
Development of a High-Precision Touch-Trigger Probe Using a Single Sensor †

 ,
,  , and
, and
Abstract
:1. Introduction
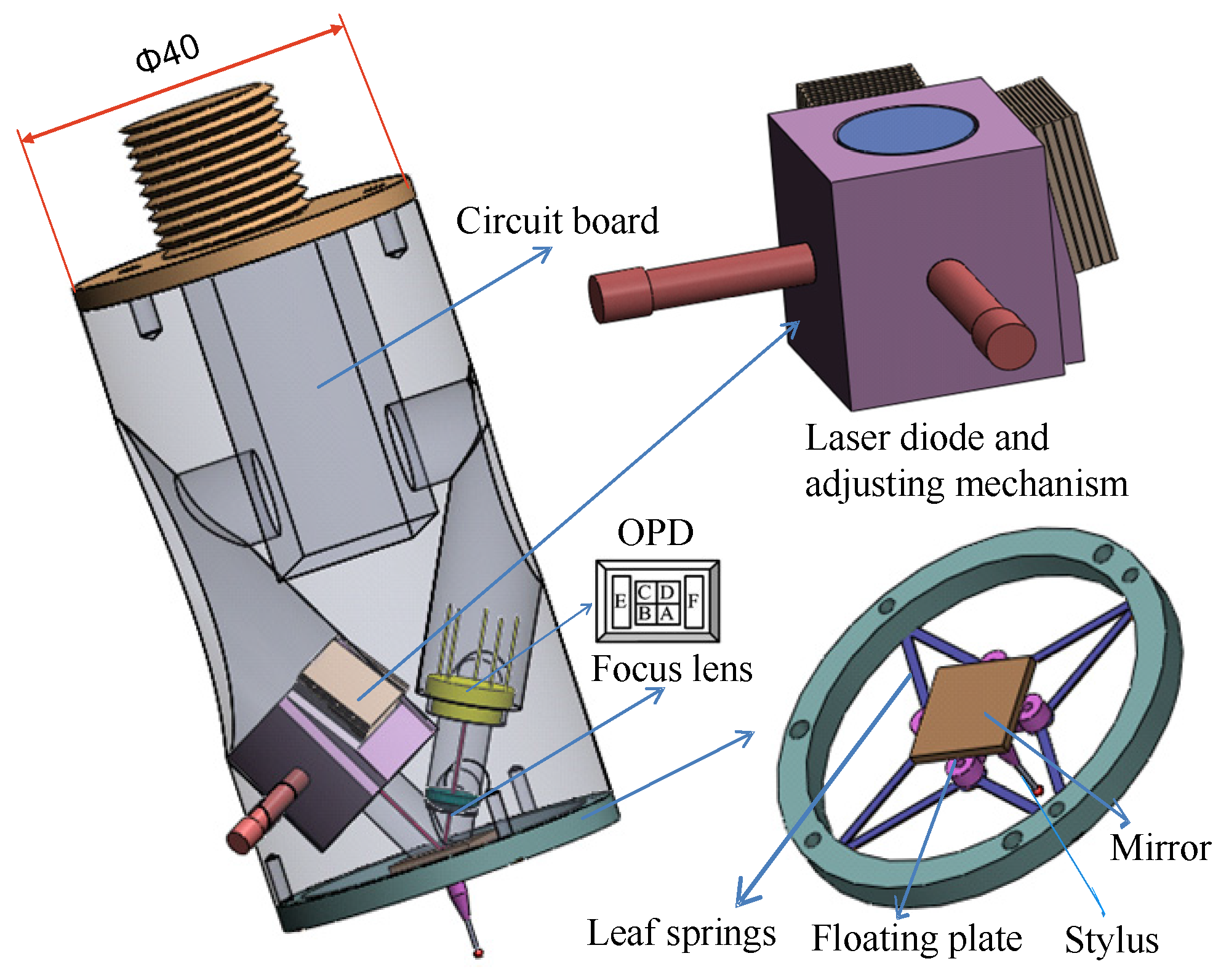
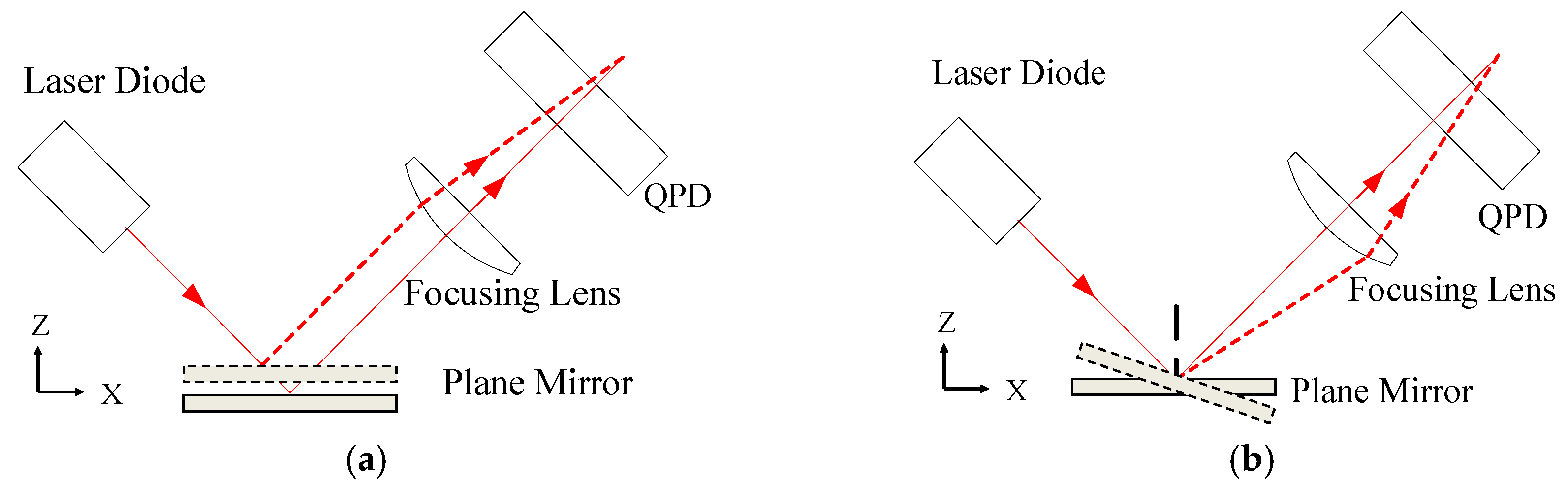
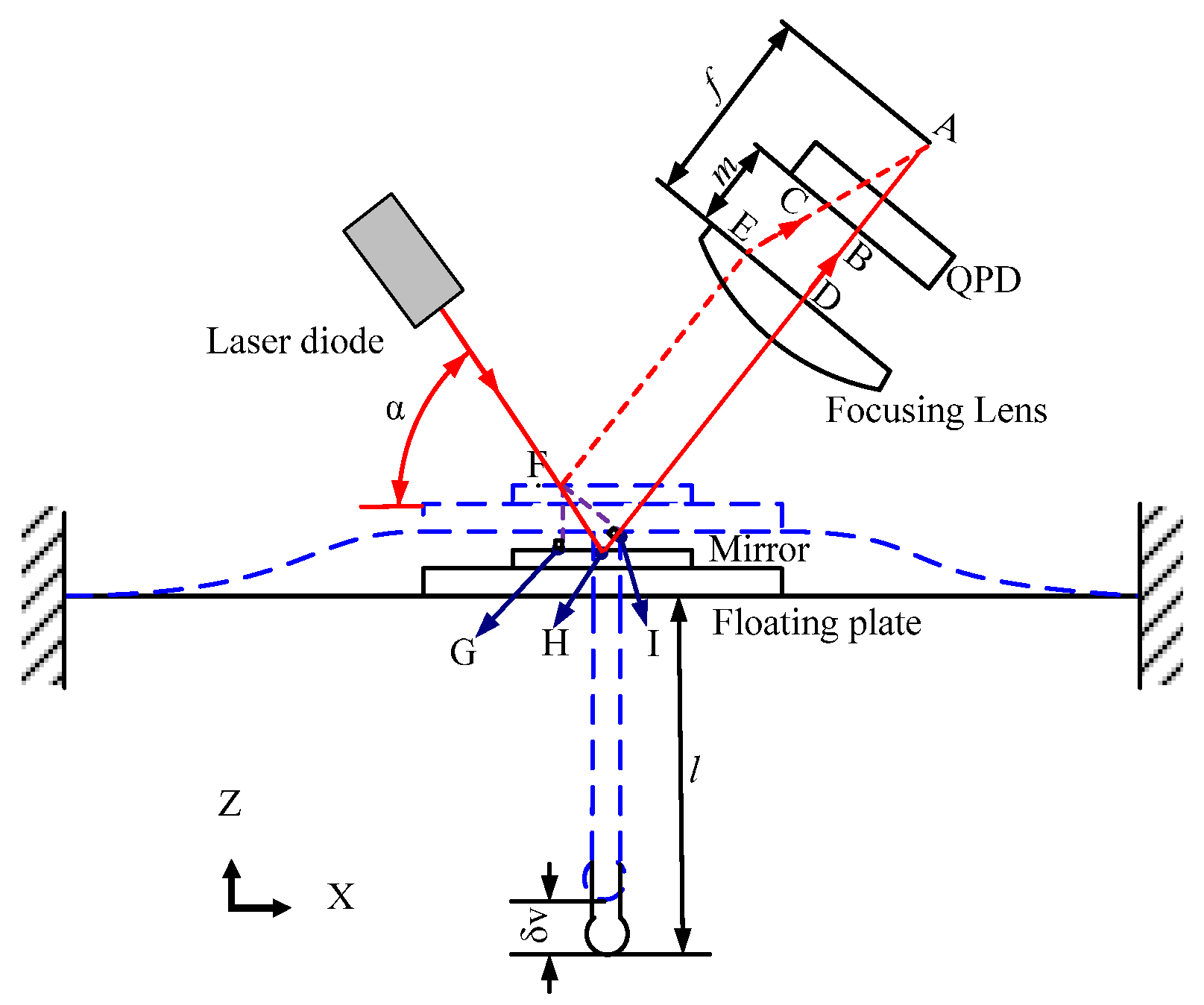
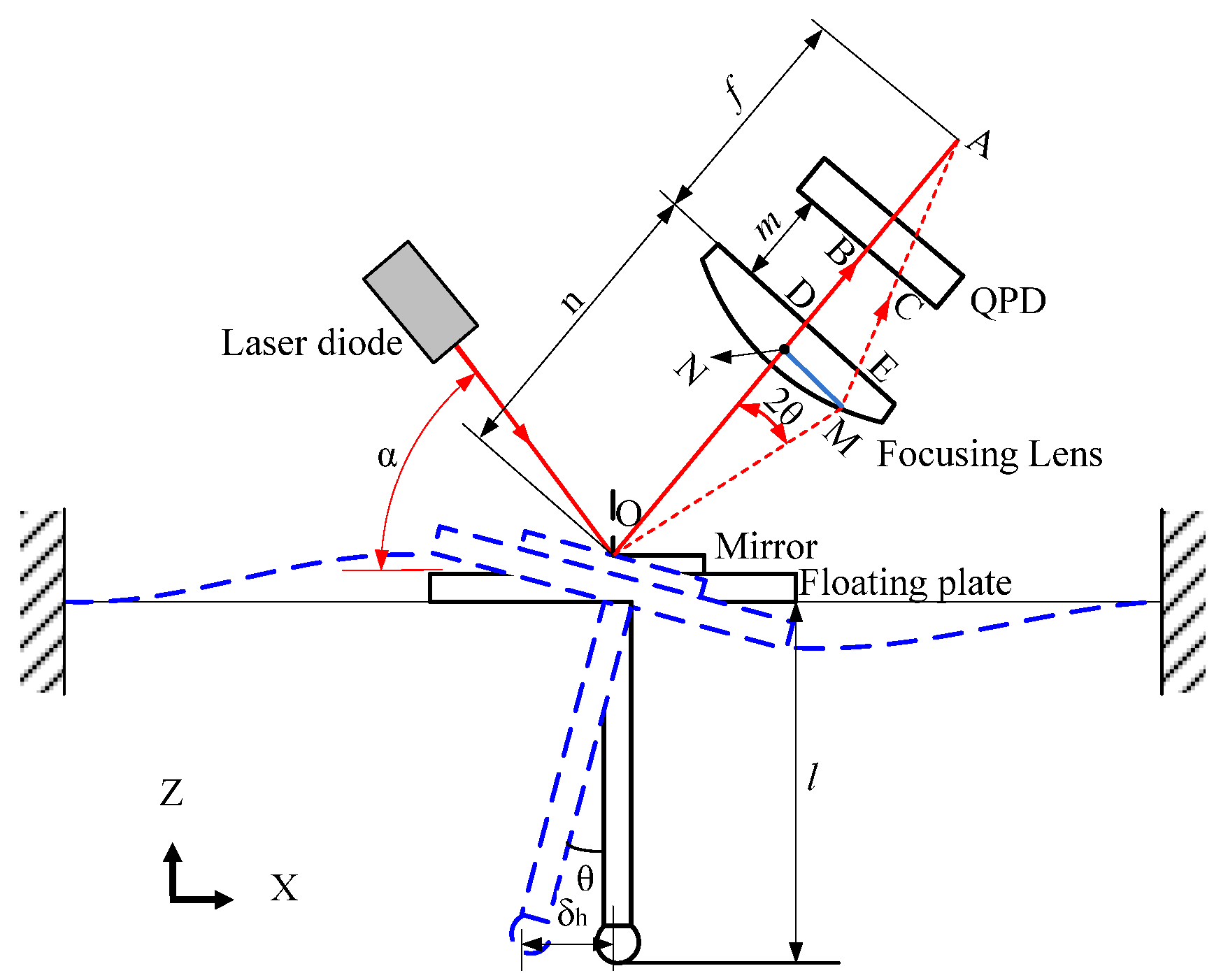
2. Structure and Principle
3. Analysis and Design of the Probe
3.1. The Sensitivity Analysis
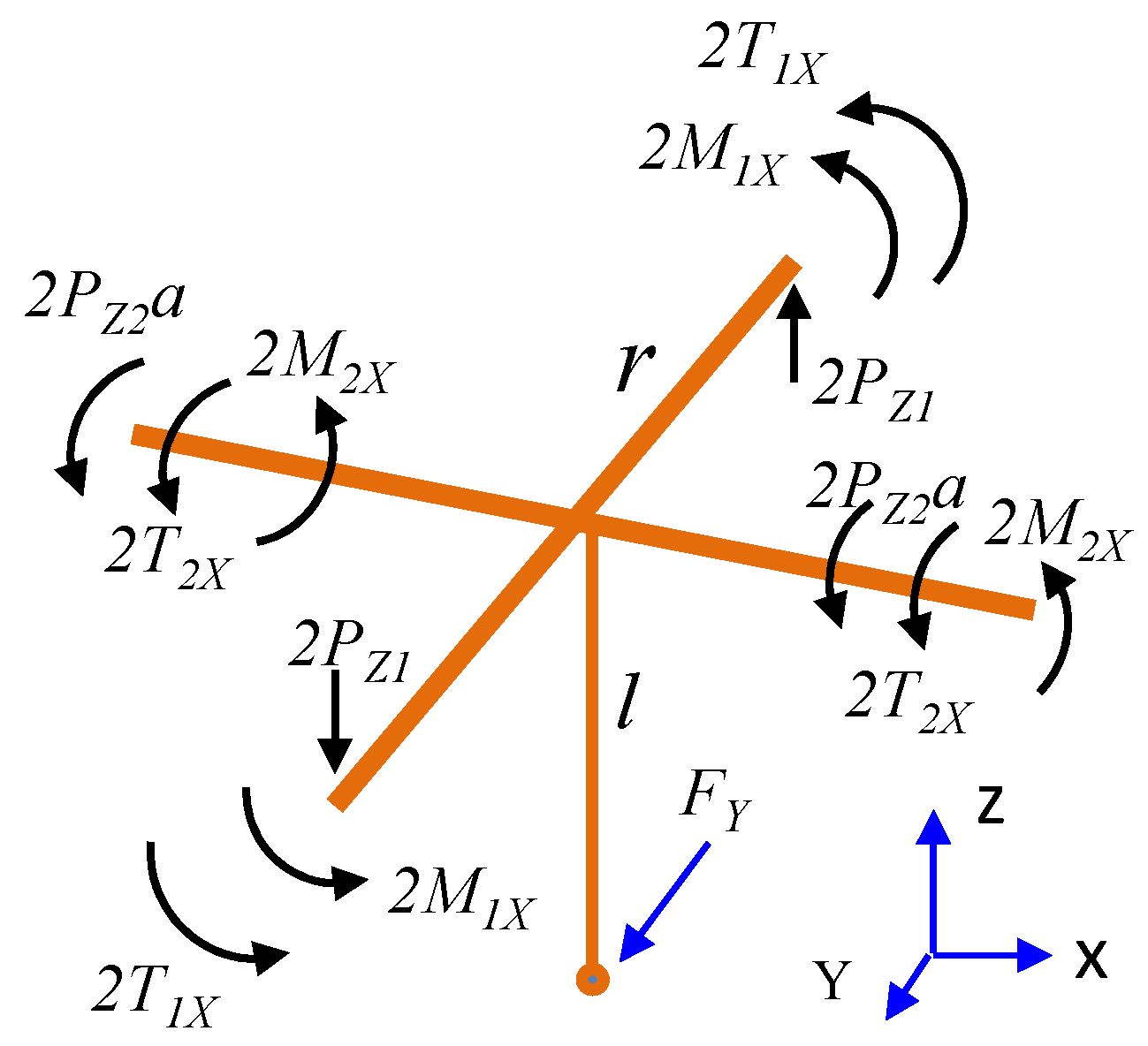
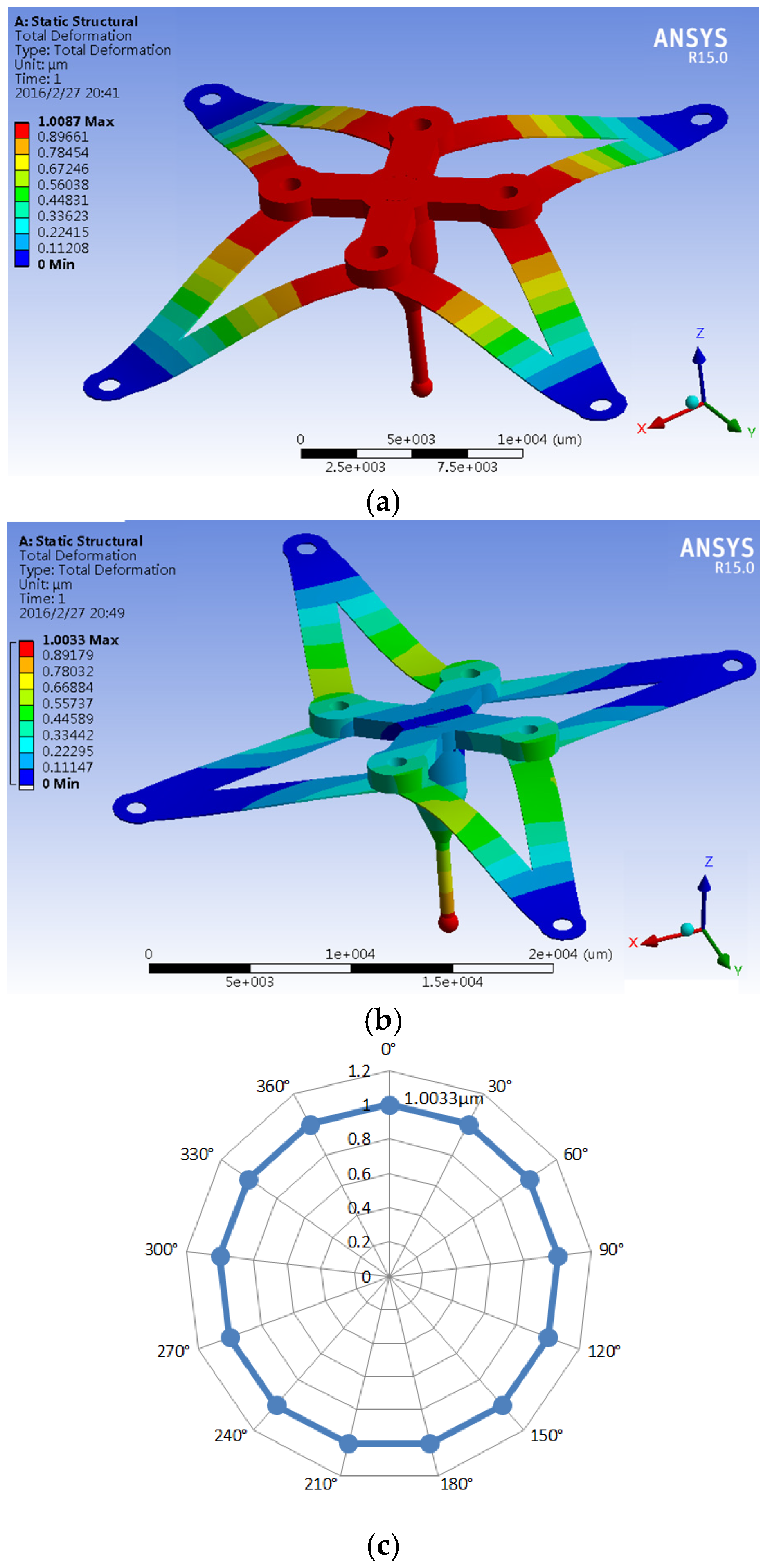
3.2. The Stiffness Analysis
3.3. Optimal Design for the Probe
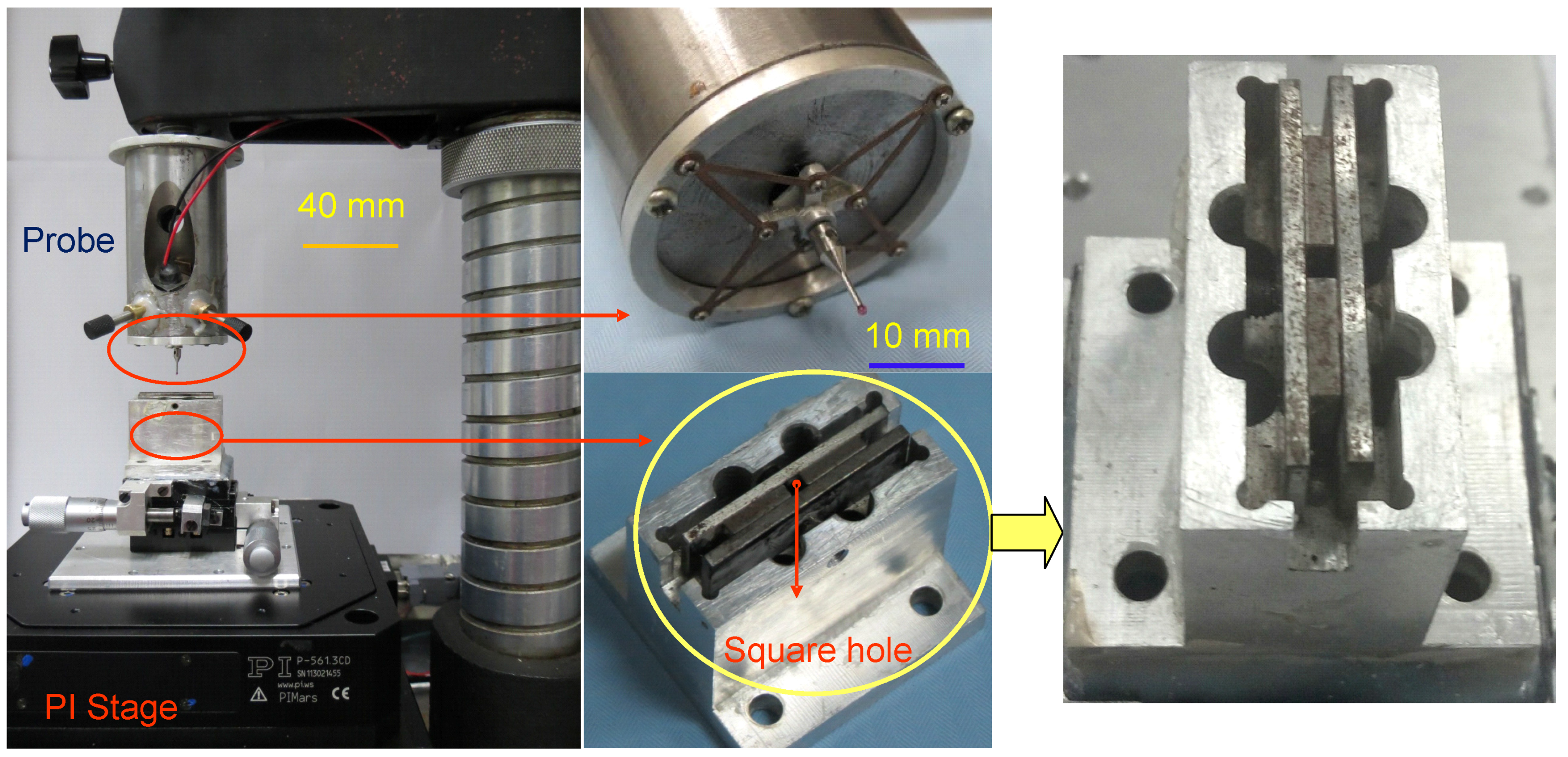
4. Experimental Results and Discussion
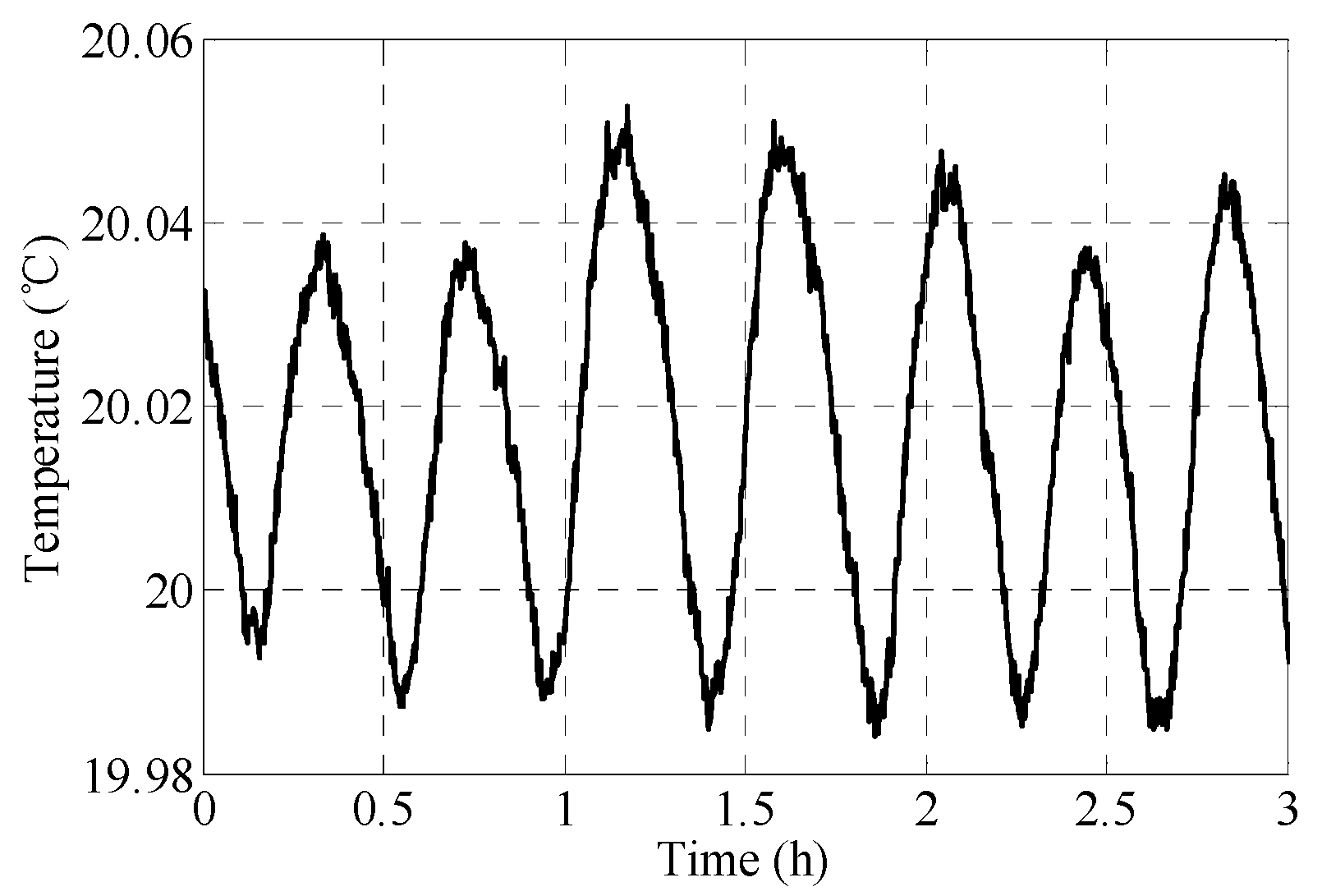
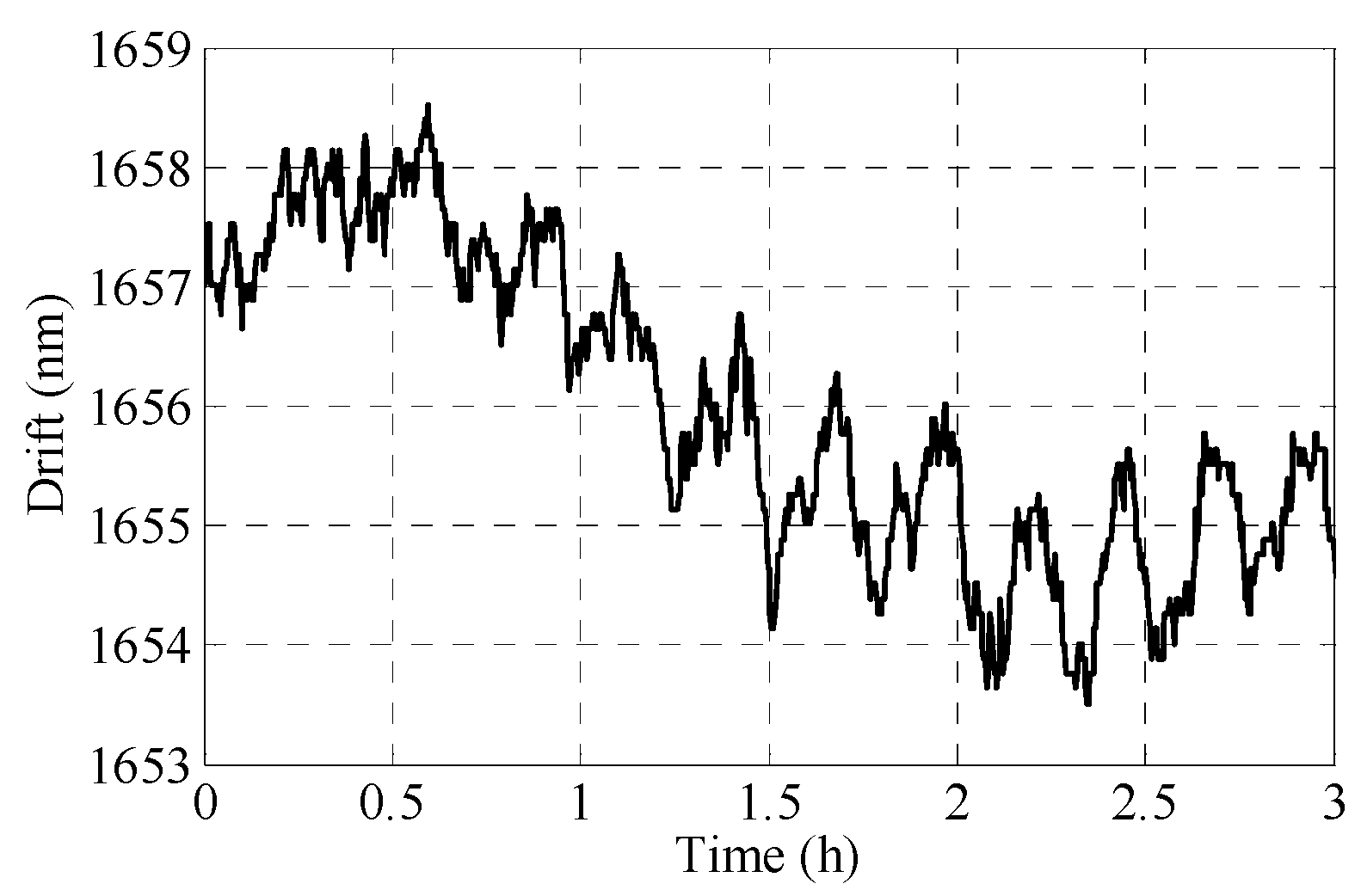
4.1. Probe Drift
4.2. Probe Repeatability
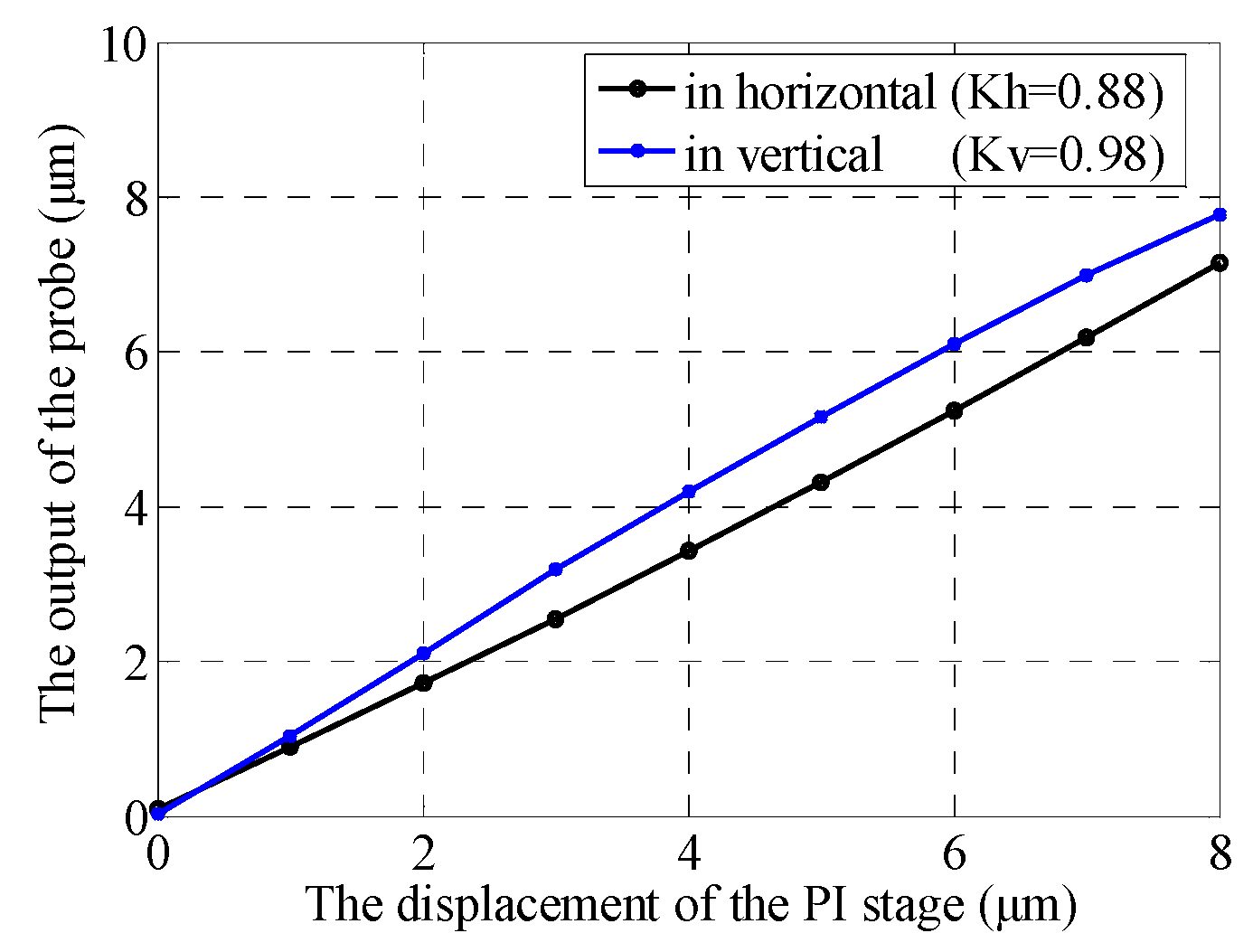
4.3. Sensitivity and Permissible Range
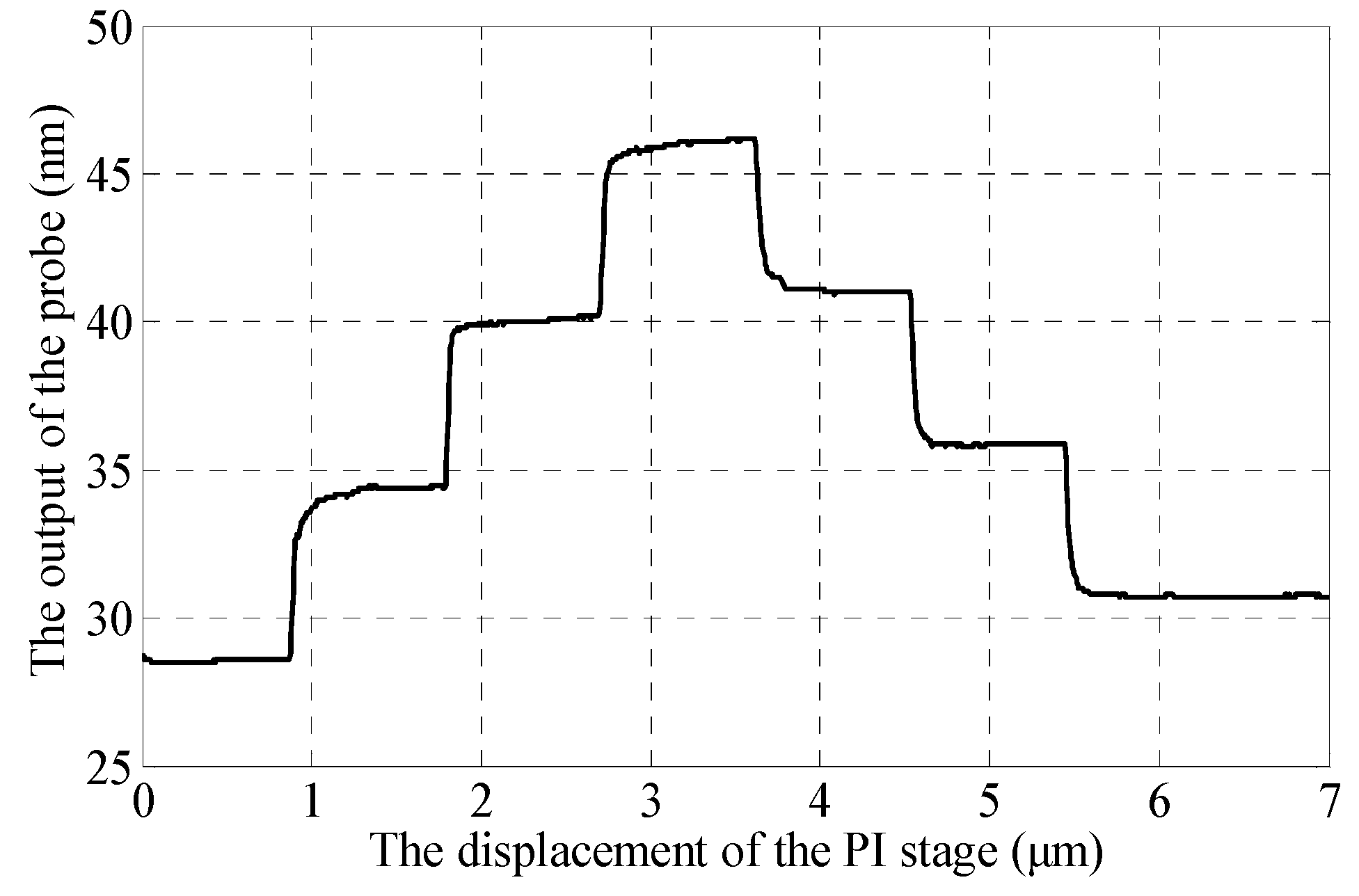
4.4. Probe Resolution
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| CMM | Coordinate measuring machine |
| QPD | Quadrant photo detector |
| PI | Physik Instrumente |
References
- McKeown, P. Nanotechnology—Special Article. In Proceedings of the Nano-Metrology in Precision Engineering, Hong Kong, China, 24–25 November 1998; pp. 45–55.
- Fan, K.C.; Fei, Y.T.; Yu, X.F.; Chen, Y.J.; Wang, W.L.; Chen, F.; Liu, Y.S. Development of a low-cost micro-CMM for 3D micro/nano measurements. Meas. Sci. Technol. 2006, 17, 524–532. [Google Scholar] [CrossRef]
- Jäeger, G.; Manske, E.; Hausotte, T. Nanopositioning and Measuring Machine. In Proceedings of the 2nd European Society for Precision Engineering and Nanotechnology, Turin, Italy, 28 May–1 June 2001; pp. 290–293.
- Takamasu, K.; Furutani, K.R.; Ozono, S. Development of Nano-CMM (Coordinate Measuring Machine with Nanometer Resolution). In Proceedings of the XIV IMEKO World Congress, Tampere, Finland, 1–6 June 1997; pp. 34–39.
- Peggs, G.N.; Lewis, A.J.; Oldfield, S. Design for a compact high-accuracy CMM. CIRP Ann. 1999, 48, 417–420. [Google Scholar] [CrossRef]
- Leach, R.K.; Murphy, J. The Design of Co-Ordinate Measuring Probe for Characterizing Truly Three-Dimensional Micro-Structures. In Proceedings of the 4th EUSPEN International Conference, Glasgow, UK, 30 May–3 June 2004; pp. 230–231.
- Dai, G.L.; Bütefisch, S.; Pohlenz, F.; Danzebrink, H.U. A high precision micro/nano CMM using piezoresistive tactile probes. Meas. Sci. Technol. 2009, 20, 1118–1121. [Google Scholar] [CrossRef]
- Haitjema, H.; Pril, W.O.; Schellekens, P. Development of a silicon-based nano probe system for 3-D measurements. CIRP Ann. 2001, 50, 365–368. [Google Scholar] [CrossRef]
- Peiner, E.; Balke, M.; Doering, L.; Brand, U. Tactile probes for dimensional metrology with micro components at nanometre resolution. Meas. Sci. Technol. 2008, 19, 579–588. [Google Scholar] [CrossRef]
- Tibrewala, A.; Phataralaoha, A.; Büttgenbach, S. Development, fabrication and characterization of a 3D tactile sensor. J. Micromech. Microeng. 2009, 19, 125005–125009. [Google Scholar] [CrossRef]
- Küng, A.; Meli, F.; Thalmann, R. Ultraprecision micro-CMM using a low force 3D touch probe. Meas. Sci. Technol. 2005, 18, 319–327. [Google Scholar] [CrossRef]
- Hughes, E.B.; Wilson, A.; Peggs, G.N. Design of high accuracy CMM based on multilateration techniques. CIRP Ann. 2000, 49, 391–394. [Google Scholar] [CrossRef]
- Muralikrishnan, B.; Stone, J.A.; Stoup, J.R. Fiber deflection probe for small hole metrology. Precis. Eng. 2006, 30, 154–164. [Google Scholar] [CrossRef]
- Kim, S.W. New design of precision CMM based upon volumetric phase-measuring interferometry. CIRP Ann. 2001, 50, 357–360. [Google Scholar] [CrossRef]
- Ji, H.; Hsu, H.Y.; Kong, L.X.; Wedding, A.B. Development of a contact probe incorporating a Bragg grating strain sensor for nano coordinate measuring machines. Meas. Sci. Technol. 2009, 20. [Google Scholar] [CrossRef]
- Ding, B.Z.; Fei, Y.T.; Fan, K.C. 3D Touch Trigger Probe Based on Fiber Bragg Gratings. In Proceedings of the Metrology, Inspection and Process Control for Microlithography XXIII, San Jose, CA, USA, 19–20 January 2009.
- Liu, F.F.; Fei, Y.T.; Xia, H.J.; Chen, L.J. A new micro/nano displacement measurement method based on a double-fiber Bragg grating (FBG) sensing structure. Meas. Sci. Technol. 2012, 23, 54002–54010. [Google Scholar] [CrossRef]
- Enami, K.; Kuo, C.C.; Nogami, T.; Hiraki, M.; Takamasu, K.; Ozono, S. Development of nano-Probe System Using Optical Sensing. In Proceedings of the IMEKO-XV World Congress, Osaka, Japan, 13–18 June 1999; pp. 189–192.
- Fan, K.C.; Cheng, F.; Wang, W.L.; Chen, Y.J.; Lin, J.Y. A scanning contact probe for a micro-coordinate measuring machine (CMM). Meas. Sci. Technol. 2010, 21, 603–616. [Google Scholar] [CrossRef]
- Chu, C.L.; Chiu, C.Y. Development of a low-cost nanoscale touch trigger probe based on two commercial DVD pick-up heads. Meas. Sci. Technol. 2007, 18, 1831–1842. [Google Scholar] [CrossRef]
- Liebrich, T.; Knapp, W. New concept of a 3D-probing system for micro-components. CIRP Ann. 2010, 59, 513–516. [Google Scholar] [CrossRef]
- Balzer, F.G.; Hausotte, T.; Dorozhovets, N.; Manske, E.; Jäger, G. Tactile 3D microprobe system with exchangeable styli. Meas. Sci. Technol. 2011, 22, 94018–94024. [Google Scholar] [CrossRef]
- Joonh, Y.K.; Jae, W.H.; Yong, S.K.; Lee, D.Y.; Lee, K. Atomic force microscope with improved scan accuracy, scan speed, and optical vision. Rev. Sci. Instrum. 2003, 74, 4378–4383. [Google Scholar]
- Li, R.J.; Fan, K.C.; Huang, Q.X.; Qian, J.Z.; Gong, W.; Wang, Z.W. Design of a large scanning range contact probe for nano-coordinate measurement machines (CMM). Opt. Eng. 2012, 51, 527–529. [Google Scholar] [CrossRef]
- Li, R.J.; Fan, K.C.; Miao, J.W.; Huang, Q.X.; Tao, S. An analogue contact probe using a compact 3D optical sensor for micro/nano coordinate measuring machines. Meas. Sci. Technol. 2014, 25, 1–33. [Google Scholar] [CrossRef]
- Li, R.J.; Fan, K.C.; Huang, Q.X.; Zhou, H.; Gong, E.M. A long-stroke 3D contact scanning probe for micro/nano coordinate measuring machine. Precis. Eng. 2015, 43, 220–229. [Google Scholar] [CrossRef]
- Li, R.J.; Fan, K.C.; Zhou, H.; Wang, N.; Huang, Q.X. Elastic mechanism design of the CMM contact probe. In Proceedings of the SPIE, Chengdu, China, 8–11 August 2013; pp. 182–185.
- Feng, J.; Li, R.J.; Fan, K.C.; Zhou, H.; Zhang, H. Development of a low-cost and vibration-free constant-temperature chamber for precision measurement. Sens. Mater. 2015, 27, 329–340. [Google Scholar] [CrossRef]
- Li, R.J.; Fan, K.C.; Qian, J.Z.; Huang, Q.X.; Gong, W.; Miao, J.W. Stability analysis of contact scanning probe for micro/nano coordinate measuring machine. Nanotechnol. Precis. Eng. 2012, 10, 125–131. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Material of the leaf springs | beryllium-copper alloy |
| Young’s modulus of the leaf springs (GPa) | 130 |
| Leaf thickness × width × length (mm) | 0.1 × 2 × 13 |
| Material of the floating plate | aluminum alloy |
| Young’s modulus of the floating plate (GPa) | 71 |
| floating plate arm thickness × width × length (mm) | 1.5 × 2 × 5.5 |
| Weight of the floating plate (g) | 0.2 |
| Material of the stylus | tungsten stylus with a ruby ball tip |
| Young’s modulus of the stylus (GPa) | 193 |
| Length of the stylus (mm) | 10 |
| Diameter of the ball tip (mm) | 0.5 |
| Item | Residual Errors (nm) | ||||
|---|---|---|---|---|---|
| X+ | X− | Y+ | Y− | Z | |
| 1st | −0.6 | −1.1 | −2.7 | −1.4 | −1.9 |
| 2nd | 2.9 | −0.8 | 0.2 | 1.3 | −1.4 |
| 3rd | 0.6 | 1.9 | −1.8 | −0.3 | −1.2 |
| 4th | −2.2 | 0.7 | 1.6 | 1.3 | 0.1 |
| 5th | 0.6 | −2.6 | 2.1 | 0.7 | −2.4 |
| 6th | −3.2 | 0.8 | 0.1 | −0.3 | −2.8 |
| 7th | 1.3 | 2.0 | 1.2 | −1.0 | −1.0 |
| standard deviation | 2.0 | 1.7 | 1.8 | 1.1 | 1.0 |
| repeatability (K = 2) | 4.0 | 3.4 | 3.6 | 2.2 | 2.0 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, R.-J.; Xiang, M.; He, Y.-X.; Fan, K.-C.; Cheng, Z.-Y.; Huang, Q.-X.; Zhou, B. Development of a High-Precision Touch-Trigger Probe Using a Single Sensor. Appl. Sci. 2016, 6, 86. https://doi.org/10.3390/app6030086
Li R-J, Xiang M, He Y-X, Fan K-C, Cheng Z-Y, Huang Q-X, Zhou B. Development of a High-Precision Touch-Trigger Probe Using a Single Sensor. Applied Sciences. 2016; 6(3):86. https://doi.org/10.3390/app6030086
Chicago/Turabian StyleLi, Rui-Jun, Meng Xiang, Ya-Xiong He, Kuang-Chao Fan, Zhen-Ying Cheng, Qiang-Xian Huang, and Bin Zhou. 2016. "Development of a High-Precision Touch-Trigger Probe Using a Single Sensor" Applied Sciences 6, no. 3: 86. https://doi.org/10.3390/app6030086
APA StyleLi, R. -J., Xiang, M., He, Y. -X., Fan, K. -C., Cheng, Z. -Y., Huang, Q. -X., & Zhou, B. (2016). Development of a High-Precision Touch-Trigger Probe Using a Single Sensor. Applied Sciences, 6(3), 86. https://doi.org/10.3390/app6030086