroscopic torque of UAVs. Applications for these systems are growing in a variety of sectors [
35,
42]. Rotor rotation, the linkage between rotors, fluctuating propeller rotation speed, susceptibility to parametric perturbations, and the time-varying character of the system are the key difficulties in UAVs [
43]. Comprehensive details regarding nonlinear control theory for UAVs are provided in
Table 4.
Table 3.
Research developments.
Table 3.
Research developments.
| Year | Development History |
|---|
| 2015 | Collision avoidance strategies covered in the article include sensing, tracking, and collision avoidance [44]. |
| 2016 | Focuses on surveying articles published from 2000 to 2015 that discuss the civil applications of UAVs [45]. |
| 2017 | Open-source flight controllers that are specifically designed for research purposes [46]. |
| 2018 | Cellular communication for UAVs. The research aims to bridge the existing gap between the current state of 3GPP regulations and the need for further investigation in this field [47]. |
| 2019 | The deployment of UAVs within cellular networks [48]. UAV applications, highlighting their benefits, potential challenges, major tradeoffs, and the mathematical tools involved [49]. The utilization of UAVs in the context of 5G/B5G wireless communication [50]. The integration of UAVs in millimeter-wave (mm-wave) communication [51]. |
| 2020 | The applications of UAVs and the associated challenges, regulations, and future research aspects related to future research in the field of UAV technology [52]. The exploration of software-defined network (SDN) and network function virtualization (NFV) technologies [53]. Study on UAVs from three distinct perspectives: swarms, sensors, and communications [54]. Explore various application scenarios of multi-UAV systems and operating multi-UAV systems and offers insights into addressing these challenges [55,56]. |
| 2021 | A comprehensive survey of green UAV communications [57]. The development of UAV prototypes and discusses experimental demonstrations that showcase their capabilities [58]. Deep learning tools for detecting vehicles using aerial images captured by UAVs [59]. |
| 2022 | The study centers around optimization algorithms, such as chicken swarm optimization clustering, bee optimization algorithm, and genetic algorithm [60]. Surveys different task assignment algorithms and examines their main ideas, benefits, drawbacks, and operational features [61]. |
| Current year | In the current year, this study aims to serve as a valuable resource for the research community. It provides researchers with guidelines and motivations to contribute to the advancement of UAV technology. Nonlinear control techniques are essential for UAVs operating in smart cities due to their ability to handle complex dynamics, enhance stability and robustness, optimize control performance, deal with nonlinear sensors and actuators, enable trajectory planning and obstacle avoidance, as well as facilitate fault detection and fault tolerant control. These techniques contribute to the safe, efficient, and reliable operation of UAVs in the urban environment. |
Table 4.
Overview of nonlinear control theory.
Table 4.
Overview of nonlinear control theory.
| Year | Work | Short Overview |
|---|
| 1880s–90s | Poincare | In celestial mechanics, nonlinear dynamics is studied as an n-body problem—limit cycle concept and bifurcation theory [62] |
| 1892 | Lyapunov | Analysis of dynamic systems’ stability [63] |
| 1910s | Duffing | Using second order nonlinear differential equations to model a dynamic chaotic system Equation [64] |
| 1920s | Van der Pol | Research on limit cycles and oscillator dynamics [65] |
| 1930s | Bode | Frequency response asymptotic representation [66] |
| 1930s | Krylov and Bogoliubov | Invariant measures theorem [67]—elaborate the theory of function method |
| 1932 | Nyquist | Regeneration
theory [68] |
| 1944 | Luré | Abolsute stability problem [69] |
| 1950s | Emelyanov | Theory of variable structure
system with sliding mode
control [70] |
| 1960 | Start | of modern era for nonlinear control |
| 1960s | Edward Norton Lorenz | Chaos theory [71]—butterfly effect [72] |
| 1960 | Kalman and Bertram | Review Lyapunov’s theory [73] |
| 1961 | Popov | Asymptotic stability [74]—hyperstability |
| 1962 | Yakubovich | Correlation of two theories results (Luré,
Popov’s) [75] |
| 1970 | Various scientists | Study energy mechanism of dynamic systems [76] |
| 1971 | Luenberger | Concept and construction of state observer [77] |
| 1972 | Willems Jan | Theory for dissipative systems [78] |
| 1978 | Richalet et al. | Model predictive heuristic
control [79] |
| 1980s | Zames | Formulation of H control [80] |
| 1989 | Ortega and Spong | Concept of passivity-based
control (PBC) [81] |
| 1990 | Start | of ‘activation process’ |
| 1990s | Sontag and Wang | Theory of
stability [82] |
| 1995 | Isidori | Geometric control theory [83] |
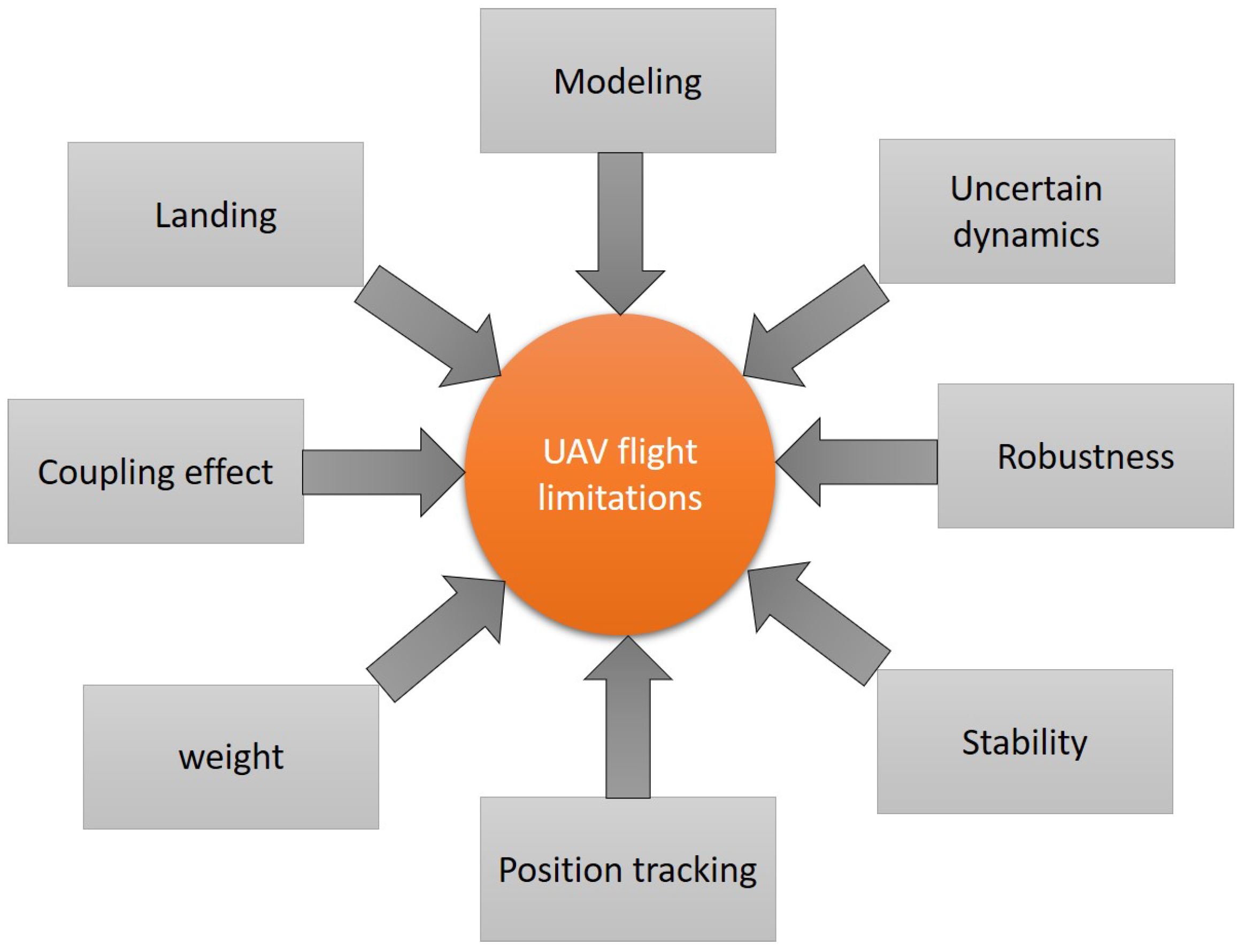
It is worth noting that ongoing advancements in UAV technology, such as improved battery technology, regulatory developments, sensor capabilities, and cybersecurity measures, aim to mitigate these limitations and enhance the overall effectiveness and reliability of UAV systems as represented in
Figure 6.
6. Importance of Hybrid Control Techniques
Hybrid control theory is a branch of modern control theory that deals with systems that exhibit both continuous and discrete behavior. These systems are called hybrid systems, and they are characterized by the interaction between continuous dynamics and discrete events, such as switching between different modes of operation or the occurrence of events that trigger changes in system behavior [
116]. Some developments in hybrid control are also provided in
Table 6.
Table 6.
Hybrid control.
| Year | Contributor | History |
|---|
| 1980s | Edward A. Lee and Alberto L. Sangiovanni-Vincentelli | They introduced the concept of hybrid systems and proposed a framework for analyzing their behavior [103,117,118]. |
| 1990s | Rajeev Alur, Thomas A. Henzinger, and Orna Kupferman | There have been numerous advances in hybrid control theory, with many researchers contributing to the field. One of the significant milestones in hybrid control theory was the development of the hybrid automaton model, which is a formalism for representing and analyzing hybrid systems[116,119]. |
| 1995 | Henzinger, T.A. and Kopke, P.W. | Other important contributions to hybrid control theory include the development of control synthesis methods, which are used to design control strategies for hybrid systems, and the study of stability and performance properties of hybrid systems [120]. |
| 2008 | Cassandras, C.G. and Lafortune, S. | Another significant contribution to hybrid control theory is the development of reachability analysis methods, which are used to determine the set of states that a hybrid system can reach from a given initial state. These methods have been shown to be effective for analyzing the behavior of hybrid systems and designing control strategies for them [121,122]. |
The control system of a UAV is a crucial and complex component that enables the UAV to achieve stable flight, precise maneuvering, and controlled behavior. The control system involves a combination of hardware and software elements that work together to ensure safe and effective operation. Hybrid control is important for this system because it provides a more robust and flexible control approach. In a hybrid control system, multiple control techniques are combined to provide better performance and stability. This is particularly useful in UAVs, where the system must operate in a wide range of environments and conditions. By combining different control techniques, the system can adapt to changing conditions and maintain stability [
123]. In the case of the UAV, the hybrid control approach combines a linear controller with a nonlinear controller. The linear controller is used to stabilize the system in a small range of motion, while the nonlinear controller is used for larger motions. This approach allows for better control of the system in both stable and unstable flight conditions [
124]. Another advantage of hybrid control for the UAV is that it can handle disturbances and uncertainties in the system. UAVs are subject to various disturbances, such as wind gusts and turbulence, which can affect the stability of the system. Hybrid control can help the system recover from these disturbances more quickly and effectively.
The paper introduces a new control scheme for a quadrotor UAV to perform standoff tracking of a moving ground target. The control system is divided into outer and inner loops, handling position and attitude control, respectively. The outer loop uses a cylindrical coordinate system to describe target motion and employs a Lyapunov-based guidance law for stability. Acceleration signals are converted to Euler angles for the inner control system. An integral backstepping controller stabilizes UAV attitude, and a disturbance observer addresses non-uniform target motion and constant wind effects. Numerical simulations confirm the proposed approach’s feasibility and performance [
125].
The hybrid control strategy described in the study combines a linear control approach for attitude stabilization and a nonlinear control approach for position control. Attitude stabilization refers to the control of the UAV’s orientation or angular position, while position control refers to the control of the UAV’s position in space. The authors suggest using a linear control approach for attitude stabilization, which typically involves using mathematical models and techniques to stabilize the UAV’s orientation. Linear control approaches are often effective for small deviations from the desired attitude [
104]. The results showed that the hybrid controller achieved better performance compared to the individual controllers. Another example is the paper [
105,
106,
126], in which the authors proposed a hybrid controller that combines a linear control approach for attitude stabilization and a nonlinear control approach for position control. The experimental results showed that the hybrid controller achieved better performance in terms of tracking accuracy and disturbance rejection compared to the individual controllers. The paper introduces a hybrid control system for a quadcopter drone’s trajectory tracking. Combining traditional PD control with fuzzy logic, the hybrid approach enhances robustness to uncertainties. Both controllers work in parallel to improve performance and robustness. Computer simulations and real-flight tests demonstrate their effectiveness against parameter variations, nonlinear aerodynamics, and disturbances like wind gusts. The hybrid system’s stability is analyzed using Lyapunov’s method [
108]. This study addresses robust control design for uncertain conditions, focusing on precise trajectory tracking for a small quadcopter UAV. It presents a hybrid feedback and feedforward autopilot system to counter disturbances in vertical, lateral, and longitudinal loops, as well as external factors like wind gusts. By combining nonlinear model predictive control and a fuzzy feedforward compensator, the hybrid system enhances performance beyond traditional PD control. Comparative studies showcase its effectiveness, and stability analysis ensures reliable operation [
108].
Many studies have focused on asymptotic and exponential stability, where errors converge as time approaches infinity. However, this approach may not always be ideal as quick response and convergence of error states within a few seconds are desired. Consequently, only a limited number of studies in the literature have addressed finite-time convergence in flight control systems. After the comprehensive literature regarding the deployment of UAVs in smart cities, the merits and demerits of nonlinear hybrid control strategies are elaborated in
Table 7. Hybrid control theory plays a significant role in enhancing the functionality and efficiency of UAVs within the framework of smart cities.
Contribution of Hybrid Control Strategies
Technical and Research Aspects of Hybrid Control Strategies
Hybrid control strategies offer a versatile and robust solution for UAVs operating in smart cities. By combining the strengths of different control approaches, these strategies enable UAVs to navigate through complex urban landscapes, perform diverse tasks, and contribute to the development of smart city infrastructure and services. Careful consideration of mode transitions, control mode selection, sensor fusion, and real-time implementation is essential for successfully applying hybrid control methods to UAVs in smart city contexts [
127].
Table 7.
Merits and Demerits of Nonlinear Hybrid Control Strategies.
Table 7.
Merits and Demerits of Nonlinear Hybrid Control Strategies.
| Strategy | Merits | Demerits |
|---|
| Hybrid Control (adaptive control, intelligent control) | Adaption and estimation of varying system parameters No need for precise model Improved performance Provides adaption Increases quality factor when integrated with other control techniques Flexible control strategy Coverage of wide-ranging operating conditions Human-like decisionsunlike Booleans Can reject unknown disturbances and provides adaption for uncertainmodel parameters Learning ability Adaption and estimation of varying parameters Enhanced robustness Improved performance Faster convergence Improved disturbance rejection Controller can be trained to provide tolerance against cyber threats, injected faulty data, wireless communication attacks, and sensorspoofing issues Increases quality factor when integrated with othercontrol techniques
| Provides limited artificial intelligence at sometimes Requires previous experience with the system under consideration Requires greater computational effort due to stochasticlearning policies Learning process is clumsy Adaption and estimation of varying system parameters Sensitivity to noise Requires complex adaption laws Tuning challenges Offline learning may fail under unknown gusty environment
|
8. Conclusions
The paragraph discusses the burgeoning research interest in UAVs, marked by an increase in patents and scientific articles, reflecting rapid growth in research and development. This surge stems from the demand for enhanced UAV mobility, autonomy, and extended range capabilities. Various practical applications are explored, spanning agriculture, disaster monitoring, healthcare, and more. The comprehensive review examines ongoing UAV developments from academic and industrial angles, covering types, characteristics, and technologies including nonlinearity and hybridity. It also underscores the growing interest among researchers, governments, and defense in this technology’s potential. This paragraph outlines UAV attributes, potential applications, challenges, and security issues. It concludes by emphasizing control theory’s vital role in UAV development, enabling safe and effective deployment for transformative impact in smart cities.


 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





