
PSO-Based Voltage Control Strategy for Loadability Enhancement in Smart Power Grids




Abstract
:1. Introduction
2. Related Work
3. Basic Concepts of Voltage Stability
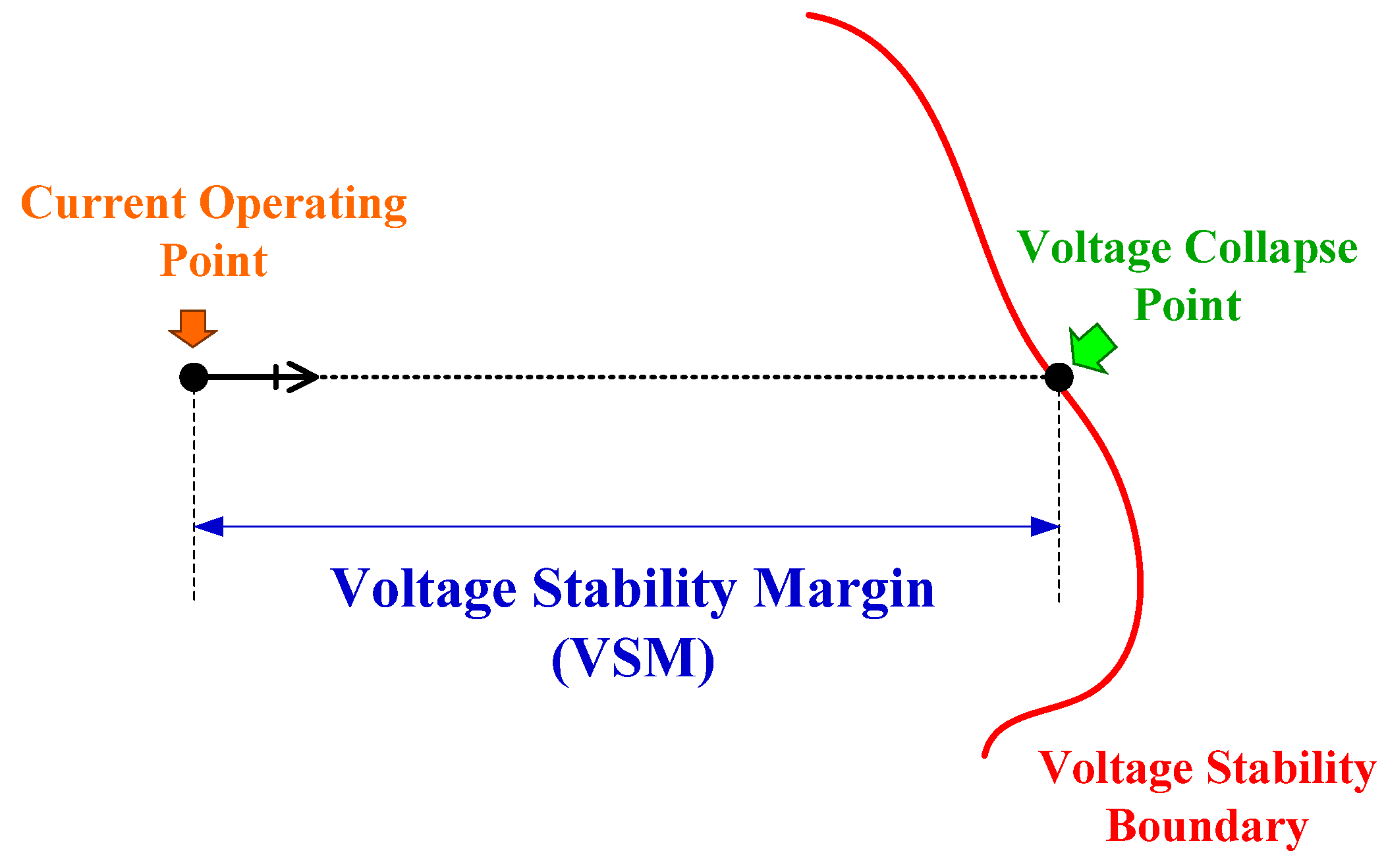
3.1. Voltage Stability Margin (VSM)
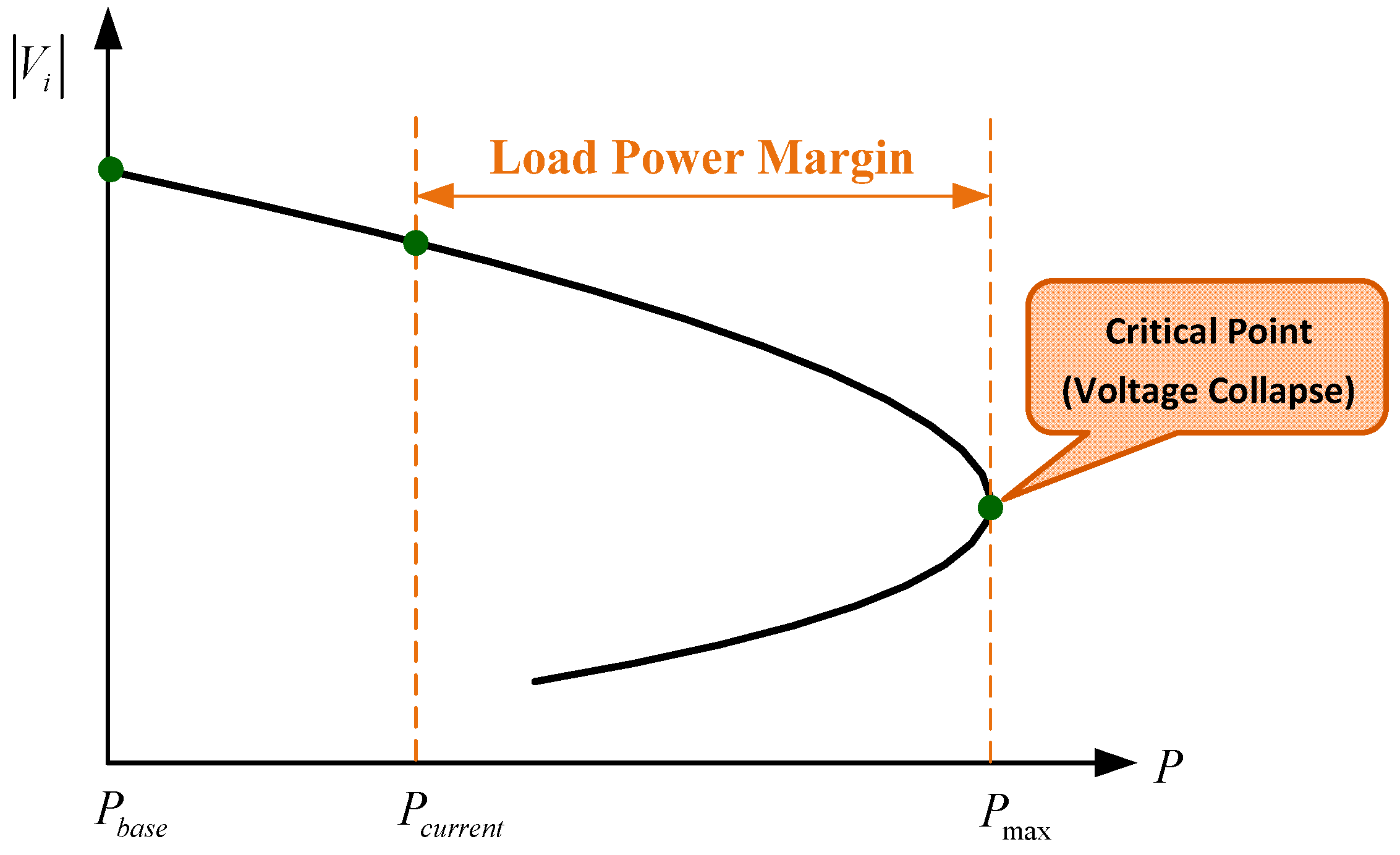
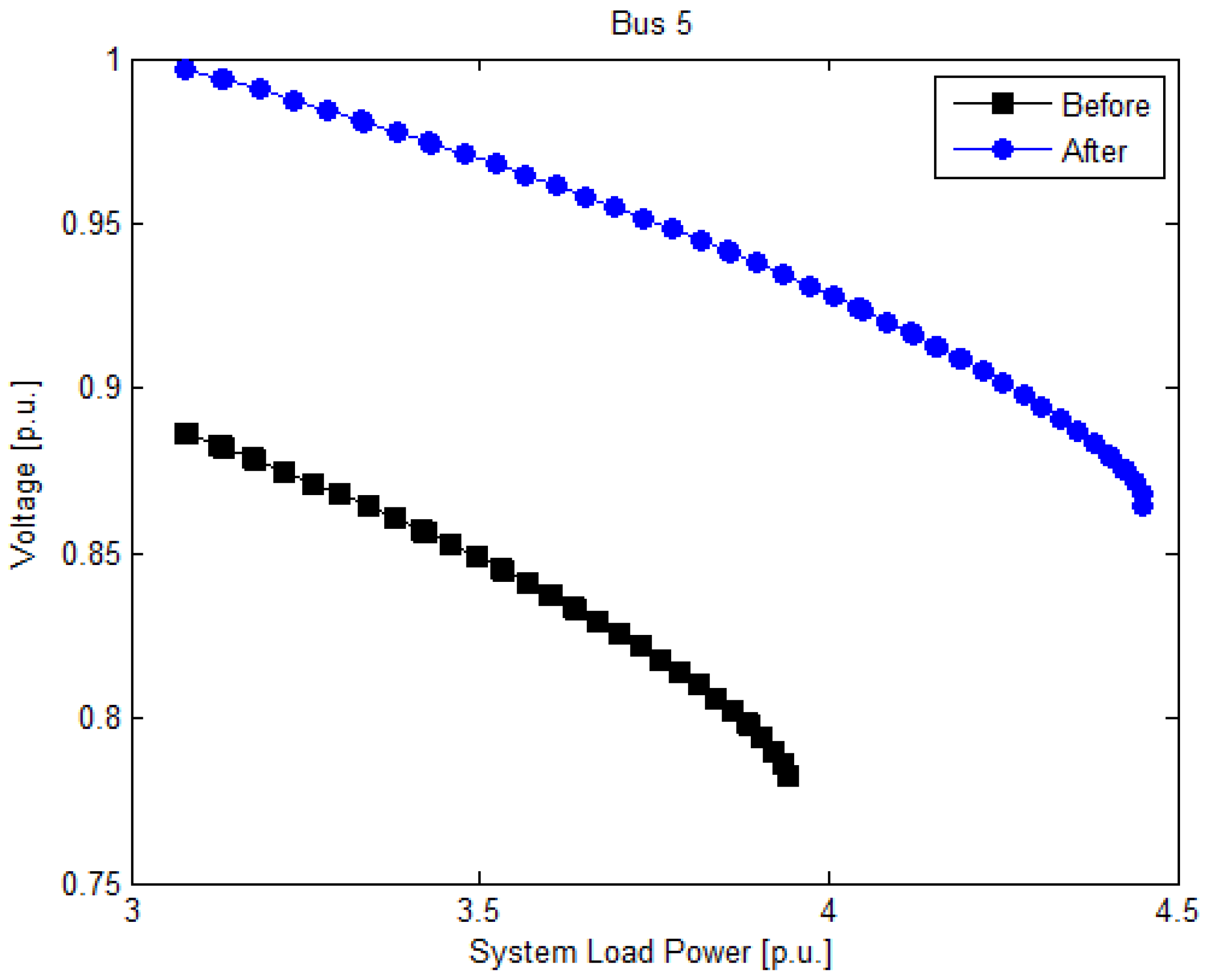
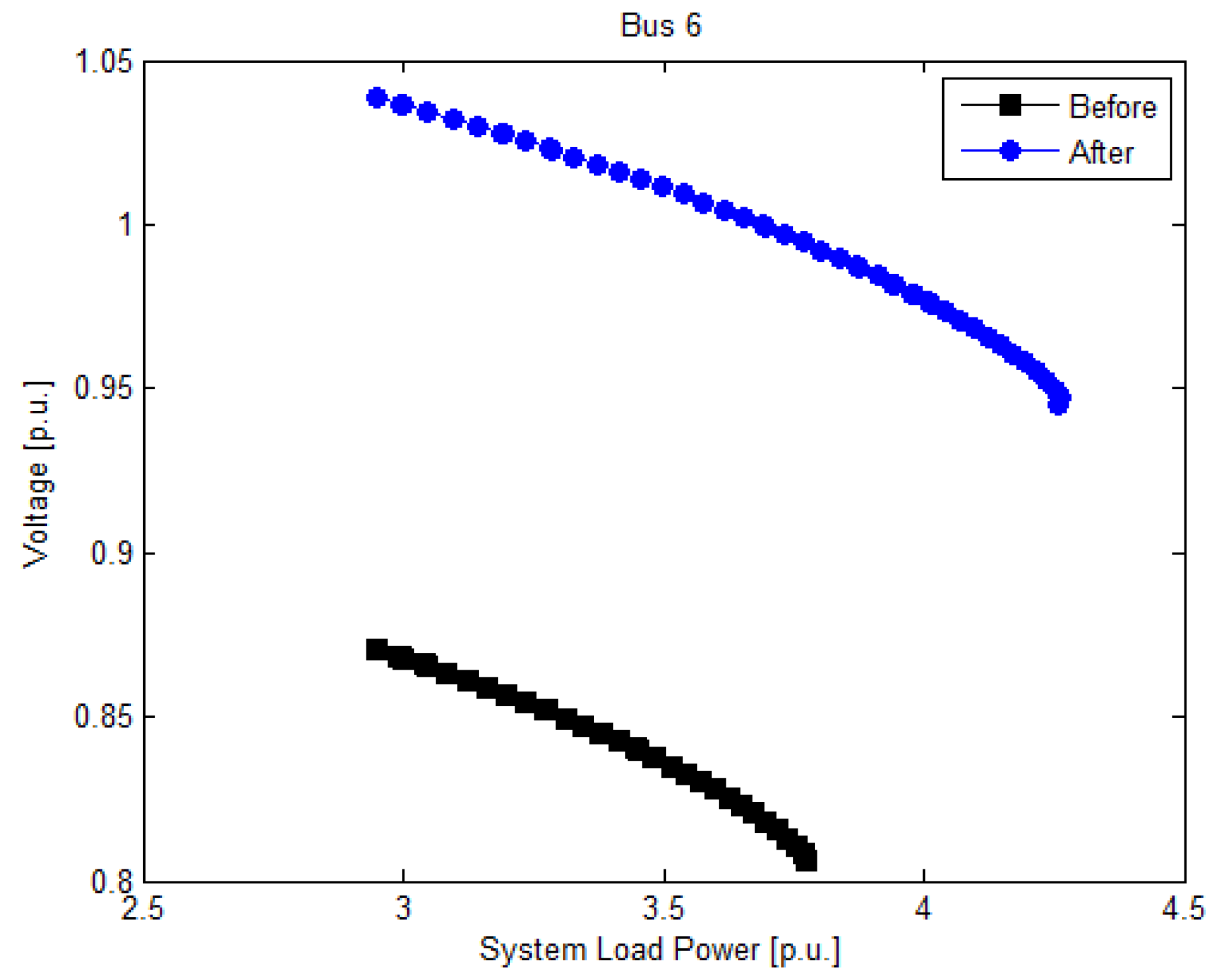
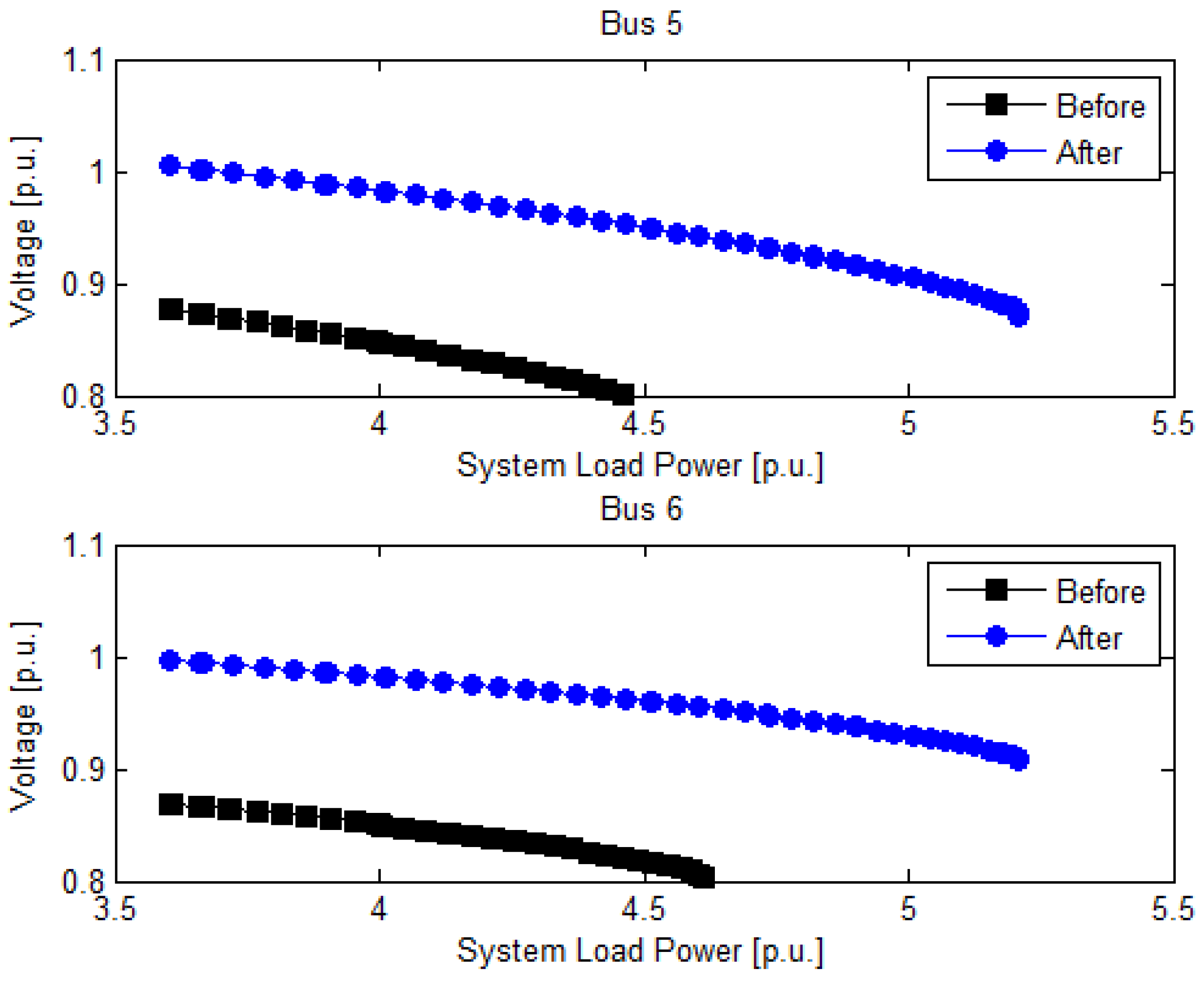
3.2. P-V Curve Analysis
4. Problem Statement
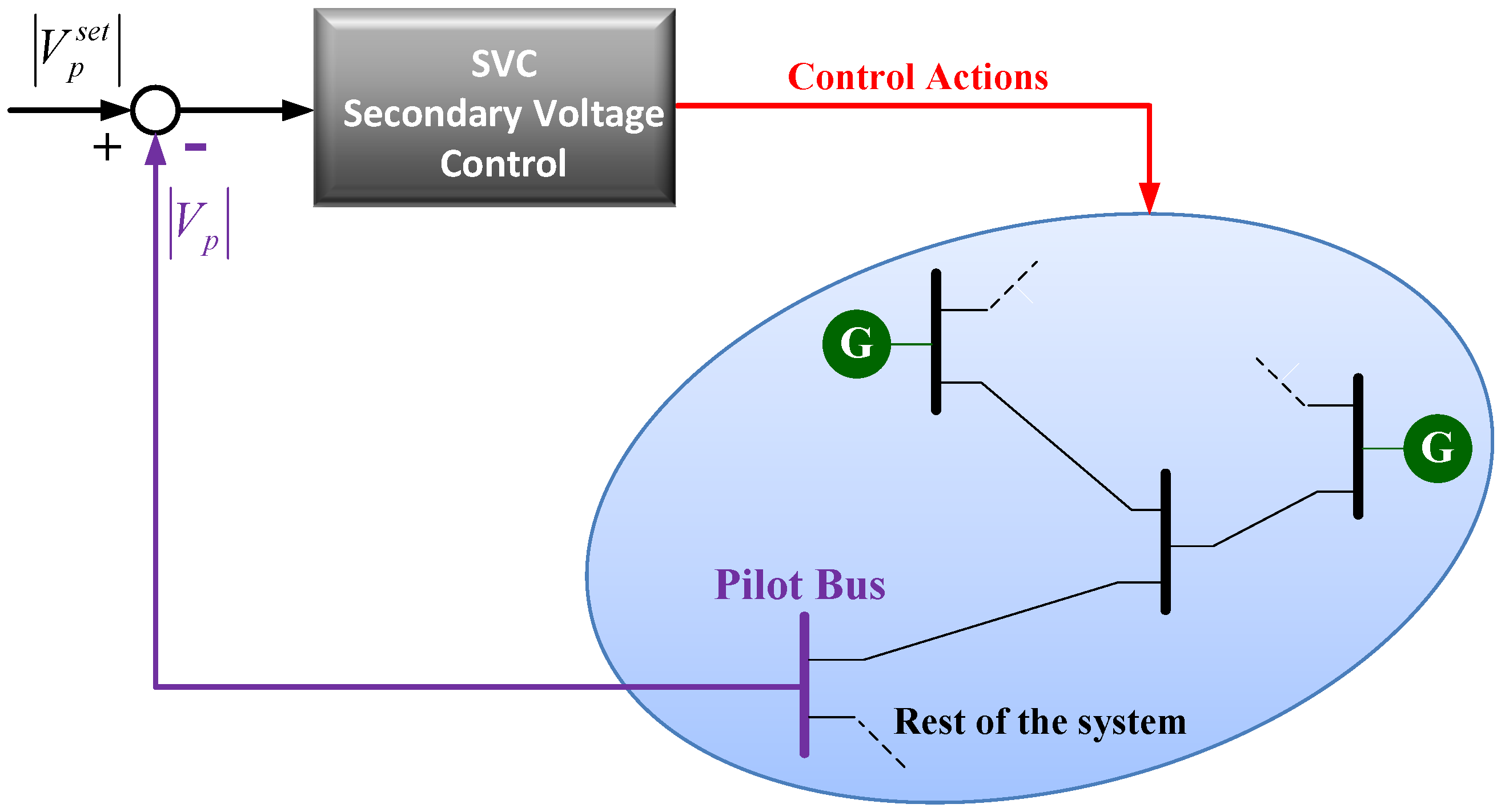
4.1. Power Grid Q-V Control
4.2. Linear Feedback Control Design
4.3. Objective Function
5. Solution Method
5.1. Particle Swarm Optimization (PSO)
5.2. Proposed Algorithm
- Step 1:
- Input branch parameters and bus data.
- Step 2:
- Input pilot-bus measured voltages.
- Step 3:
- If the measured voltages are not within the specified limits, the proposed PSO-based control algorithm will be activated automatically.
- Step 4:
- Form the matrices , , and .
- Step 5:
- PSO Initialization.
- (1)
- Set iteration counter and maximum iteration .
- (2)
- Set population size.
- (3)
- Set learning coefficients and , and in Equation (21).
- (4)
- Initialize and according to the constraints of the control variables.
- (5)
- Initialize pbest and gbest.
- Step 6:
- Update iteration counter .
- Step 7:
- For each , evaluate the objective function in Equation (17), i.e., measure the fitness value for each particle (pbest) and store the particle with the best fitness (gbest) value.
- Step 8:
- Update using Equation (20).
- Step 9:
- Update using Equation (19).
- Step 10:
- If t reaches , then go to Step 11. Otherwise, go back to Step 6.
- Step 11:
- Print out the latest gbest which is the optimal control strategy.
6. Numerical Examples and Results
- (1)
- population size = 100;
- (2)
- maximum iteration = 200;
- (3)
- learning coefficients: and ;
- (4)
- in Equation (21) is set to 0.729.
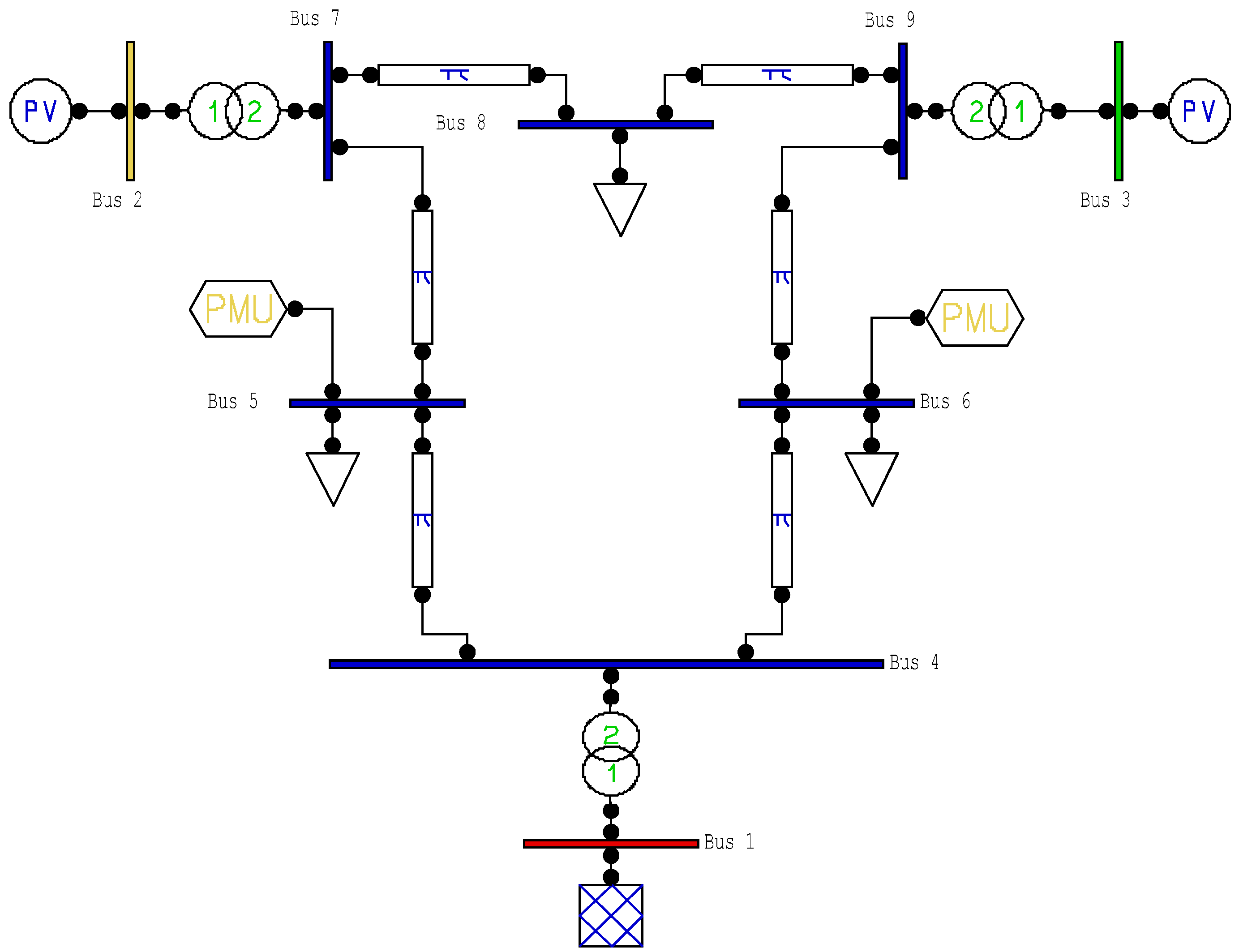
6.1. IEEE 9-Bus
- Case 1: All load bus variations and light load conditions.
- Case 2: Single load bus variation and peak load condition.
- Case 3: Several load bus variations, peak load conditions, and line outage contingencies.
Case 1
Case 2
Case 3
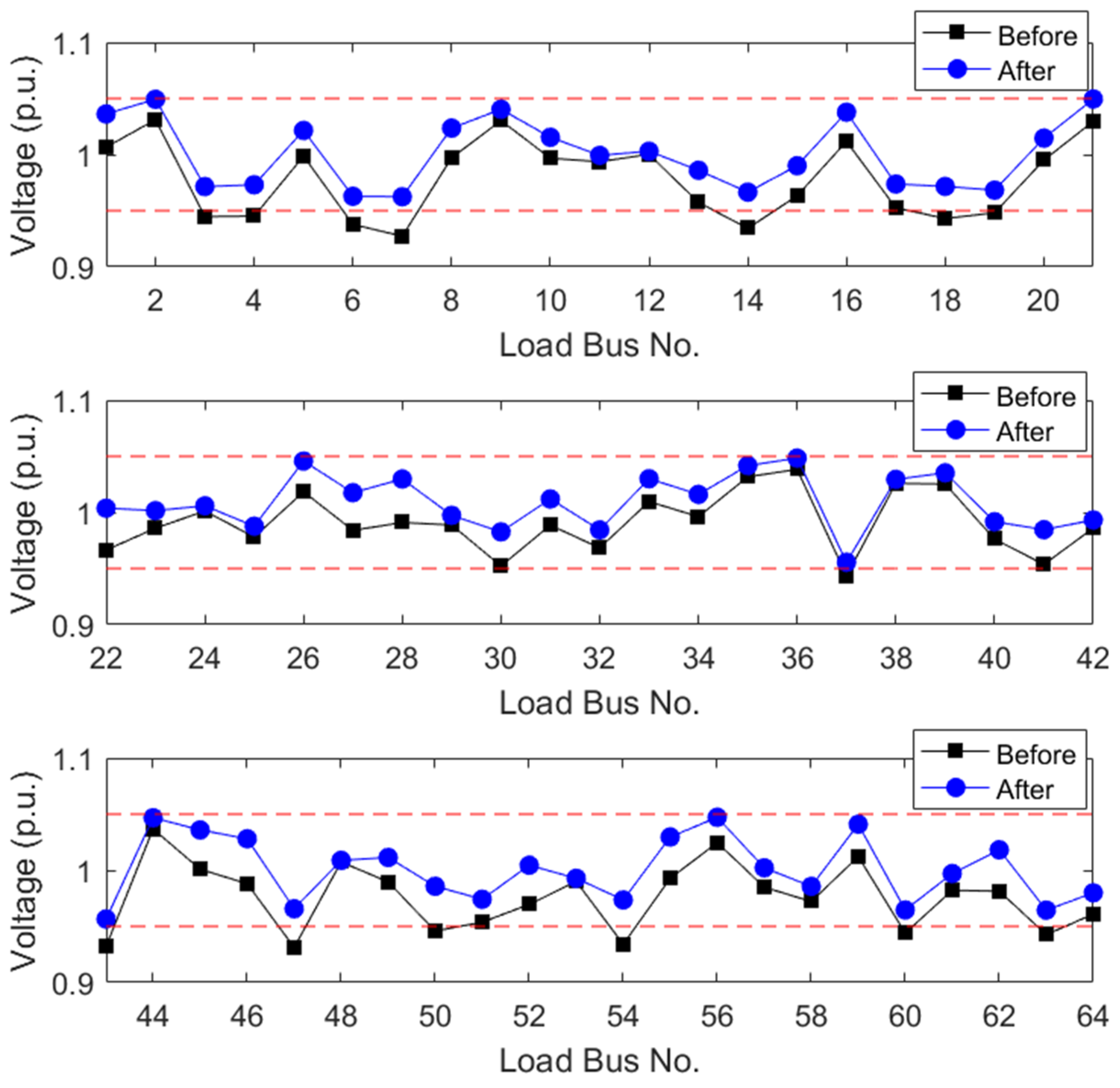
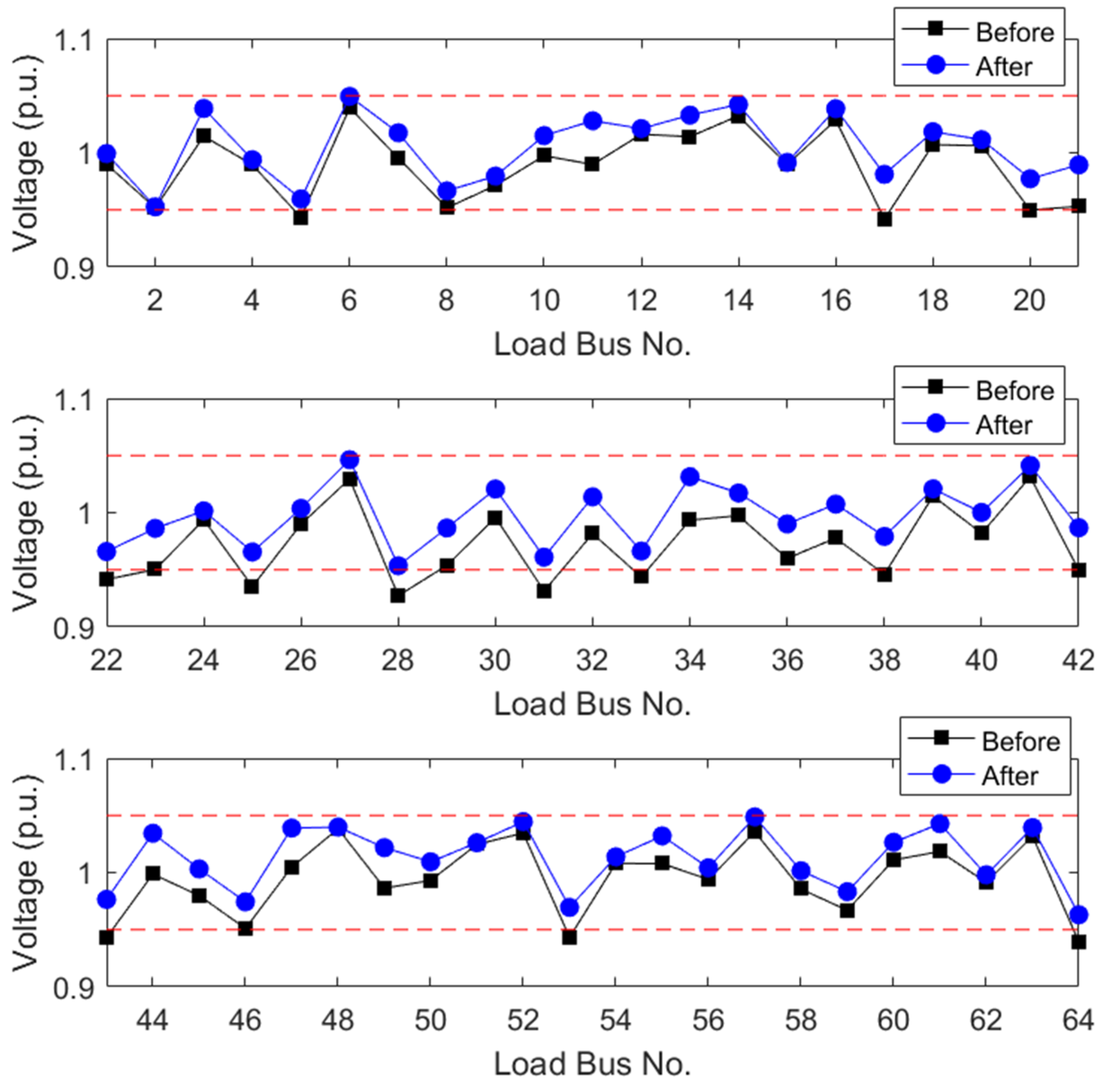
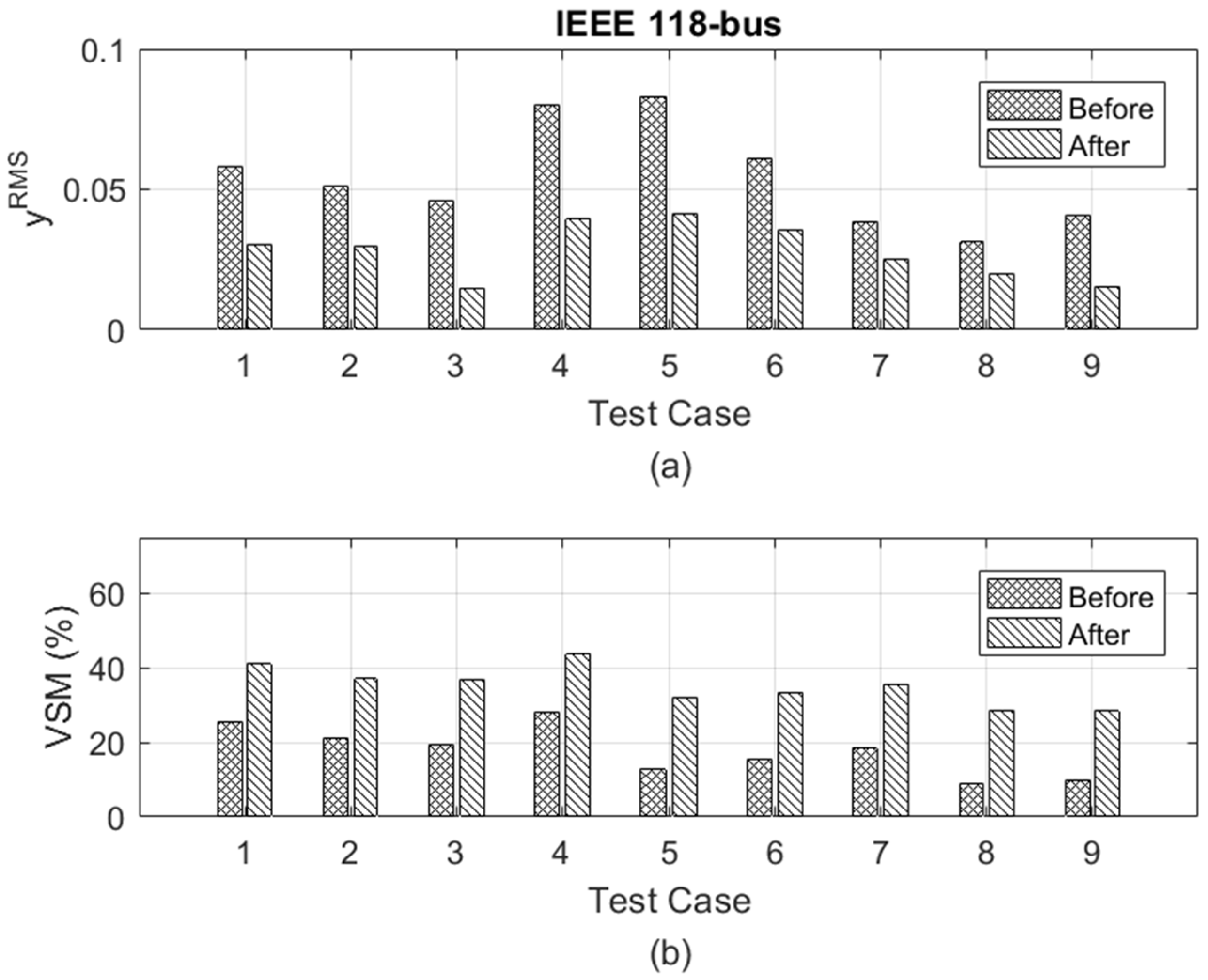
6.2. IEEE 118-Bus
- Case 1: Several load bus variations and peak load conditions.
- Case 2: All load bus variations, peak load conditions, and line outage contingencies.
6.2.1. Effects of Different Pilot-Bus Selections
6.2.2. Comparison with Worst-Case Design Based Methods
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kundur, P. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Van Cutsem, T.; Vournas, C. Voltage Stability of Electric Power Systems; Kluwer: Norwell, MA, USA, 1998. [Google Scholar]
- Ajjarapu, V. Computational Techniques for Voltage Stability Assessment and Control; Springer: New York, NY, USA, 2006. [Google Scholar]
- Kundur, P.; Paserba, J.; Ajjarapu, V.; Andersson, G.; Bose, A.; Canizares, C.; Hatziargyriou, N.; Hill, D.; Stankovic, A.; Taylor, C.; et al. Definition and classification of power system stability IEEE/CIGRE joint task force on stability terms and definitions. IEEE Trans. Power Syst. 2004, 19, 1387–1401. [Google Scholar]
- Chiang, H.D.; Flueck, A.J.; Shah, K.S.; Balu, N. CPFLOW: A practical tool for tracing power system steady-state stationary behavior due to load and generation variations. IEEE Trans. Power Syst. 1995, 10, 623–634. [Google Scholar] [CrossRef]
- Paul, J.P.; Leost, J.T.; Tesseron, J.M. Survey of the secondary voltage control in France: Present realization and investigations. IEEE Trans. Power Syst. 1987, 2, 505–511. [Google Scholar] [CrossRef]
- Corsi, S.; Marannino, P.; Losignore, N.; Moreschini, G.; Piccini, G. Coordination between the reactive power scheduling function and the hierarchical voltage control of the EHV ENEL system. IEEE Trans. Power Syst. 1995, 10, 686–694. [Google Scholar] [CrossRef]
- Vu, H.; Pruvot, P.; Launay, C.; Harmand, Y. An improved voltage control on large scale power system. IEEE Trans. Power Syst. 1996, 11, 1295–1303. [Google Scholar] [CrossRef]
- Sancha, J.L.; Fernandez, J.L.; Cortes, A.; Abarca, J.T. Secondary voltage control: Analysis, solutions, simulation results for the Spanish transmission system. IEEE Trans. Power Syst. 1996, 11, 630–638. [Google Scholar] [CrossRef]
- Corsi, S.; Pozzi, M.; Sabelli, C.; Serrani, A. The coordinated automatic voltage control of the Italian transmission grid—Part I: Reasons of the choice and overview of the consolidated hierarchical system. IEEE Trans. Power Syst. 2004, 19, 1723–1732. [Google Scholar] [CrossRef]
- Taranto, G.N.; Martins, N.; Falcao, D.M.; Martins, A.C.B.; dos Santos, M.G. Benefits of applying secondary voltage control schemes to the Brazilian system. In Proceedings of the IEEE Power Engineering Society Summer Meeting, Seattle, WA, USA, 16–20 July 2000; pp. 937–942.
- Corsi, S.; De Villiers, F.; Vajeth, R. Secondary voltage regulation applied to the South Africa transmission grid. In Proceedings of the 2010 IEEE Power and Energy Society General Meeting, Minneapolis, MN, USA, 25–29 July 2010; pp. 1–8.
- Guo, Q.; Sun, H.; Tong, J.; Zhang, M.; Wang, B.; Zhang, B. Study of system-wide automatic voltage control on PJM system. In Proceedings of the 2010 IEEE Power and Energy Society General Meeting, Minneapolis, MN, USA, 25–29 July 2010; pp. 1–6.
- Tong, J.; Souder, D.W.; Pilong, C.; Zhang, M.; Guo, Q.; Sun, H.; Zhang, B. Voltage control practices and tools used for system voltage control of PJM. In Proceedings of the IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–29 July 2011; pp. 1–5.
- Sun, H.; Guo, Q.; Zhang, B.; Wu, W.; Wang, B. An adaptive zone-division-based automatic voltage control system with applications in China. IEEE Trans. Power Syst. 2013, 28, 1816–1828. [Google Scholar] [CrossRef]
- Lagonotte, P.; Sabonnadiere, J.C.; Leost, J.Y.; Paul, J.P. Structural analysis of the electrical system: Application to the secondary voltage control in France. IEEE Trans. Power Syst. 1989, 4, 1477–1484. [Google Scholar] [CrossRef]
- Mehrjerdi, H.; Lefebvre, S.; Saad, M.; Asber, D. A decentralized control of partitioned power networks for voltage regulation and prevention against disturbance propagation. IEEE Trans. Power Syst. 2013, 28, 1461–1469. [Google Scholar] [CrossRef]
- Alimisis, V.; Taylor, P.C. Zoning evaluation for improved coordinated automatic voltage control. IEEE Trans. Power Syst. 2015, 30, 2736–2746. [Google Scholar] [CrossRef]
- Conejo, A.; Aguilar, M.J. Secondary voltage control: Nonlinear selection of pilot buses, design of an optimal control law, and simulation results. IEE Proc. Gen. Trans. Distrib. 1998, 145, 77–81. [Google Scholar] [CrossRef]
- Ilic, M.; Christensen, J.; Eichorn, K.L. Secondary voltage control using pilot point information. IEEE Trans. Power Syst. 1988, 3, 660–668. [Google Scholar] [CrossRef]
- Zobian, A.; Ilic, M.D. A steady state voltage monitoring and control algorithm using localized least square minimization of load voltage deviations. IEEE Trans. Power Syst. 1996, 11, 929–938. [Google Scholar] [CrossRef]
- Yu, C.; Yoon, Y.T.; Ilic, M.D.; Catelli, A. On-line voltage regulation: The case of New England. IEEE Trans. Power Syst. 1999, 14, 1477–1484. [Google Scholar]
- Stankovic, A.; Ilic, M.; Maratukulam, D. Recent results in secondary voltage control of power systems. IEEE Trans. Power Syst. 1991, 6, 94–101. [Google Scholar] [CrossRef]
- Thorp, J.S.; Ilic-Spong, M.; Varghese, M. An optimal secondary voltage-var control technique. Automatica 1986, 22, 217–222. [Google Scholar] [CrossRef]
- Liu, Z.; Ilic, M.D. Toward PMU-based robust automatic voltage control (AVC) and automatic flow control (AFC). In Proceedings of the 2010 IEEE Power and Energy Society General Meeting, Minneapolis, MN, USA, 25–29 July 2010; pp. 1–8.
- Su, H.Y.; Liu, C.W. An adaptive PMU-based secondary voltage control scheme. IEEE Trans. Smart Grid. 2013, 4, 1514–1522. [Google Scholar] [CrossRef]
- Su, H.Y.; Chen, Y.C.; Hsu, Y.L. A synchrophasor based optimal voltage control scheme with successive voltage stability margin improvement. Appl. Sci. 2016, 6, 1–12. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the IEEE International Conference Neural Networks (ICNN), Perth, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948.
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the 6th International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995; pp. 39–43.
- Shi, Y.; Eberhart, R. A modified particle swarm optimizer. In Proceedings of the IEEE World Congress on Computational Intelligence, Anchorage, Alaska, 4–9 May 1998; pp. 69–73.
- Panigrahi, B.; Abraham, A.; Das, S. Computational Intelligence in Power Engineering; Springer-Verlag: Berlin, Germany, 2010. [Google Scholar]
- Alrashidi, M.R.; El-Hawary, M.E. A survey of particle swarm optimization applications in electric power systems. IEEE Trans. Evol. Comput. 2009, 13, 913–918. [Google Scholar] [CrossRef]
- Chen, S.H.; Hu, W.H.; Chen, Z. Comprehensive cost minimization in distribution networks using segmented-time feeder reconfiguration and reactive power control of distributed generators. IEEE Trans. Power Syst. 2016, 31, 983–993. [Google Scholar] [CrossRef]
- Wu, W.C.; Tsai, M.S. Application of enhanced integer coded particle swarm optimization for distribution system feeder reconfiguration. IEEE Trans. Power Syst. 2011, 26, 1591–1599. [Google Scholar] [CrossRef]
- Clerc, M.; Kennedy, J. The particle swarm-explosion, stability, and convergence in a multidimensional complex space. IEEE Trans. Evol. Comput. 2002, 6, 58–73. [Google Scholar] [CrossRef]
- Eberhart, R.; Shi, Y. Comparing inertia weights and constriction factors in particle swarm optimization. In Proceedings of the 2000 IEEE Congress on Evolutionary Computation, Piscataway, NJ, USA, 16–19 July 2000; pp. 84–88.
- Power Systems Test Case Archive, University of Washington College of Engineering. Available online: http://www.ee.washington.edu/re-serach/pstcal/ (accessed on 4 March 2016).
- Milano, F. Power System Analysis Toolbox (PSAT); ver. 2.0.0; University College Dublin: Dublin, Ireland, 2008. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Case | yRMS (p.u.) | VSM (%) | ||
|---|---|---|---|---|
| Before | After | Before | After | |
| 1 | 0.0598 | 0.0337 | 27.95 | 42.43 |
| 2 | 0.0441 | 0.0304 | 10.03 | 29.86 |
| 3 | 0.0795 | 0.0401 | 9.46 | 30.08 |
| Case | Load Level 1 | Load Pattern | Load Variation | Pilot-Bus Selection |
|---|---|---|---|---|
| 1 | Single | 15% | Pilot_One 2 | |
| 2 | Single | 15% | Pilot_One 2 | |
| 3 | Single | 15% | Pilot_One 2 | |
| 4 | Several | 25% | Pilot_Even 3 | |
| 5 | Several | 25% | Pilot_Even 3 | |
| 6 | Several | 25% | Pilot_Even 3 | |
| 7 | All | 35% | Pilot_Odd 4 | |
| 8 | All | 35% | Pilot_Odd 4 | |
| 9 | All | 35% | Pilot_Odd 4 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, H.-Y.; Hsu, Y.-L.; Chen, Y.-C. PSO-Based Voltage Control Strategy for Loadability Enhancement in Smart Power Grids. Appl. Sci. 2016, 6, 449. https://doi.org/10.3390/app6120449
Su H-Y, Hsu Y-L, Chen Y-C. PSO-Based Voltage Control Strategy for Loadability Enhancement in Smart Power Grids. Applied Sciences. 2016; 6(12):449. https://doi.org/10.3390/app6120449
Chicago/Turabian StyleSu, Heng-Yi, Yu-Liang Hsu, and Yi-Chung Chen. 2016. "PSO-Based Voltage Control Strategy for Loadability Enhancement in Smart Power Grids" Applied Sciences 6, no. 12: 449. https://doi.org/10.3390/app6120449
APA StyleSu, H.-Y., Hsu, Y.-L., & Chen, Y.-C. (2016). PSO-Based Voltage Control Strategy for Loadability Enhancement in Smart Power Grids. Applied Sciences, 6(12), 449. https://doi.org/10.3390/app6120449