

Prediction of Water Content in Subgrade Soil in Road Construction Using Hyperspectral Information Obtained through UAV


Abstract
:1. Introduction
2. Principal of Conversion of Hyperspectral Information for Water Content Prediction
3. Database of Water Content and Hyperspectral Information
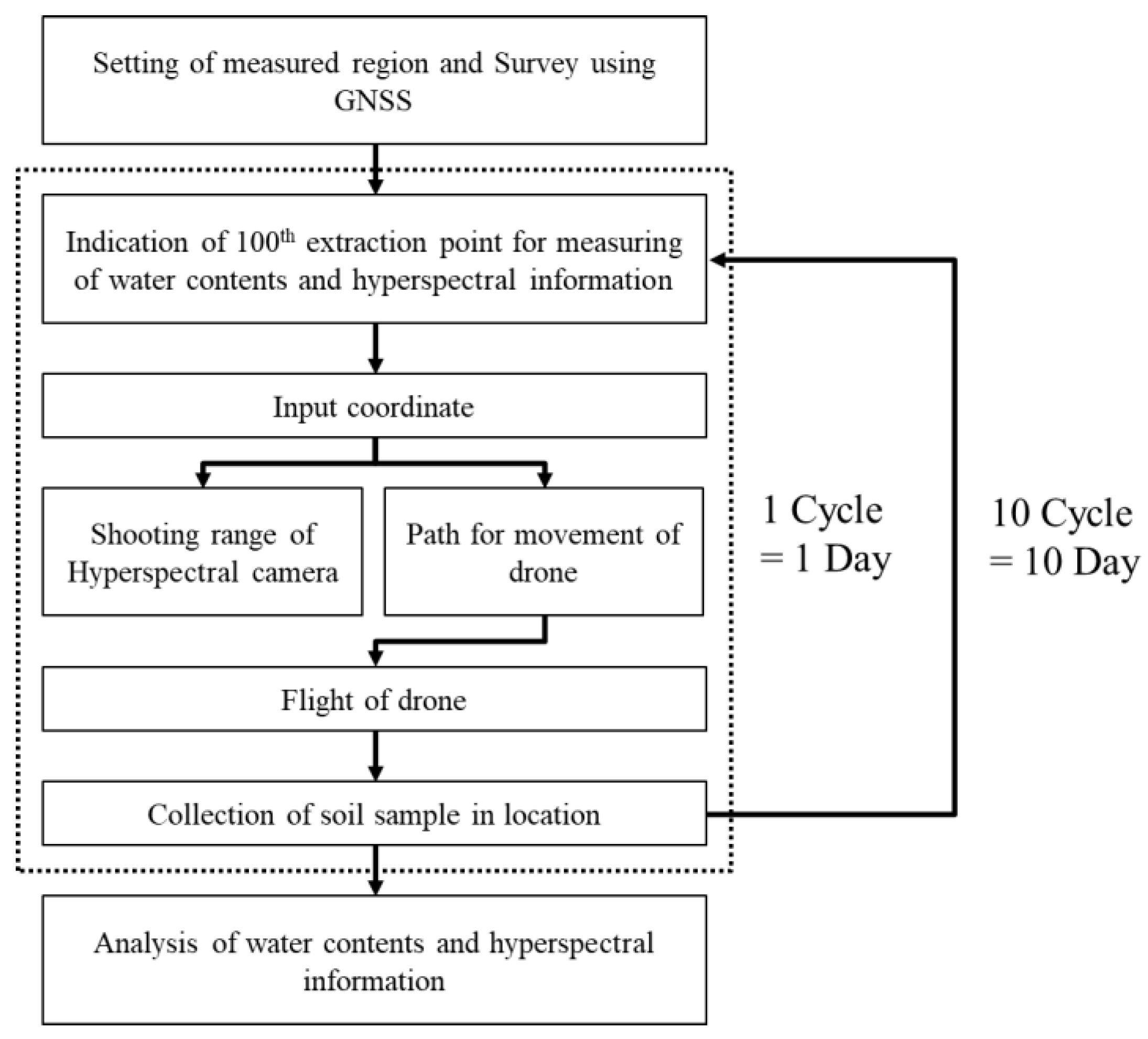
3.1. Data Acquisition Method
3.1.1. Determination of Area and GNSS Surveying
3.1.2. Indication of Extraction Point for Water Content and Hyperspectral Information
3.1.3. Input Coordinates to Set Shooting Range of Hyperspectral Camera and Drone Path
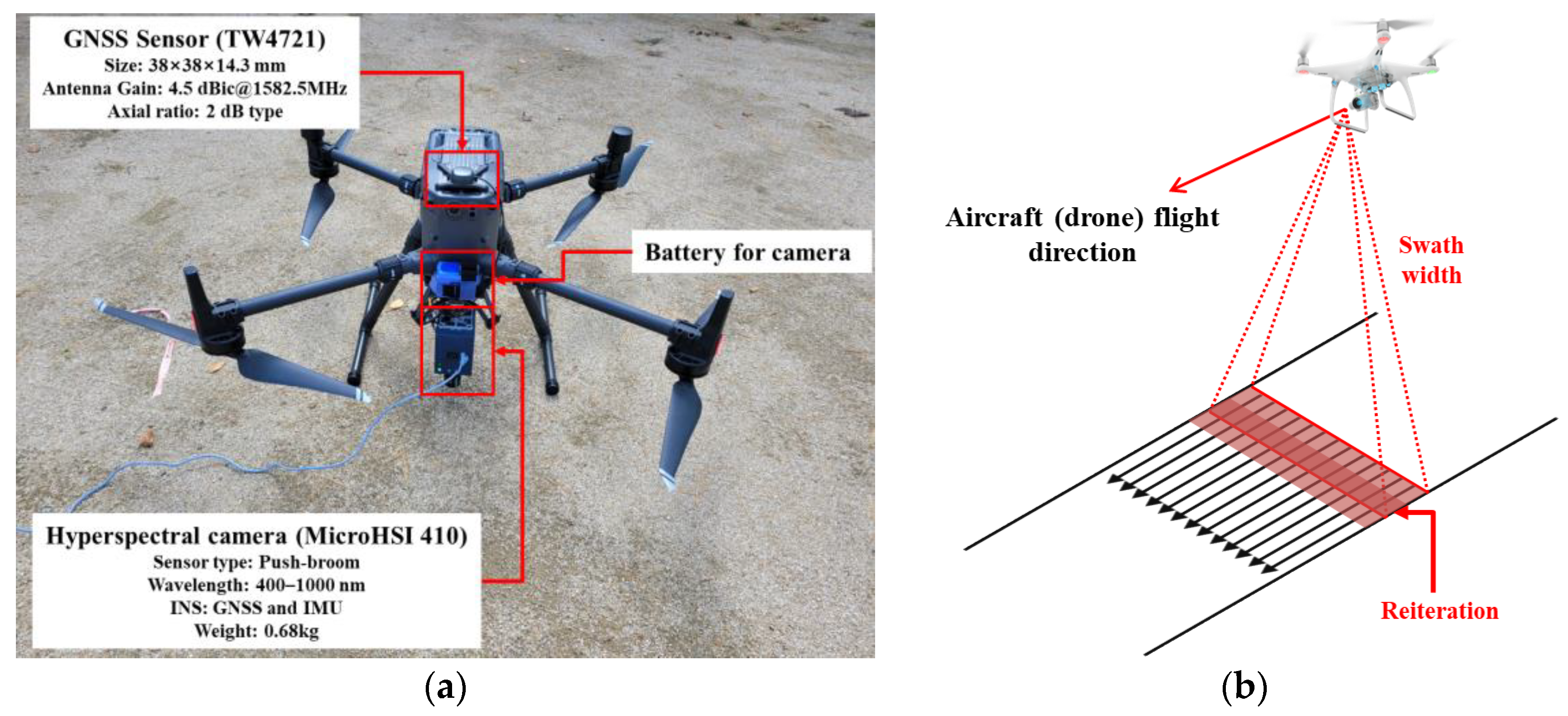
3.1.4. Equipment of Drone Flight

3.1.5. Drone Flight and Sampling of Soil
3.2. Analysis of Measured Water Content
3.2.1. Oven-Drying
3.2.2. Results of Measured Water Contents
3.3. Analysis of Hyperspectral Information
3.3.1. Geometric Correction
3.3.2. Atmospheric Correction through White and Black References
3.3.3. Extraction of Hyperspectral Information
3.4. Comparison of Measured Water Content and Hyperspectral Information
4. Machine Learning for Predicted Water Contents
4.1. Machine Learning
4.2. Methods
4.3. Comparison of Measured and Predicted Water Contents through Machine Learning
5. Development and Utilization of the CCM (Color-Coded Map)
5.1. Development Method of the CCM
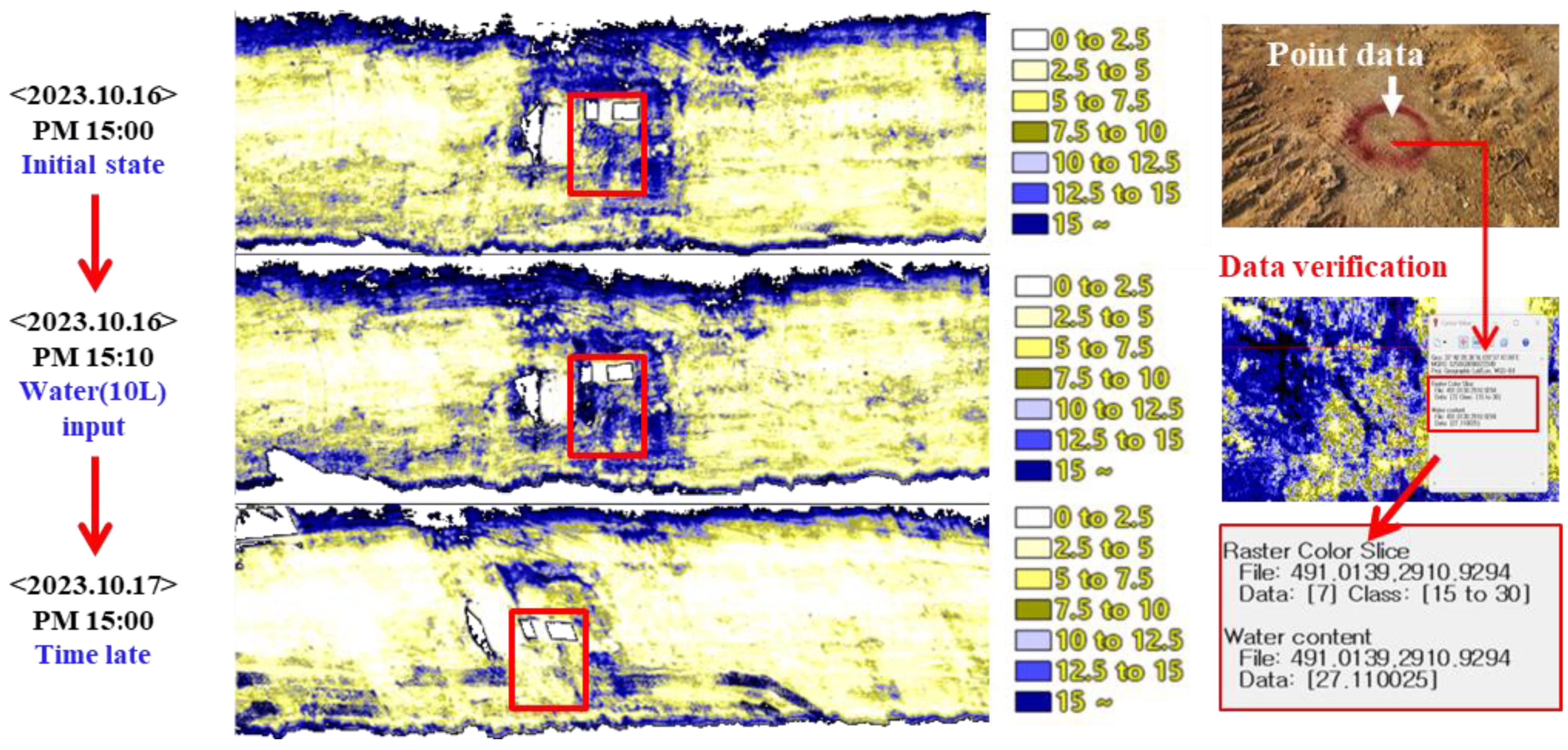
5.2. Utilization Method of the CCM
6. Discussion
- In the process of acquiring hyperspectral information using a drone, data must be secured by flying the same route at least twice, as when using the push-broom method, distortion occurs in the shot due to the influence of wind, among other things. Moreover, hyperspectral cameras and drones that receive coordinates may have differences in coordinate reading depending on the surrounding Internet environment. Since the measured hyperspectral information has a constant value regardless of this, there is no problem with the final CCM, but it is recommended to simply select a visually clear image to produce the CCM.
- The surface and inside water content require a high function ratio range and a precise data acquisition environment. The current measured data have the disadvantage of lacking information on the high water-content section (above 10%) because the research was conducted in the summer (6–8 months). Accordingly, it is necessary to secure data on high water content by artificially creating a high-water content section or by taking pictures immediately after rain. In addition, there were 100 actual water data points acquired during one drone flight, and given that it takes approximately 1 to 1.5 h, there is a possibility that an instantaneous change of water content may occur. In future research, we believe it will be necessary to immediately measure the water content, and the number of measurements should be reduced from the existing 100 times to 10–20 times.
- There is a need to supplement machine learning with additional and precisely measured water content data. The current development equation is being developed as MLR based on the extraction of 10 independent variables, and information on the number of variables extracted is omitted from this study. In future research, it is necessary to analyze reliability according to the number of independent variables extracted and consider various models such as polynomial regression in addition to MLR. In addition, we have determined that reliability analysis will need to be undertaken from various perspectives, rather than simply R2.
- This study aims to improve water-content measurement methods for quality control during subgrade compaction performed during road construction. Therefore, the CCM of water content must be delivered to the operator as quickly as possible. At the current level of technology, it is impossible to capture images with a drone and create a CCM at the same time. For CCM production, CCM follow-up processing is performed on a separate PC or laptop after the drone’s flight is completed and it has landed. Including various corrections, the time varies depending on the computer’s specifications and processing capacity according to the shooting area, but it takes about 10 to 15 min to create a CCM based on an extension of 150 m and a width of 40 m. This has the advantages of being able to simultaneously measure a wide range of water contents and a dramatically shorter speed compared to the 24 h oven-drying method, which is the existing water-content measurement method. This technology is expected to increase the level of quality control when actually introduced.
- Currently, there are no standards and prices for measuring water content at road construction sites, so the priority should be to prove the reliability of the technology and present various business models to expand and distribute the technology. Reliability can be proven by securing an R2 of more than 95% with a machine learning application model, increasing conversion speed, and manual production. At this time, a CCM can be converted and provided in various ways to suit the consumer’s position. In this study, this was presented in the form of changes in water content over time, the division of water content by specific sections, division based on optimal water content, and the notation of dust scattering.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, X.; Dong, X.; Zhang, Z.; Zhang, J.; Ma, G.; Yang, X. Compaction quality evaluation of subgrade based on soil characteristics assessment using machine learning. Transp. Geotech. 2022, 32, 100703. [Google Scholar] [CrossRef]
- Zeng, S.; Li, Z.C.; Li, W.; Li, J. Subgrade failure division and influence factors analyze of expressway. Appl. Mech. Mater. 2013, 256, 1737–1741. [Google Scholar] [CrossRef]
- Peng, W.; Lu, Y.; Xie, X.; Ren, T.; Horton, R. An improved thermo-TDR technique for monitoring soil thermal properties, water content, bulk density, and porosity. Vadose Zone J. 2019, 18, 1–9. [Google Scholar] [CrossRef]
- Ercoli, M.; Di Matteo, L.; Pauselli, C.; Mancinelli, P.; Frapiccini, S.; Talegalli, L.; Cannata, A. Integrated GPR and laboratory water content measures of sandy soils: From laboratory to field scale. Constr. Build. Mater. 2018, 159, 734–744. [Google Scholar] [CrossRef]
- Yang, B.; Wang, S.; Li, S.; Zhou, B.; Zhao, F.; Ali, F.; He, H. Research and application of UAV-based hyperspectral remote sensing for smart city construction. Cogn. Robot. 2022, 2, 255–266. [Google Scholar] [CrossRef]
- Stoeckeler, E.G. Use of aerial color photography for pavement evaluation studies. Highw. Res. Rec. 1970, 319, 40–57. [Google Scholar]
- Clark, R.N. Spectroscopy of Rocks and Minerals and Principles of Spectroscopy; John Wiley and Sons: New York, NY, USA, 1999; pp. 3–58. [Google Scholar]
- Brecher, A.; Noronha, V.; Herold, M. UAV2003: A roadmap for deploying unmanned aerial vehicle (UAVs) in transportation. In Proceedings of the Specialist Workshop, Santa Barbara, CA, USA, 2 December 2003. [Google Scholar]
- Herold, M.; Robert, D.; Smadi, O.; Noronha, V. Road condition mapping with hyperspectral remote sensing. In Proceedings of the 2004 AVIRIS Workshop, Pasadena, CA, USA, 31 March–2 April 2004. [Google Scholar]
- Özdemir, O.B.; Soydan, H.; Yardımcı Çetin, Y.; Düzgün, H.Ş. Neural network based pavement condition assessment with hyperspectral images. Remote Sens. 2020, 12, 3931. [Google Scholar] [CrossRef]
- Wang, Z.; Tian, S. Ground object information extraction from hyperspectral remote sensing images using deep learning algorithm. Microprocess. Microsyst. 2021, 87, 104394. [Google Scholar] [CrossRef]
- Bassani, C.; Cavalli, R.M.; Cavalcante, F.; Cuomo, V.; Palombo, A.; Pascuucci, S.; Pignatti, S. Deterioration status of asbestos-cement roofing sheets assessed by analyzing hyperspectral data, Remote Sens. Environ. 2007, 109, 361–378. [Google Scholar]
- Smith, M.; Ollinger, S.V.; Martin, M.E.; Aber, J.D.; Hallett, R.A.; Goodale, G.L. Direct estimation of aboveground forest prodectivity through hyperspectral remote sensing of canopy nitrogen. Ecol. Appl. 2002, 12, 1286–1302. [Google Scholar] [CrossRef]
- Kokaly, R.F.; Asner, G.P.; Ollinger, S.V.; Martin, M.E.; Wessman, C.A. Characterizing canopy biochemistry from imaging spectroscopy and its application to ecosystem studies. Remote Sens. Environ. 2009, 113, S78–S91. [Google Scholar] [CrossRef]
- Kovar, M.; Brestic, M.; Sytar, O.; Barek, V.; Hauptvogel, P.; Zivcak, M. Evaluation of hyperspectral reflectance parameters to assess the leaf water content in soybean. Water 2019, 11, 443. [Google Scholar] [CrossRef]
- Zhang, F.; Zhou, G. Estimation of vegetation water content using hyperspectral vegetation indices: A comparison of crop water indicators in response to water stress treatments for summer maize. BMC Ecol. 2019, 19, 18. [Google Scholar] [CrossRef]
- Whiting, M.L.; Li, L.; Ustin, S.L. Predicting water content using Gaussian model on soil spectra. Remote Sens. Environ. 2004, 89, 535–552. [Google Scholar] [CrossRef]
- Ge, X.; Wang, J.; Ding, J.; Cao, X.; Zhang, Z.; Liu, J.; Li, X. Combining UAV-based hyperspectral imagery and machine learning algorithms for soil moisture content monitoring. PeerJ 2019, 7, e6926. [Google Scholar] [CrossRef]
- Yuan, J.; Wang, X.; Yan, C.X.; Wang, S.R.; Ju, X.P.; Li, Y. Soil moisture retrieval model for remote sensing using reflected hyperspectral information. Remote Sens. 2019, 11, 366. [Google Scholar] [CrossRef]
- Wu, T.; Yu, J.; Lu, J.; Zou, X.; Zhang, W. Research on inversion model of cultivated soil moisture content based on hyperspectral imaging analysis. Agriculture 2020, 10, 292. [Google Scholar] [CrossRef]
- Lee, K.; Park, J.J.; Hong, G. Prediction of Ground Water Content Using Hyperspectral Information through Laboratory Test. Sustainability 2022, 14, 10999. [Google Scholar] [CrossRef]
- Lee, K.; Kim, K.S.; Park, J.; Hong, G. Spectrum Index for Estimating Ground Water Content Using Hyperspectral Information. Sustainability 2022, 14, 14318. [Google Scholar] [CrossRef]
- Gray Scale Calibration. Available online: https://www.group8tech.com/gray-scale-calibration (accessed on 1 December 2023).
- Tian, J.; Philpot, W. Spectral transmittance of a translucent sand sample with directional illumination. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4307–4317. [Google Scholar] [CrossRef]
- Lu, G.; Fei, B. Medical hyperspectral imaging: A review. J. Biomed. Opt. 2014, 19, 010901. [Google Scholar] [CrossRef] [PubMed]
- Habib, A.; Zhou, T.; Masjedi, A.; Zhang, Z.; Flatt, J.E.; Crawford, M. Boresight calibration of GNSS/INS-assisted push-broom hyperspectral scanners on UAV platforms. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 1734–1749. [Google Scholar] [CrossRef]
- Horstrand, P.; Díaz, M.; Guerra, R.; López, S.; López, J.F. A novel hyperspectral anomaly detection algorithm for real-time applications with push-broom sensors. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 4787–4797. [Google Scholar] [CrossRef]
- Angel, Y.; Turner, D.; Parkes, S.; Malbeteau, Y.; Lucieer, A.; McCabe, M.F. Automated georectification and mosaicking of UAV-based hyperspectral imagery from push-broom sensors. Remote Sens. 2020, 12, 34. [Google Scholar] [CrossRef]
- Jurado, J.M.; Pádua, L.; Hruška, J.; Feito, F.R.; Sousa, J.J. An Efficient Method for Generating UAV-Based Hyperspectral Mosaics Using Push-Broom Sensors. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 6515–6531. [Google Scholar]
- Yi, L.; Chen, J.M.; Zhang, G.; Xu, X.; Ming, X.; Guo, W. Seamless Mosaicking of UAV-Based Push-Broom Hyperspectral Images for Environment Monitoring. Remote Sens. 2021, 13, 4720. [Google Scholar] [CrossRef]
- Ortega, S.; Guerra, R.; Diaz, M.; Fabelo, H.; López, S.; Callico, G.M.; Sarmiento, R. Hyperspectral push-broom microscope development and characterization. IEEE Access 2019, 7, 122473–122491. [Google Scholar] [CrossRef]
- Eismann, M.T.; Stocker, A.D.; Nasrabadi, N.M. Automated hyperspectral cueing for civilian search and rescue. Proc. IEEE 2009, 97, 1031–1055. [Google Scholar] [CrossRef]
- ASTM D1556; Standard Test Method for Density and Unit Weight of Soil in Place by Sand-Cone Method. American Society for Testing of Materials: West Conshohocken, PA, USA, 2015.
- ASTM D2216; Standard Test Methods for Laboratory Determination of Water (Moisture) Content of Soil and Rock by Mass. American Society for Testing of Materials: West Conshohocken, PA, USA, 2019.
- ASTM D4643; Standard Test Method for Determination of Water Content of Soil and Rock by Microwave Oven Heating. American Society for Testing of Materials: West Conshohocken, PA, USA, 2017.
- ASTM D4944; Standard Test Method for Field Determination of Water (Moisture) Content of Soil by the Calcium Carbide Gas Pressure Tester. American Society for Testing of Materials: West Conshohocken, PA, USA, 2018.
- Abdulazeez, A.; Salim, B.; Zeebaree, D.; Doghramachi, D. Comparison of VPN Protocols at Network Layer Focusing on Wire Guard Protocol. iJIM 2020, 14, 157–177. [Google Scholar] [CrossRef]
- Maulud, D.; Abdulazeez, A.M. A review on linear regression comprehensive in machine learning. J. Appl. Sci. Technol. Trends 2020, 1, 140–147. [Google Scholar] [CrossRef]
- Sarkar, M.R.; Rabbani, M.G.; Khan, A.R.; Hossain, M.M. Electricity demand forecasting of Rajshahi City in Bangladesh using fuzzy linear regression model. In Proceedings of the 2015 International Conference on Electrical Engineering and Information Communication Technology (ICEEICT), Dhaka, Bangladesh, 21–23 May 2015; pp. 1–3. [Google Scholar]
- Zhang, Z.; Li, Y.; Li, L.; Li, Z.; Liu, S. Multiple linear regression for high efficiency video intra coding. In Proceedings of the ICASSP 2019—2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019; pp. 1832–1836. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Drone | Camera | GNSS Sensor | Battery |
|---|---|---|---|---|
| Model | Matrice 300 Pro | Shark microHSI 410 | TW4721 | - |
| Weight (kg) | 6.3 | 0.7 | 0.1 | 0.5 |
| Size (mm) | 810 × 670 × 430 | 90 × 70 × 200 | 25 diameter | 35 × 70 × 50 |
| Detailed description | Continuous flight is possible for at least 30 min, and a maximum load of 9 kg can be carried | Providing optimized analysis images of the near-infrared (NIR) region of the spectrum | Providing true response over its entire bandwidth, thereby producing superior multi-path signal rejection | Camera can be used for 50 h on one full charge |
| Flight Altitude (m) | Flight Attitude (m) | Velocity (m/sec) |
|---|---|---|
| 40 | 20.39 | 3.66 |
| 50 | 25.49 | 4.57 |
| 60 | 30.59 | 5.49 |
| 70 | 35.69 | 6.40 |
| 80 | 40.79 | 7.32 |
| Water Content | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| CCM (%) | 4.75 | 3.87 | 9.24 | 8.74 | 6.45 | 5.21 | 4.98 | 2.21 | 1.87 | 2.57 |
| Measuring (%) | 4.45 | 3.94 | 9.39 | 7.54 | 5.42 | 4.18 | 2.84 | 1.95 | 2.21 | 3.58 |
| R2 | 0.872 | |||||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, K.; Park, J.; Hong, G. Prediction of Water Content in Subgrade Soil in Road Construction Using Hyperspectral Information Obtained through UAV. Appl. Sci. 2024, 14, 1248. https://doi.org/10.3390/app14031248
Lee K, Park J, Hong G. Prediction of Water Content in Subgrade Soil in Road Construction Using Hyperspectral Information Obtained through UAV. Applied Sciences. 2024; 14(3):1248. https://doi.org/10.3390/app14031248
Chicago/Turabian StyleLee, Kicheol, Jeongjun Park, and Gigwon Hong. 2024. "Prediction of Water Content in Subgrade Soil in Road Construction Using Hyperspectral Information Obtained through UAV" Applied Sciences 14, no. 3: 1248. https://doi.org/10.3390/app14031248
APA StyleLee, K., Park, J., & Hong, G. (2024). Prediction of Water Content in Subgrade Soil in Road Construction Using Hyperspectral Information Obtained through UAV. Applied Sciences, 14(3), 1248. https://doi.org/10.3390/app14031248