An Experimental Platform for Autonomous Bus Development





Abstract
:1. Introduction
2. Materials and Methods
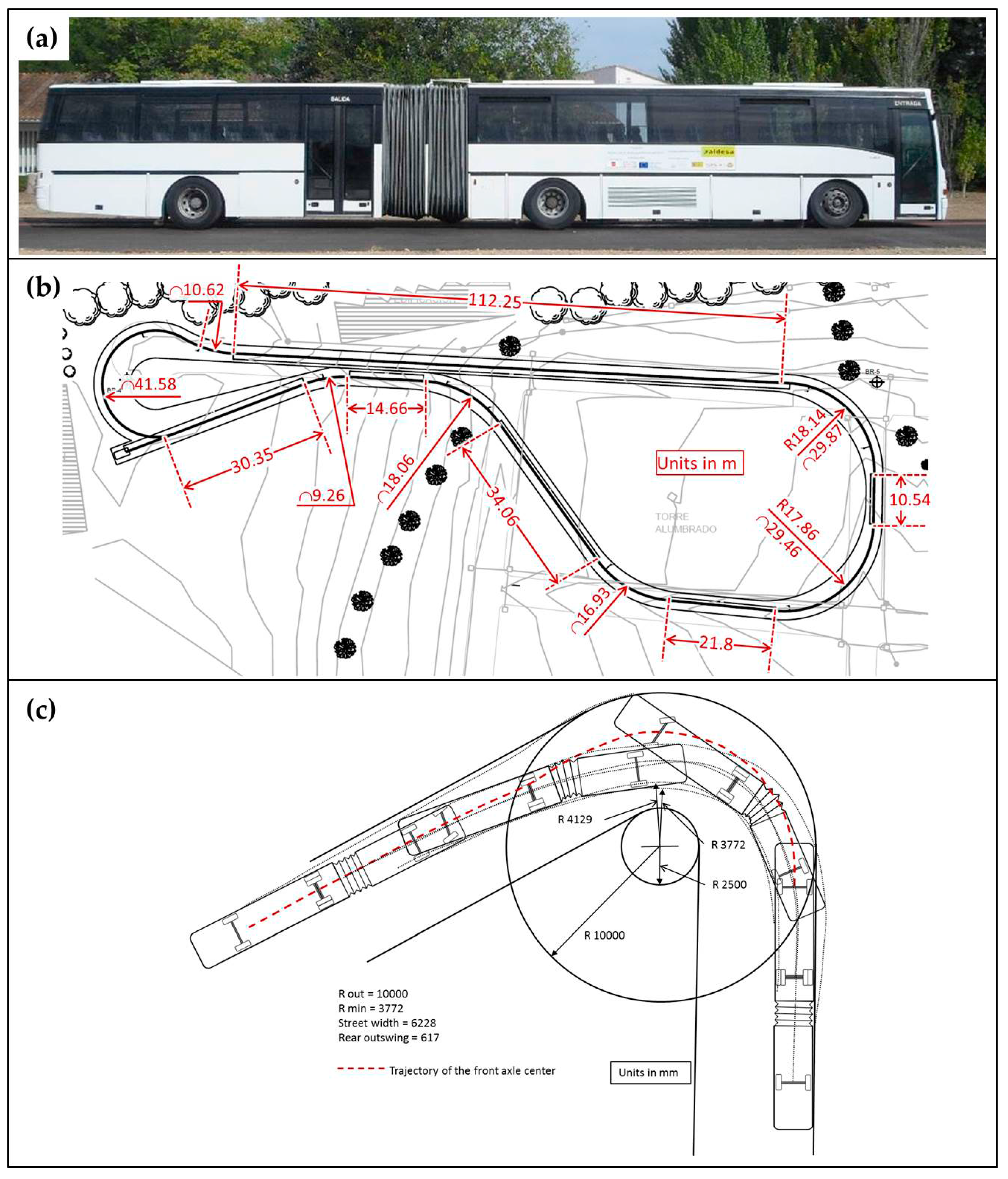
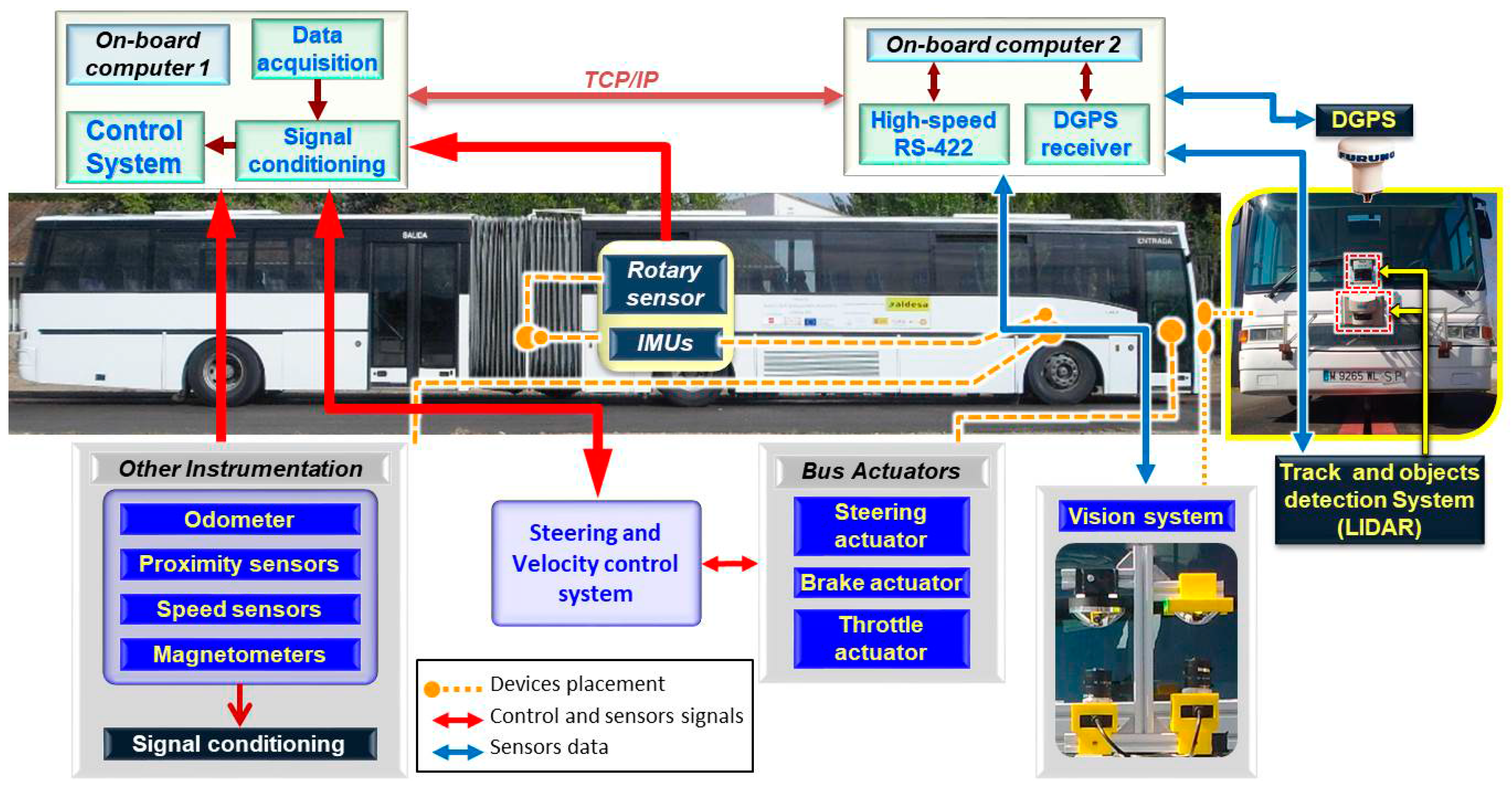
2.1. Experimental Platform Overview
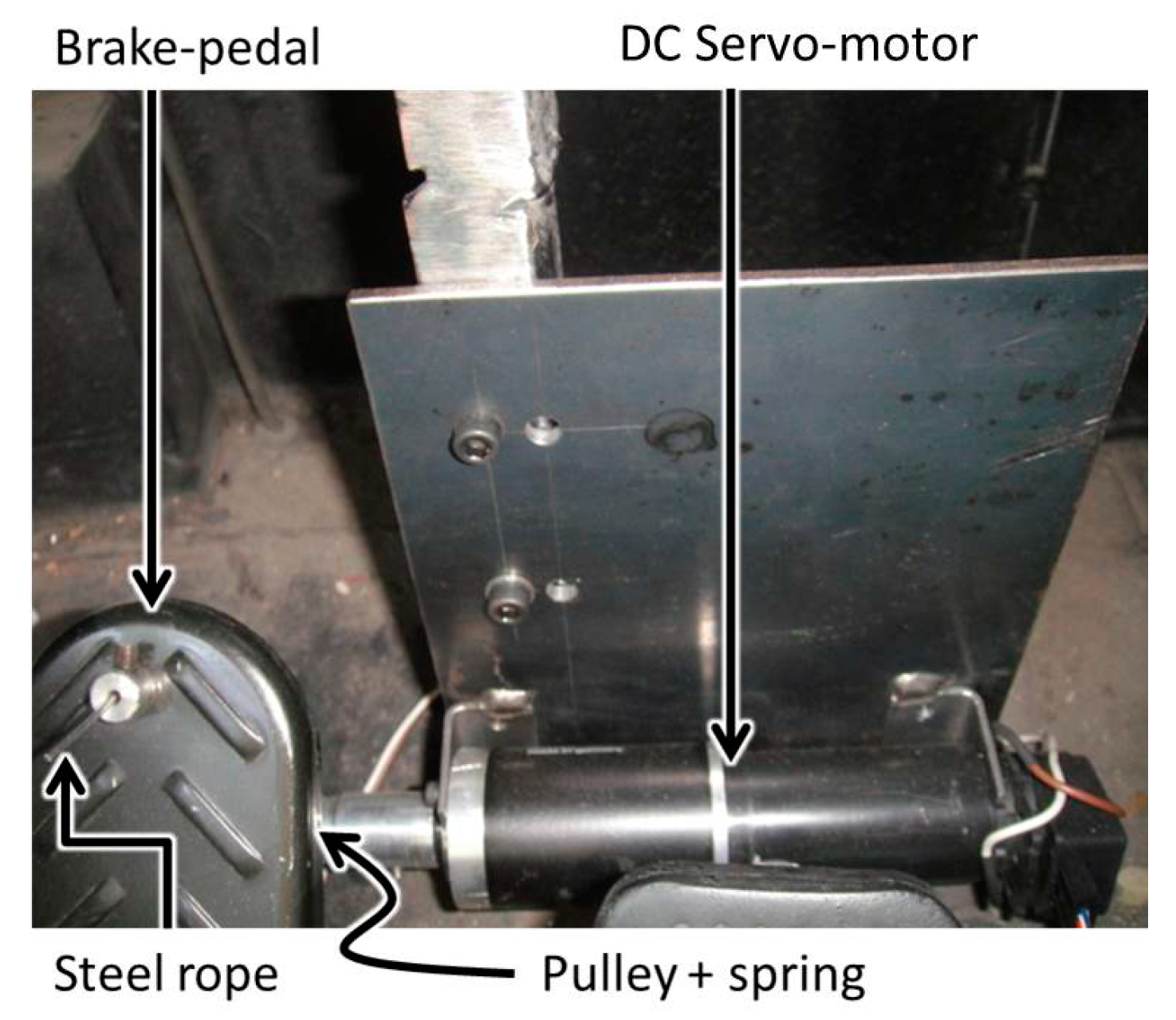
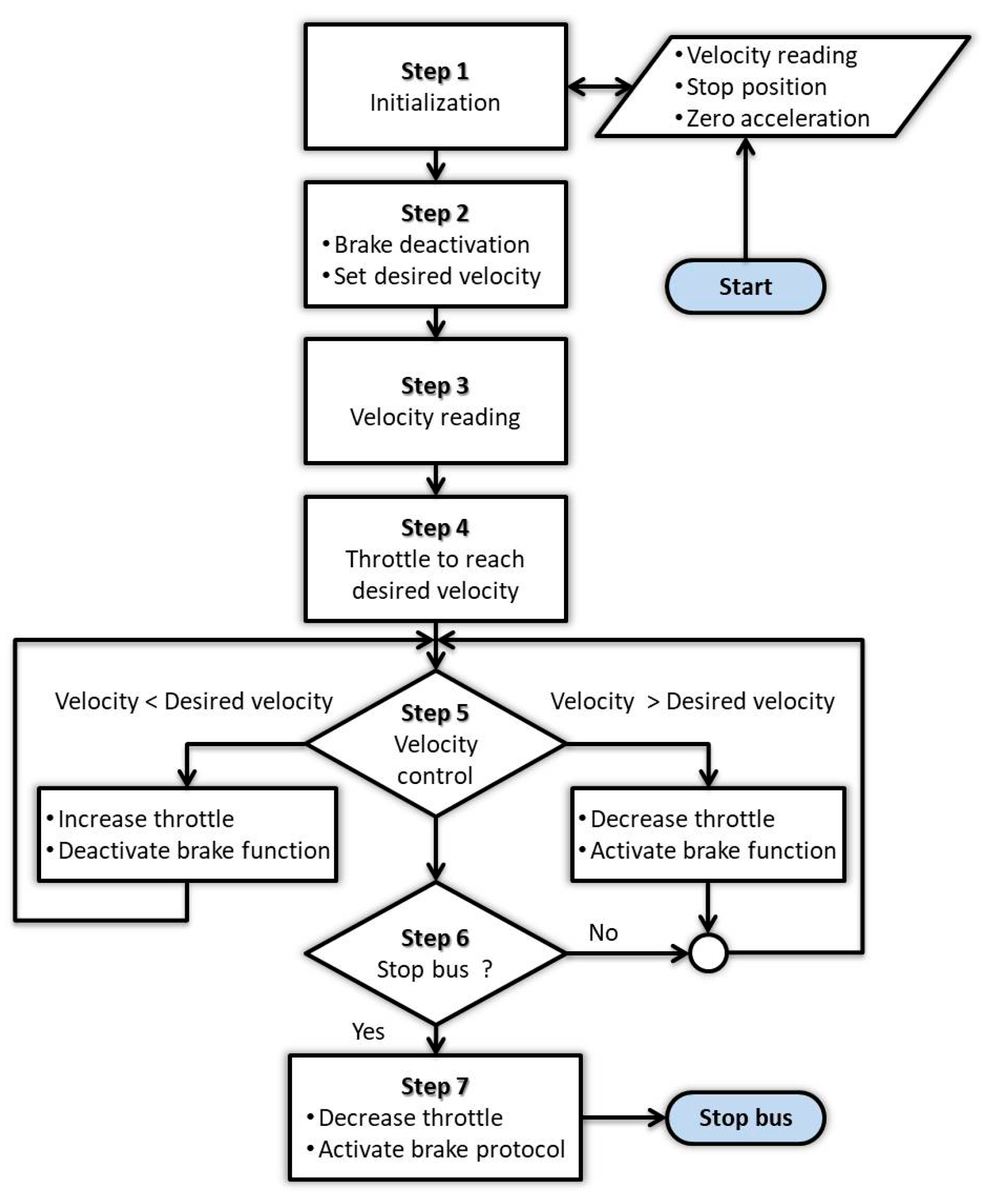
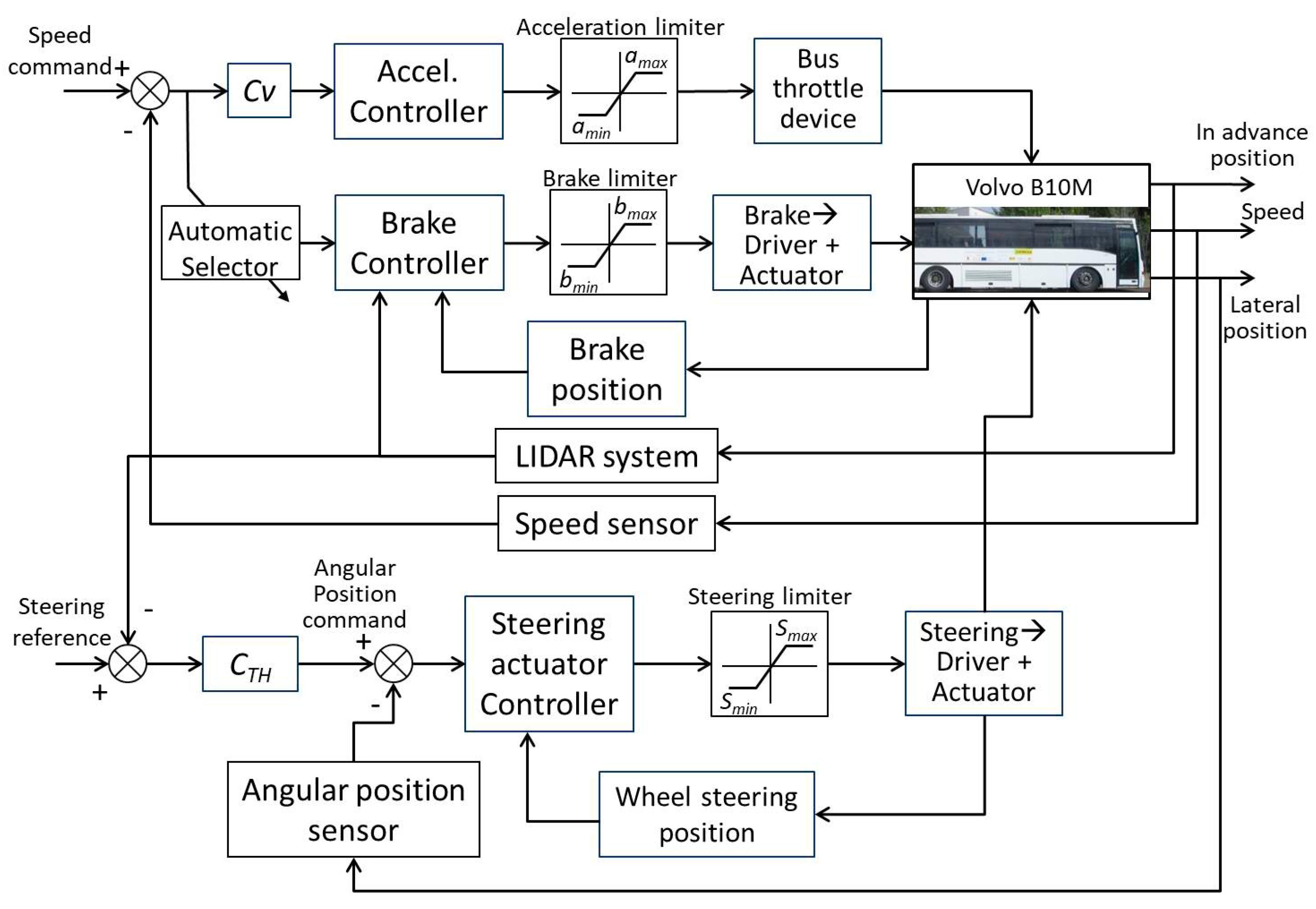
2.2. Velocity Control
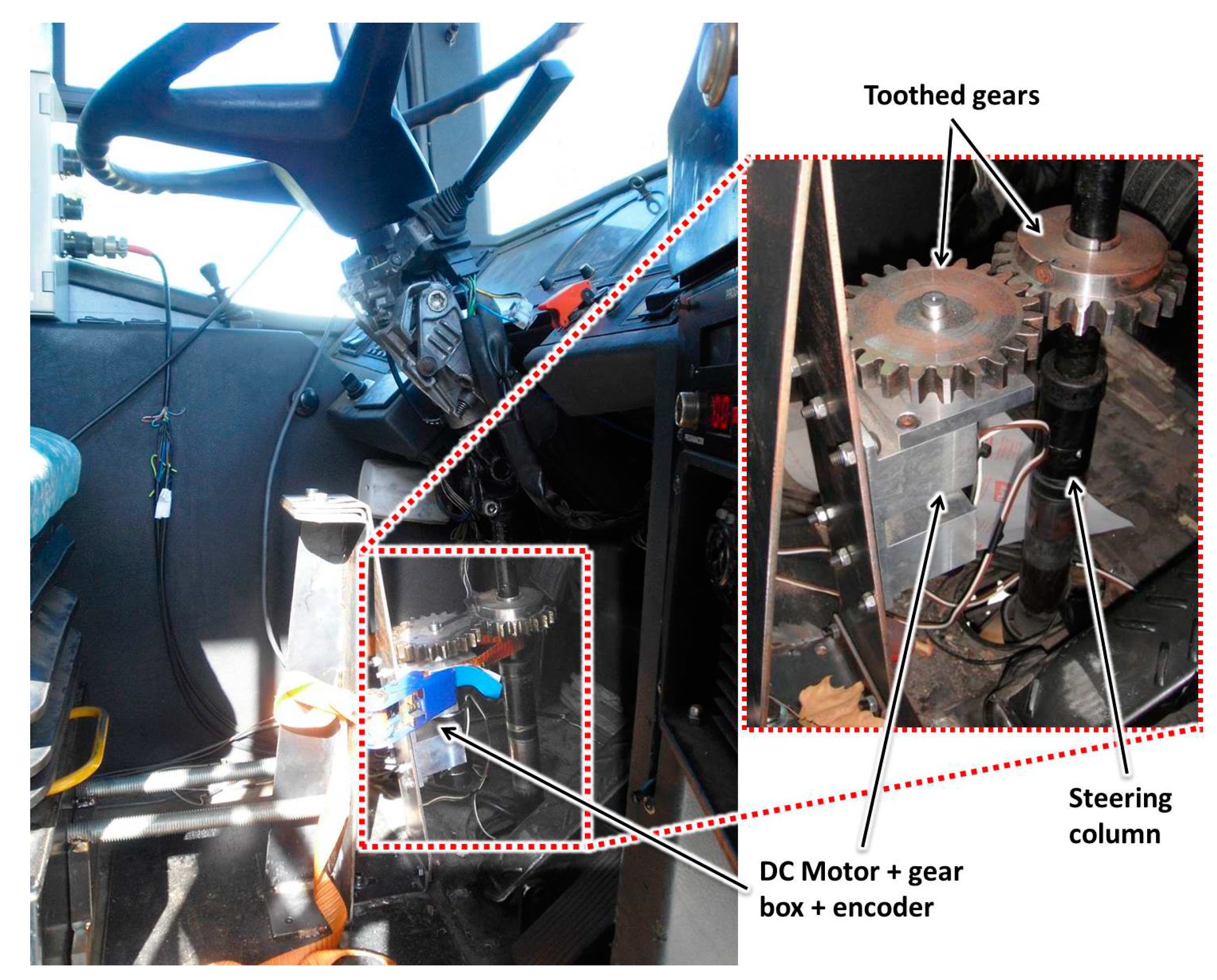
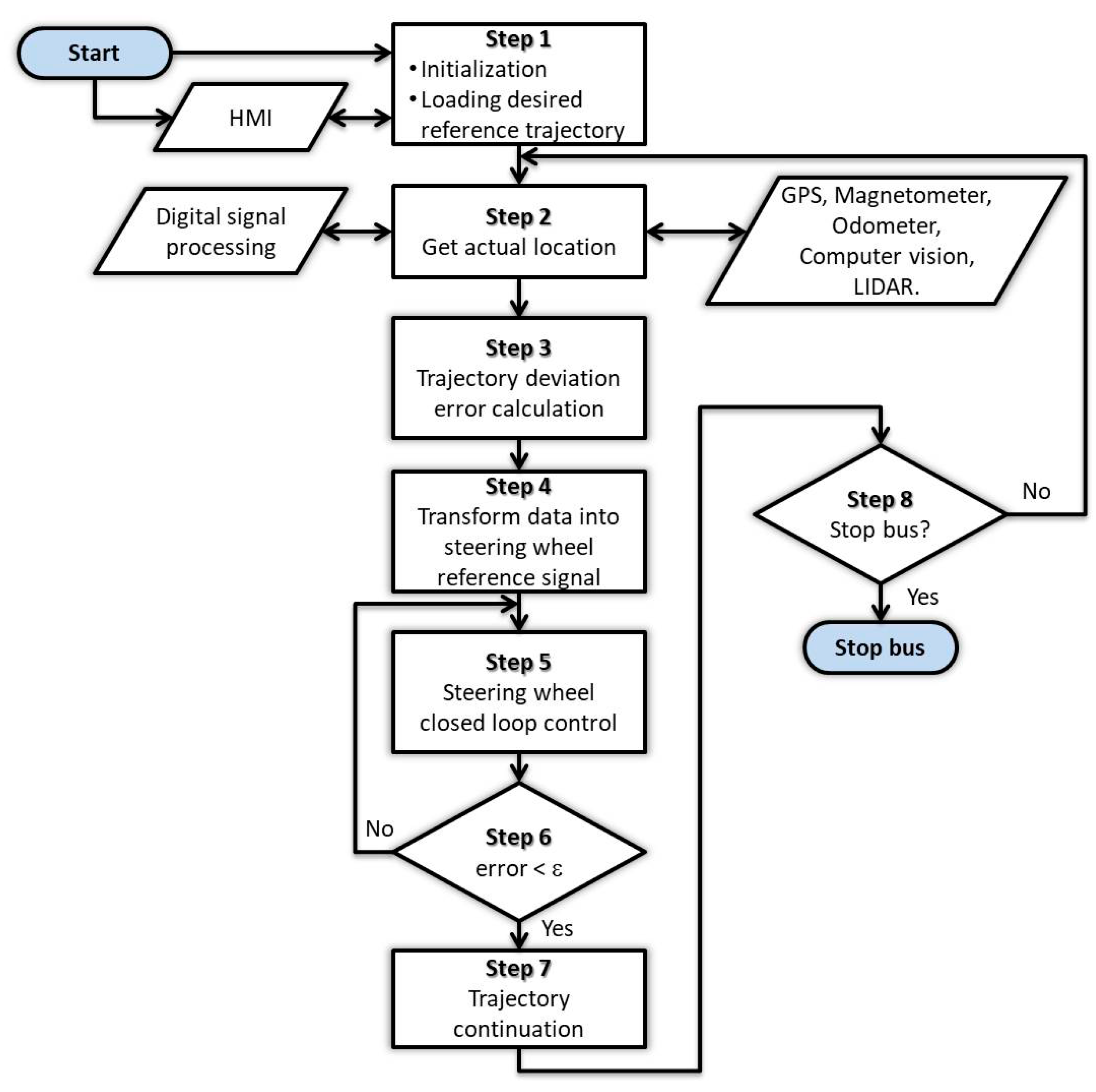
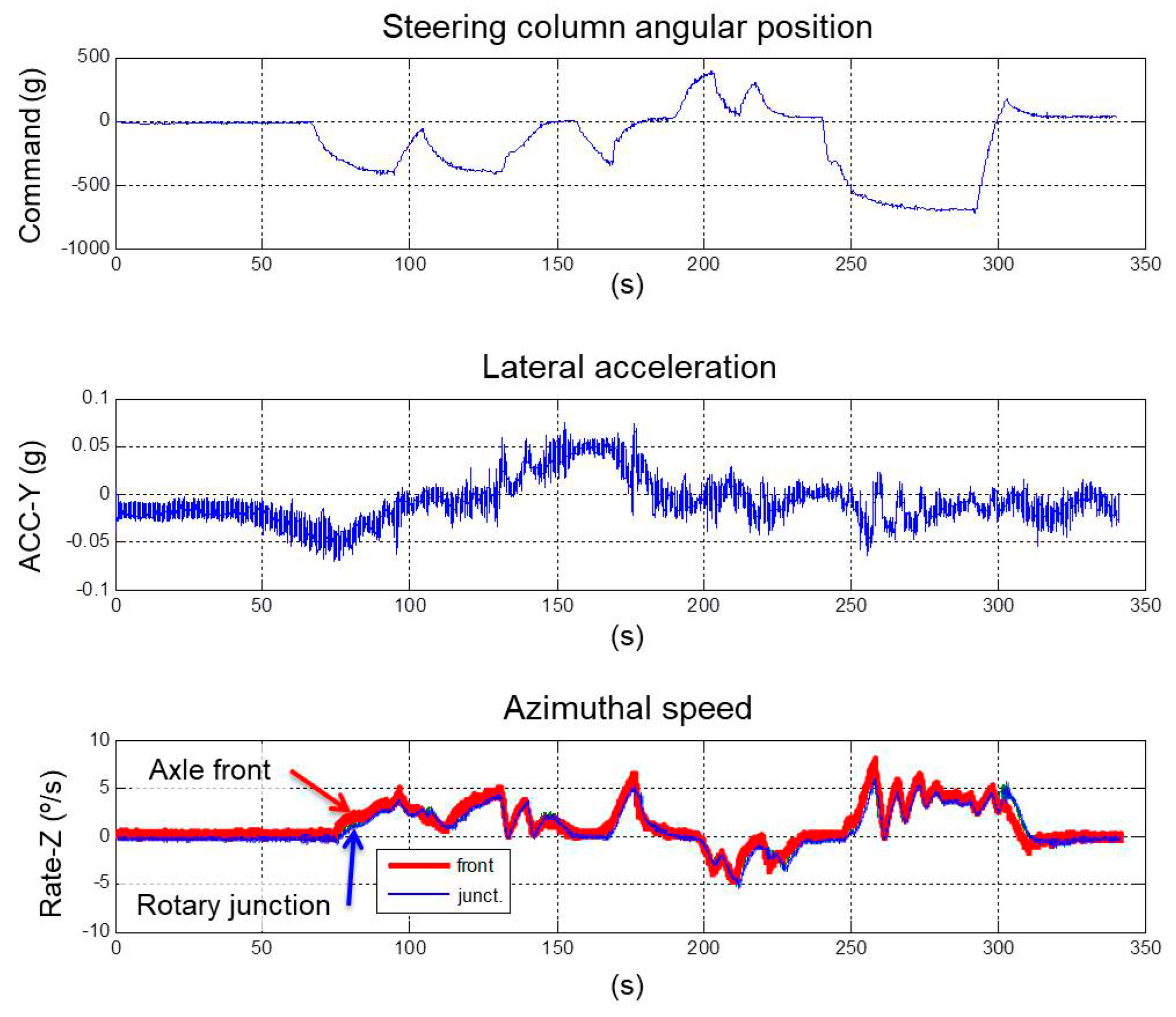
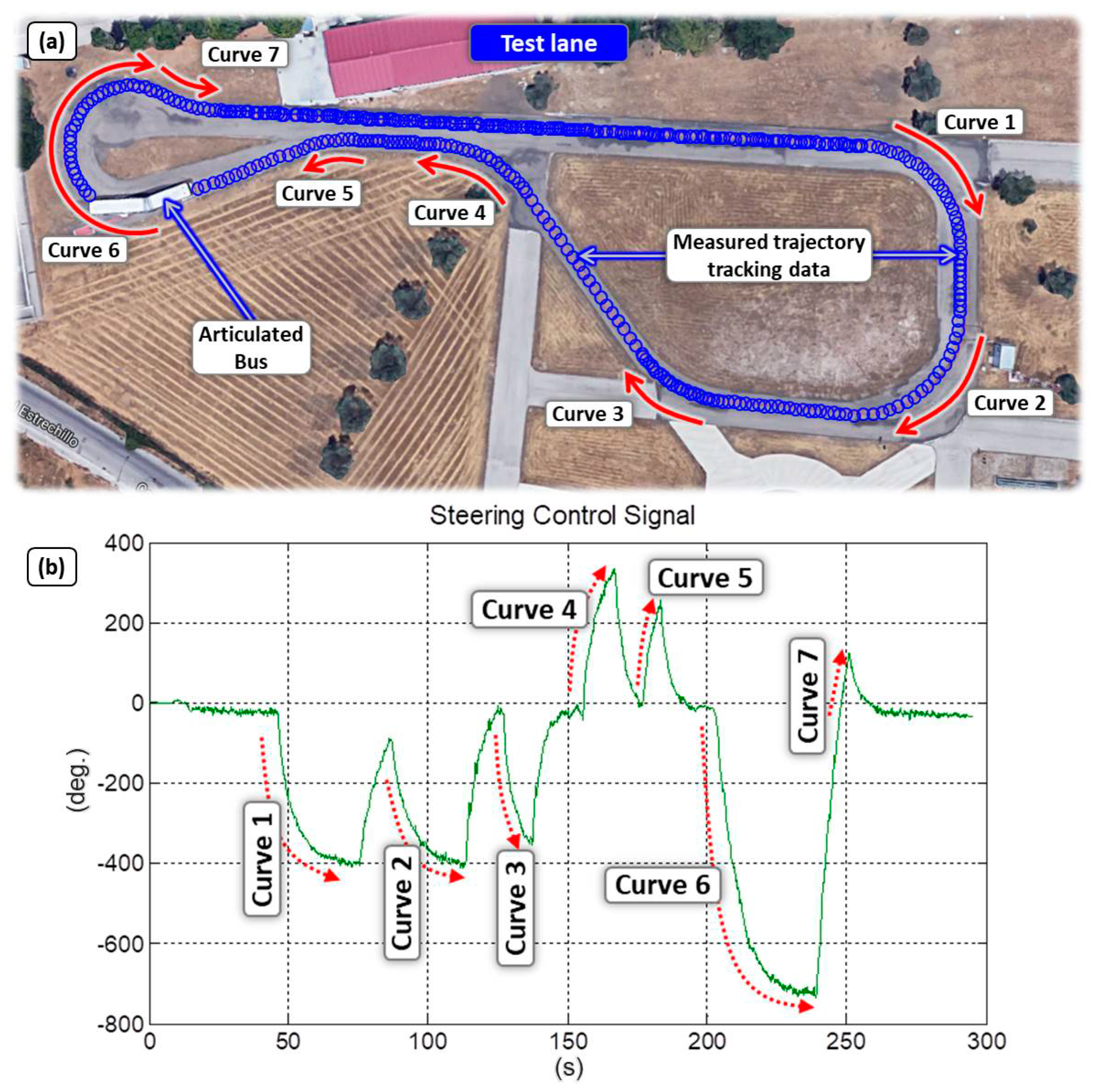
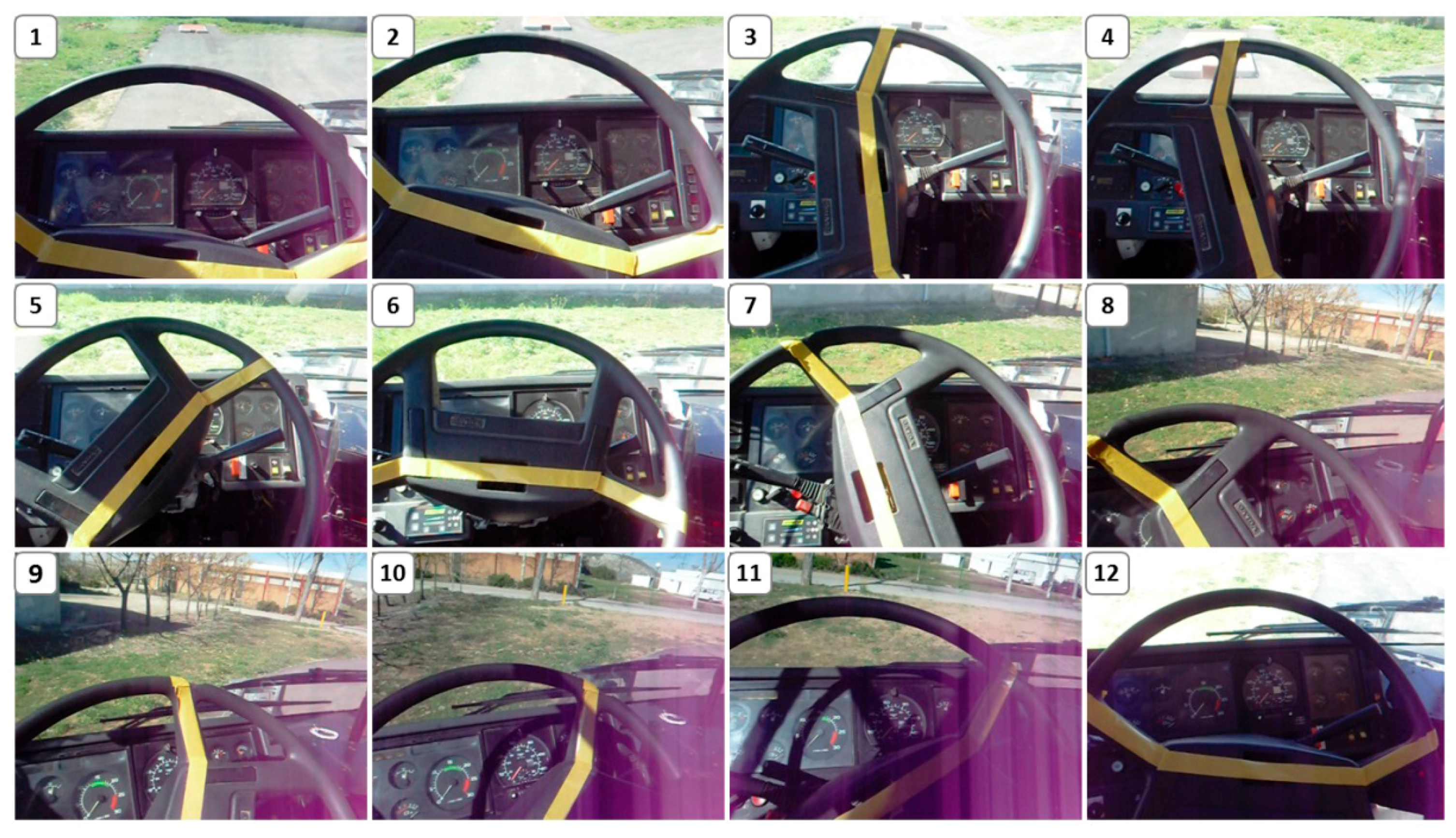
2.3. Steering Control
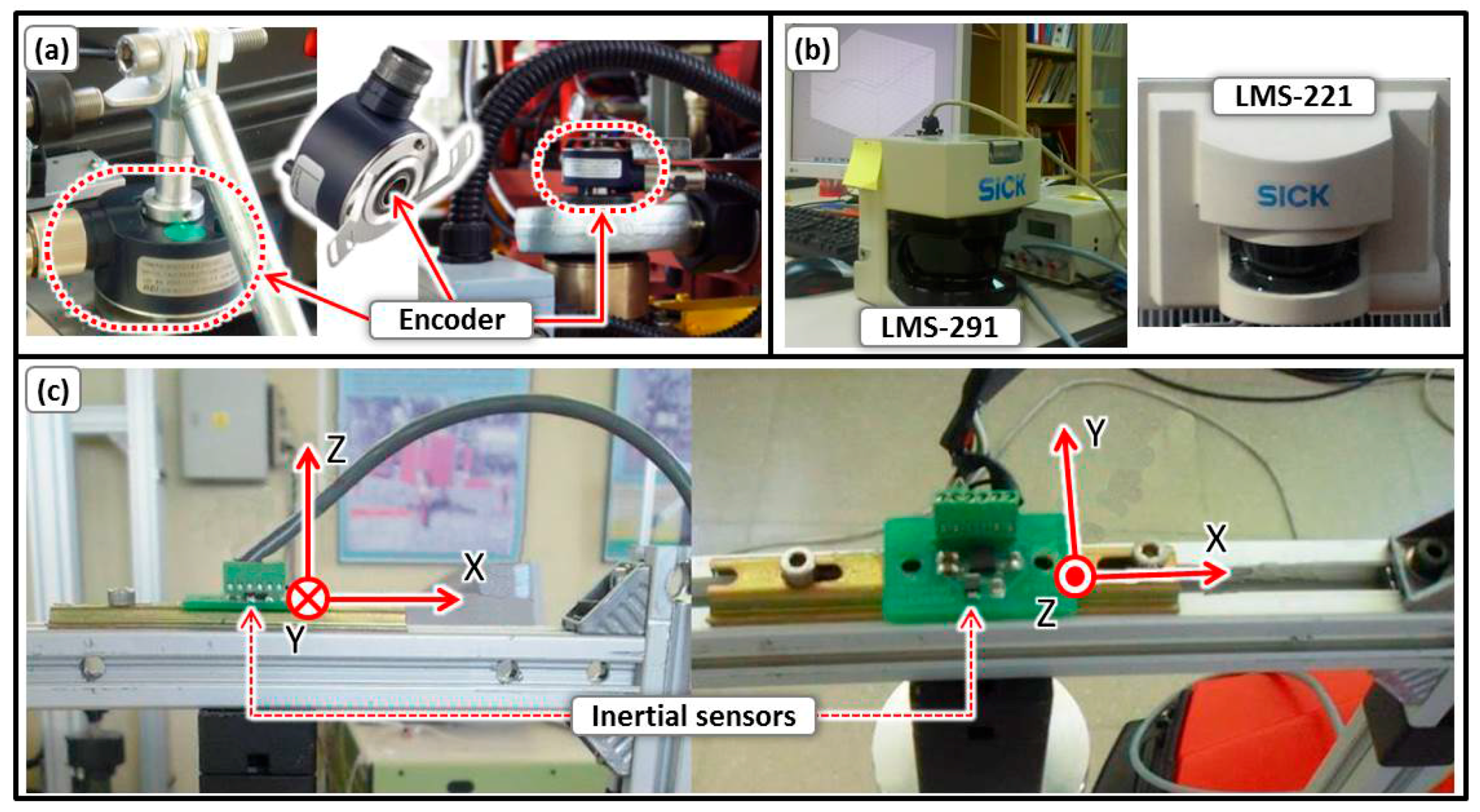
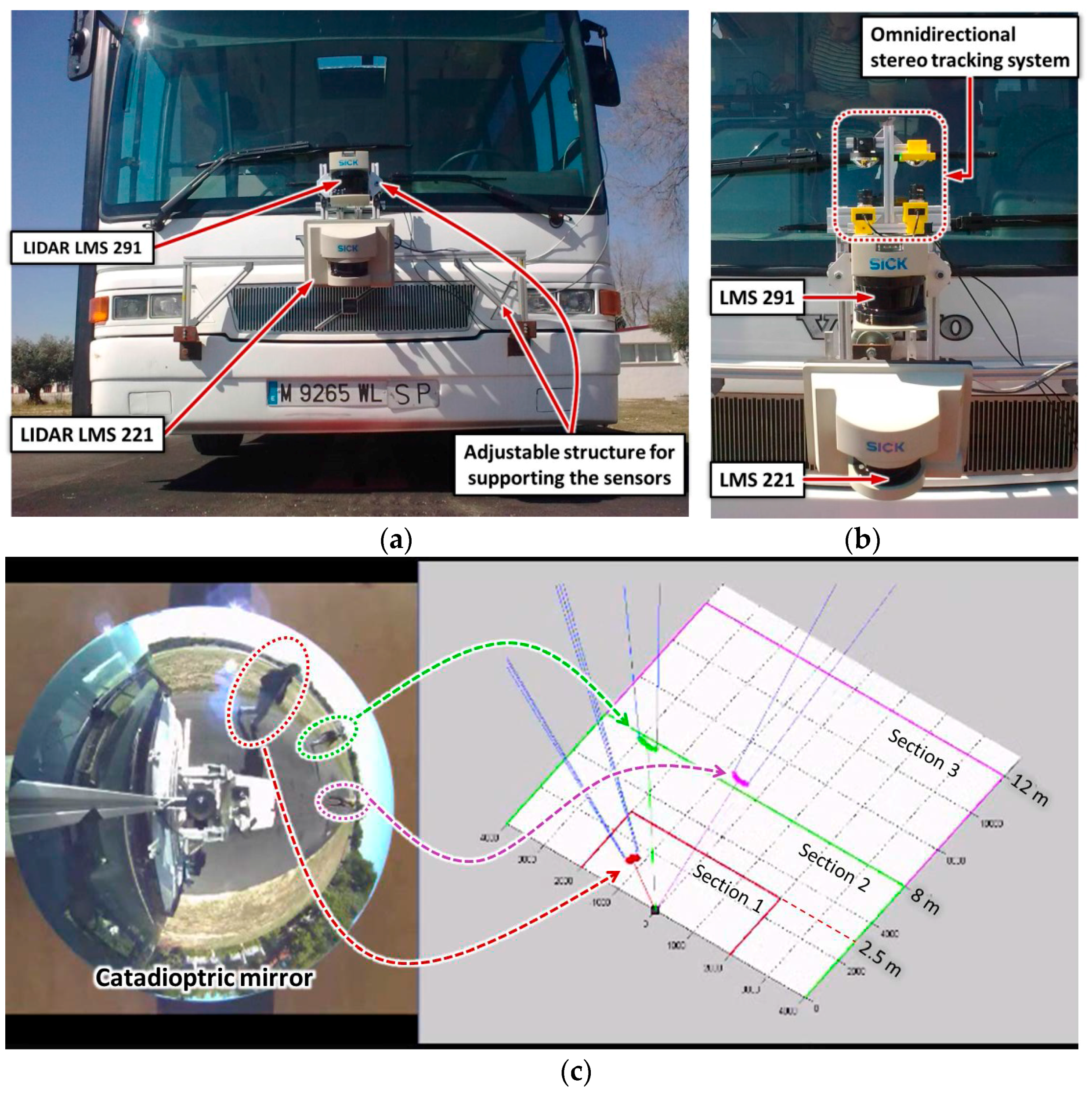
2.4. Obstacle Detection
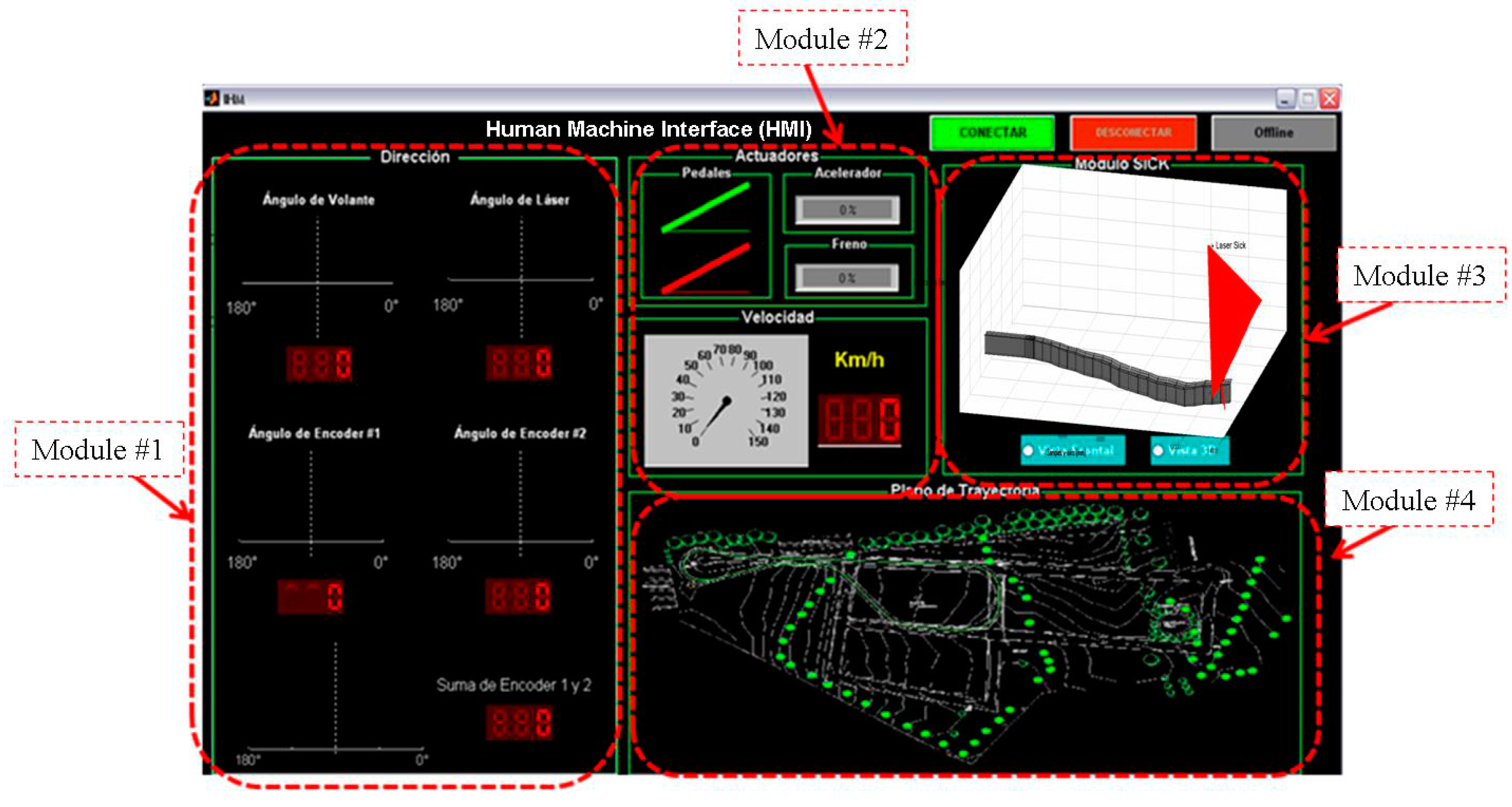
2.5. Software and HMI
- Multiple sensors and variables can be visualized; two and three dimensions are considered for some sensors.
- Real-time visualization of the information.
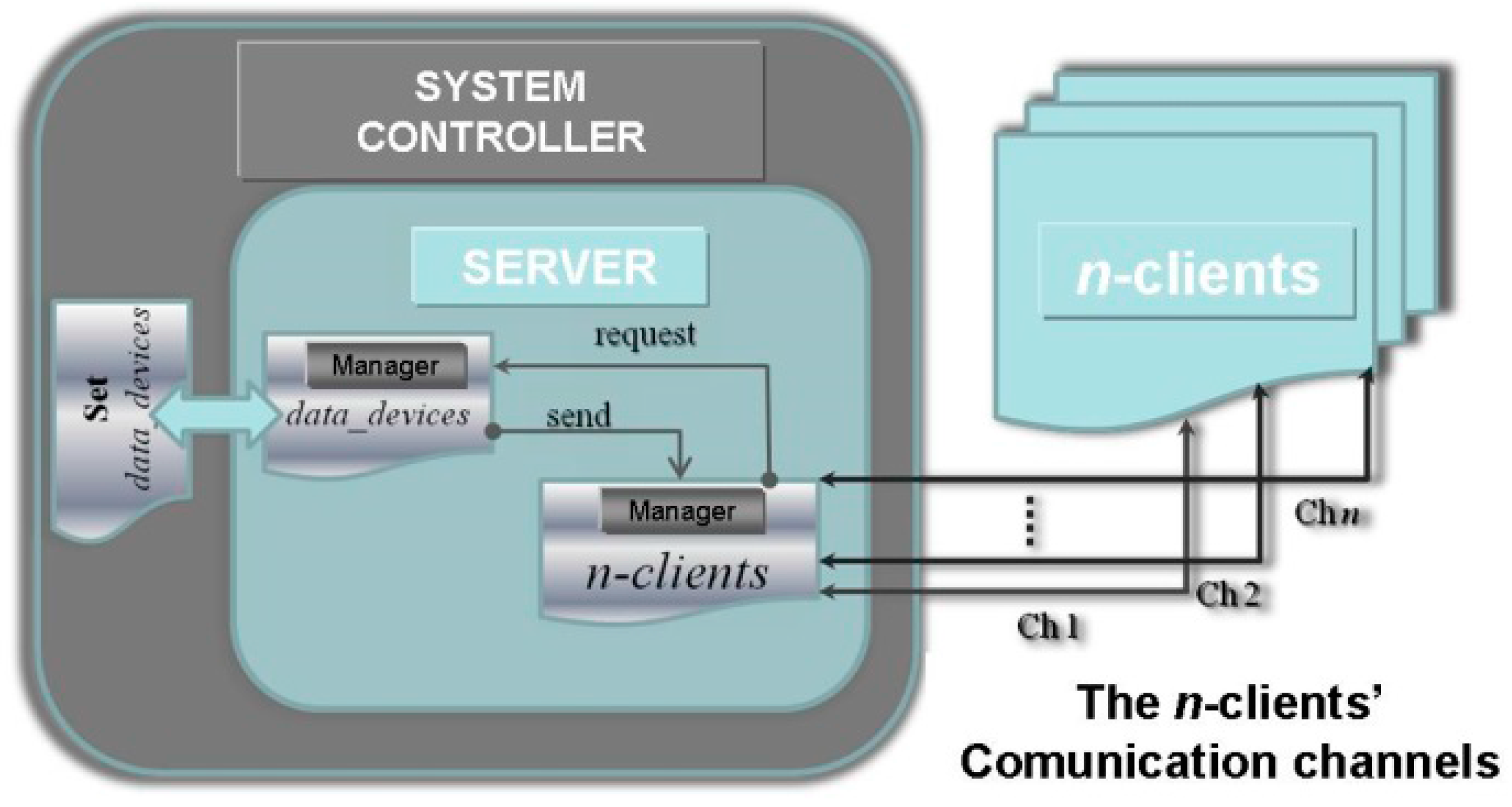
- Multiple and simultaneous clients connection can be accepted.
- Adaptable according to the requirements/configuration of every client.
- Data storage for every testing session.
- The old session can be visualized: offline mode.
- The TCP/IP communication protocol has been used to communicate between the vehicle and the users (researchers).
2.6. System Architecture
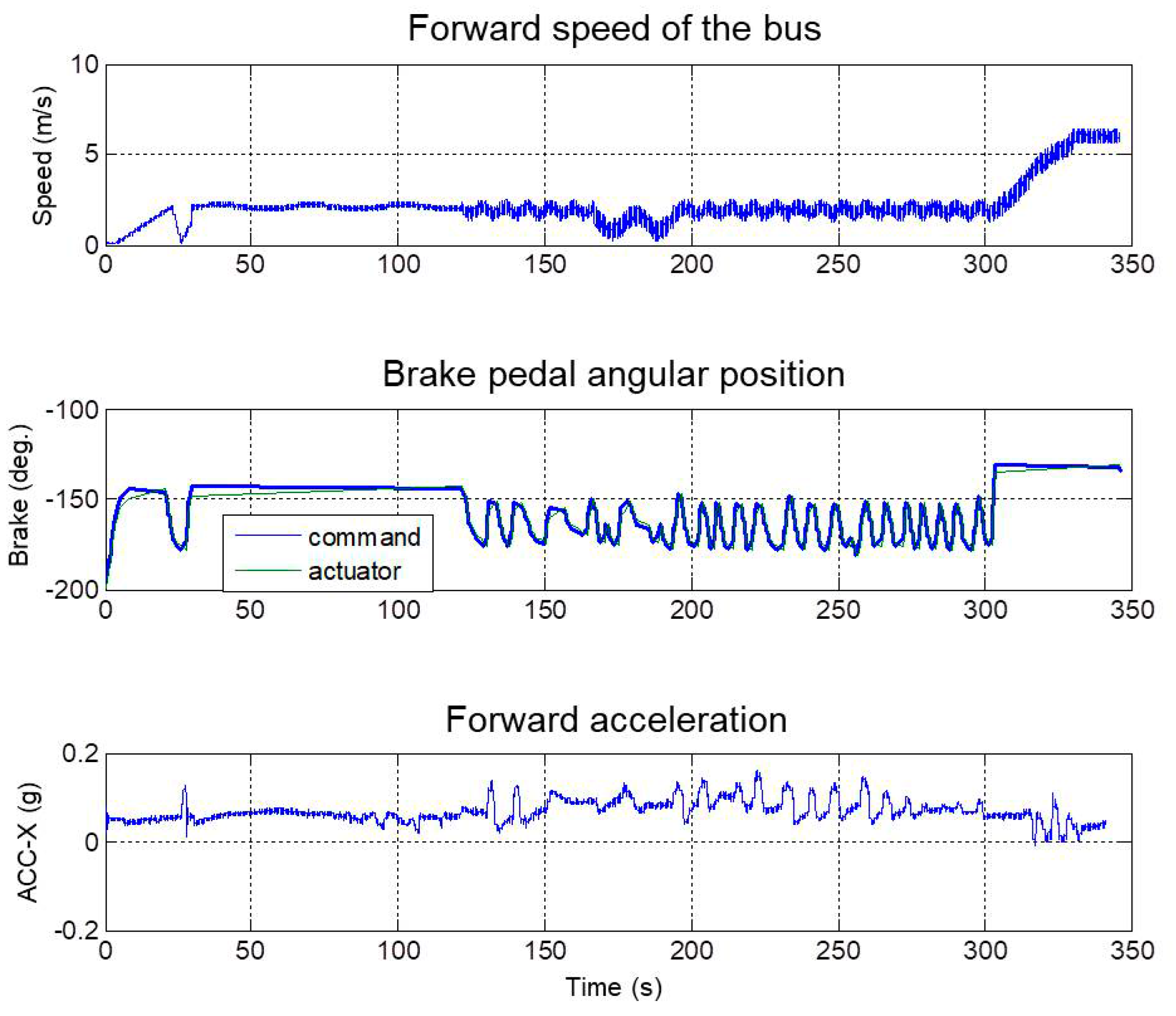
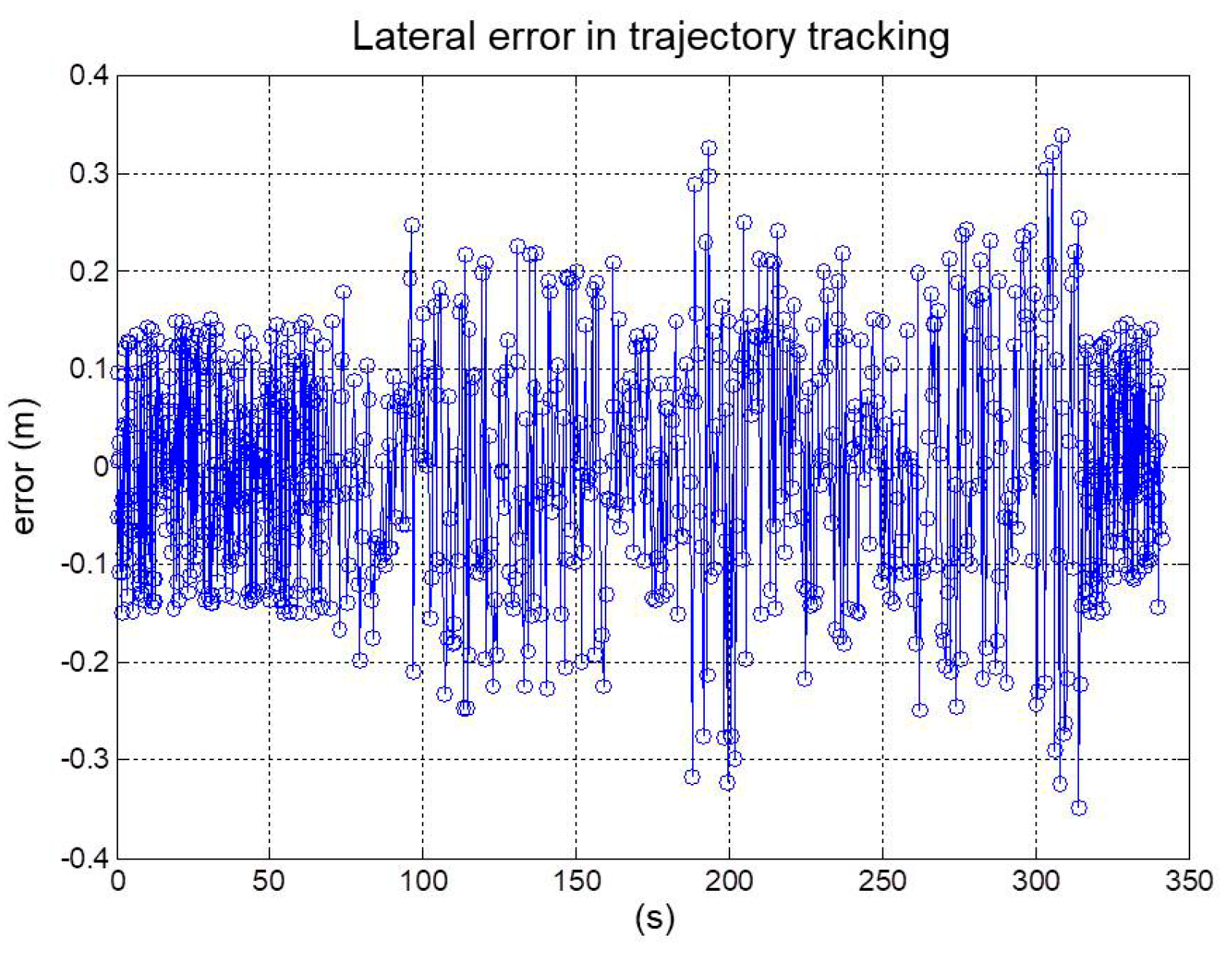
3. Results and Discussion
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Shladover, S.E.; Desoer, C.A.; Hedrick, J.K.; Tomizuka, M.; Walrand, J.; Zhang, W.-B.; McMahon, D.H.; Peng, H.; Sheikholeslam, S.; McKeown, N. Automatic vehicle control developments in the path program. IEEE Trans. Veh. Technol. 1991, 40, 114–130. [Google Scholar] [CrossRef]
- Fenton, R.; Mayhan, R. Automated highway studies at the Ohio State University-an overview. IEEE Trans. Veh. Technol. 1991, 40, 100–113. [Google Scholar] [CrossRef]
- Collier, W.C.; Weiland, R.J. Smart cars-smart highways. IEEE Spectr. 1994, 31, 27–33. [Google Scholar] [CrossRef]
- Stanton, N.A.; Young, M.; McCaulder, B. Drive-by-Wire: The case of driver workload and reclaiming control with adaptive cruise control. Saf. Sci. 1997, 27, 149–159. [Google Scholar] [CrossRef]
- Naranjo, J.E.; González, C.; García, R.; de Pedro, T. Cooperative Throttle and Brake Fuzzy Control for ACC+Stop&Go Maneuvers. IEEE Trans. Veh. Technol. 2007, 56, 1623–1630. [Google Scholar] [CrossRef]
- Naranjo, J.E.; González, C.; García, R.; de Pedro, T. Lane-Change Fuzzy Control in Autonomous Vehicles for the Overtaking Maneuver. IEEE Trans. Intell. Transp. Syst. 2008, 9, 438–450. [Google Scholar] [CrossRef] [Green Version]
- Bishop, R. A survey of intelligent vehicle applications worldwide. In Proceedings of the IEEE Intelligent Vehicles Symposium, Dearborn, MI, USA, 3–5 October 2000; pp. 25–30. [Google Scholar]
- Yoshioka, L.R.; Marte, C.L.; Micoski, M.; Costa, R.D.; Fontana, C.; Sakurai, C.A.; Cardoso, J.R. Bus Corridor Operational Improvement with Intelligent Transportation System based on Autonomous Guidance and Precision Docking. Int. J. Syst. Appl. Eng. Dev. 2014, 8, 116–123. [Google Scholar]
- Hidalgo, D.; Muñoz, J.C. A review of technological improvements in bus rapid transit (BRT) and buses with high level of service (BHLS). Public Transp. 2014, 6, 185–213. [Google Scholar] [CrossRef]
- Mejía-Dugand, S.; Hjelm, O.; Baas, L.; Ríos, R.A. Lessons from the spread of bus rapid transit in Latin America. J. Clean. Prod. 2013, 50, 82–90. [Google Scholar] [CrossRef]
- Zeng, H. China Transportation Briefing: Bus Rapid Transit in China—On the Way. TheCityFix. Available online: http://thecityfix.com/blog/bus-rapid-transit-brt-china-transportation-briefing-series-guangzhou-beijing-heshuang-zeng/ (accessed on 26 October2017).
- Cervero, R.; Dai, D. BRT TOD: Leveraging transit oriented development with bus rapid transit investments. Transp. Policy 2014, 36, 127–138. [Google Scholar] [CrossRef]
- Wright, L.; Hook, W. Introduction. In Bus Rapid Transit Planning Guide, 3rd ed.; Institute of Transportation & Development: New York, NY, USA, 2007; pp. 10–33. [Google Scholar]
- Montes, H.; Salinas, C.; Sarria, J.; Armada, M. An Experimental Platform for Research on Automatic Control of Articulated Bus. In Proceedings of the IARP Workshop on Service Robotics and Nanorobotics, Beijing, China, 28–29 October 2009. [Google Scholar]
- Salinas, C.; Montes, H.; Armada, M. A perception system for accurate automatic control of an articulated bus. In Proceedings of the 13th International Conference of Climbing and Walking Robots, CLAWAR 2010, Nagoya, Japan, 31 August–3 September 2010; pp. 1021–1028. [Google Scholar]
- Le-Anh, T.; De Koster, M.B.M. A review of design and control of automated guided vehicle systems. Eur. J. Oper. Res. 2006, 171, 1–23. [Google Scholar] [CrossRef]
- Ackermann, J.; Guldner, J.; Siegel, W.; Steinhauser, R.; Utkin, V.I. Linear and Nonlinear Controller Design for Robust Automatic Steering. IEEE Trans. Control Syst. Technol. 1995, 3, 132–143. [Google Scholar] [CrossRef]
- Campion, G.; Bastin, G.; D’Andrea-Novel, B. Structural Properties and Classification of Kinematic and Dynamic Models of Wheeled Mobile Robots. IEEE Trans. Robot. Autom. 1996, 12, 47–62. [Google Scholar] [CrossRef]
- Kodagoda, K.R.S.; Wijesoma, W.S.; Teoh, E.K. Fuzzy Speed and Steering Control of an AGV. IEEE Trans. Control Syst. Technol. 2002, 10, 112–120. [Google Scholar] [CrossRef]
- Falcone, P.; Borrelli, F.; Asgari, J.; Tseng, H.E.; Hrovat, D. Predictive Active Steering Control for Autonomous Vehicle Systems. IEEE Trans. Control Syst. Technol. 2007, 15, 566–580. [Google Scholar] [CrossRef]
- Fernández, C.; Domínguez, R.; Fernández-Llorca, D.; Alonso, J.; Sotelo, M.A. Autonomous navigation and obstacle avoidance of a micro-bus. Int. J. Adv. Robot. Syst. 2013, 10, 1–9. [Google Scholar] [CrossRef]
- Fenton, R.; Melocik, G.; Olson, K. On the steering of automated vehicles: Theory and experiment. IEEE Trans. Autom. Control 1976, 21, 306–315. [Google Scholar] [CrossRef]
- Netto, M.S.; Chaib, S.; Mammar, S. Lateral adaptive control for vehicle lane keeping. In Proceedings of the American Control Conference, Boston, MA, USA, 30 June–2 July 2004; pp. 2693–2698. [Google Scholar]
- Mammar, S.; Glaser, S.; Netto, M. Vehicle Lateral Dynamics Estimation using Unknown Input Proportional-Integral Observers. In Proceedings of the American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; pp. 14–16. [Google Scholar]
- Chen, C.; Guldner, J.; Kanellakopoulos, I.; Tomizuka, M. Nonlinear Damping in Vehicle Lateral Control: Theory and Experiment. In Proceedings of the American Control Conference, Philadelphia, PA, USA, 26 June 1998; pp. 2243–2247. [Google Scholar]
- Linderoth, M.; Soltesz, K.; Murray, R.M. Nonlinear Lateral Control Strategy for Nonholonomic Vehicles. In Proceedings of the American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 3219–3224. [Google Scholar]
- DARPA Urban Challenge. Available online: http://archive.darpa.mil/grandchallenge/ (accessed on 6 September 2017).
- Kammel, S.; Ziegler, J.; Pitzer, B.; Werling, M.; Gindele, T.; Jagzent, D.; Schröder, J.; Thuy, M.; Goebl, M.; von Hundelshausen, F.; et al. Team AnnieWAY’s Autonomous System for the 2007 DARPA Urban Challenge. J. Field Robot. 2008, 25, 615–639. [Google Scholar] [CrossRef]
- Sotelo, M.A. Lateral control strategy for autonomous steering of Ackerman-like vehicles. Robot. Auton. Syst. 2003, 45, 223–233. [Google Scholar] [CrossRef]
- Hessburg, T.; Peng, H.; Tomizuka, M.; Zhang, W.B.; Kamei, E. An Experimental Study on Lateral Control of a Vehicle. In Proceedings of the American Control Conference, Boston, MA, USA, 26–28 June 1991; pp. 3084–3089. [Google Scholar]
- Tan, H.S.; Bougler, B. Vehicle Lateral Warning, Guidance and Control Based on Magnetic Markers: PATH Report of AHSRA Smart Cruise 21 Proving Tests. In California Partners for Advanced Transit and Highways (PATH); UC Berkeley: California Partners for Advanced Transportation Technology; UC Berkeley: Berkeley, CA, USA, 2001; pp. 1–71. Available online: http://escholarship.org/uc/item/3jb3r4p5 (accessed on 7 September 2017).
- Xu, H.G.; Wang, C.X.; Yang, R.Q.; Yang, M. Extended Kalman Filter Based Magnetic Guidance for Intelligent Vehicles. In Proceedings of the IEEE Intelligent Vehicles Symposium, Tokyo, Japan, 13–15 June 2006; pp. 169–175. [Google Scholar]
- Chen, C.; Tomizuka, M. Lateral Control of Tractor-Semitrailers for Automated Highway Systems. In California Partners for Advanced Transit and Highways (PATH); UC Berkeley: California Partners for Advanced Transportation Technology; UC Berkeley: Berkeley, CA, USA, 1996; pp. 1–29. Available online: http://escholarship.org/uc/item/5235j21k (accessed on 7 September 2017).
- Hingwe, P.; Wang, J.Y.; Tai, M.; Tomizuka, M. Lateral Control of Heavy Duty Vehicles for Automated Highway System: Experimental Study on a Tractor Semi-trailer. In California Partners for Advanced Transit and Highways (PATH); UC Berkeley: California Partners for Advanced Transportation Technology; UC Berkeley: Berkeley, CA, USA, 2000; pp. 1–47. Available online: http://escholarship.org/uc/item/9jj235kx (accessed on 7 September 2017).
- Tai, M.; Tomizuka, M. Robust Lateral Control of Heavy Duty Vehicles: Final Report. In California Partners for Advanced Transit and Highways (PATH); UC Berkeley: California Partners for Advanced Transportation Technology; UC Berkeley: Berkeley, CA, USA, 2003; pp. 1–80. Available online: http://escholarship.org/uc/item/8j2692w0 (accessed on 7 September 2017).
- Chen, C. Backstepping Design of Nonlinear Systems and Its Application to Vehicle Lateral Control in Automated Highway Systems. Ph.D. Thesis, University of California Berkeley, Berkeley, CA, USA, 1996. [Google Scholar]
- Fernández, R.; Aracil, R.; Armada, M. Control de tracción en robots móviles con ruedas. Rev. Iberoam. Autom. Inf. Ind. 2012, 9, 393–405. [Google Scholar] [CrossRef] [Green Version]
- Kiencke, U.; Daiß, A. Observation of lateral vehicle dynamics. Control Eng. Pract. 1997, 5, 1145–1150. [Google Scholar] [CrossRef]
- Lin, C-F.; Ulsoy, A.G.; LeBlanc, D.J. Vehicle Dynamics and External Disturbance Estimation for Vehicle Path Prediction. IEEE Trans. Control Syst. Technol. 2000, 8, 508–518. [Google Scholar] [CrossRef]
- Gerdes, J.C.; Rossetter, E.J. A unified approach to driver assistance systems based on artificial potential fields. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Nashville, TN, USA, 14–19 November 1999; pp. 431–438. [Google Scholar]
- Talbot, C.M.; Papadimitriou, I.; Tomizuka, M. Fault Tolerant Autonomous Lateral Control for Heavy Vehicles. In California Partners for Advanced Transit and Highways (PATH); UC Berkeley: California Partners for Advanced Transportation Technology; UC Berkeley: Berkeley, CA, USA, 2004; pp. 1–69. Available online: http://escholarship.org/uc/item/7xd2r0cc (accessed on 7 September 2017).
- Mcmahon, D.H.; Hedrick, J.K. Longitudinal Model Development for Automated Roadway Vehicles. In California Partners for Advanced Transit and Highways (PATH); UC Berkeley: California Partners for Advanced Transportation Technology; UC Berkeley: Berkeley, CA, USA, 1989; pp. 1–69. Available online: http://escholarship.org/uc/item/4746j7jj (accessed on 7 September 2017).
- Tan, Y.; Kanellakopoulos, I. Longitudinal Control of Commercial Heavy Vehicles: Experimental Implementation. In California Partners for Advanced Transit and Highways (PATH); UC Berkeley: California Partners for Advanced Transportation Technology; UC Berkeley: Berkeley, CA, USA, 2002; pp. 1–27. Available online: https://trid.trb.org/view.aspx?id=726231 (accessed on 7 September 2017).
- Kim, S.; Song, B.; Song, H. Integrated Fault Detection and Diagnosis System for Longitudinal Control of an Autonomous All-Terrain Vehicle (ATV). Int. J. Autom. Technol. 2009, 10, 505–512. [Google Scholar] [CrossRef]
- Lim, E.H.M.; Hedrick, J.K. Lateral and Longitudinal Vehicle Control Coupling for Automated Vehicle Operation. In Proceedings of the American Control Conference, San Diego, CA, USA, 2–4 June 1999; pp. 3676–3680. [Google Scholar]
- Tan, H.S.; Huang, J. Design of a high-performance automatic steering controller for bus revenue service based on how drivers steer. IEEE Trans. Robot. 2014, 30, 1137–1147. [Google Scholar] [CrossRef]
- Huang, J.; Tan, H.S. Control System Design of an Automated Bus in Revenue Service. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2868–2878. [Google Scholar] [CrossRef]
- Lefèvre, S.; Carvalho, A.; Borrelli, F. A learning-based framework for velocity control in autonomous driving. IEEE Trans. Autom. Sci. Eng. 2016, 13, 32–42. [Google Scholar] [CrossRef]
- Justino, J.C.; da Silva, L.A.; Rocha, A.; Cardoso Filho, B.D.J. Aspects of the operation of regular ultra fast charging e-Bus in high grade BRT routes. In Proceedings of the IECON 40th Annual Conference of the IEEE Industrial Electronics Society, Dallas, TX, USA, 29 October–1 November 2014; pp. 3101–3107. [Google Scholar]
- Baber, J.; Kolodko, J.; Noël, T.; Parent, M.; Vlacic, L. Cooperative Autonomous Driving. Intelligent Vehicles Sharing City Roads. IEEE Robot. Autom. Mag. 2005, 12, 44–49. [Google Scholar] [CrossRef]
- Jiménez, F.; Clavijo, M.; Naranjo, J.E.; Gómez, O. Improving the Lane Reference Detection for Autonomous Road Vehicle Control. J. Sens. 2016, 2016. [Google Scholar] [CrossRef]
- González, D.; Pérez, J.; Milanés, V. Parametric-based path generation for automated vehicles at roundabouts. Exp. Syst. Appl. 2017, 71, 332–341. [Google Scholar] [CrossRef]
- Szadeczky-Kardoss, E.; Kiss, B. Path planning and tracking control for an automatic parking assist system. In European Robotics Symposium 2008; Springer Tracts in Advanced Robotics; Bruyninckx, H., Přeučil, L., Kulich, M., Eds.; Springer: Berlin, Germany, 2008; Volume 44, pp. 175–184. ISBN 978-3-540-78315-2. [Google Scholar]
- Naranjo, J.E.; González, C.; Reviejo, J.; Garcia, R.; de Pedro, T. Adaptive fuzzy control for inter-vehicle gap keeping. IEEE Trans. Intell. Transp. Syst. 2003, 4, 132–142. [Google Scholar] [CrossRef] [Green Version]
- Naranjo, J.E.; González, C.; García, R.; de Pedro, T. ACC + Stop&go maneuvers with throttle and brake fuzzy control. IEEE Trans. Intell. Transp. Syst. 2006, 7, 213–225. [Google Scholar] [CrossRef]
- Naranjo, J.E.; Sotelo, M.A.; González, C.; García, R.; de Pedro, T. Using Fuzzy Logic in Automated Vehicle Control. IEEE Intell. Syst. 2007, 22, 36–45. [Google Scholar] [CrossRef]
- Villalon-Sepulveda, G.; Torres-Torriti, M.; Flores-Calero, M. Traffic sign detection system for locating road intersections and braking advance. Rev. Iberoam. Autom. Inf. Ind. 2017, 14, 152–162. [Google Scholar] [CrossRef]
- Fernandez, A.; Usamentiaga, R.; Casado, R. Automatic System to Detect Both Distraction and Drowsiness in Drivers Using Robust Visual Features. Rev. Iberoam. Autom. Inf. Ind. 2017, 14, 307–328. [Google Scholar] [CrossRef]
- Salinas, C.; Montes, H.; Fernandez, G.; Gonzalez de Santos, P.; Armada, M. Catadioptric Panoramic Stereovision for Humanoid Robots. Robotica 2012, 30, 799–811. [Google Scholar] [CrossRef]
- Fernández, R.; Salinas, C.; Montes, H.; Armada, M. Omnidirectional stereo tracking system for humanitarian demining training. In Proceedings of the 8th International Symposium “Humanitarian Demining 2011”, Šibenik, Croacia, 26–28 April 2011; pp. 113–116. [Google Scholar]
- Salinas, C. A Non-Feature Based Method for Automatic Image Registration Relying on Depth Dependent Planar Projective Transformations. Ph.D. Thesis, Universidad Complutense de Madrid, Madrid, Spain, 2015. [Google Scholar]
- Li, Y.; Ruichek, Y.; Cappelle, C. 3D triangulation based extrinsic calibration between a stereo vision system and a LIDAR. In Proceedings of the 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 797–802. [Google Scholar]
- Mozos, O.M. Semantic Place Labeling with Mobile Robots; Springer Tracts in Advanced Robotics (STAR); Springer: Berlin, Germany, 2010; ISBN 978-3-642-11209-6. [Google Scholar]
- QNX® Software System Ltd. QNX 6.4. 2008. Available online: http://www.qnx.com/download/ (accessed on 15 September 2017).
- The MathWorks. Matlab®. 2013. Available online: https://es.mathworks.com/ (accessed on 15 September 2017).
- FORTUNE. Available online: http://fortune.com/2016/12/13/google-self-driving-car-waymo-alphabet/ (accessed on 13 October 2017).
- TESLA. Available online: https://www.tesla.com/ (accessed on 13 October 2017).
- OLLI. Available online: http://meetolli.auto (accessed on 13 October 2017).
- OTTO. Available online: https://www.ottomotors.com/ (accessed on 13 October 2017).
- Alessandrini, A.; Cattivera, A.; Holguin, C.; Stam, D. CityMobil2: Challenges and Opportunities of Fully Automated Mobility. In Road Vehicle Automation; Meyer, G., Beiker, S., Eds.; Springer: Cham, Switzerland, 2014; pp. 169–184. ISBN 978-3-319-05989-1. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instrument | Function | Model |
|---|---|---|
| Sensors | Incremental and absolute optical encoders | HEDS 550X; Industrial encoder DH05 |
| Proximity sensors | NBB2-12GM50-E0-V1, E2EL cylindrical proximity sensor | |
| Velocity measurement system (magnetic pick-up) | KATLAX M18 Digital magnetic pick-up sensor | |
| Inertial Measurement Units (IMUs) (MEMS inertial sensor with three accelerometers) and high precision IMU | MEMS inertial sensor LIS3LO2AL IMU440CA | |
| Catadioptric omnidirectional stereovision system (with CCD RGB cameras) | Ueye UI-1485LE-C/M, resolution 2560 × 1920 pixels | |
| LIDAR systems (IP67, statistical error 5 mm, angular resolution 0.25°, range 80 m, view angle 180°) | SICK LMS221, LMS291 | |
| GPS for localization and tracking | TRIMBLE 5700 | |
| Magnetometer systems for magnetic markers detection | Honeywell HMC1501 | |
| Actuators | DC motor for steering wheel control | MAXON 24-volt DC motor (150 watts) with a gearbox (74:1) and encoder |
| DC motor for brake control | MAXON 24-volt DC motor (70 watts) with gearbox (74:1) and encoder | |
| Computing and control | Telemetry System | PCL-818, 16 I/O channels multifunction board Wireless-G Ethernet Bridge Wireless access point (WAP54G) |
| On-board computers | Industrial PCs running QNX RTOS | |
| DC motors microcontroller-based control boards | CM3 and CM4, proprietary CSIC control boards |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Montes, H.; Salinas, C.; Fernández, R.; Armada, M. An Experimental Platform for Autonomous Bus Development. Appl. Sci. 2017, 7, 1131. https://doi.org/10.3390/app7111131
Montes H, Salinas C, Fernández R, Armada M. An Experimental Platform for Autonomous Bus Development. Applied Sciences. 2017; 7(11):1131. https://doi.org/10.3390/app7111131
Chicago/Turabian StyleMontes, Héctor, Carlota Salinas, Roemi Fernández, and Manuel Armada. 2017. "An Experimental Platform for Autonomous Bus Development" Applied Sciences 7, no. 11: 1131. https://doi.org/10.3390/app7111131
APA StyleMontes, H., Salinas, C., Fernández, R., & Armada, M. (2017). An Experimental Platform for Autonomous Bus Development. Applied Sciences, 7(11), 1131. https://doi.org/10.3390/app7111131