
Considerations for Developing Robot-Assisted Crisis De-Escalation Practices


Abstract
:1. Introduction
2. Crisis De-Escalation
3. Basic Requirements for Social Robots and Working Model for De-Escalation
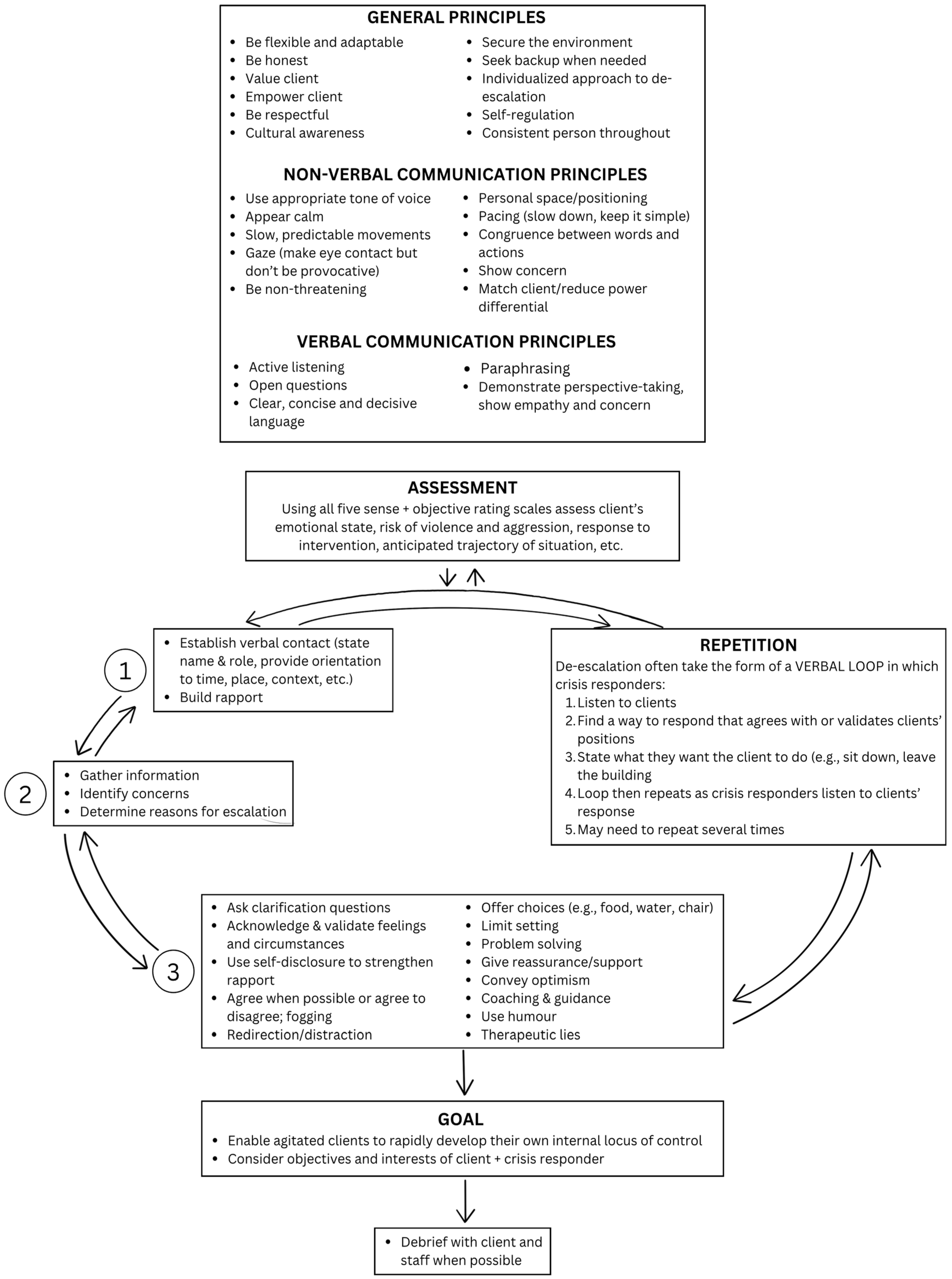
Working Model of De-Escalation
“De-escalation frequently takes the form of a verbal loop in which the clinician listens to the patient, finds a way to respond that agrees with or validates the patient’s position, and then states what he wants the patient to do (e.g., accept medication, sit down, etc.). The loop repeats as the clinician listens again to the patient’s response. The clinician may have to repeat his message a dozen or more times before it is heard by the patient.”[10] (p. 19)
4. Integrating the De-Escalation Process into Human–Robot Interactions
4.1. Assessment: Sensing the Environment and Knowing When to Intervene
4.2. Planning the Response: Making Decisions about What to Do Next
4.3. Actions to Support De-Escalation
4.3.1. Verbal Communication Principles
4.3.2. Non-Verbal Communication Principles
4.3.3. Specific Tasks
5. Training the Robot
6. Future Directions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rubenstein, M.; Cimino, B.; Nagpal, R.; Werfel, J. AERobot: An affordable one-robot-per-student system for early robotics education. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 6107–6113. [Google Scholar]
- Robinson, N.L.; Connolly, J.; Suddery, G.; Turner, M.; Kavanagh, D.J. A humanoid social robot to provide personalized feedback for health promotion in diet, physical activity, alcohol and cigarette use: A health clinic trial. In Proceedings of the 2021 30th IEEE International Conference on Robot & Human Interactive Communication (RO-MAN), Vancouver, BC, Canada, 8–12 August 2021; pp. 720–726. [Google Scholar] [CrossRef]
- Rakhymbayeva, N.; Amirova, A.; Sandygulova, A. A Long-Term Engagement with a Social Robot for Autism Therapy. Front. Robot. AI 2021, 8, 669972. [Google Scholar] [CrossRef] [PubMed]
- Brumson, B. Robotics in Security and Military Applications. 2021. Available online: https://www.automate.org/industry-insights/robotics-in-security-and-military-applications (accessed on 28 March 2023).
- Knightscope. 2022. Available online: https://www.knightscope.com (accessed on 28 March 2023).
- Taylor, J.A.; Murray, R.; Shepler, L.; Davis, A. Mitigation of Occupational Violence to Firefighters and EMS Responders; FEMA Report HSFE20-15-Q-0053; United States Fire Administration: Washington, DC, USA, 2017. Available online: https://www.usfa.fema.gov/downloads/pdf/publications/mitigation_of_occupational_violence.pdf (accessed on 28 March 2023).
- Monroe, C.M.; Van Rybroek, G.J.; Maier, G.J. Decompressing aggressive. inpatients: Breaking the aggression cycle to enhance positive outcome. Behav. Sci. Law 1988, 6, 543–557. [Google Scholar] [CrossRef]
- Roberts, A.R. Bridging the past and present to the future of crisis intervention and crisis management. In Crisis Intervention Handbook: Assessment, Treatment, and Research, 3rd ed.; Roberts, A.R., Ed.; Oxford University Press: Oxford, UK, 2005; pp. 3–34. [Google Scholar]
- National Institute for Clinical Excellence. Violence: The Short Term Management of Disturbed/Violent Behaviour in Psychiatric In-Patient Settings and Emergency Departments National Cost-Impact Report; National Institute for Clinical Excellence: London, UK, 2005. [Google Scholar]
- Richmond, J.S.; Berlin, J.S.; Fishkind, A.B.; Holloman, G.H.; Zeller, S.L.; Wilson, M.P.; Rifai, M.A.; Ng, A.T. Verbal De-escalation of the Agitated Patient: Consensus Statement of the American Association for Emergency Psychiatry Project BETA De-escalation Workgroup. West. J. Emerg. Med. 2012, 13, 17–25. [Google Scholar] [CrossRef] [PubMed]
- Todak, N.; James, L. A Systematic Social Observation Study of Police De-Escalation Tactics. Police Q. 2018, 21, 509–543. [Google Scholar] [CrossRef]
- Hallett, N.; Dickens, G.L. De-escalation: A survey of clinical staff in a secure mental health inpatient service. Int. J. Ment. Health Nurs. 2015, 24, 324–333. [Google Scholar] [CrossRef]
- Mavandadi, V.; Bieling, P.J.; Madsen, V. Effective ingredients of verbal de-escalation: Validating an English modified version of the ‘De-Escalating Aggressive Behaviour Scale’. J. Psychiatr. Ment. Health Nurs. 2016, 23, 357–368. [Google Scholar] [CrossRef]
- Nau, J.; Halfens, R.; Needham, I.; Dassen, T. The De-Escalating Aggressive Behaviour Scale: Development and psychometric testing. J. Adv. Nurs. 2009, 65, 1956–1964. [Google Scholar] [CrossRef]
- Fong, T.; Nourbakhsh, I.; Dautenhahn, K. A survey of socially interactive robots. Robot. Auton. Syst. 2003, 42, 143–166. [Google Scholar] [CrossRef] [Green Version]
- Nocentini, O.; Fiorini, L.; Acerbi, G.; Sorrentino, A.; Mancioppi, G.; Cavallo, F. A Survey of Behavioral Models for Social Robots. Robotics 2019, 8, 54. [Google Scholar] [CrossRef] [Green Version]
- Premack, D.; Woodruff, G. Does the chimpanzee have a theory of mind? Behav. Brain Sci. 1978, 1, 515–526. [Google Scholar] [CrossRef] [Green Version]
- Perner, J. Understanding the Representational Mind; MIT Press: Cambridge, MA, USA, 1991. [Google Scholar]
- Byrnes, J.D. The aggression continuum: A paradigm shift. Occup. Health Saf. 2000, 69, 70–71. [Google Scholar] [PubMed]
- McKnight, S.E. De-Escalating Violence in Health Care: Strategies to Reduce Emotional Tension and Aggression; Sigma Theta Tau International: Indianapolis, IN, USA, 2020. [Google Scholar]
- Kaplan, S.G.; Wheeler, E.G. Survival Skills for Working with Potentially Violent Clients. Soc. Casework 1983, 64, 339–346. [Google Scholar] [CrossRef]
- Yudofsky, S.C.; Kopecky, H.J.; Kunik, M.; Silver, J.M.; Endicott, J. The Overt Agitation Severity Scale for the objective rating of agitation. J. Neuropsychiatry Clin. Neurosci. 1997, 9, 541–548. [Google Scholar] [CrossRef]
- Kay, S.R.; Wolkenfeld, F.; Murrill, L.M. Profiles of Aggression among Psychiatric Patients. J. Nerv. Ment. Dis. 1988, 176, 539–546. [Google Scholar] [CrossRef]
- Takayama, L.; Pantofaru, C. Influences on proxemic behaviors in human-robot interaction. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 5495–5502. Available online: https://dl.acm.org/doi/10.5555/1732643.1732940 (accessed on 28 March 2023).
- Saskatchewan Association for Safe Workplaces in Health. De-Escalation Verbal Crisis Intervention: Education Session Participant Handout. 2019. Available online: https://www.srsd119.ca/wp-content/uploads/SSS/SASW_De-escalation_Verbal-Crisis-Intervention_WEB.pdf (accessed on 28 March 2023).
- Xiao, Z.; Zhou, M.X.; Chen, W.; Yang, H.; Chi, C. If I hear you correctly: Building and evaluating interview chatbots with active listening skills. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020; pp. 1–14. [Google Scholar] [CrossRef]
- Bejarano, A.; Lomax, O.; Scherschel, P.; Williams, T. Designing for perceived robot empathy for children in long-term care. In International Conference on Social Robotics; Springer: Cham, Switzerland, 2021; pp. 743–748. [Google Scholar]
- Law, T.; Chita-Tegmark, M.; Scheutz, M. The Interplay Between Emotional Intelligence, Trust, and Gender in Human–Robot Interaction. Int. J. Soc. Robot. 2021, 13, 297–309. [Google Scholar] [CrossRef]
- Chang, R.C.-S.; Lu, H.-P.; Yang, P. Stereotypes or golden rules? Exploring likable voice traits of social robots as active aging companions for tech-savvy baby boomers in Taiwan. Comput. Hum. Behav. 2018, 84, 194–210. [Google Scholar] [CrossRef]
- Tapus, A.; Ţăpuş, C.; Matarić, M.J. User—Robot personality matching and assistive robot behavior adaptation for post-stroke rehabilitation therapy. Intell. Serv. Robot. 2008, 1, 169–183. [Google Scholar] [CrossRef]
- Kim, J.; Kwak, S.S.; Kim, M. Entertainment robot personality design based on basic factors of motions: A case study with ROLLY. In Proceedings of the RO-MAN 2009-The 18th IEEE International Symposium on Robot and Human Interactive Communication, Toyama, Japan, 27 September–2 October 2009; pp. 803–808. [Google Scholar] [CrossRef]
- Admoni, H.; Scassellati, B. Social eye gaze in human-robot interaction: A review. J. Hum. Robot. Interact. 2017, 6, 25–63. [Google Scholar] [CrossRef] [Green Version]
- Ruhland, K.; Peters, C.E.; Andrist, S.; Badler, J.B.; Badler, N.I.; Gleicher, M.; Mutlu, B.; McDonnell, R. A Review of Eye Gaze in Virtual Agents, Social Robotics and HCI: Behaviour Generation, User Interaction and Perception. Comput. Graph. Forum 2015, 34, 299–326. [Google Scholar] [CrossRef]
- Al Moubayed, S.; Beskow, J.; Skantze, G.; Granström, B. Furhat: A back-projected human-like robot head for multiparty human-machine interaction. In Cognitive Behavioural Systems; Springer: Berlin/Heidelberg, Germany, 2012; pp. 114–130. [Google Scholar]
- Admoni, H.; Bank, C.; Tan, J.; Toneva, M.; Scassellati, B. Robot gaze does not reflexively cue human attention. Proc. Annu. Meet. Cogn. Sci. Soc. 2011, 33, 1983–1988. Available online: https://escholarship.org/uc/item/3pq1v9b0 (accessed on 28 March 2023).
- Okumura, Y.; Kanakogi, Y.; Kanda, T.; Ishiguro, H.; Itakura, S. Infants understand the referential nature of human gaze but not robot gaze. J. Exp. Child Psychol. 2013, 116, 86–95. [Google Scholar] [CrossRef] [PubMed]
- Yoshikawa, Y.; Shinozawa, K.; Ishiguro, H.; Hagita, N.; Miyamoto, T. Responsive robot gaze to interaction partner. In Robotics: Science and Systems; 2006; pp. 37–43. Available online: http://www.roboticsproceedings.org/rss02/p37.pdf (accessed on 28 March 2023).
- Yoshikawa, Y.; Shinozawa, K.; Ishiguro, H.; Hagita, N.; Miyamoto, T. The effects of robot gaze on human attention and memory in a collaborative task. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 5221–5226. [Google Scholar] [CrossRef]
- Choi, J.J.; Kim, Y.; Kwak, S.S. Have you ever Lied: The impacts of gaze avoidance on people’s perception of a robot. In Proceedings of the 2013 8th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Tokyo, Japan, 3–6 March 2013; pp. 105–106. [Google Scholar] [CrossRef]
- Chidambaram, V.; Chiang, Y.H.; Mutlu, B. Designing persuasive robots: How robots might persuade people using vocal and nonverbal cues. In Proceedings of the Seventh Annual ACM/IEEE International Conference on Human-Robot Interaction, Boston, MA, USA, 5–8 March 2012; pp. 293–300. [Google Scholar] [CrossRef]
- Ham, J.; Cuijpers, R.H.; Cabibihan, J.-J. Combining Robotic Persuasive Strategies: The Persuasive Power of a Storytelling Robot that Uses Gazing and Gestures. Int. J. Soc. Robot. 2015, 7, 479–487. [Google Scholar] [CrossRef] [Green Version]
- Leichtmann, B.; Nitsch, V. Is the Social Desirability Effect in Human–Robot Interaction overestimated? A Conceptual Replication Study Indicates Less Robust Effects. Int. J. Soc. Robot. 2021, 13, 1013–1031. [Google Scholar] [CrossRef]
- MacArthur, K.R.; Stowers, K.; Hancock, P.A. Human-robot interaction: Proximity and speed—Slowly back away from the robot! In Advances in Human Factors in Robots and Unmanned Systems; Springer: Cham, Switzerland, 2017; pp. 365–374. [Google Scholar]
- Mumm, J.; Mutlu, B. Human-robot proxemics: Physical and psychological distancing in human-robot interaction. In Proceedings of the 6th International Conference on Human-Robot Interaction, Lausanne, Switzerland, 6–9 March 2011; pp. 331–338. [Google Scholar] [CrossRef]
- Rios-Martinez, J.; Spalanzani, A.; Laugier, C. From Proxemics Theory to Socially-Aware Navigation: A Survey. Int. J. Soc. Robot. 2015, 7, 137–153. [Google Scholar] [CrossRef]
- Uzzell, D.; Horne, N. The influence of biological sex, sexuality and gender role on interpersonal distance. Br. J. Soc. Psychol. 2006, 45, 579–597. [Google Scholar] [CrossRef] [Green Version]
- Aiello, J.R. Human spatial behaviour. In Handbook of Environmental Psychology; Stokols, D., Altman, I., Eds.; Wiley: Hoboken, NJ, USA, 1987; Volume 1, pp. 505–531. [Google Scholar]
- Butler, J.T.; Agah, A. Psychological Effects of Behavior Patterns of a Mobile Personal Robot. Auton. Robot. 2001, 10, 185–202. [Google Scholar] [CrossRef]
- Baghi, B.H.; Dudek, G. Sample efficient social navigation using inverse reinforcement learning. arXiv 2021. [Google Scholar] [CrossRef]
- Chita-Tegmark, M.; Lohani, M.; Scheutz, M. Gender effects in perceptions of robots and humans with varying emotional intelligence. In Proceedings of the 2019 14th ACM/IEEE International Conference on Human–Robot Interaction (HRI), Daegu, Republic of Korea, 11–14 March 2019; pp. 230–238. [Google Scholar] [CrossRef]
- Petrides, K.V.; Furnham, A.; Martin, G.N. Estimates of Emotional and Psychometric Intelligence: Evidence for Gender-Based Stereotypes. J. Soc. Psychol. 2004, 144, 149–162. [Google Scholar] [CrossRef]
- Lopez-Zafra, E.; Gartzia, L. Perceptions of gender differences in self-report measures of emotional intelligence. Sex Roles 2014, 70, 479–495. [Google Scholar] [CrossRef]
- Walters, M.L.; Koay, K.L.; Syrdal, D.S.; Dautenhahn, K.; Te Boekhorst, R. Preferences and Perceptions of Robot Appearance and Embodiment in Human-Robot Interaction Trials. Proceedings of New Frontiers in Human-Robot Interaction. 2009. Available online: https://uhra.herts.ac.uk/bitstream/handle/2299/9642/903516.pdf?sequence=1&isAllowed=y (accessed on 28 March 2023).
- De Silva, C.W. Intelligent Control: Fuzzy Logic Applications; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Domingos, P. A few useful things to know about machine learning. Commun. ACM 2012, 55, 78–87. [Google Scholar] [CrossRef] [Green Version]
- Hinton, G.E.; Osindero, S.; Teh, Y.W. A fast learning algorithm for deep belief nets. Neural Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef] [PubMed]
- Sutton, R.S.; Barto, A.G. Reinforcement Learning: An Introduction; MIT Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Mismar, F.B.; Evans, B.L.; Alkhateeb, A. Deep Reinforcement Learning for 5G Networks: Joint Beamforming, Power Control, and Interference Coordination. IEEE Trans. Commun. 2019, 68, 1581–1592. [Google Scholar] [CrossRef] [Green Version]
- Gao, Y.; Yu, N. Deep reinforcement learning in power distribution systems: Overview, challenges, and opportunities. In Proceedings of the 2021 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 16–18 February 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Baghi, B.H.; Konar, A.; Hogan, F.; Jenkin, M.; Dudek, G. SESNO: Sample Efficient Social Navigation from Observation. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 9164–9171. [Google Scholar] [CrossRef]
- Terrill, W.; Zimmerman, L. Police Use of Force Escalation and De-escalation: The Use of Systematic Social Observation With Video Footage. Police Q. 2022, 25, 155–177. [Google Scholar] [CrossRef]
- Mnih, V.; Kavukcuoglu, K.; Silver, D.; Graves, A.; Antonoglou, I.; Wierstra, D.; Riedmiller, M. Playing Atari with deep reinforcement learning. arXiv 2013. [Google Scholar] [CrossRef]
- Clark, J.; Amodei, D. Faulty Reward Functions in the Wild. 2016. Available online: https://openai.com/blog/faulty-reward-functions/ (accessed on 28 March 2023).
- de Visser, E.J.; Peeters, M.M.M.; Jung, M.F.; Kohn, S.; Shaw, T.H.; Pak, R.; Neerincx, M.A. Towards a Theory of Longitudinal Trust Calibration in Human–Robot Teams. Int. J. Soc. Robot. 2019, 12, 459–478. [Google Scholar] [CrossRef]


{kind=link}
| Rating | Descriptor |
|---|---|
| 0 | No verbal aggression |
| 1 | Shouts angrily, curses mildly, or makes personal insults |
| 2 | Curses viciously, is severely insulting, has temper outbursts |
| 3 | Impulsively threatens violence toward others or self |
| 4 | Threatens violence toward others, either self-repeatedly or deliberately |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pierce, K.; Pepler, D.J.; Craig, S.G.; Jenkin, M. Considerations for Developing Robot-Assisted Crisis De-Escalation Practices. Appl. Sci. 2023, 13, 4337. https://doi.org/10.3390/app13074337
Pierce K, Pepler DJ, Craig SG, Jenkin M. Considerations for Developing Robot-Assisted Crisis De-Escalation Practices. Applied Sciences. 2023; 13(7):4337. https://doi.org/10.3390/app13074337
Chicago/Turabian StylePierce, Kathryn, Debra J. Pepler, Stephanie G. Craig, and Michael Jenkin. 2023. "Considerations for Developing Robot-Assisted Crisis De-Escalation Practices" Applied Sciences 13, no. 7: 4337. https://doi.org/10.3390/app13074337
APA StylePierce, K., Pepler, D. J., Craig, S. G., & Jenkin, M. (2023). Considerations for Developing Robot-Assisted Crisis De-Escalation Practices. Applied Sciences, 13(7), 4337. https://doi.org/10.3390/app13074337