
Fault Identification Technology of 66 kV Transmission Lines Based on Fault Feature Matrix and IPSO-WNN


Abstract
:1. Introduction
2. Fault Analysis and Feature Extraction
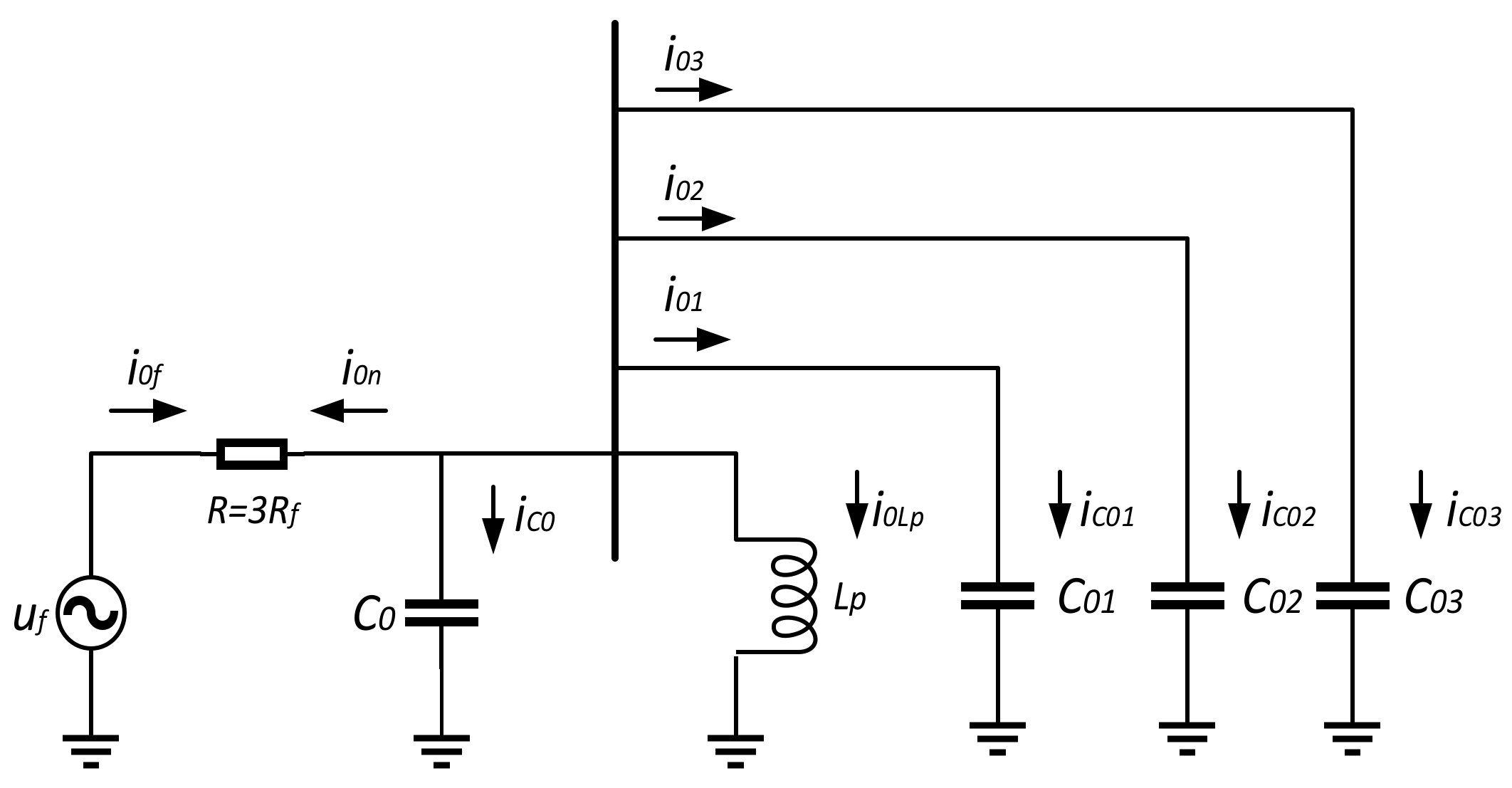
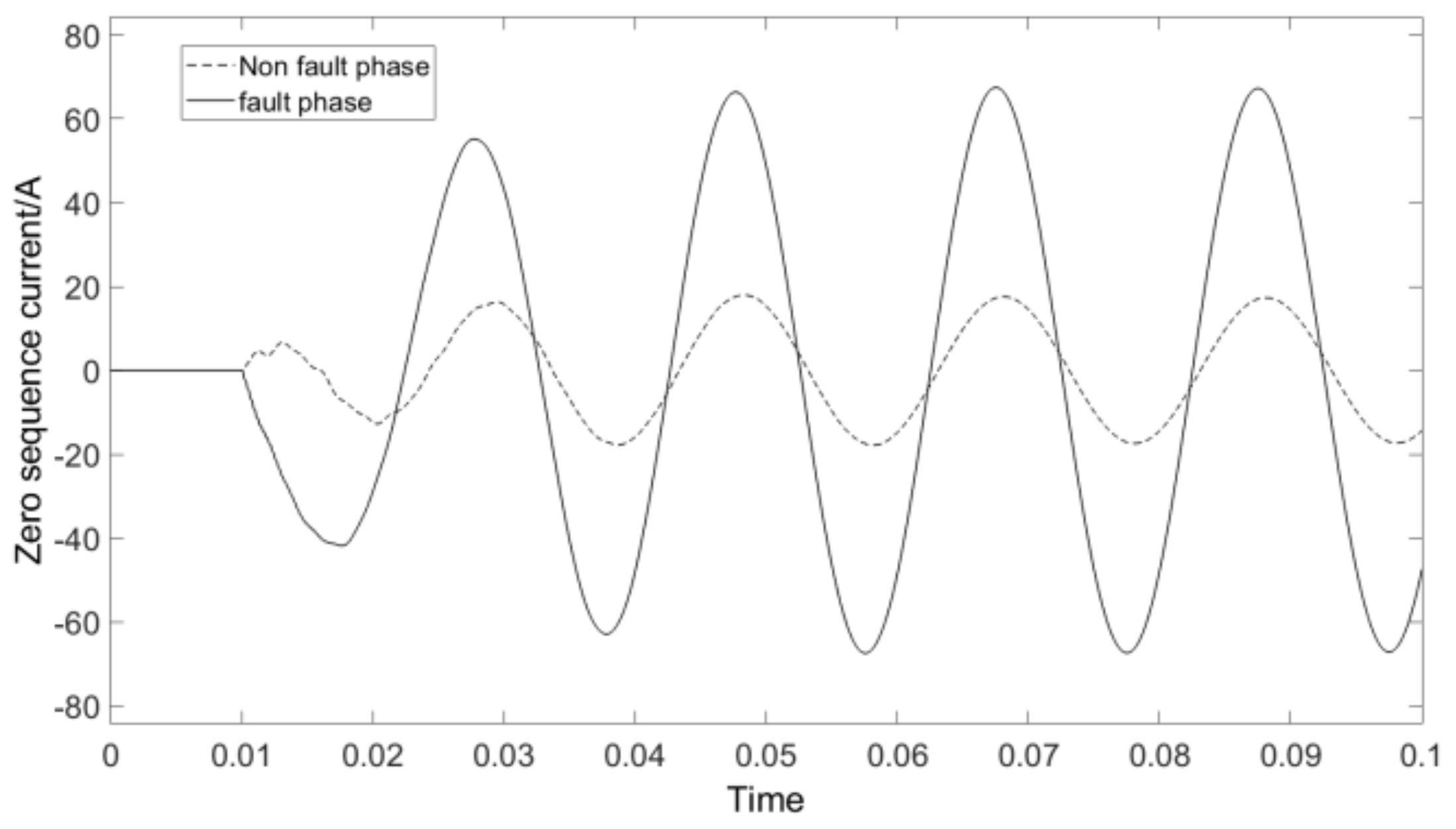
2.1. Single-Phase Ground Fault Simulation and Analysis
2.1.1. High Resistance Ground Fault
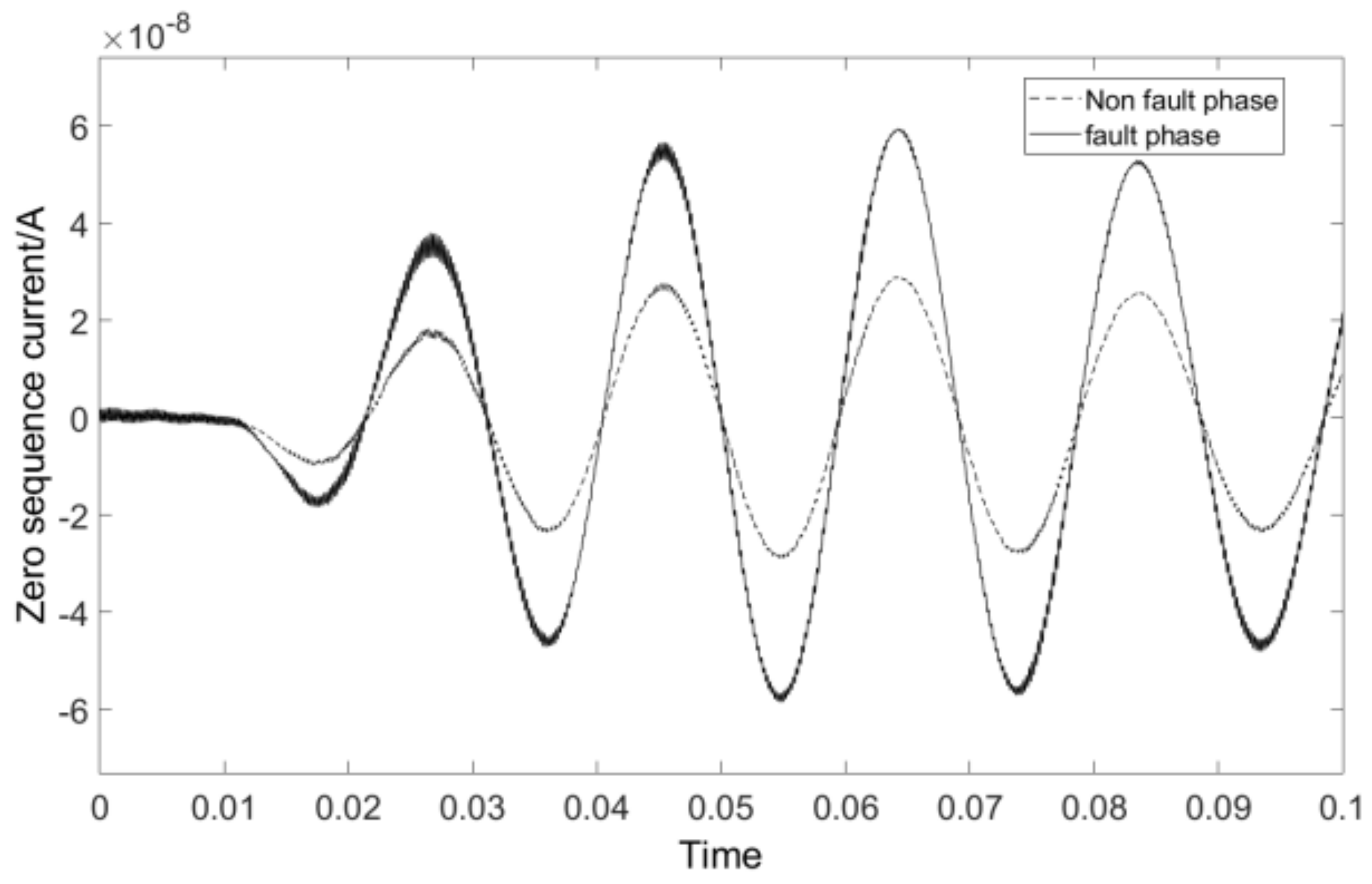
2.1.2. Arc Ground Fault
- (1.)
- Mayr arc model
- (2.)
- Simulation of Arc ground failure
2.2. Short Circuit Fault Analysis and Characteristic Diagnosis
3. Fault Feature Extraction
3.1. Selection of Basic Parameters
3.1.1. The Selection of Wavelet Basis Function
3.1.2. Decomposition Scale and Selection of Characteristic Quantities
3.2. Calculation of Fault Characteristic Matrix
4. Fault Identification Method Based on IPSO-WNN
4.1. WNN Hidden Layer Output Optimization
4.2. Fault Identification Method Based on IPSO-WNN
4.3. Fault Identification Process
5. Simulation Verification
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lukowicz, M.; Solak, K.; Wiecha, B. Optimized bandpass admittance criteria for earth fault protection of MV distribution networks. Int. J. Electr. Power Energy Syst. 2020, 119, 105855. [Google Scholar] [CrossRef]
- Abdollahzadeh, H. A new approach to eliminate impacts of high-resistance faults by compensation of traditional distance relays’ input signals. Electr. Power Syst. Res. 2021, 194, 107098. [Google Scholar] [CrossRef]
- Li, B.; Wang, W.; Wen, W.; Yao, B.; He, J.; Wang, X. Unbalanced currents of EHV multi-circuit lines and coordination of zero-sequence overcurrent relayings. Int. J. Electr. Power Energy Syst. 2021, 126, 106607. [Google Scholar] [CrossRef]
- Wang, X.; Liu, W.; Liang, Z.; Guo, L.; Du, H.; Gao, J.; Li, C. Faulty feeder detection based on the integrated inner product under high impedance fault for small resistance to ground systems. Int. J. Electr. Power Energy Syst. 2022, 140, 108078. [Google Scholar] [CrossRef]
- Esmail, E.M.; Elgamasy, M.M.; Kawady, T.A.; Taalab, A.M.I.; Elkalashy, N.I.; Elsadd, M.A. Detection and experimental investigation of open conductor and single-phase earth return faults in distribution systems. Int. J. Electr. Power Energy Syst. 2022, 140, 108089. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, X.; Li, J.; Xu, Y.; Wu, G. Small-current grounding fault location method based on transient main resonance frequency analysis. Glob. Energy Interconnect. 2020, 3, 324–334. [Google Scholar] [CrossRef]
- Gaur, V.K.; Bhalja, B.R.; Saber, A. New ground fault location method for three-terminal transmission line using unsynchronized current measurements. Int. J. Electr. Power Energy Syst. 2022, 135, 107513. [Google Scholar] [CrossRef]
- El-Naily, N.; Saad, S.M.; Elhaffar, A.; Zarour, E.; Alasali, F. Innovative Adaptive Protection Approach to Maximize the Security and Performance of Phase/Earth Overcurrent Relay for Microgrid Considering Earth Fault Scenarios. Electr. Power Syst. Res. 2022, 206, 107844. [Google Scholar] [CrossRef]
- Li, J.; Li, Y.; Wang, Y.; Song, J. Single-phase-to-ground fault protection based on zero-sequence current ratio coefficient for low-resistance grounding distribution network. Glob. Energy Interconnect. 2021, 4, 564–575. [Google Scholar] [CrossRef]
- Arranz, R.; Paredes, A.; Rodríguez, A.; Muñoz, F. Fault location in transmission system based on transient recovery voltage using Stockwell transform and artificial neural networks. Electr. Power Syst. Res. 2021, 201, 107569. [Google Scholar] [CrossRef]
- Mou, H.; Hu, Z.; Gao, M. New method of measuring the zero-sequence distributed parameters of non-full-line parallel four-circuit transmission lines. Int. J. Electr. Power Energy Syst. 2022, 139, 108040. [Google Scholar] [CrossRef]
- Lopes, G.N.; Menezes, T.S.; Santos, G.G.; Trondoli, L.H.P.C.; Vieira, J.C.M. High impedance fault detection based on harmonic energy variation via S-transform. Int. J. Electr. Power Energy Syst. 2022, 136, 107681. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Fault Type | Input Fault Characteristics | Desired Output |
|---|---|---|
| Three phase short circuit fault | > 100 and (i = A, B, C) > 100A is l, l = 2 | 1 |
| High resistance ground fault | > 100 and l = 3 | 2 |
| Arc earthed failure | and | 3 |
| Three phase short circuit fault | and | 4 |
| Number of Training Samples | Number of Test Samples | Fault Distance/km | Recognition Accuracy/% | Training Time/s |
|---|---|---|---|---|
| 150 | 50 | 5 | 98 | 134 |
| 20 | 96 | 148 | ||
| 40 | 96 | 167 | ||
| 60 | 94 | 181 |
| Number of Training Samples | Number of Test Samples | Fault Initial Phase Angle/° | Recognition Accuracy/% | Training Time/s |
|---|---|---|---|---|
| 150 | 50 | 0 | 96 | 171 |
| 25 | 96 | 159 | ||
| 45 | 98 | 146 | ||
| 60 | 96 | 157 | ||
| 90 | 100 | 143 |
| Number of Training Samples | Number of Test Samples | Algorithm Type | Recognition Accuracy/% | Training Time/s |
|---|---|---|---|---|
| 150 | 50 | WNN | 82 | 1149 |
| SVM | 84 | 921 | ||
| PSO-WNN | 94 | 547 | ||
| SSA-SVM | 92 | 344 | ||
| IPSO-WNN | 98 | 164 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Q.; Wang, M.; Yang, Y.; Wang, X.; Qi, E.; Li, C. Fault Identification Technology of 66 kV Transmission Lines Based on Fault Feature Matrix and IPSO-WNN. Appl. Sci. 2023, 13, 1220. https://doi.org/10.3390/app13021220
Zhang Q, Wang M, Yang Y, Wang X, Qi E, Li C. Fault Identification Technology of 66 kV Transmission Lines Based on Fault Feature Matrix and IPSO-WNN. Applied Sciences. 2023; 13(2):1220. https://doi.org/10.3390/app13021220
Chicago/Turabian StyleZhang, Qi, Minzhen Wang, Yongsheng Yang, Xinheng Wang, Entie Qi, and Cheng Li. 2023. "Fault Identification Technology of 66 kV Transmission Lines Based on Fault Feature Matrix and IPSO-WNN" Applied Sciences 13, no. 2: 1220. https://doi.org/10.3390/app13021220
APA StyleZhang, Q., Wang, M., Yang, Y., Wang, X., Qi, E., & Li, C. (2023). Fault Identification Technology of 66 kV Transmission Lines Based on Fault Feature Matrix and IPSO-WNN. Applied Sciences, 13(2), 1220. https://doi.org/10.3390/app13021220