

A General Stable Control Method for R-Type Underactuated Robot with Three Different Initial Situations


Abstract
:1. Introduction
- (1)
- A general control method is proposed for a planar 2R underactuated robot.
- (2)
- This general control method can realize stable control when the initial velocity is nonzero for the planar 2R underactuated robot.
- (3)
- The proposed method improves the interference immunity of the planar R-type underactuated robot.
- (4)
- The proposed control method for the planar 2R underactuated robot may be widely applied to the other planar R-type underactuated robots with different degrees of freedom.
2. Preparations
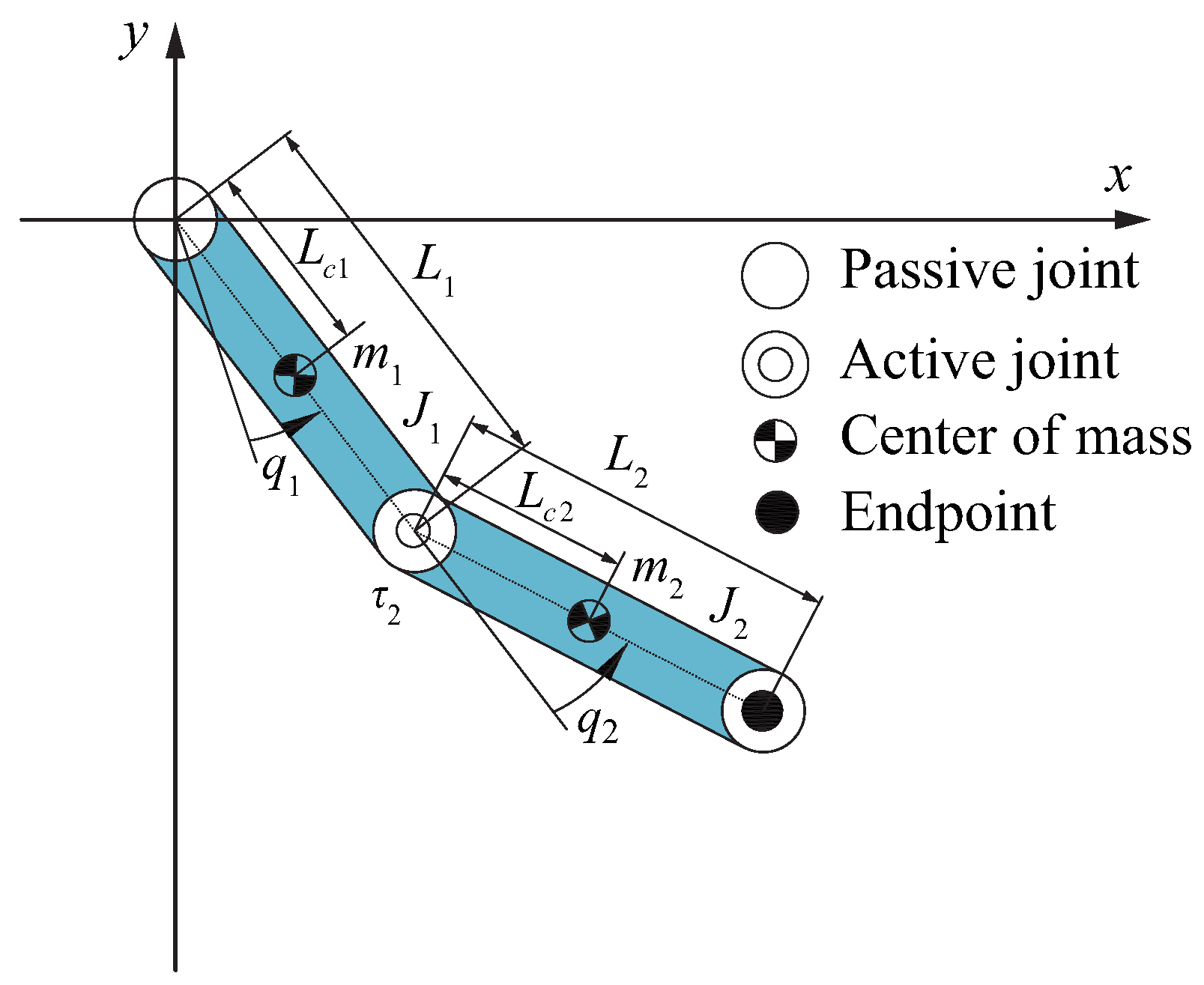
2.1. Model
2.2. Underactuated Constraint Analysis
3. Realization of the Objective of the Actuated Links
3.1. The Trajectory of the First Part
3.2. Tracking Controller Design
4. Realization of the Objective of the Underactuated Link
4.1. Trajectory Planning
4.2. Trajectory Parameter Solution Based on the Differential Evolution Algorithm
| Algorithm 1: Trajectory parameters calculation. |
 |
4.3. Tracking Controller Design
5. Simulations
5.1. Situation I: Zero Initial Velocity
5.2. Situation II: Nonzero Initial Velocity
5.3. Situation III: Disturbance Rejection
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, D.Q.; Li, X.A.; Yang, M.D.; Wang, F.; Xu, H. Non-random vibration analysis of rotate vector reducer. J. Sound Vib. 2023, 542, 117380. [Google Scholar] [CrossRef]
- Huang, P.; Huang, H.Z.; Li, Y.F.; Li, H. Positioning accuracy reliability analysis of industrial robots based on differential kinematics and saddlepoint approximation. Mech. Mach. Theory 2021, 162, 104367. [Google Scholar] [CrossRef]
- Niu, G.J.; Pan, B.; Fu, Y.L.; Qu, C.C. Development of a new medical robot system for minimally invasive surgery. IEEE Access 2020, 8, 144136–144155. [Google Scholar] [CrossRef]
- Sun, Y.; Wang, R. The research framework and evolution of service robots. J. Comput. Inf. Syst. 2019, 141, 227–234. [Google Scholar] [CrossRef]
- Herman, P. A quasi-velocity-based tracking controller for a class of underactuated marine vehicles. Appl. Sci. 2022, 12, 8903. [Google Scholar] [CrossRef]
- Yu, J.L.; Li, Z.; Lu, L.; Zhang, Y.S. Switching neural network control for underactuated spacecraft Formation reconfiguration in elliptic orbits. Appl. Sci. 2022, 12, 5792. [Google Scholar] [CrossRef]
- Li, G.Y.; Chen, B.J.; Chen, H.Y.; Deng, W. Fractional-order PIλDμ controller using adaptive neural fuzzy model for course control of underactuated ships. Appl. Sci. 2022, 12, 5604. [Google Scholar] [CrossRef]
- Yang, T.; Sun, N.; Chen, H.; Fang, Y.C. Neural network-based adaptive antiswing control of an underactuated ship-mounted crane with roll motions and input dead zones. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 901–914. [Google Scholar] [CrossRef]
- Yang, T.; Sun, N.; Chen, H.; Fang, Y.C. Observer-based nonlinear control for tower cranes suffering from uncertain friction and actuator constraints with experimental verification. IEEE Trans. Ind. Electron. 2021, 68, 6192–6204. [Google Scholar] [CrossRef]
- Zhao, W.; Liu, H.; Lewis, F. Data-driven fault-tolerant control for attitude synchronization of nonlinear quadrotors. IEEE Trans. Autom. Control. 2021, 66, 5584–5591. [Google Scholar] [CrossRef]
- Jin, X.Z.; Che, W.W.; Wu, Z.G.; Deng, C.D. Robust adaptive general formation control of a class of networked quadrotor aircraft. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 7714–7726. [Google Scholar] [CrossRef]
- Di, Z.; Sandipan, M.; Farhan, G. A differential-flatness-based approach for autonomous helicopter shipboard landing. IEEE/ASME Trans. Mechatronics 2022, 27, 1557–1569. [Google Scholar] [CrossRef]
- Raj, N.; Banavar, R.N.; Abhishek; Kothari, M. Robust attitude tracking for aerobatic helicopters: A geometric approach. IEEE Trans. Control. Syst. Technol. 2021, 29, 150–164. [Google Scholar] [CrossRef]
- Huang, Y.T.; Zhu, M.; Zheng, Z.W.; Low, K.H. Linear velocity-free visual servoing control for unmanned helicopter landing on a dhip with visibility constraint. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 2979–2993. [Google Scholar] [CrossRef]
- Gu, N.; Wang, D.; Peng, Z. Observer-based finite-time control for distributed path maneuvering of underactuated unmanned surface vehicles with collision avoidance and connectivity preservation. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 5105–5115. [Google Scholar] [CrossRef]
- Lai, J.; Lu, B.; Chu, H. Variable-stiffness control of a dual-segment soft robot using depth vision. IEEE/ASME Trans. Mechatronics 2022, 27, 1034–1045. [Google Scholar] [CrossRef]
- Huang, Z.X.; Li, X.P.; Wang, J.R.; Zhang, Y.; Mei, J.F. Human pulse detection by a soft tactile actuator. Sensors 2022, 27, 5047. [Google Scholar] [CrossRef]
- Huang, Z.X.; Lai, X.Z.; Zhang, P.; Meng, Q.X.; Wu, M. A general control strategy for planar 3-DoF underactuated manipulators with one passive joint. Inf. Sci. 2020, 534, 139–153. [Google Scholar] [CrossRef]
- Huang, Z.X.; Wei, S.Q.; Hou, M.Y.; Wang, L.J. Finite-time control strategy for swarm planar underactuated robots via motion planning and intelligent algorithm. Mearsurement Control 2023, 56, 813–819. [Google Scholar] [CrossRef]
- Huang, Z.X.; Lai, X.Z. Control strategy based on iterative method for planar Pendubot. In Proceedings of the 37th Chinese Control Conference, Wuhan, China, 25–27 July 2018; pp. 858–861. [Google Scholar]
- Zhang, P.; Lai, X.Z.; Wang, Y.W. A novel position-posture control method using intelligent optimization for planar underactuated mechanical systems. Mech. Mach. Theory 2019, 140, 258–273. [Google Scholar] [CrossRef]
- Huang, Z.X.; Lai, X.Z.; Wang, Y.W. Position control of planar three-link underactuated manipulator based on trajectory planning. Control. Decis. 2020, 35, 382–388. [Google Scholar]
- Huang, Z.X.; Wang, L.J. Review of control method of planar underactuated mechanical system. J. Wuhan Inst. Technol. 2021, 43, 448–454. [Google Scholar]
- Lai, X.Z.; Wang, L.J.; Cao, J.Q.; Wu, M. A simple and quick control strategy for a class of first-order nonholonomic manipulator. Nonlinear Dyn. 2016, 85, 2261–2276. [Google Scholar] [CrossRef]
- Zhang, P.; Lai, X.Z.; Wang, Y.W. Effective position-posture control strategy based on switching control for planar three-link underactuated mechanical system. Int. J. Syst. Sci. 2017, 48, 2202–2211. [Google Scholar] [CrossRef]
- Rsetam, K.; Cao, Z.; Wang, L.; Al-Rawi, M.; Man, Z. Practically robust fixed-time convergent sliding mode control for underactuated aerial flexible joint robots manipulators. Drones 2022, 6, 428. [Google Scholar] [CrossRef]
- Romano, D.; Wahi, A.; Miraglia, M. Development of a novel underactuated robotic fish with magnetic transmission system. Sensors 2022, 10, 755. [Google Scholar] [CrossRef]
- Huang, Z.X.; Lai, X.Z.; Zhang, P.; Wu, M. Trajectory planning and tracking control for positioning of planar three-link underactuated manipulator. In Proceedings of the Asian Control Conference, Kitakyushu, Japan, 9–12 June 2019; pp. 1243–1247. [Google Scholar]
- Huang, Z.X.; Zhou, Y.S.; Chen, Z.; Wang, W.; Wang, L.J. An universal control strategy for planar 2-DoF underactuated manipulator with one passive joint. In Proceedings of the Chinese Control Conference, Shanghai, China, 26–28 July 2021; pp. 468–472. [Google Scholar]
- Sheng, Y.; Lai, X.Z.; Wu, M. Position control of a planar three-link underactuated mechanical system based on model reduction. Acta Autom. Sin. 2014, 40, 1303–1310. [Google Scholar]
- Huang, Z.X.; Chen, Z.; Li, J.; Wang, L.J. Comprehensive unified control strategy for plananr 2-Link underactuated manipulators. In Proceedings of the Chinese Control and Decision Conference, Kunming, China, 22–24 May 2021; pp. 4514–4518. [Google Scholar]
- Huang, Z.X.; Qin, X.Y.; Wei, S.Q.; Wang, L.J. A finite-time posture control strategy for the swarm underactuated robots. In Proceedings of the Chinese Conference on Swarm Intelligence and Cooperative Control, Shenzhen, China, 28–30 October 2022; pp. 912–920. [Google Scholar]
- Huang, Z.X.; Qin, X.Y.; Chen, Z.; Wang, L.J. Position-posture control of underactuated manipulator based on intelligent optimization algorithm. Control. Eng. China 2022, 29, 1948–1953. [Google Scholar]
- Huang, Z.X.; Wan, X.; Zhou, Y.S.; Wang, L.J.; Wang, L.H. Stable control and disturbance rejection strategy for planar 2R underactuated robot via intelligent algorithm. In Proceedings of the Annual Conference of the Industrial Electronics Society, Brussels, Belgium, 17–20 October 2022. [Google Scholar] [CrossRef]
- Li, J.; Wang, L.J.; Chen, Z.; Huang, Z.X. Drift suppression control based on online intelligent optimization for planar underactuated manipulator with passive middle joint. IEEE Access 2021, 9, 38611–238619211. [Google Scholar] [CrossRef]
- Huang, Z.X.; Lai, X.Z.; Wang, Y.W.; Wu, M. Position control for planar 3R underactuated manipulator with second-order non-holonomic constraints. J. Southeast Univ. (Nat. Sci. Ed.) 2019, 49, 245–250. [Google Scholar]
- Wang, Y.W.; Lai, X.Z.; Zhang, Y.P.; Wu, M. Adaptive robust control for planar n-link underactuated manipulator based on radial basis function neural network and online iterative correction method. J. Frankl. Inst. 2018, 355, 8373–8391. [Google Scholar] [CrossRef]
- Wang, Y.W.; Lai, X.Z.; Zhang, P.; Wu, M. Control strategy based on model reduction and online intelligent calculation for planar n-Link underactuated manipulators. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 1046–1054. [Google Scholar] [CrossRef]
- Xiong, P.Y.; Lai, X.Z.; Wu, M. A stable control for second-order nonholonomic planar underactuated mechanical system: Energy attenuation approach. Int. J. Control. 2018, 91, 1630–1639. [Google Scholar] [CrossRef]
- Liu, D.; Lai, X.Z.; Wang, Y.W.; Wang, X.B. Position control for planar four-link underactuated manipulator with a passive third joint. ISA Trans. 2019, 87, 46–54. [Google Scholar] [CrossRef]
- Wu, J.D.; Ye, J.W.; Wang, Y.W.; Su, C.Y. A general position control method for planar underactuated manipulators with second-order nonholonomic constraints. IEEE Trans. Cybern. 2021, 51, 4733–4742. [Google Scholar] [CrossRef]
- Huang, Z.X.; Qin, X.Y.; Wang, L.J.; Zhang, P. A general control strategy of planar multi-link underactuated manipulator with passive last joint based on nilpotent approximation and intelligent optimization. In Proceedings of the Chinese Automation Congress, Shanghai, China, 6–8 November 2020; pp. 4029–4031. [Google Scholar]
- Lai, X.Z.; Zhang, P.; Wang, Y.W.; Chen, L.F.; Wu, M. Continuous state feedback control based on intelligent optimization for first-order nonholonomic systems. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 2534–2540. [Google Scholar] [CrossRef]
- Gao, X.; Ren, Z.; Zhai, L.; Jia, Q.X.; Liu, H.H. Two-Stage switching hybrid control method based on improved PSO for planar three-link under-actuated manipulator. IEEE Access 2019, 7, 76263–76273. [Google Scholar] [CrossRef]
- Huang, Z.X.; Qin, X.Y.; Wang, J.L. Position control of second-order Nonholonomic planar underactuated mechanical system. J. Wuhan Inst. Technol. 2021, 43, 567–572. [Google Scholar]
- Huang, Z.X.; Lai, X.Z.; Zhang, P. Virtual model reduction-based control strategy of planar three-link underactuated manipulator with middle passive joint. Int. J. Control. Autom. Syst. 2020, 19, 29–39. [Google Scholar] [CrossRef]
- Arai, H.; Tanie, K.; Shiroma, N. Nonholonomic control of a three-DOF planar underactuated manipulator. IEEE Trans. Robot. Autom. 1998, 14, 681–695. [Google Scholar] [CrossRef]
- Cao, J.Q.; Lai, X.Z.; Wu, M. Position control method fora planar Acrobot based on fuzzy control. In Proceedings of the China Control Conference, Hangzhou, China, 28–30 July 2015; pp. 922–926. [Google Scholar]
- Lai, X.Z.; She, J.H.; Cao, W.H.; Yang, S.X. Stabilization of underactuated planar acrobot based on motion-state constraints. Int. J. Non-Linear Mech. 2015, 77, 342–347. [Google Scholar] [CrossRef]
- He, G.P.; Wang, Z.L.; Zhang, J.; Geng, Z.Y. Characteristics analysis and stabilization of a planar 2R underactuated manipulator. Robotica 2016, 34, 584–600. [Google Scholar] [CrossRef]
- Wu, J.D.; Wang, Y.W.; Ye, W.J.; Sun, C.Y. Control strategy based on Fourier transformation and intelligent optimization for planar Pendubot. Inf. Sci. 2019, 491, 279–288. [Google Scholar] [CrossRef]
- Carsten, K.; Klaus, R. Control of underactuated manipulator using similarities to the double integrator. In Proceedings of the 18th IFAC World Congress, Milan, Italy, 28 August–2 September 2011; pp. 11501–11507. [Google Scholar]
- Lai, X.Z.; Zhang, P.; Wang, Y.W.; Wu, M. Position-posture control of a planar four-link underactuated manipulator based on genetic algorithm. IEEE Trans. Ind. Electron. 2017, 64, 4781–4791. [Google Scholar] [CrossRef]
- Lai, X.Z.; Wang, Y.W.; Wu, M.; Cao, W.H. Stable control strategy for planar three-link underactuated mechanical system. IEEE/ASME Trans. Mechatronics 2016, 21, 1345–1356. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential evolution-a simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Yang, M.; Li, C.H.; Cai, Z.H.; Guan, J. Differential evolution with auto-enhanced population diversity. IEEE Trans. Cybern. 2015, 45, 341–359. [Google Scholar] [CrossRef]
- LaSalle, J.P. Stability theory for ordinary differential equations. J. Differ. Equ. 1968, 4, 57–65. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link i | () | () | () | |
|---|---|---|---|---|
| 1.0 | 1.0 | 0.5 | 0.0833 | |
| 1.0 | 1.0 | 0.5 | 0.0833 |
| Link i | () | () | () | |
|---|---|---|---|---|
| 0.2 | 0.5 | 0.25 | 0.0042 | |
| 0.5 | 0.8 | 0.40 | 0.0267 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Z.; Hou, M.; Hua, Y.; Yu, C.; Wang, L. A General Stable Control Method for R-Type Underactuated Robot with Three Different Initial Situations. Appl. Sci. 2023, 13, 5565. https://doi.org/10.3390/app13095565
Huang Z, Hou M, Hua Y, Yu C, Wang L. A General Stable Control Method for R-Type Underactuated Robot with Three Different Initial Situations. Applied Sciences. 2023; 13(9):5565. https://doi.org/10.3390/app13095565
Chicago/Turabian StyleHuang, Zixin, Mengyu Hou, Yong Hua, Chengsong Yu, and Lejun Wang. 2023. "A General Stable Control Method for R-Type Underactuated Robot with Three Different Initial Situations" Applied Sciences 13, no. 9: 5565. https://doi.org/10.3390/app13095565
APA StyleHuang, Z., Hou, M., Hua, Y., Yu, C., & Wang, L. (2023). A General Stable Control Method for R-Type Underactuated Robot with Three Different Initial Situations. Applied Sciences, 13(9), 5565. https://doi.org/10.3390/app13095565