
Intelligent Simulation Technology Based on RCS Imaging

Abstract
:1. Introduction
2. Target Drone Simulation Principle
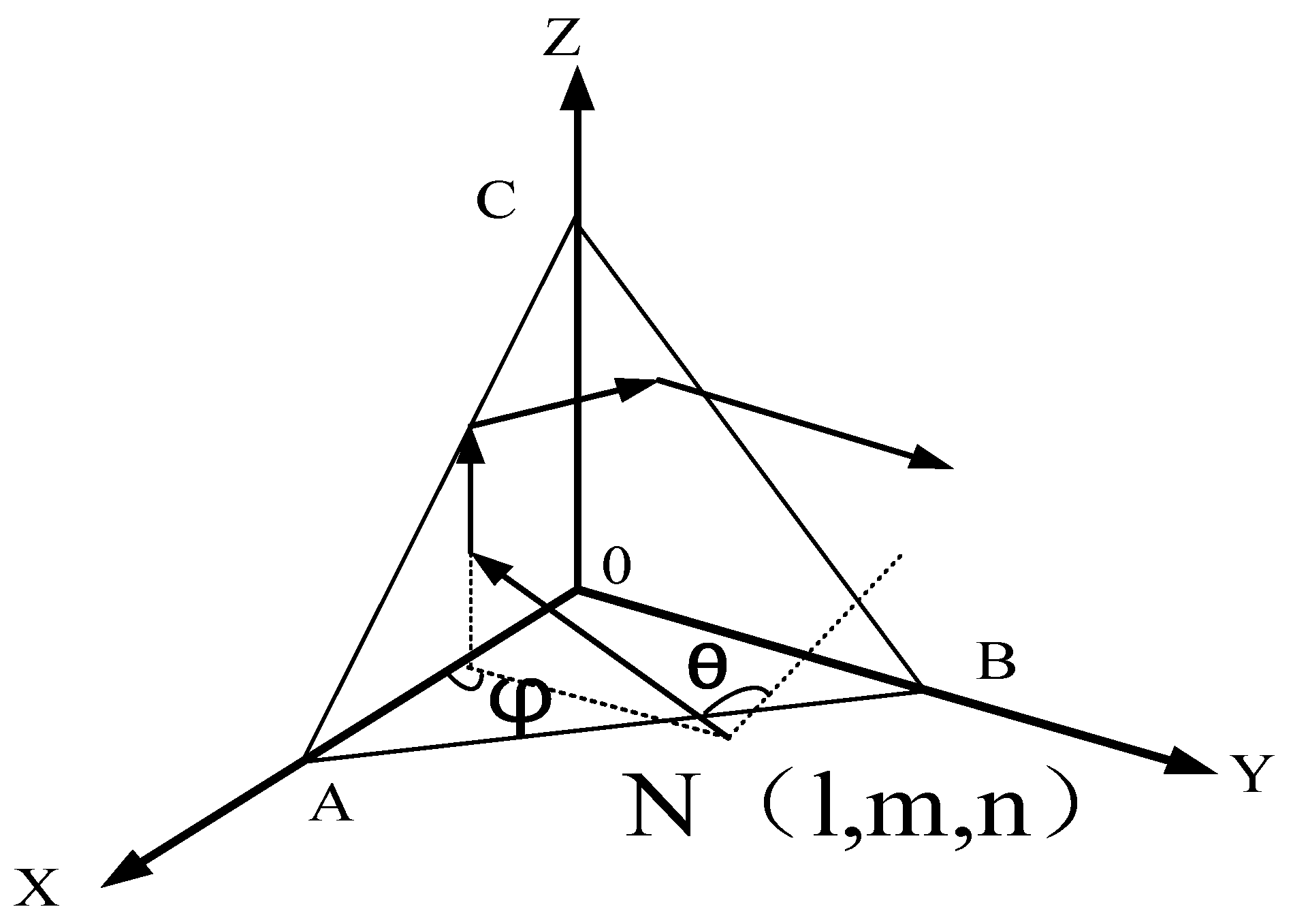
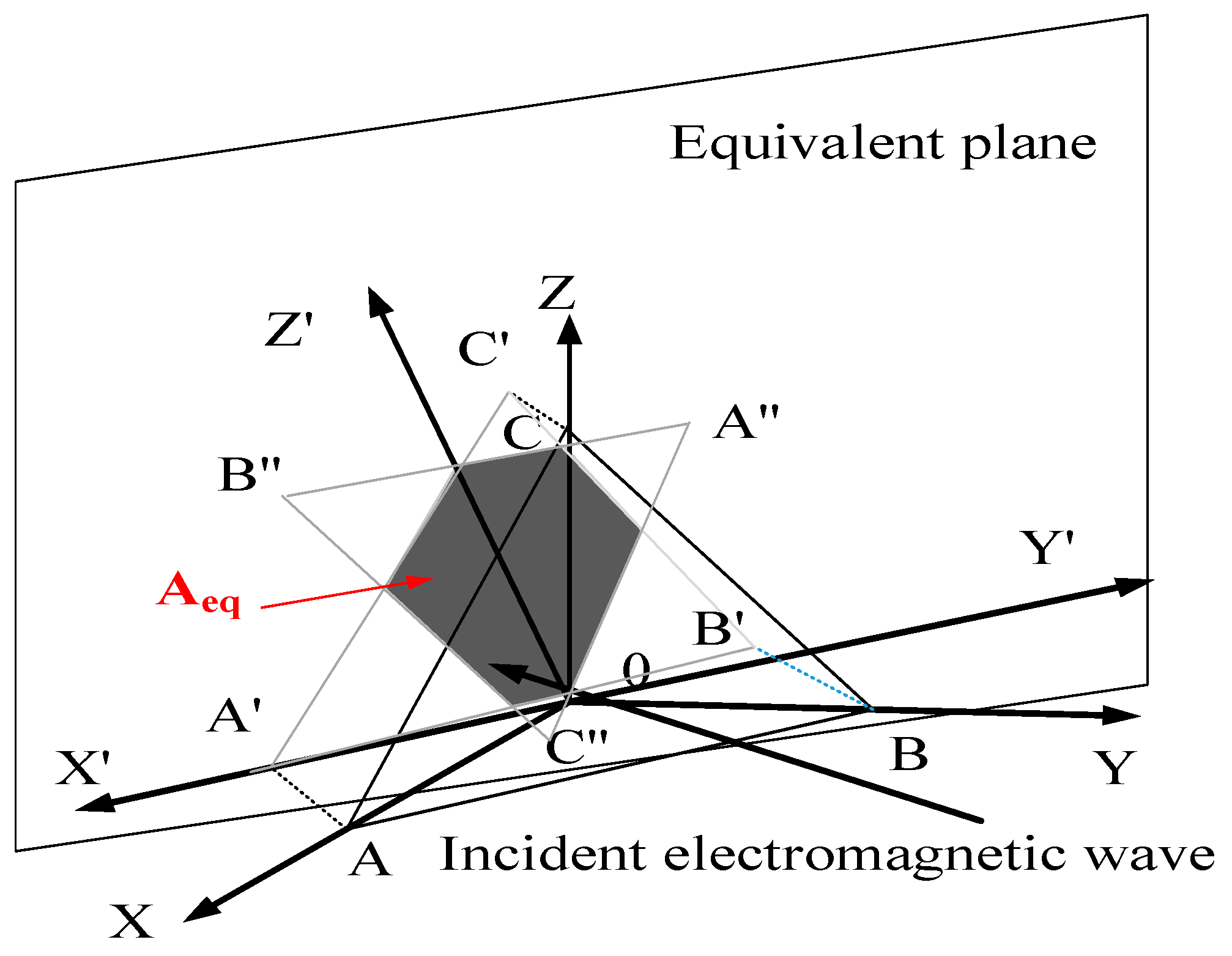
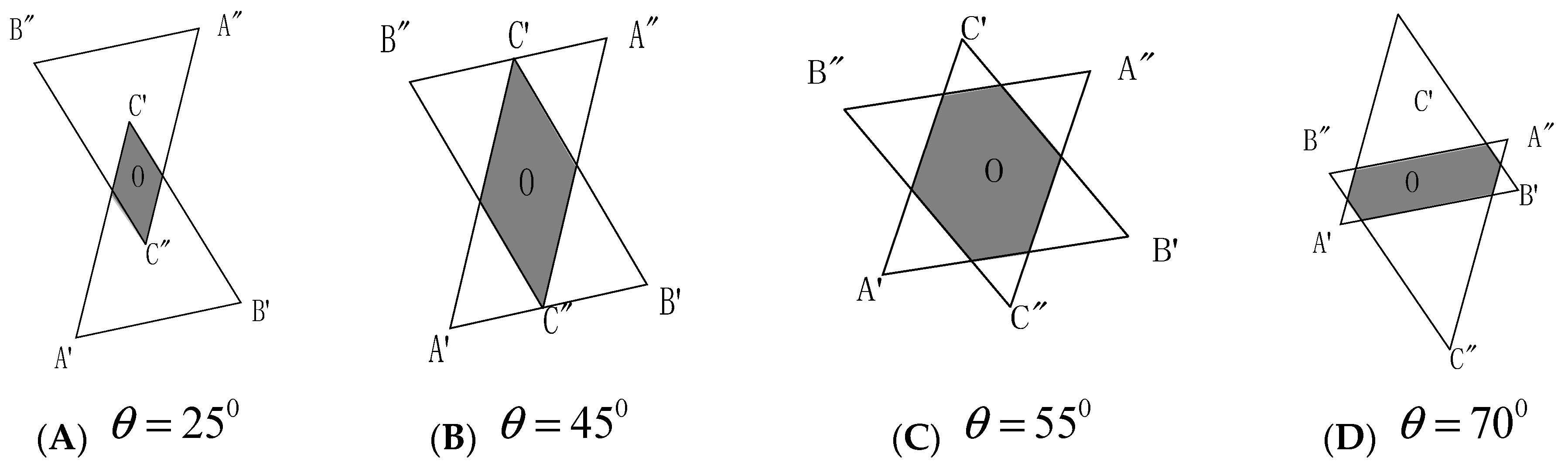
2.1. Variable Principle of Corner Reflector
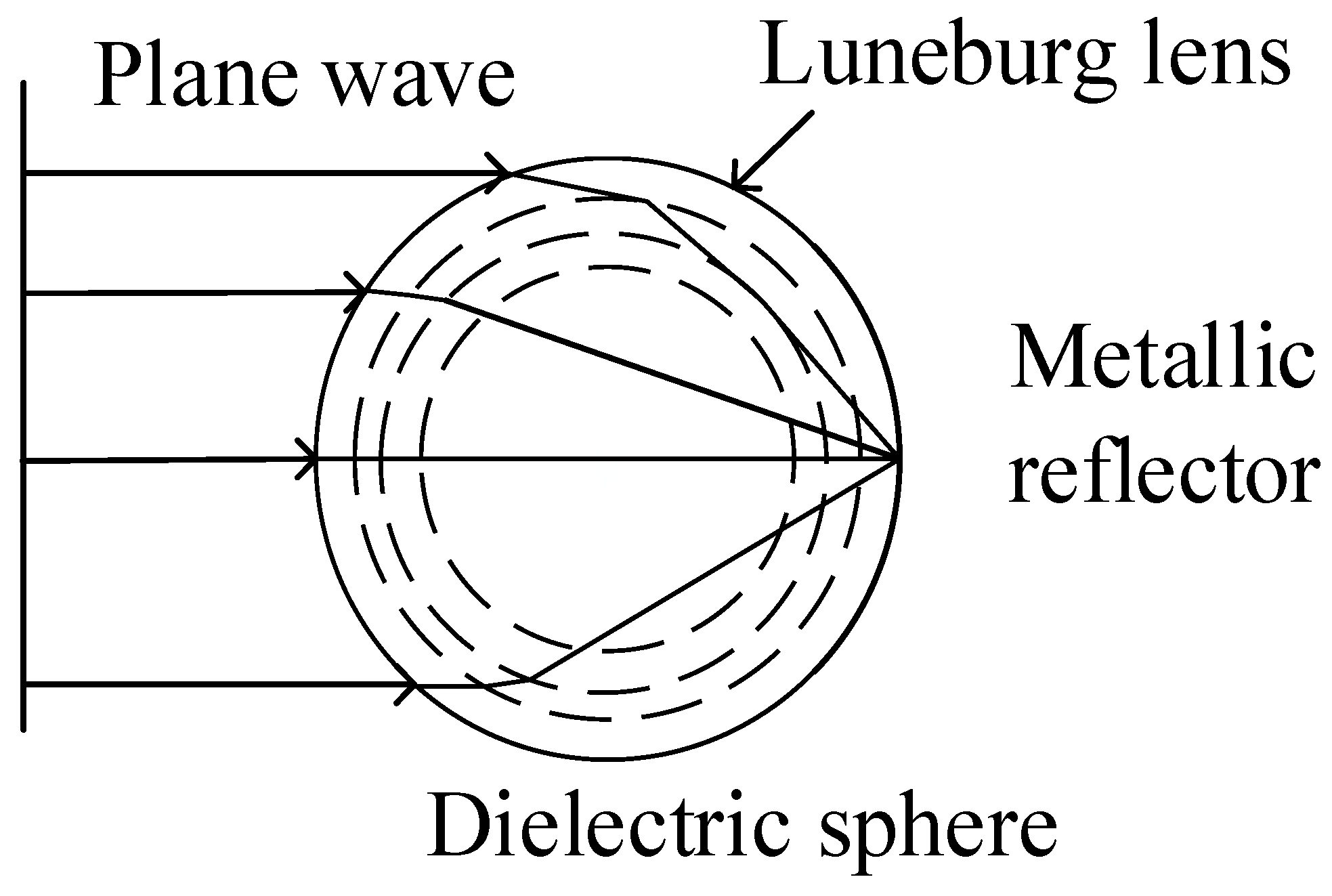
2.2. Luneberg Lens Reflector
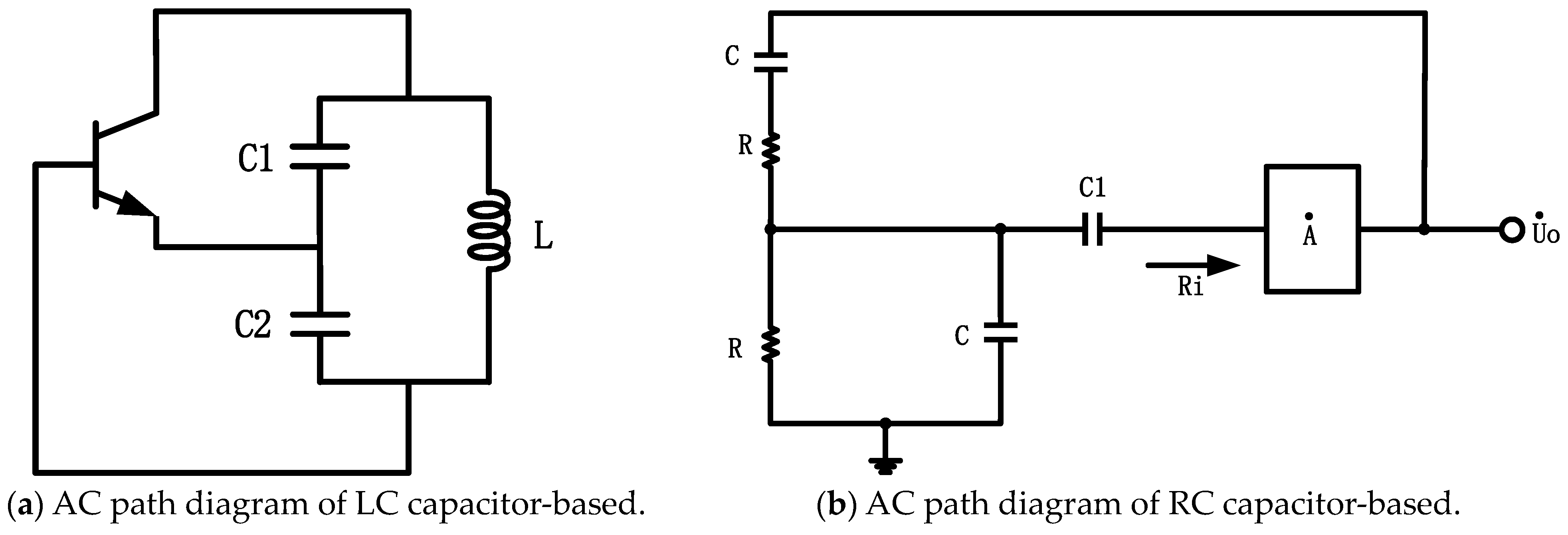
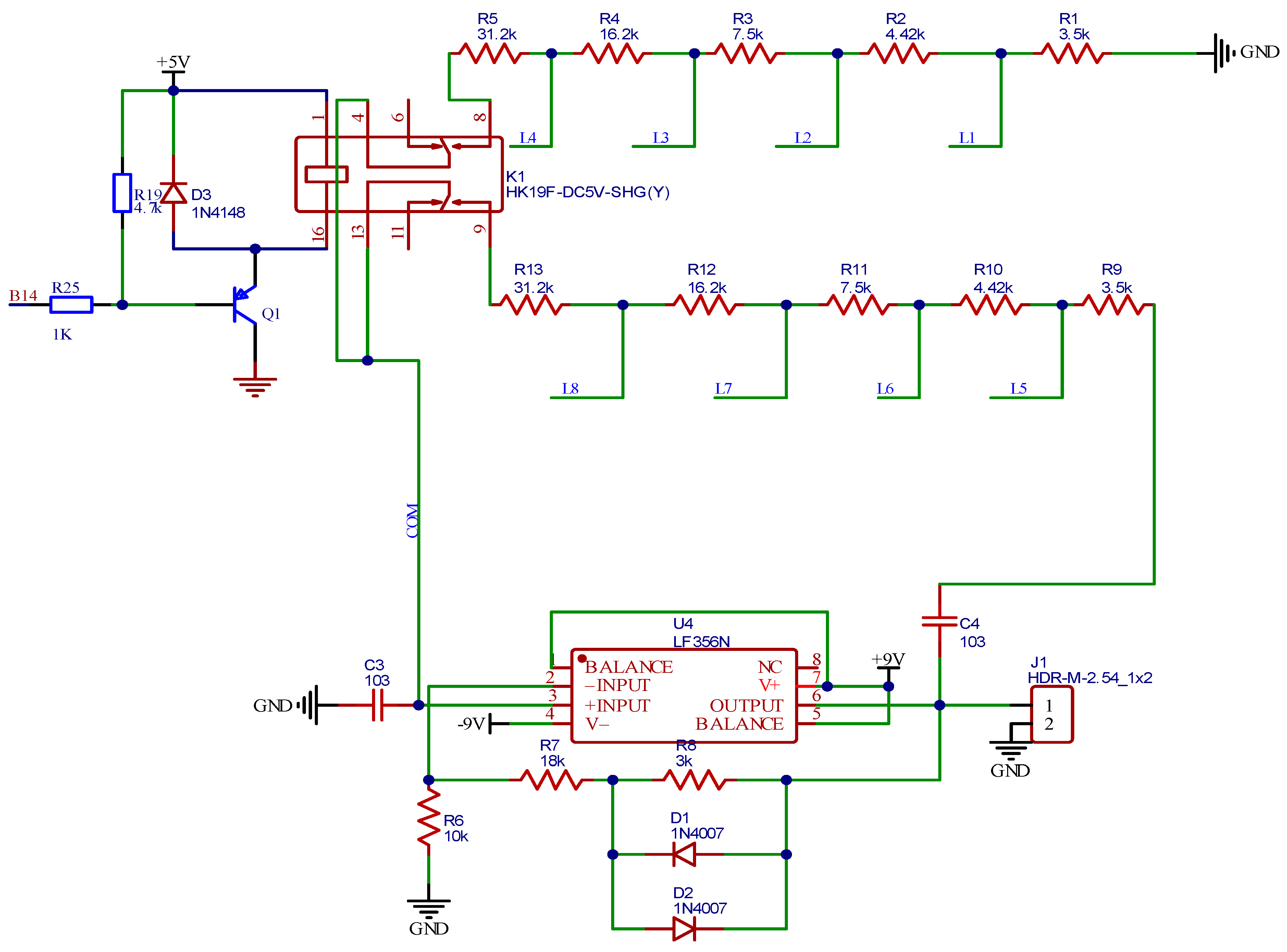
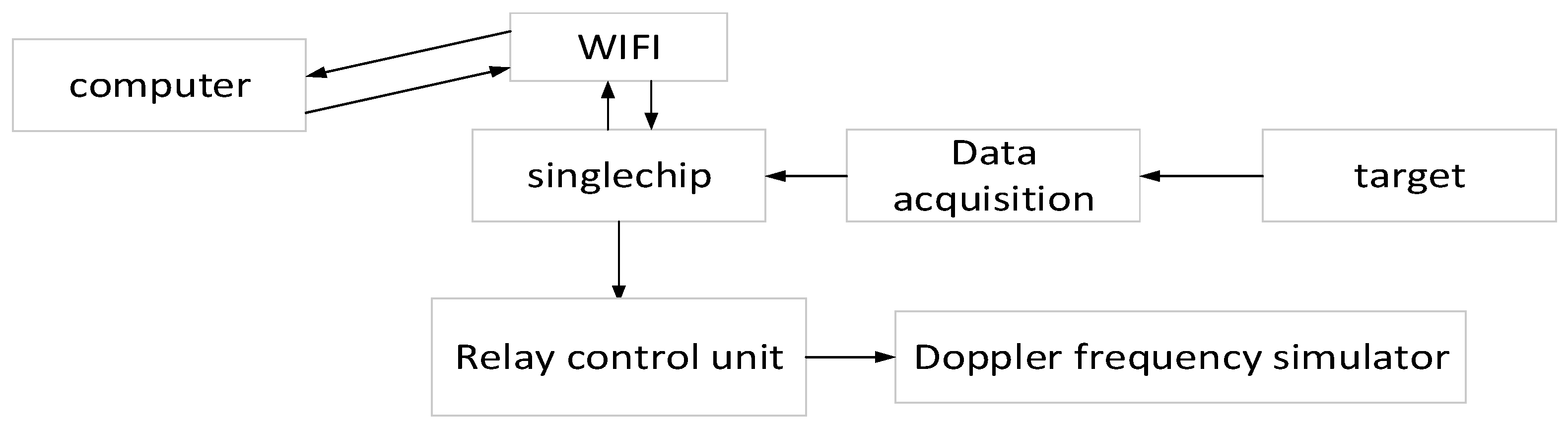
2.3. Doppler Signal Generation
2.4. Fidelity Evaluation Model
3. Target Simulation Modeling and Analysis
4. Analysis of Experimental Results
5. Conclusions
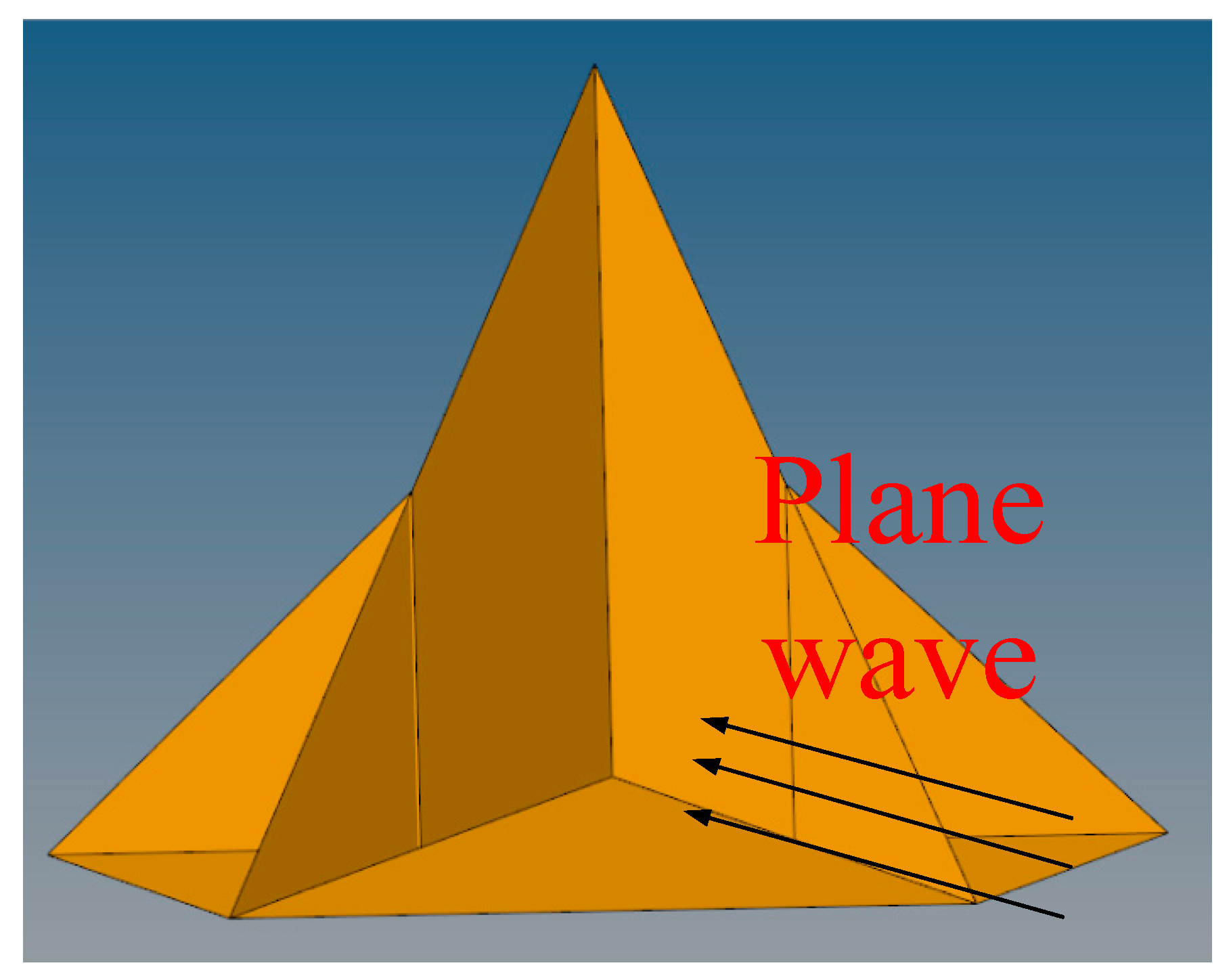
- The PO-AP method was used to analyze the RCS of the variable corner reflector, which made up for the shortcomings of the traditional PO method that could not calculate a complex model. A simulation target of an aircraft was designed;
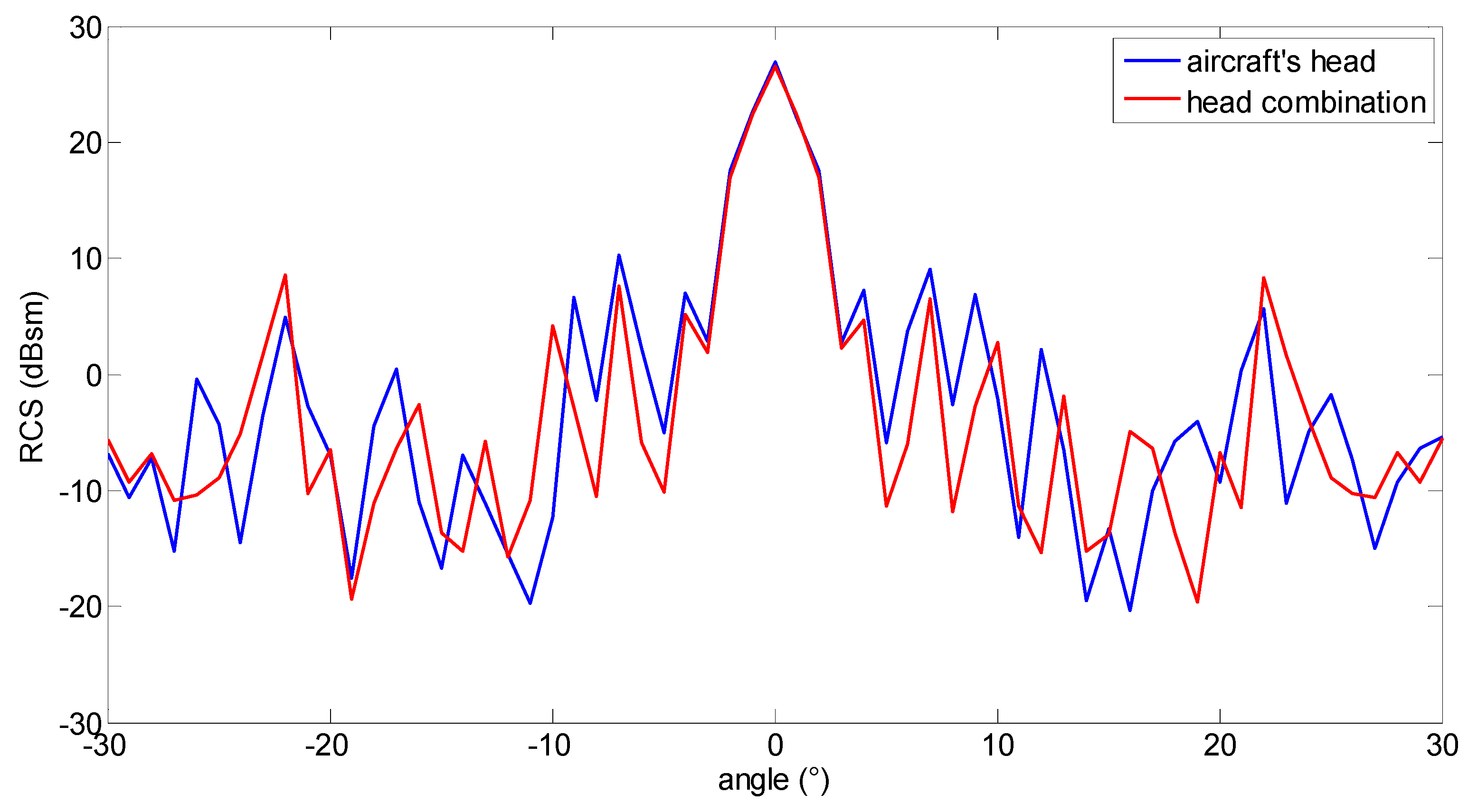
- The distribution characteristics of sharp angle RCS, stationary space region distribution characteristics and fluctuations caused by multiple scatterers of an aircraft were simulated by combining the corner reflector, Luneberg lens reflector and metal sphere. The RCS error of the nose was 1.39 dBsm, while the error of other parts was less than 3 dBsm, which satisfied the design index;
- A fidelity evaluation model for complex targets was proposed, and the designed simulation target drone scored up to 93.1 points, indicating a highly realistic level. This provided an objective and reliable fidelity evaluation rule for complex targets and provided a relevant theoretical basis;
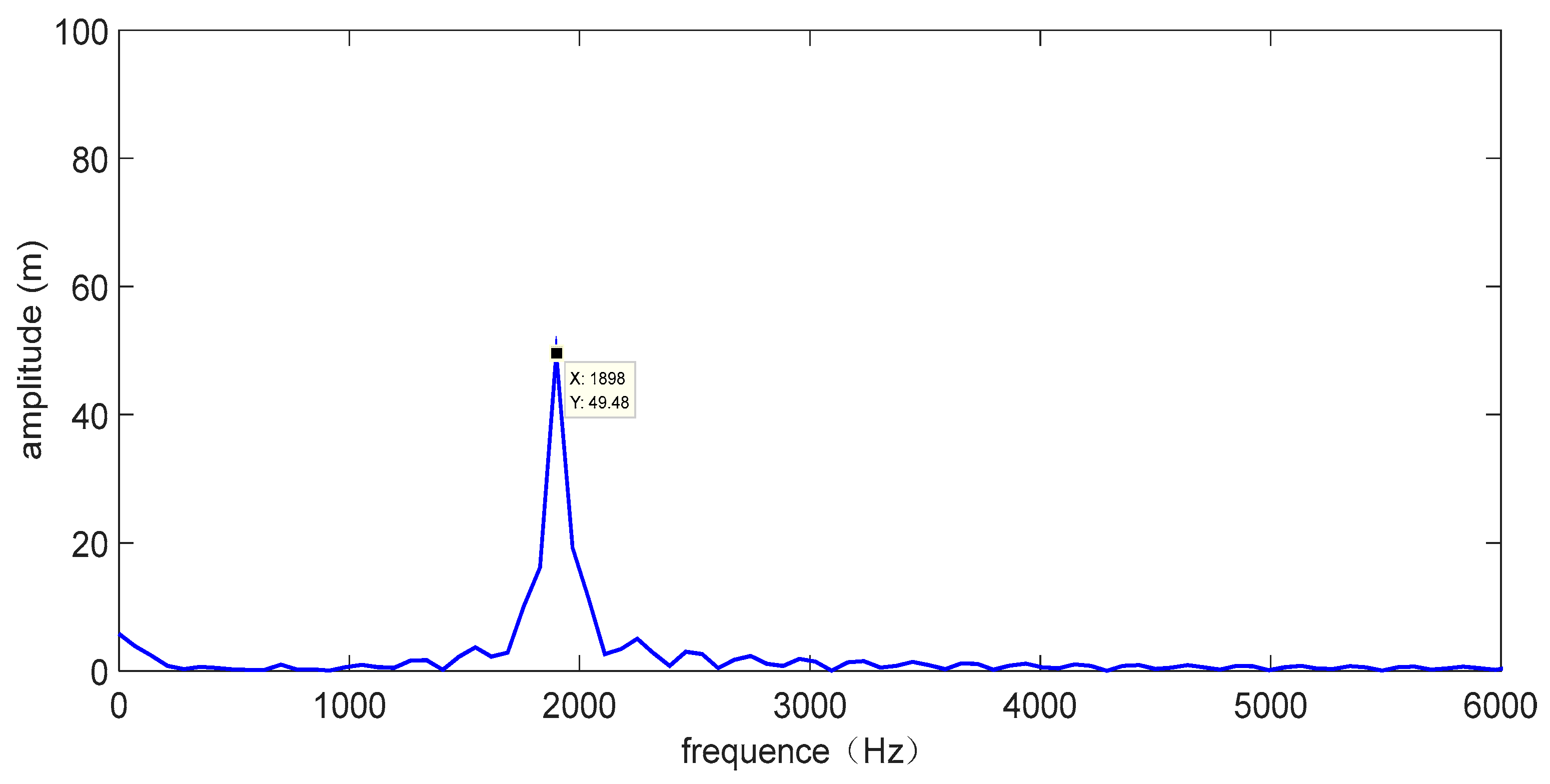
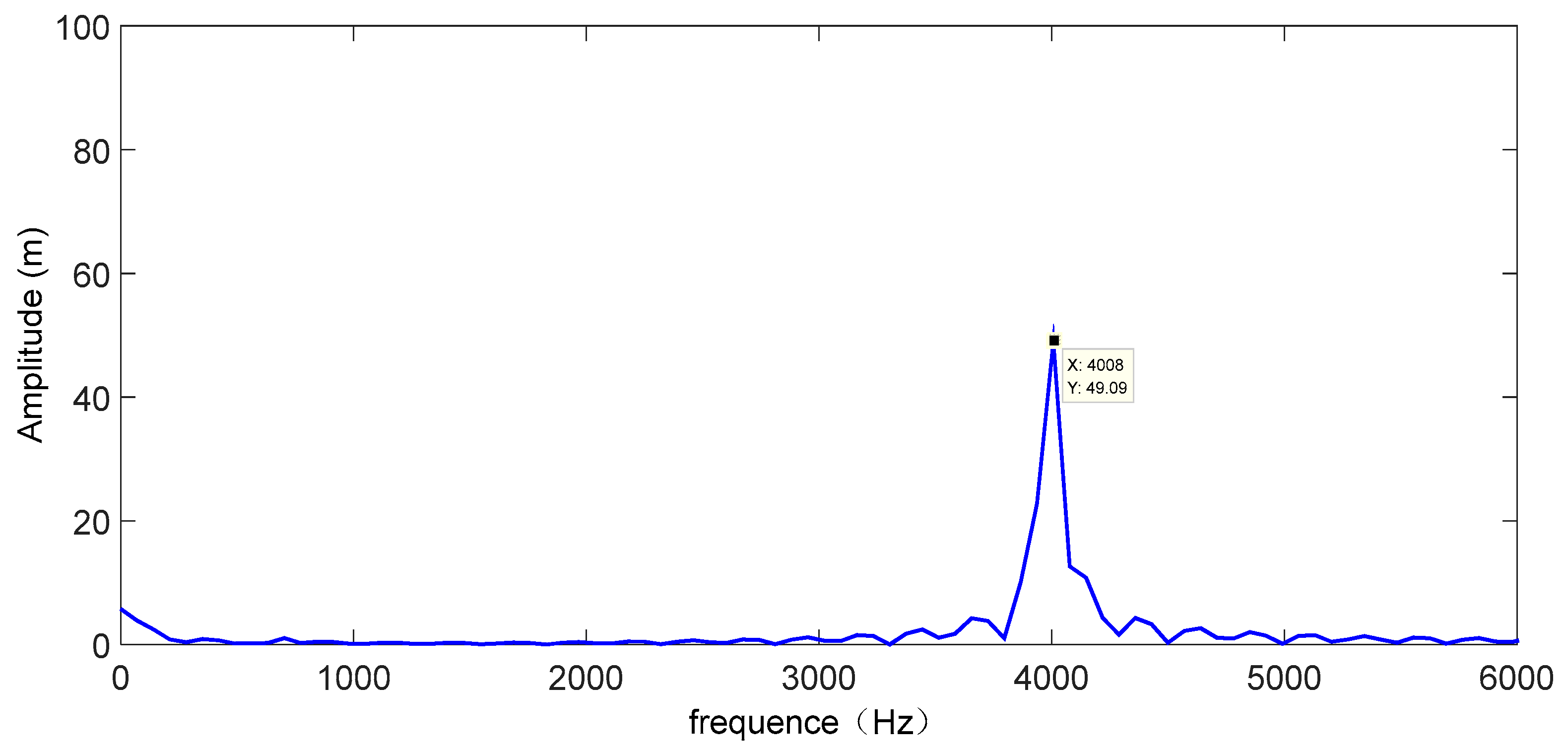
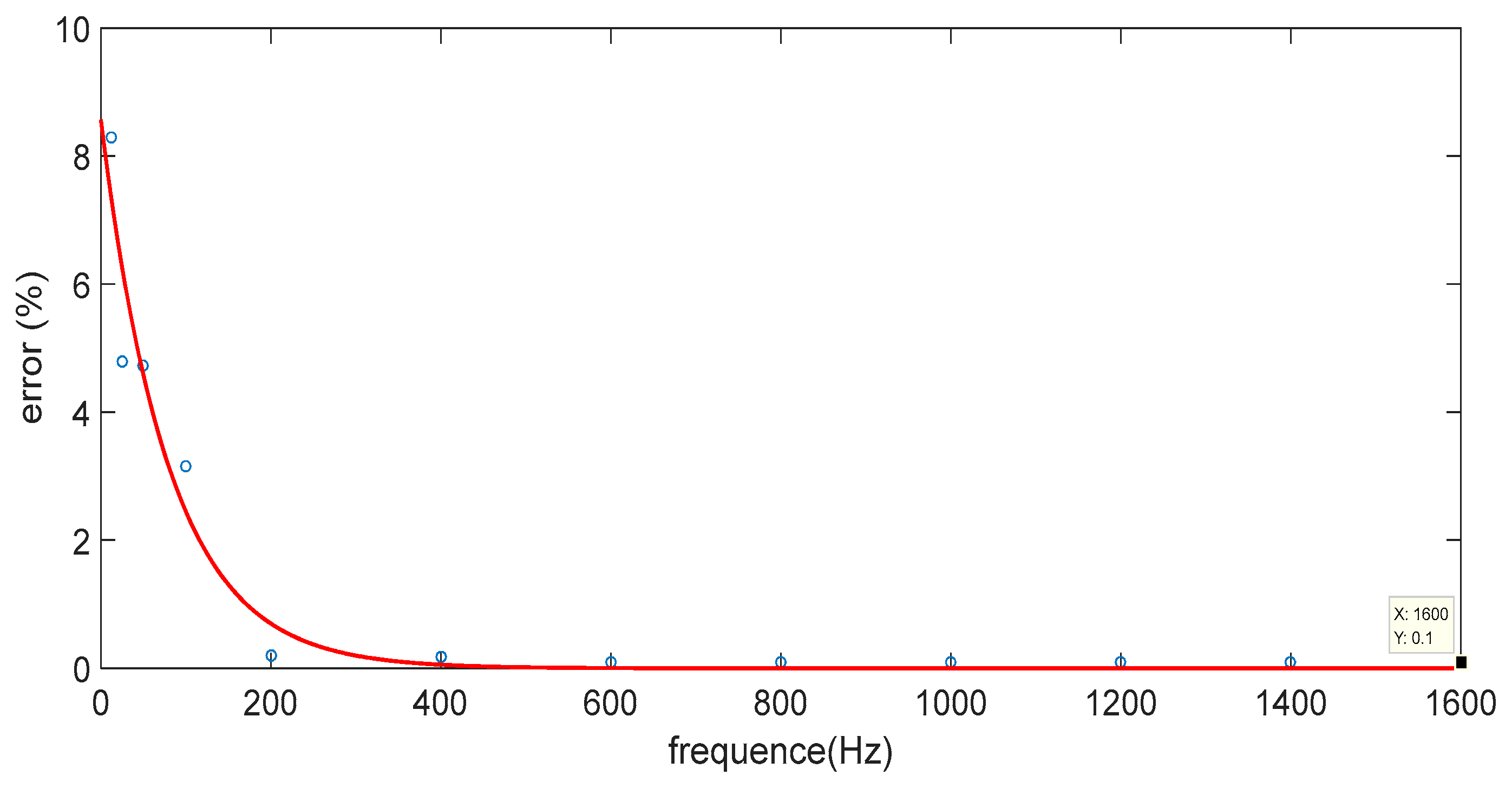
- The Doppler frequency simulator designed in this paper can simulate the motion characteristics of an aircraft, with errors of 8.3% and 4.8%, respectively, which can meet the test requirements.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tang, Y.; Qian, P.; Zhang, B. Development status and prospect of radar target echo simulation technology. Aerosp. Electron. Countermeas. 2019, 36, 28–34. [Google Scholar]
- Guo, B.; Kong, X.L.; Sun, H.X.; Zhang, Y.; Li, Y.B. Research on Simulation method of helicopter radar Characteristics. Aeronaut. Sci. Technol. 2019, 30, 57–61. [Google Scholar]
- Li, Y.W. Simulation and simulation analysis of ship target radar echoes. Ship Sci. Technol. 2018, 40, 79–81. [Google Scholar]
- Cai, W. Design and Implementation of Target Simulation System for Wideband Radar. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2015. [Google Scholar]
- Yu, X.C.; Li, J.W.; Fan, W.; Zhang, Z.; Zhao, Z.; Zhang, L.; Luo, C.; Li, X. Multi-objective optimization on flow characteristics of pressure swirl nozzle: A LES-VOF simulation. Int. Commun. Heat Mass Transf. 2022, 133, 105926. [Google Scholar]
- Numerical, M. Investigators from University of Adelaide Target Numerical Modeling (Complex motion characteristics of three-layered Timoshenko microarches characteristics of three-layered Timoshenko microarches). Nanotechnol. Wkly. 2017, 487–490. [Google Scholar]
- Zhou, Y.; Lin, M.Q.; Gao, Y.L. 3D Track Simulation Method based on Target Motion Characteristics. J. Circuits Syst. 2011, 16, 95–99. [Google Scholar]
- Li, Y.P.; Xie, W.X.; Pei, J.H.; Zhao, C.; Li, P.F. Infrared dim dim target detection based on wavelet transform and target motion characteristics. Infrared 2006, 9, 1–5. [Google Scholar]
- Yi, W.; Zhou, T.; Xie, M.; Yue, A.; Rick, S.B. Suboptimal Low Complexity Joint Multi-Target Detection and Localization for Non-Coherent MIMO Radar With Widely Separated Antenna. IEEE Trans. Signal Process. 2017, 6, 23–28. [Google Scholar] [CrossRef]
- Mohammad, R.J. A Robust TSWLS Localization of Moving Target in Widely Separated MIMO Radars. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 897–906. [Google Scholar]
- Maslovskiy, A.; Kolchigin, N. Decomposition method for complex target RCS measuring. In Proceedings of the 2017 IEEE First Ukraine Conference on Electrical and Computer Engineering (UKRCON), Kyiv, Ukraine, 29 May–2 June 2017; Volume 2, pp. 156–159. [Google Scholar]
- Ding, W.; Ou, Y.; Shi, G.Z. Research on the Development of Air Targets in the US Navy. Ship Sci. Technol. 2018, 40, 170–173. [Google Scholar] [CrossRef]
- Dennis, C.; Patrick, B. Fifth-gen-eration target drone project initial development. In Proceedings of the 11AIAA Aviation Technology, Integration, and Operations Conference, Virginia, VA, USA, 20–22 September 2011; Volume 3, pp. 20–28. [Google Scholar]
- Zhang, H.X.; Wu, D.; Jie, H.; Fang, X.; Cao, Q. Integration design of electromagnetic and aerodynamic characteristics of the target Longbo ball integrated reflector. Fire Command. Control 2022, 47, 144–149. [Google Scholar]
- Yan, F.F.; Yuan, G.Y. Key Technologies and Development Trends of Target Technology. In Proceedings of the 9th Yangtze River Delta Science and Technology Forum-Aerospace Science and Technology Innovation and Yangtze River Delta Economic Transformation and Development Sub Forum, Nanjing, China, 9 November 2012; Volume 1, pp. 373–382. [Google Scholar]
- Wang, D.B.; Ren, J.G.; Jiang, W.Y.; Wang, Y. Development of Unmanned target drone and their autonomous control technology. Sci. Technol. Bull. 2017, 35, 49–57. [Google Scholar]
- Kimberly, H.; Craig, M.; Cook, J.; Feld, A. China’s Military Unmanned Aerial Vehicle Industry; U.S. China Economic and Security Review Com-Mission: Washington, DC, USA, 2013.
- Fonseca Nelson, J.G.; Liao, Q.B. Compact Parallel-Plate Waveguide Half-Luneburg Geodesic Lens in the Ka-Band; IET Microwaves, Antennas & Propagation: Guildford, UK, 2020; Volume 15. [Google Scholar]
- Li, Q.; Vernon, R.J. Theoretical and Experimental investigation of gaussian beam transmission and reflection by a dielectricslab at 110 GHz. IEEE Trans. Antennas Propag. 2006, 54, 3449–3457. [Google Scholar]
- Gui, W.R. Application of Lomborg lens technology in emergency satellite communication system. Netw. Secur. Technol. Appl. 2023, 1, 96–98. [Google Scholar]
- Liu, J. Research on Multi-Beam Lundberg Lens Antenna. Master’s Thesis, University of Electronic Science and Technology of China, Chengdu, China, 2010. [Google Scholar]
- Zhang, B.; Ge, Q.S. Discussion on radar stealth and Simulation Method of Bridge. Def. Transp. Eng. Technol. 2005, 4, 21–23. [Google Scholar]
- Liu, Z.; Fu, X.Z. Research on RCS Prediction of gun-fired Random Angle Reflector Array. J. Syst. Simul. 2009, 21, 2077–2080. [Google Scholar]
- Zhang, W.B.; Li, Y.B. Anti-reconnaissance Camouflage Protection of Air Defense Weapon Positions. Sichuan Ordnance Eng. J. 2011, 32, 134–136. [Google Scholar]
- Yang, W.; Kee, C.Y. Novel extension of sbr pomethod for solving electrically large and complex electromagnetic scattering problem should be a space in halfspace. IEEE Trans. Geosci. Remote Sens. 2017, 18, 1–10. [Google Scholar]
- Weng, Y.K.; Li, S. Efficient solution to theRCS of trihedral corner reflector. Int. J. Appl. Electromagn. Mech. 2015, 47, 533–539. [Google Scholar]
- Algafsh, A.; Inggs, M. The effect of perforating the corner reflector on maximum radar cross section. Proc. Microw. Symp. 2017, 1, 1–4. [Google Scholar]
- Zhang, S.M. Analysis of Stable Static Operating Point Circuit. J. Suihua Univ. 2005, 6, 163–164. [Google Scholar]
- Sheng, L.H.; Zhong, L. Research on the RCS of complex target using FEKO. In Proceedings of the 2011 Second International Conference on Mechanic Automation and Control Engineering, Inner Mongolia, China, 15–17 July 2011; Volume 1, pp. 4366–4436. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fidelity Score | Parameter Indicator |
|---|---|
| 90–100 | Most realistic |
| 80–90 | Very realistic |
| 70–80 | More realistic |
| 60–70 | General fidelity |
| Less than 60 | Unreal |
| Parameter Name | Parameter Indicator |
|---|---|
| The highest frequency in the signal () | 3.6 KHz |
| Sampling frequency () | 10 MHz |
| Amplification power | 20 dB |
| Collection points | 361 |
| IF bandwidth | 50 kHz |
| Speed | 0 km/h | 12.5 km/h | 25 km/h | 50 km/h | 100 km/h | 200 km/h |
| Error | 0% | 8.30% | 4.80% | 4.72% | 3.16% | 0.20% |
| Model | Maximum Level Speed | Utility Ceiling/m | Endurance Time | Cost/RMB |
|---|---|---|---|---|
| The aircraft simulator in this paper | 1.3 Ma | 15,000 | 2 h | About 10,000 |
| JC-80 | 0.78 Ma | 7000 | 30 min | Hundreds of thousands |
| II-250 | 0.74 Ma | 11,000 | 60 min | Hundreds of thousands |
| S-400 | 1.17 Ma | 10,000 | 60 min | Hundreds of thousands |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hao, J.; Wang, X.; Yang, S.; Gao, H. Intelligent Simulation Technology Based on RCS Imaging. Appl. Sci. 2023, 13, 10119. https://doi.org/10.3390/app131810119
Hao J, Wang X, Yang S, Gao H. Intelligent Simulation Technology Based on RCS Imaging. Applied Sciences. 2023; 13(18):10119. https://doi.org/10.3390/app131810119
Chicago/Turabian StyleHao, Jiaxing, Xuetian Wang, Sen Yang, and Hongmin Gao. 2023. "Intelligent Simulation Technology Based on RCS Imaging" Applied Sciences 13, no. 18: 10119. https://doi.org/10.3390/app131810119
APA StyleHao, J., Wang, X., Yang, S., & Gao, H. (2023). Intelligent Simulation Technology Based on RCS Imaging. Applied Sciences, 13(18), 10119. https://doi.org/10.3390/app131810119