1. Introduction
Global shipping, accounting for over 80 percent of world merchandise trade by volume, has been rapidly embracing technological advancements, particularly in the realm of maritime autonomous surface ships (MASS) [
1]. This shift has been driven by the recognition of vulnerabilities in global supply chains, as highlighted during the 2019 COVID-19 pandemic, when labor shortages and widespread lockdowns disrupted international trade. The autonomous ships market, already a billion-dollar industry, is poised for substantial growth in the coming years [
2]. The deployment of MASS is anticipated to bring about cost reductions and enhance the resilience of global supply chains against labor shortages and external shocks. Additionally, the implementation of autonomous ships could contribute to offshore safety by mitigating accidents attributed to human error and negating the need for human operators in challenging sea conditions [
3], though some argue the extent of this impact is uncertain [
4,
5]. Furthermore, proponents believe that the introduction of MASS has the potential to decrease greenhouse gas emissions and enhance port efficiency through practices such as slow-steaming and improved route planning.
Maritime autonomous surface ships, one of the innovative advances in the field of maritime transport, have attracted considerable attention and are under development in many countries. For example, the EU has evaluated the economic, technological, and legal validity of MASS via the Maritime Unmanned Navigation through Intelligence in Networks project [
6]. In Finland, Rolls-Royce developed an MASS able to can operate in coastal waters via the Advanced Autonomous Waterborne Application (AAWA) project. The AAWA project played an important role in accelerating the development and commercialization of MASS technologies and has contributed to shaping the future of the maritime transport industry [
7]. In Norway, Kongsberg Gruppen ASA, a marine technology company, and YARA International, a fertilizer manufacturer, cooperated to develop the world’s first electric battery-powered autonomous container ship [
8]. In South Korea, the Korean Autonomous Surface Ship project led by the government aims to improve the safety of MASS as well as to develop and verify related technologies [
9].
Efforts to enhance automation in maritime shipping have been ongoing for several years, with the International Maritime Organization (IMO) playing a pivotal role in guiding the development of MASS in collaboration with regulators, industry stakeholders, and researchers [
10]. Several essential advancements are required for MASS to reach full autonomy. The key technologies used in MASS include sensing the surrounding environment using various sensors (e.g., radar, sonar, light detection and ranging, GPS, and cameras) [
11,
12,
13,
14,
15], artificial intelligence (AI) and machine learning technologies that are used to direct the navigation by analyzing the sensor data [
16,
17], and navigation automation systems that set the course of a ship, adjust its speed, and automatically perform navigation tasks (e.g., collision avoidance) [
18,
19,
20,
21]. One crucial challenge involves the development of robust path planning and collision avoidance systems capable of navigating waters safely, considering the presence of other autonomous and traditional vessels, and adhering to the rules of the road at sea as defined by the Convention on the International Regulations for Preventing Collisions at Sea (COLREG).
Hinostroza et al. [
22] introduced a control system for autonomous surface vessels featuring a path-planning algorithm based on the angle-guidance fast marching square method and a path-following algorithm utilizing the line-of-sight tracking approach. Xu et al. [
23] proposed a modified vector field path-following control system for underactuated autonomous surface ships that simultaneously addressed both path following and obstacle avoidance. This integrated approach allows autonomous ships to navigate predefined paths while efficiently avoiding static obstacles. Xu et al. [
24] presented a waypoint-following algorithm for a marine surface ship model, incorporating a PID heading autopilot controller based on Nomoto’s second model. The controller parameters are identified using a least squares support vector machine and a smooth curved path is generated through piecewise cubic Hermite interpolation to minimize errors. Hinostroza et al. [
25] proposed a methodology in which two autonomous surface vehicles (ASVs) demonstrate advanced cooperative navigation in a complex marine environment, utilizing the angle-guidance fast marching square method for motion planning and vector-field path-following for enhanced path accuracy. Equipped with state-of-the-art sensors and a PID control system, these ASVs effectively navigate complex environments, showcasing the efficacy of their technical approach in controlled experimental conditions. Vagale et al. [
26] developed collision avoidance algorithms with partial adherence to COLREG as an ongoing process over several years. Similarly, Woerner [
27] made significant contributions by emphasizing the importance of COLREG compliance, incorporating human-like behavior, and addressing scenarios involving non-compliant actors. Johansen et al. [
28] utilized mathematical interpretations of COLREG rules to frame the challenge of devising a protocol-compliant and collision-free trajectory within the framework of Model Predictive Control (MPC). Eriksen et al. [
29] and Kufoalor et al. [
30] subsequently demonstrated field applications of MPC-based collision avoidance algorithms. However, a notable limitation in most proposed algorithms is their assumption of access to nearly perfect information. Moreover, the utilization of information obtained through communication channels beyond the Automatic Identification System (AIS) is seldom integrated into these algorithms.
Technology verification is the process of verifying the effective operation of new technologies or products in an actual environment. In general, it involves proof of concept, prototype development, pilot testing, performance evaluation, compliance with regulations and certification, market readiness assessment, and a pre-launch review. The verification of MASS technologies is necessary to ensure their safety and regulatory compliance. During verification, the accuracy and reliability of sensors, AI, and navigation automation systems are examined and their reliability under unexpected conditions is verified [
31]. The process is helpful in building reliable technologies and optimizing performance, and can promote technological development by considering user and environmental requirements for sustainable maritime transport.
Currently, the key technologies used in MASS are verified by installing them in full-scale ships. In addition, simulation environments are used to evaluate performance in dangerous or extreme situations. Performance evaluation in simulation environments has clear limitations; hence, methods to verify performance in the actual environment are necessary [
32].
Consequently, in this study, we aimed to develop a system that evaluates the performance of the key technologies used in MASS by generating virtual traffic environment similar to the actual maritime traffic environment, making it possible to evaluate performance in dangerous or extreme situations.
It was determined that the developed synthetic maritime traffic generation system can be used to safely and effectively evaluate the performance of the key technologies used in MASS in dangerous or severe situations as well as in general situations, potentially improving the reliability of technologies and optimizing their performance.
The main contributions of this paper are as follows:
Development of the S-MTGS to evaluate the performance of collision avoidance and navigation automation systems used in MASS;
Generation of a virtual traffic environment that closely resembles actual maritime traffic conditions, with the aim of creating realistic scenarios for systems evaluation and crew training, among other purposes;
Development of an intelligent navigation system, especially focusing on route tracking and a collision avoidance algorithm;
Motivation to evaluate the performance of MASS technologies.
The rest of the paper is structured as follows. We briefly introduce the synthetic maritime traffic generation system in
Section 2, where we introduce the system consisting of the maritime traffic generator and collision avoidance algorithm. In
Section 3, the maritime traffic generator is discussed in detail along with configuration of the generator and the key algorithms. In
Section 4, we discuss the characteristics of the collision avoidance algorithm used in the system. In
Section 5, evaluation using the synthetic maritime traffic generation system is discussed along with the results. Finally, our conclusions are presented in
Section 6.
2. Synthetic Maritime Traffic Generation System (S-MTGS)
S-MTGS consists of a maritime traffic generator and a collision avoidance algorithm. The maritime traffic generator generates virtual ship information via absolute and relative position methods.
The absolute position method generates nearby ships based on a scenario that uses historical maritime traffic data from specific regions. The relative position method creates a virtual maritime traffic environment by generating nearby ships based on the encounter situation with the own ship, i.e., the encounter situation according to the Convention on the International Regulations for Preventing Collisions at Sea (COLREG), Distance to Closest Point of Approach (DCPA), Time to Closest Point of Approach (TCPA), and distance. The virtual ships generated based on the encounter situation with the own ship may perform collision avoidance with nearby ships, including the own ship, using the collision avoidance algorithm.
The collision avoidance algorithm consists of ship detection, risk calculation, COLREG judgment, and avoidance action decision modules. It can initiate avoidance actions even when multiple ships are encountered by examining the encounter situations based on COLREG.
3. Maritime Traffic Generator
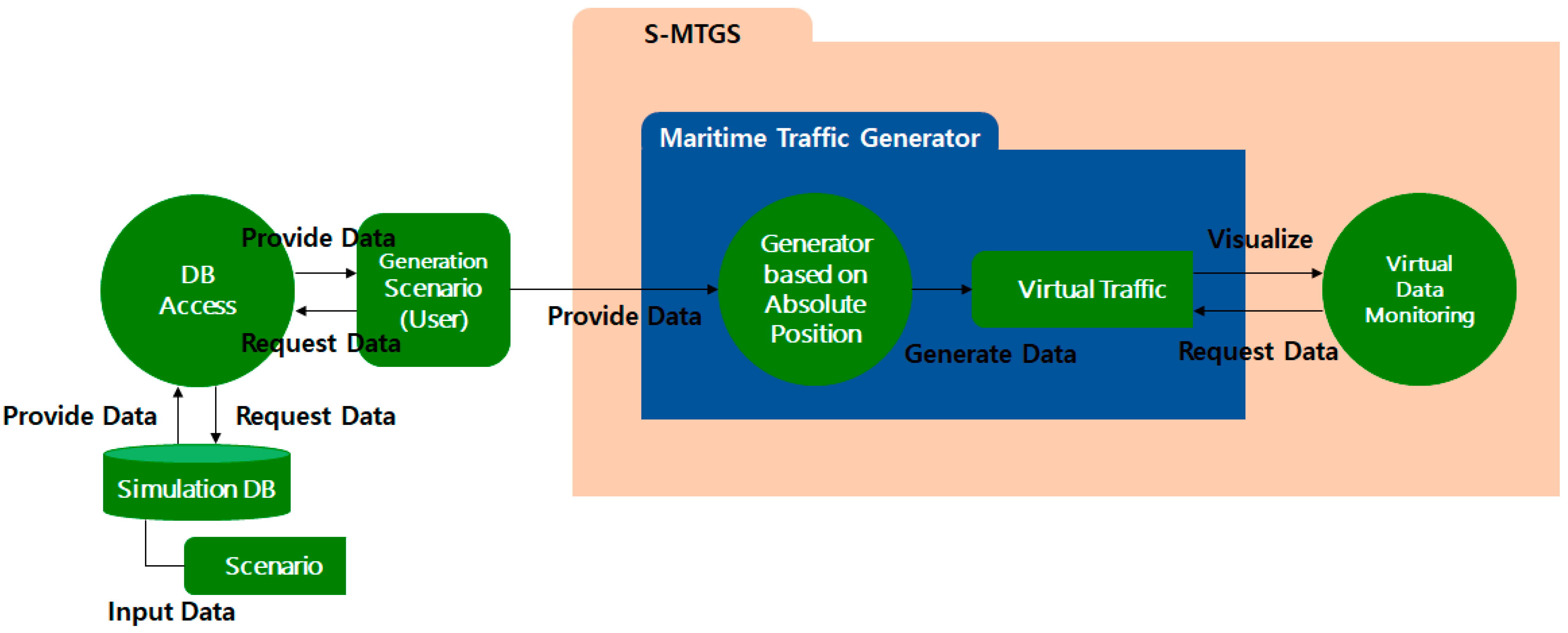
The maritime traffic generator creates a virtual maritime traffic environment similar to the actual maritime traffic environment. It consists of a generator based on absolute position (GAP) and a generator based on relative position (GRP). The maritime traffic environment can be categorized into two main factors: environmental elements such as waves, wind, and currents, and the ship’s maneuvering and propulsion characteristics. The interaction of these factors ultimately manifests as changes in the positions of other vessels. This generator employs GAP and GRP to create positions for other ships that accurately reflect these characteristics. Therefore, it can be described as a maritime traffic generator that considers both environmental conditions and ship-specific features. Both generators generate virtual ships in their own ways and provide the user with a virtual maritime traffic environment through virtual data monitoring system.
Figure 1 shows the configuration of the maritime traffic generator, which consists of GAP and GRP to generate the virtual ship data.
GAP is a basic method to generate virtual ships. The user can create multiple scenarios according to the purpose and retrieve the virtual maritime traffic environment of the desired scenario through GAP [
33].
Figure 2 shows the configuration of GAP, which generates virtual ships based on historical maritime data stored in the scenario database, and
Figure 3 shows the scenario-related configuration of the simulation database, which consists of the Scenario, Scenario Ship, Traffic Ship, and Harbor Path tables.
GRP generates virtual ships based on the encounter situation with the own ship, DCPA, TCPA, and distance. When GRP receives the virtual ship generation conditions and information of the own ship, the COLREG-based position judgment algorithm determines the positions of the virtual ships and the ship vector judgment algorithm determines the speed of ground (SOG) and course of ground (COG) of the virtual ships.
Figure 4 shows the configuration of GRP.
The COLREG-based position judgment algorithm receives the virtual ship generation conditions and data on the own ship and determines the positions of virtual ships based on the encounter situation and the distance between the own ship and virtual ships according to COLREG. The ship vector judgment algorithm determines the SOG and COG of the virtual ships according to the DCPA and TCPA conditions of the own ship and virtual ships through iterative methods after receiving the virtual ship generation conditions, information on the own ship, and the positions of the virtual ships determined by the COLREG-based position judgment algorithm.
Algorithm 1 shows the pseudocode of the COLREG-based position judgment algorithm, which identifies encounter states such as overtaken, overtaking, head-on, and crossing based on the bearing of the encountering ship. Algorithm 2 shows the pseudocode of the ship vector judgment algorithm, which determines the SOG and COG that meet specific DCPA and TCPA criteria based on the ship’s position.
| Algorithm 1. COLREG-based position judgment algorithm |
| 1 | procedure: PSEUDOCODE FOR VDG_1 Get_COLREG2PSN() |
| 2 | Input: COLREG_case, Range |
| 3 | = overtaking tolerance (default 45°) |
| 4 | = head-on tolerance (default 5°) |
| 5 | = crossing aspect limit tolerance (default 5°) |
| 6 | select case Determining the Appropriate Rule set() |
| 7 | case (Vessel is overtaken(stand-on)()): start_Bearing = 112.5, end_Bearing = 247.5 |
| 8 | case (Vessel is overtaking(give-away)()): start_Bearing = , end_Bearing = |
| 9 | case (Vessel is head-on()): start_Bearing = , end_Bearing = |
| 10 | case (Vessel is crossing(give-away)()): start_Bearing = , end_Bearing = 247.5 |
| 11 | case (Vessel is crossing(stand-on)()): start_Bearing = , end_Bearing = 112.5 |
| 12 | Bearing ← get_Guassian(start_Bearing, end_Bearing) |
| 13 | Position ← get_PSN(Range, Bearing) |
| 14 | end procedure |
| Algorithm 2. Ship vector judgment algorithm |
| 1 | procedure: PSEUDOCODE FOR VDG_2 Get_CPA2SOG_COG() |
| 2 | Input: DCPA, TCPA, own_Position, own_SOG, own_COG, other_Position |
| 3 | SOG_itr = step for SOG iteration (default 0.1 knots) |
| 4 | COG_itr = step for COG iteration (default 0.1°) |
| 5 | for SOG_itr, COG_itr do |
| 6 | Get_DCPA(own_Position, own_SOG, own_COG, other_Position, SOG_itr, COG_itr) |
| 7 | if (SOG_itr < SOG_small && COG_itr < COG_small) then |
| 8 |
break |
| 9 |
end if |
| 10 |
end for |
| 11 | SOG ← SOG_itr |
| 12 | COG ← COG_itr |
| 13 | end procedure |
4. Collision Avoidance Algorithm
The collision avoidance algorithm consists of ship detection, risk calculation, COLREG judgment, and avoidance action decision modules. The ship detection module detects nearby ships and recognizes the situation. In general, ship detection modules applied to actual ships use multi-sensor fusion technology to overcome the characteristics and noise of various sensors. However, the ship detection module described in this paper is specifically used to avoid collisions between the generated virtual ship and the own ship or other ships that have already been identified. It is configured with a simple logic that measures distance to determine whether a ship is potentially dangerous.
The risk calculation module calculates the risks from the detected ships and determines avoidance and priorities. The COLREG judgment module induces avoidance against the ships for which avoidance and priorities are determined according to COLREG [
34]. The avoidance action decision module determines the position of the helm that must be used to move to the predetermined avoidance position.
Figure 5 shows the configuration of the collision avoidance algorithm [
35].
The ship detection module determines the collision risk as well as the time and distance at which action must be initiated. Based on a case in which DCPA was analyzed to be more than one mile when the other ship was first detected at a distance of more than eight miles on the sea and less than one mile when it was first detected at a distance of less than eight miles [
36], the target of this algorithm was set to less than eight miles. Algorithm 3 shows the pseudocode of the ship detection module.
In this module, the distance of a ship is calculated using Equations (1)–(5):
where
denotes the distance,
denotes the position of own ship,
denotes the position of the other ship,
denotes the longitudinal velocity,
denotes the lateral velocity,
denotes the prime vertical radius of curvature,
denotes the meridian radius of curvature,
is the semi major axis,
is the semi minor axis,
f = 1/298.257223563 is the flattening factor (Reference ellipsoid name: WGS-84), and
denotes the first eccentricity.
| Algorithm 3. Ship detection module |
| 1 | procedure: PSEUDOCODE FOR CA_1 Detect_Ship() |
| 2 | Input: List of Ship |
| 3 | check Time Interval |
| 4 | for each Ship do |
| 5 | if (< 8) then |
| 6 | Add at List of Detect ship |
| 7 |
end if |
| 8 |
end for |
| 9 | end procedure |
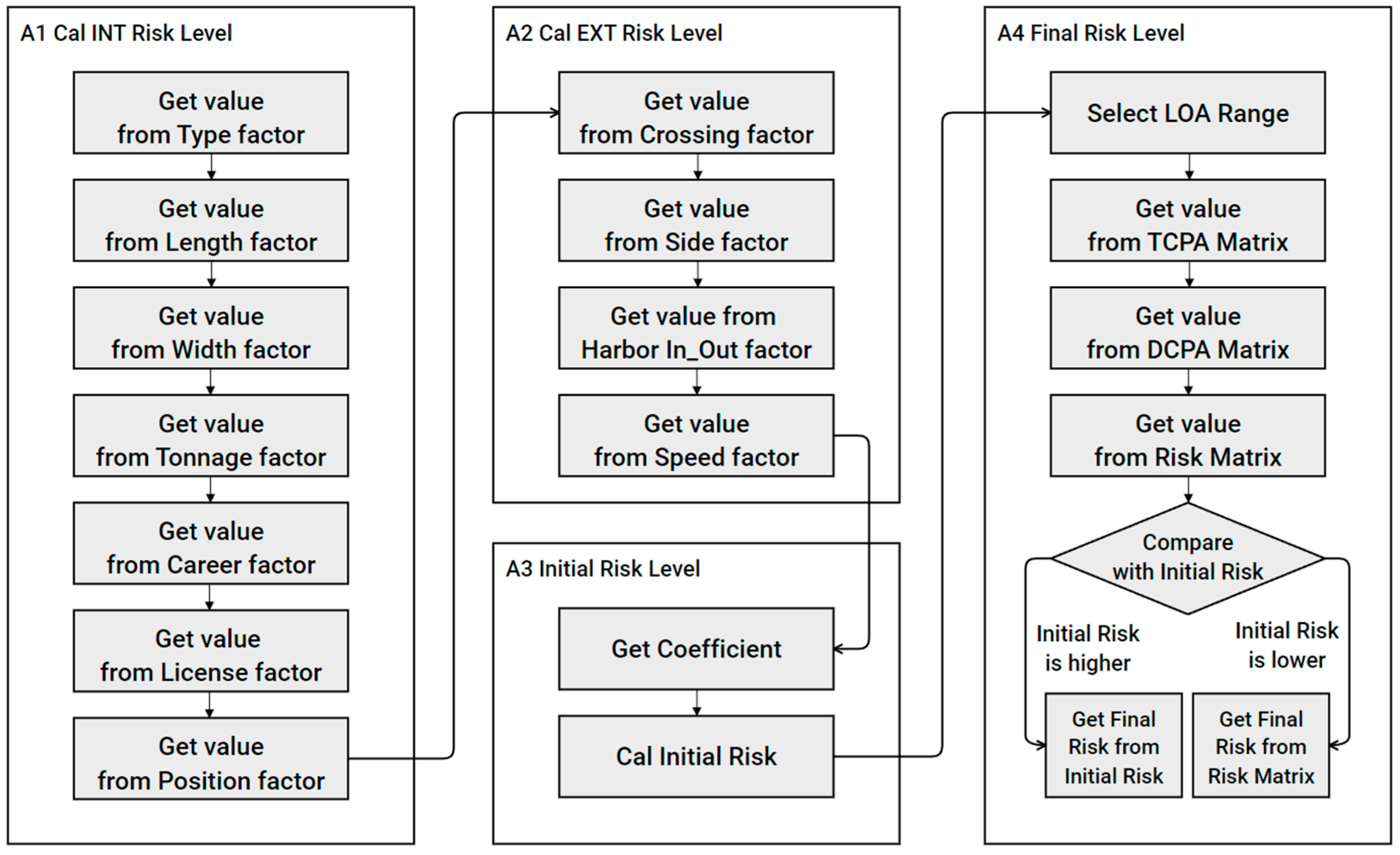
The risk calculation module calculates the risk from the detected ships. Many theories of risk have been proposed. In this algorithm, the maritime traffic risk [
37,
38] is calculated based on the parameters determined by characteristics of coastal areas in Korea and the perceptions of ship operators. This model has the advantage that it reflects the risk perceived by actual navigators. However, some of the factors required for risk measurement cannot be easily obtained; hence, risk calculation is difficult. Algorithms A1–A4 in
Appendix A present the pseudocodes of the risk calculation module, while
Figure 6 shows the flowchart of the risk calculation module.
The COLREG judgment module distinguishes between give-way and stand-on vessels depending on the encounter situation and induces avoidance based on the pre-determined rules; thus, collision avoidance operation can be performed in a way similar to that used by ship operators. According to the rules, the stand-on vessel must maintain its course and speed, and can take avoidance actions under the judgment that the give-way vessel does not take appropriate measures. The judgment module functions accordingly. Algorithms A5–A7 in
Appendix A show the pseudocodes of the COLREG judgment module [
39]. The avoidance action decision module determines the position of the helm that must be used to move to the predetermined avoidance position. To this end, Proportional-Differential (PD) or Proportional-Integral-Differential (PID) controllers are generally used in ships. While PD controllers have a higher time constant than PID controllers, they are stable and have excellent response characteristics owing to small overshoot and short correction time. Thus, a PD controller was used in this algorithm [
40]. Algorithm 4 shows the pseudocode of the avoidance action decision module with P and D gains determined by length of all (LOA), Beam, and SOG according to the difference between COG and HDG.
| Algorithm 4. Avoidance action decision module |
| 1 | procedure: PSEUDOCODE FOR CA_8 Decide_Avoid_Action() |
| 2 | Input: LOA, Beam, SOG, COG, HDG |
| 3 | m_fZeta = 10 |
| 4 | fAutoRudder = COG HDG |
| 5 | fAutok = (0.428419 + 0.19936 × LOA/Beam) × SOG/LOA |
| 6 | fAutoP = (1.94599 0.04104 × LOA/Beam) × LOA/SOG |
| 7 | fOmegaB = 1/fAutoT |
| 8 | fOmegaN = fOmegaB/(sqrt(1 2 × pow(m_fZeta × 0.1, 2) + |
| 9 | sqrt(4 × pow(m_fZeta × 0.1, 4) 4 × pow(m_fZeta × 0.1, 2) + 2 |
| 10 | fAutoKP = fAutoT × pow(fOmegaN, 2)/fAutoK |
| 11 | fAutoKD = (2 × fAutoT × m_fZeta × 0.1 × fOmegaN-1)/fAutoK |
| 12 | ROT = get_ROT() |
| 13 | dCmdRudder = fAutoKP × fAutoRudder + fAutoKD × ROT |
| 14 | end procedure |
6. Discussion
The development and implementation of the S-MTGS marks a significant leap forward in the verification of key technologies for MASS. The synthetic nature of the maritime traffic scenarios generated by the S-MTGS allows for comprehensive evaluation of MASS technologies in various conditions, including challenging and extreme situations. In this discussion, we delve into the implications of the S-MTGS and explore its advantages and limitations.
The integration of a maritime traffic GAP and GRP within the S-MTGS is a noteworthy feature. This dual-generator approach enables the creation of scenarios that mimic real-world interactions between virtual ships, enhancing the authenticity of the verification process. The utilization of historical maritime data further contributes to the realism of the generated scenarios. This integration ensures that MASS technologies undergo thorough testing under diverse conditions, addressing the need for reliability in both standard and extreme maritime situations. One of the strengths of the S-MTGS lies in its ability to facilitate the generation of diverse scenarios effortlessly. Traditional methods often require individual setup for each specific scenario, such as head-on encounters. With the S-MTGS, scenarios can be generated randomly or based on a normal distribution, streamlining the process and allowing for a more comprehensive assessment of MASS technologies. This efficiency is crucial in accelerating the development and deployment of autonomous maritime navigation systems. Furthermore, the dynamic adaptation of scenarios to the ship’s position is a key advantage offered by the S-MTGS. In complex situations involving waypoints, the system ensures that secondary scenario ships can be generated even if a MASS deviates from its planned route due to collision avoidance maneuvers. This dynamic feature enables effective testing and evaluation of MASS performance under realistic conditions, surpassing the limitations of traditional methods restricted to scenarios crafted around the ship’s planned route.
However, it is crucial to acknowledge the limitations of the current study, which include three key aspects. First, the uniformity in collision avoidance patterns exhibited by all virtual ships due to using a single collision avoidance algorithm represents a significant constraint. This uniform approach does not fully capture the diverse range of collision risks and behavioral patterns of noncompliant virtual ships found in real-world maritime scenarios. Therefore, future studies should focus on diversifying collision avoidance patterns in order to enhance the reliability of performance verification. Second, as the system proposed in this paper is aimed at evaluating other systems, it poses a unique challenge when assessing its own reliability. The complexity of evaluating a system designed to assess others is a critical task that has not been extensively analyzed in our current research. Recognizing this as a limitation, we intend to undertake a thorough reliability assessment in our future research endeavors. This analysis will be vital to ensure the effectiveness and accuracy of our system in evaluating other systems, thereby significantly enhancing the robustness and applicability of our findings. Third, the proposed system aims to evaluate other systems by creating virtual ships using stored historical maritime traffic data or encounter situations with the own ship. In principle, providing a real-life traffic situation simulation environment is not considered. To provide a real-life traffic situation simulation environment, the geographical size of the maritime traffic environment to be reproduced and the number of ships within it must be considered, and computing power requirements must be determined accordingly. To implement this, there are techniques that can preferentially process ships within the field of view, techniques to process only moving ship data, etc. For future study, there is a need to further develop the proposed system using these techniques.
7. Conclusions
In conclusion, this study addresses the ongoing verification of key technologies in Maritime Autonomous Surface Ships (MASS), emphasizing the development of a Synthetic Maritime Traffic Generation System (S-MTGS). This system, comprising a maritime traffic generator and a collision avoidance algorithm, stands as a robust solution for assessing MASS performance in both hazardous and routine scenarios.
The maritime traffic generator, incorporating both absolute and relative position-based generators, utilizes historical data to craft scenarios or generate virtual ships based on diverse encounter situations. Notably, virtual ships can engage in collision avoidance maneuvers using the integrated algorithm, ensuring a comprehensive evaluation of MASS technologies. The capacity of S-MTGS to generate diverse maritime traffic scenarios aligns with the varied objectives of verifying MASS technologies, thereby contributing to heightened reliability and optimized performance in a secure operational context. Key advantages include the streamlined creation of diverse scenarios under consistent conditions, which differentiates it from traditional methods requiring individual setups for each case. Additionally, the system’s adaptability allows it to dynamically create scenarios based on the ship’s position for enhanced testing effectiveness, particularly in situations involving deviations from the planned route due to collision avoidance.
However, an identified limitation is the uniformity of collision avoidance patterns among virtual ships, which typically employ a single algorithm. Addressing this issue, future research should aim to diversify these patterns by including a variety of collision risks and behavioral patterns. Such diversification is key to enhancing the reliability of performance verification and ensuring compliance with international maritime regulations. Furthermore, it is crucial to explore whether the potential for simultaneous collision avoidance maneuvers could inadvertently elevate the risk of accidents, especially in the context of evaluating the efficacy of different systems.
In essence, the S-MTGS emerges as a significant contribution to the verification landscape of MASS technologies that can help to foster advancements in maritime safety and technology. Its ongoing refinement, coupled with the incorporation of diversified collision avoidance patterns, positions the system as a pivotal player in shaping the rigorous standards governing autonomous maritime operations.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









