Backstepping Based Formation Control of Quadrotors with the State Transformation Technique


Abstract
:1. Introduction
2. Dynamic Model of a Quadrotor
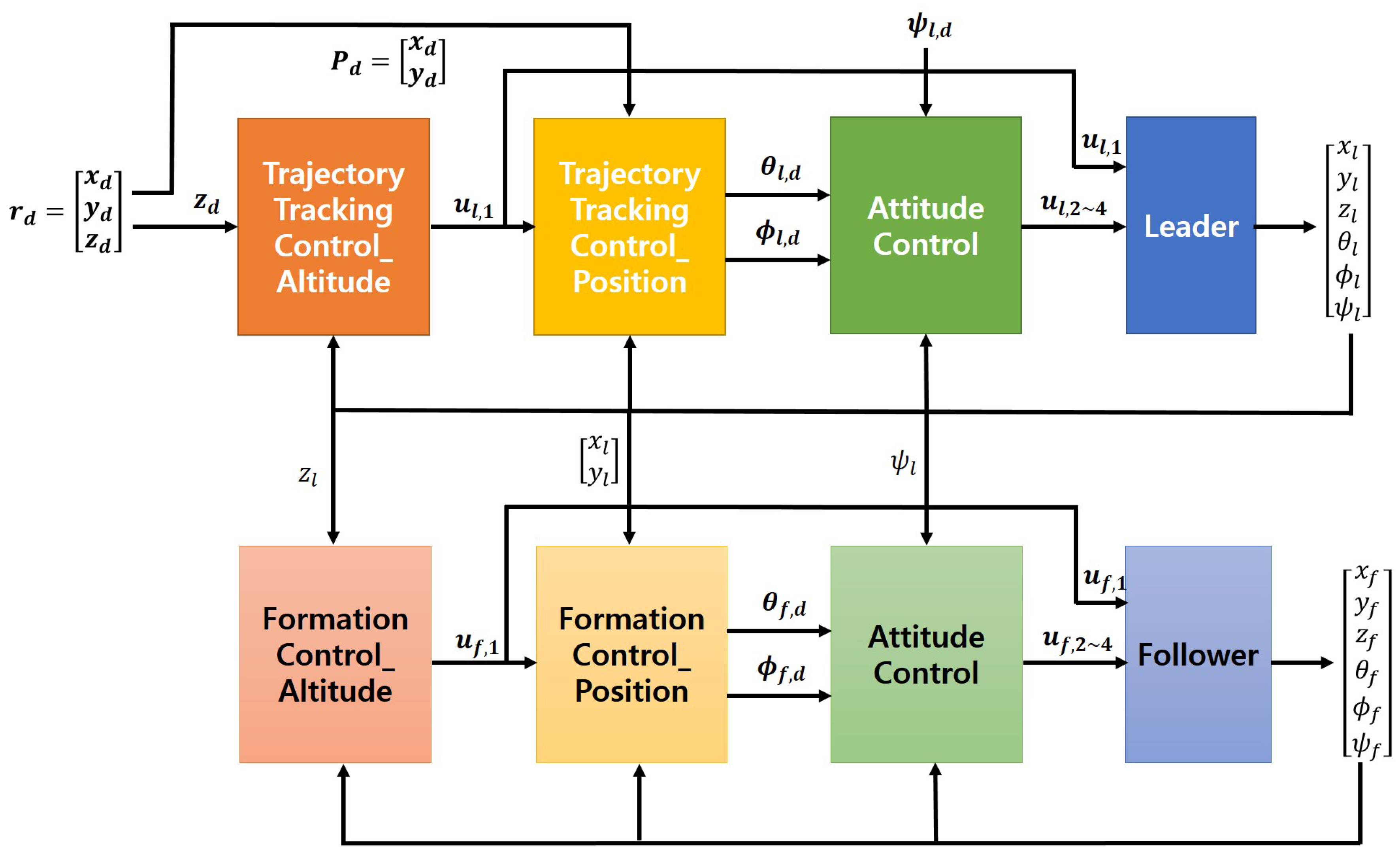
3. Backstepping-Based Quadrotor Formation Control
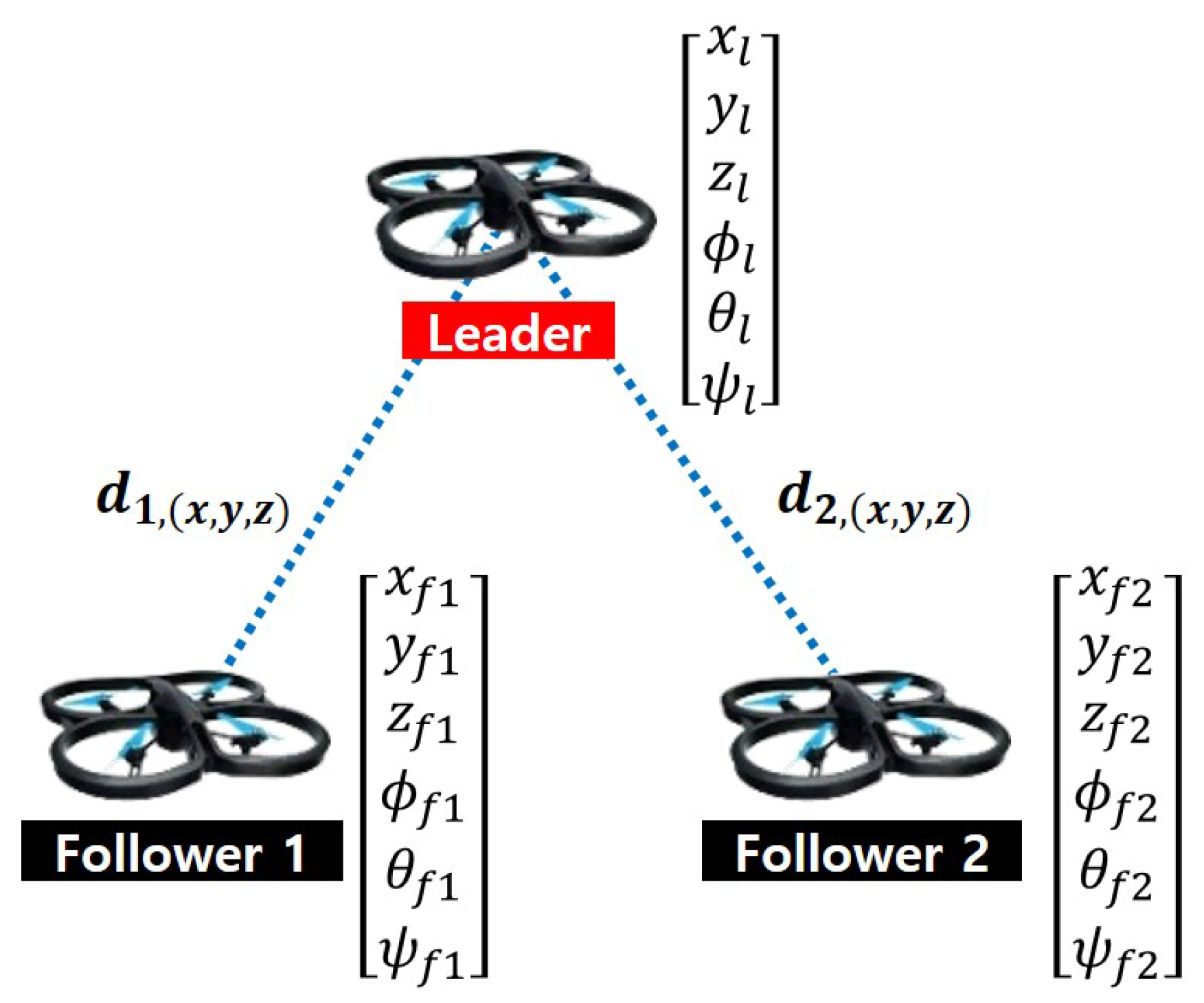
3.1. Leader-Follower Formation Control
3.2. Altitude Control of a Quadrotor
3.3. Position Control of a Quadrotor with the State Transformation Technique
3.4. Attitude Control of a Quadrotor
4. Simulation Results and Analysis
4.1. Simulation Environment Settings
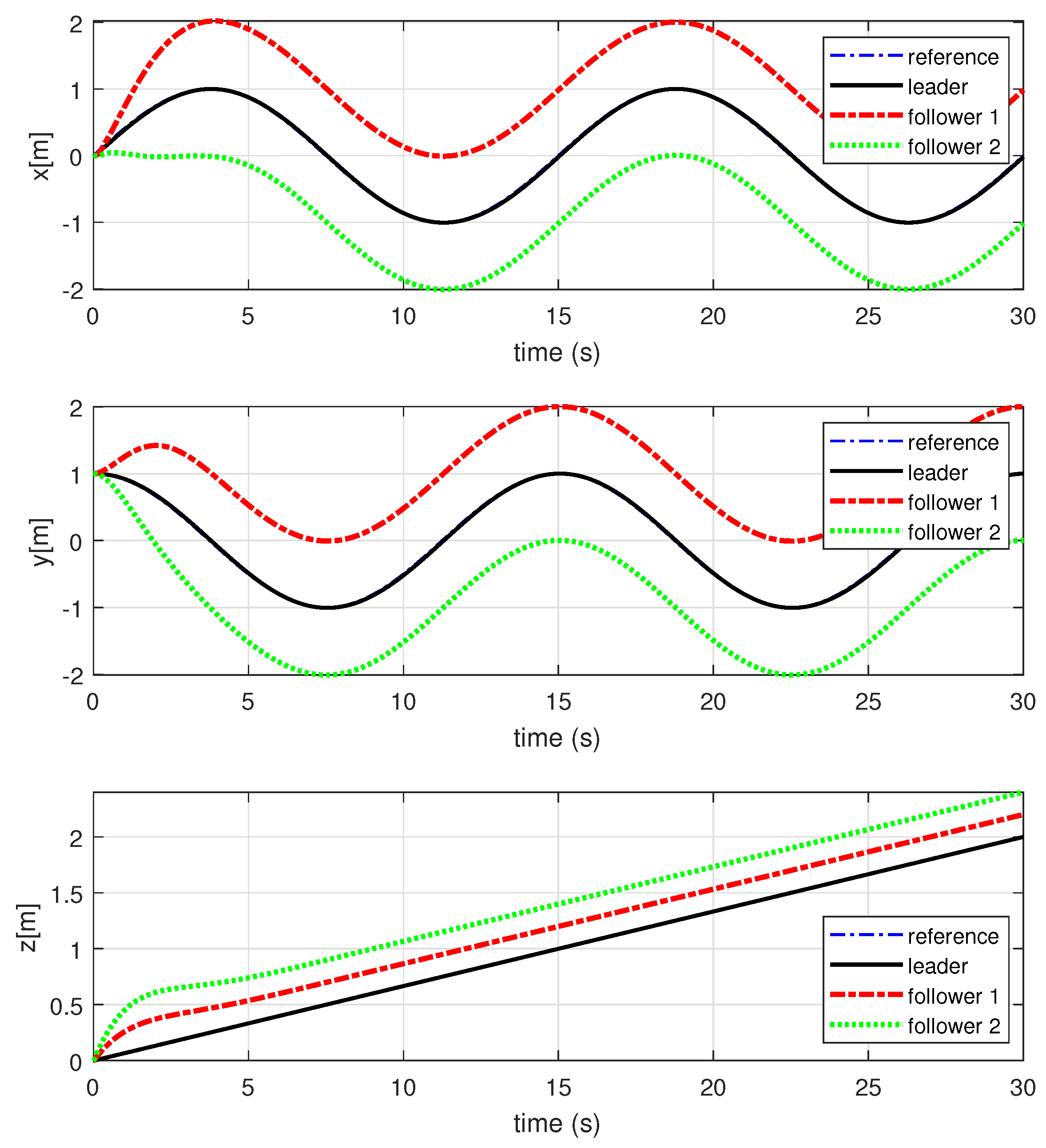
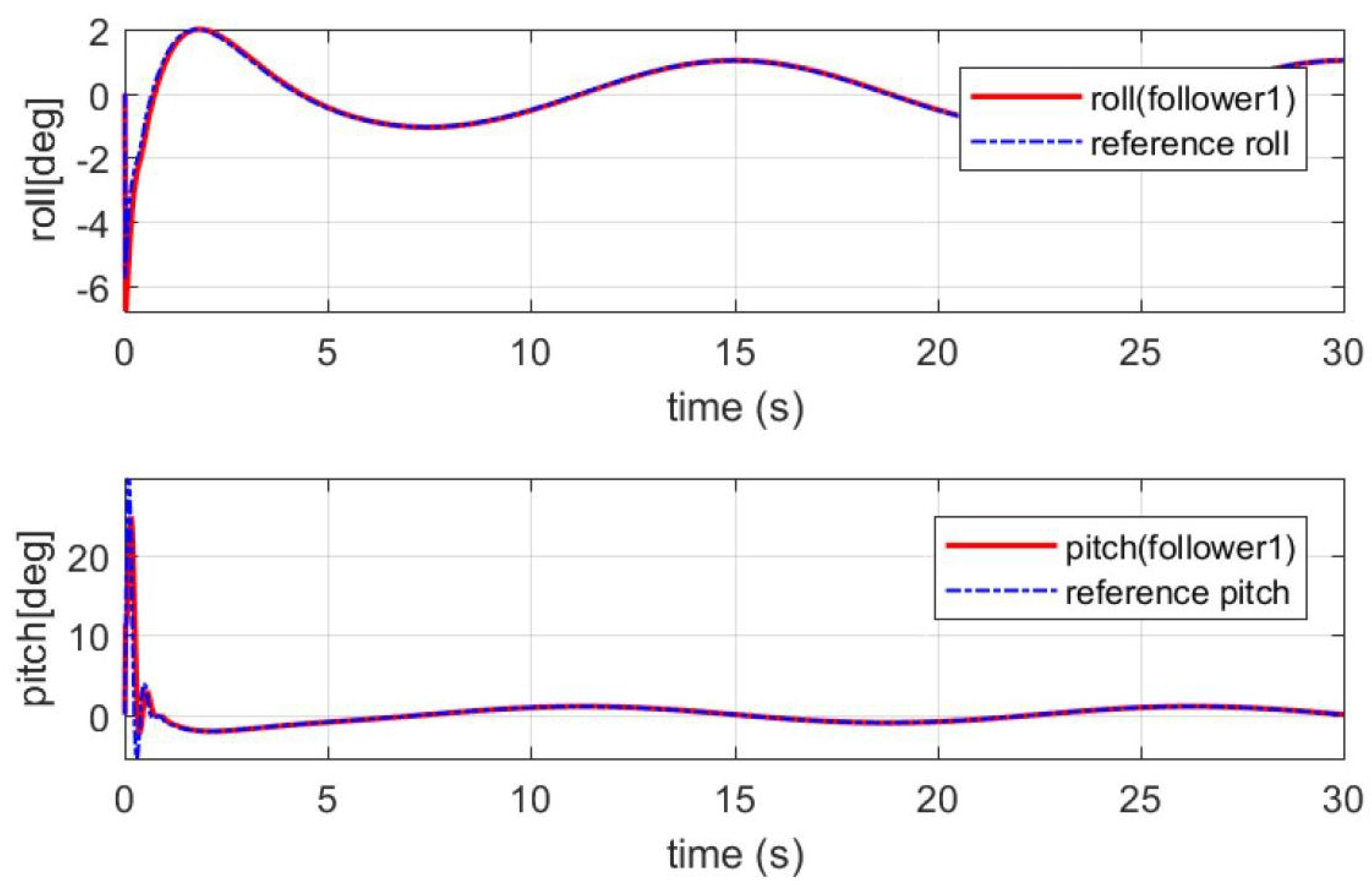
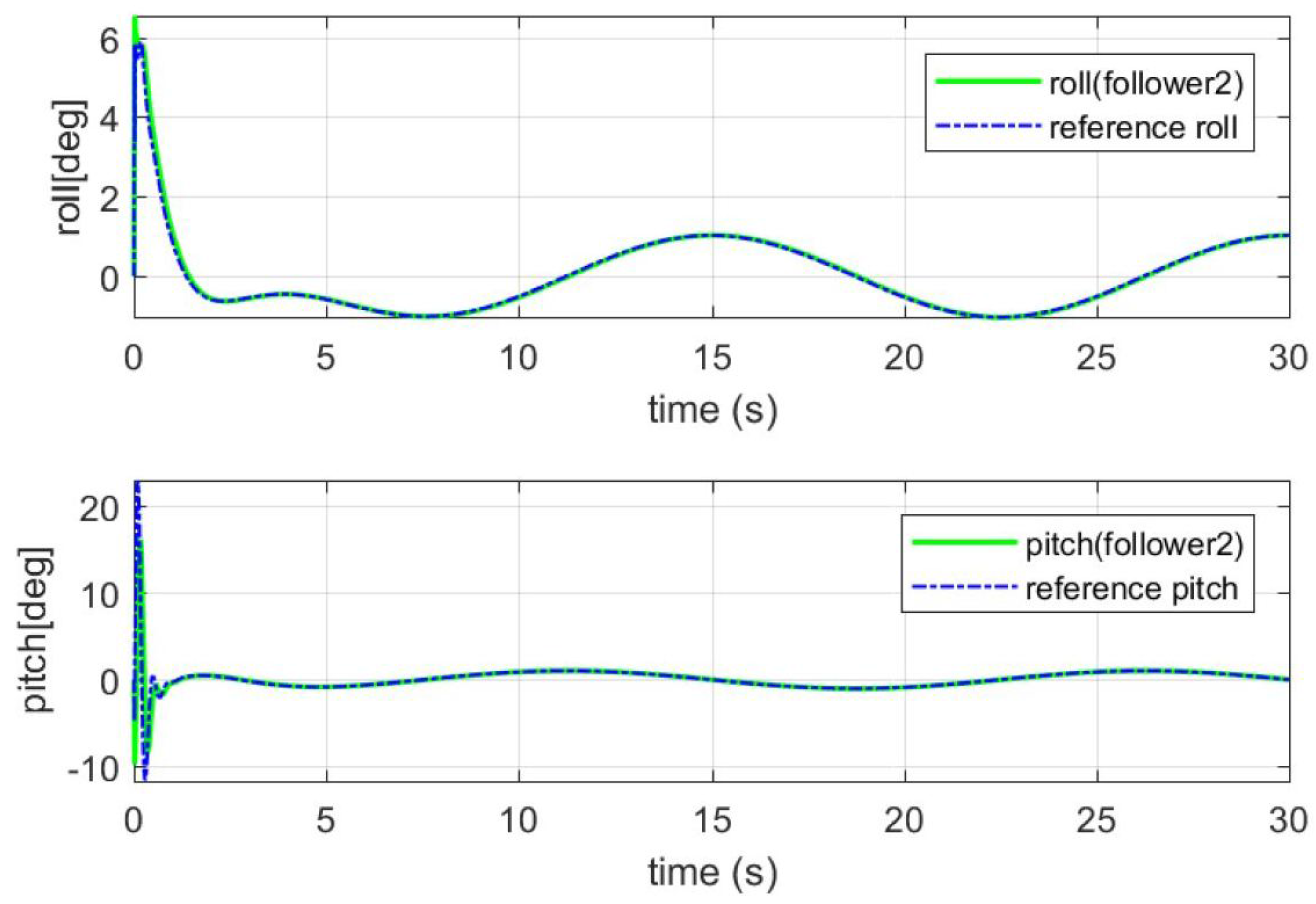
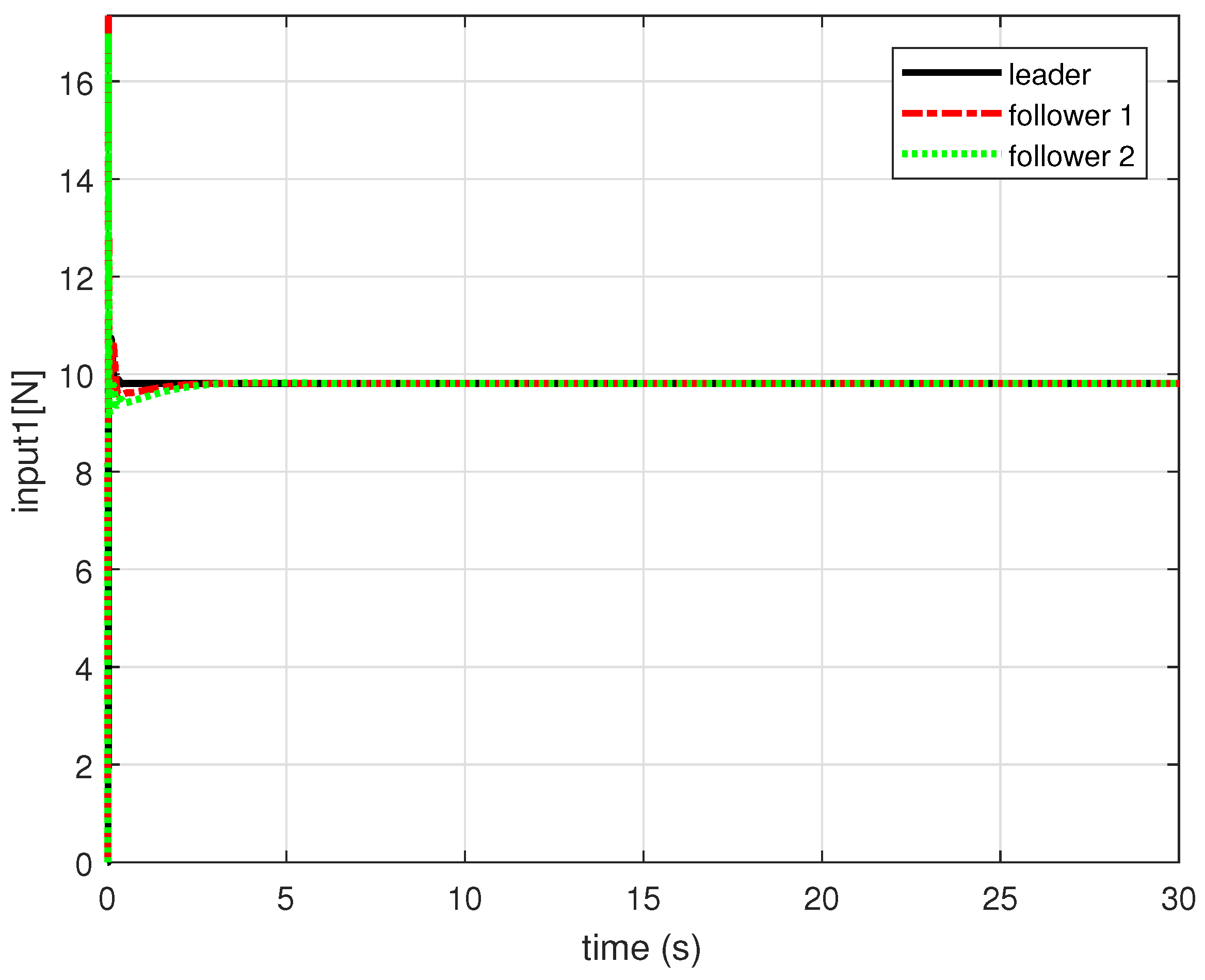
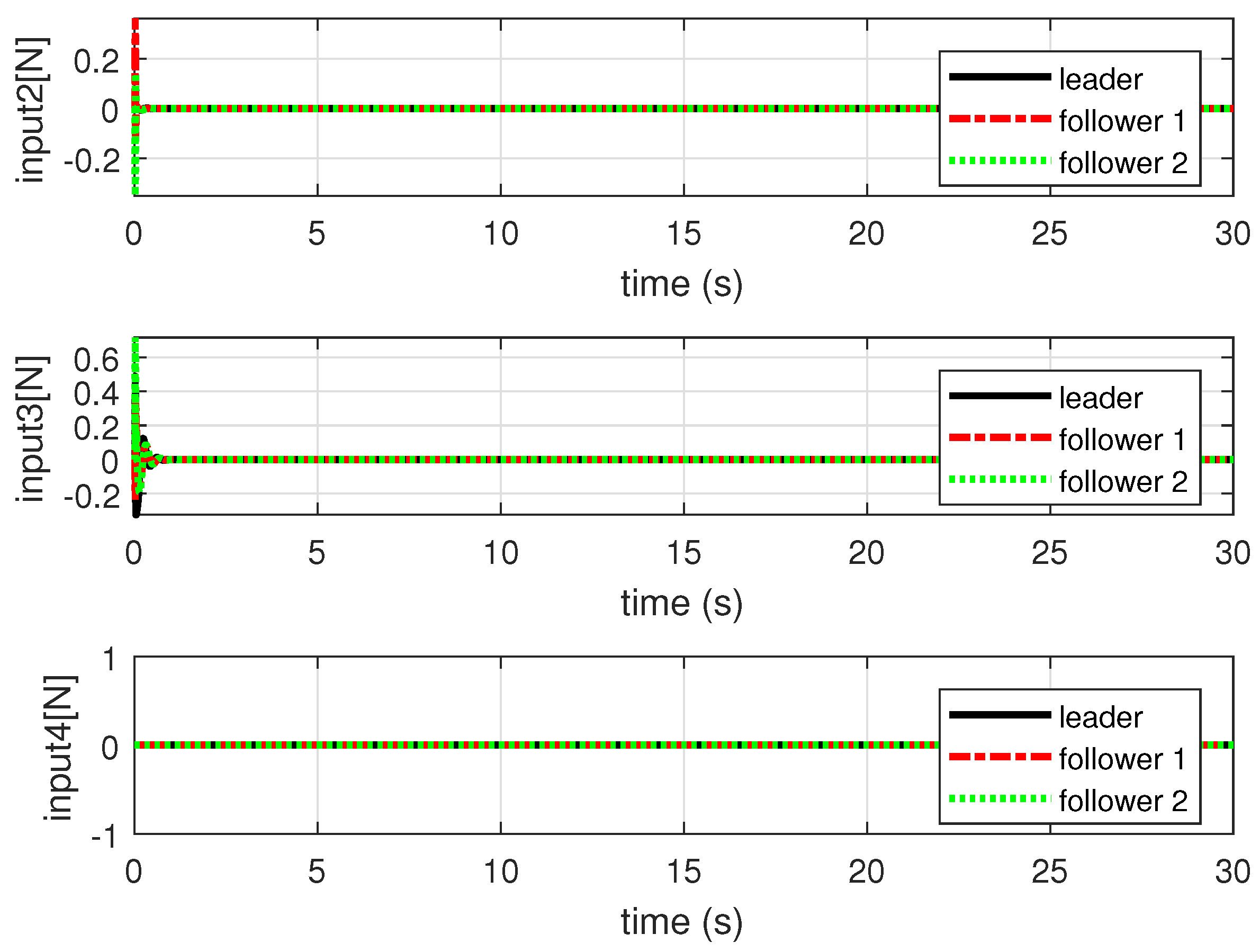
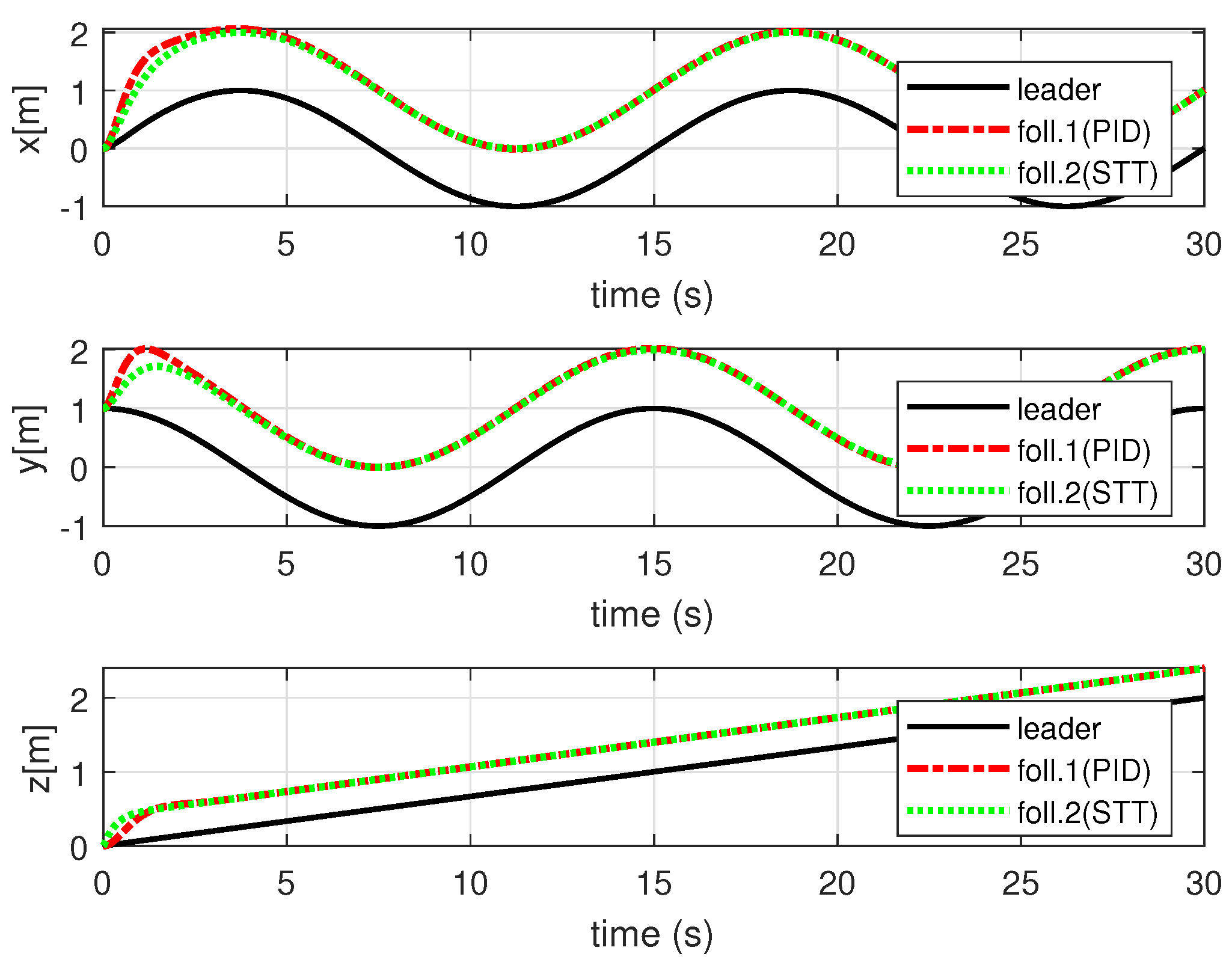
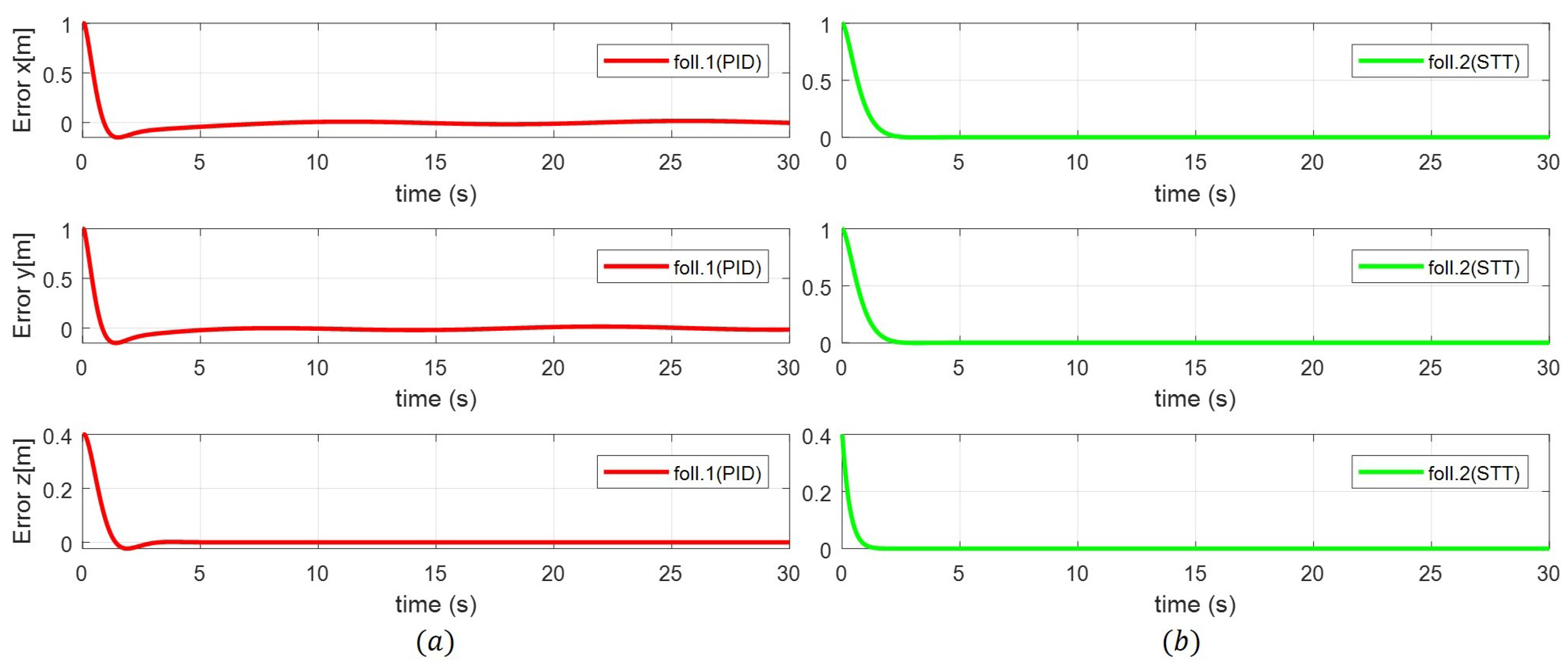
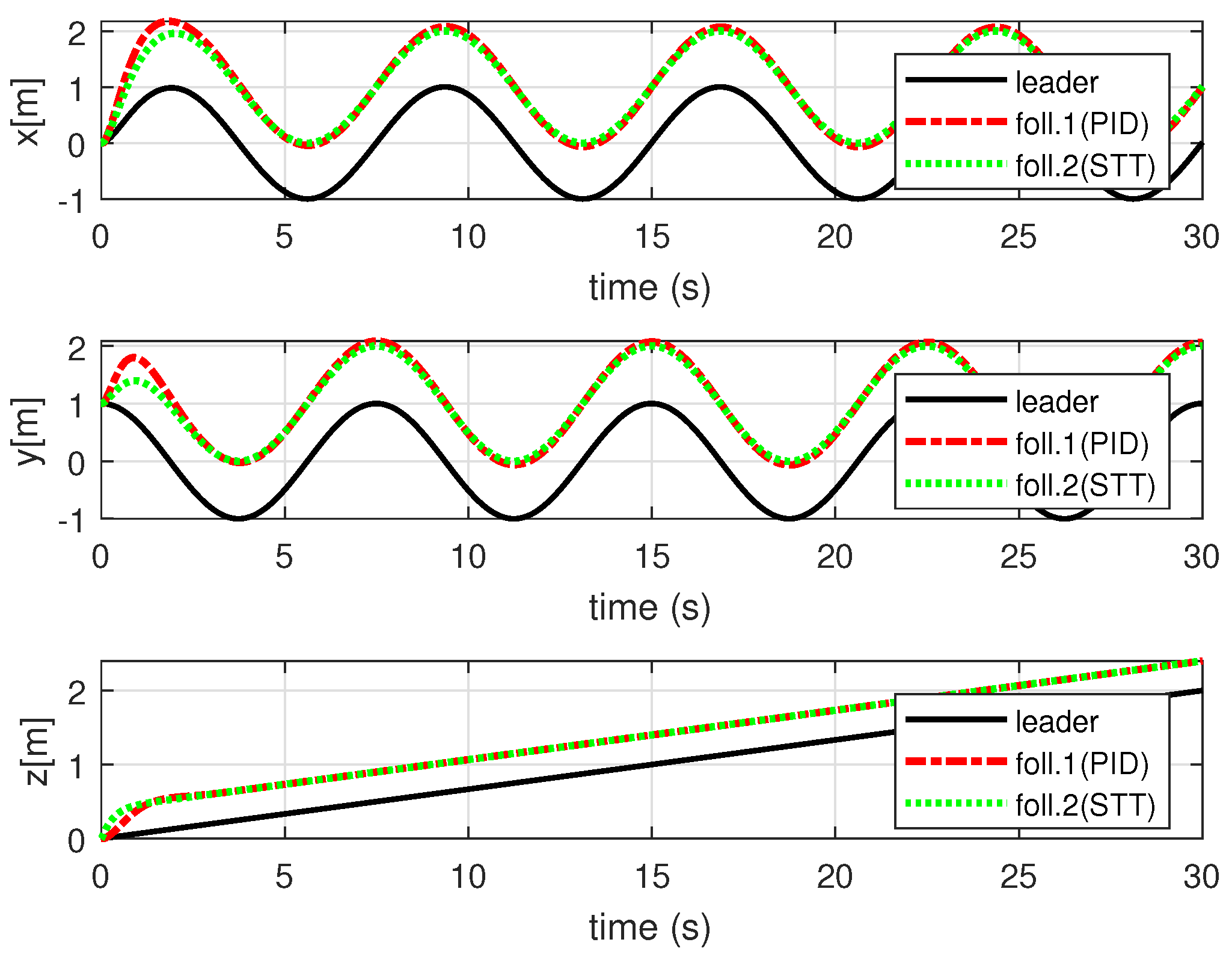
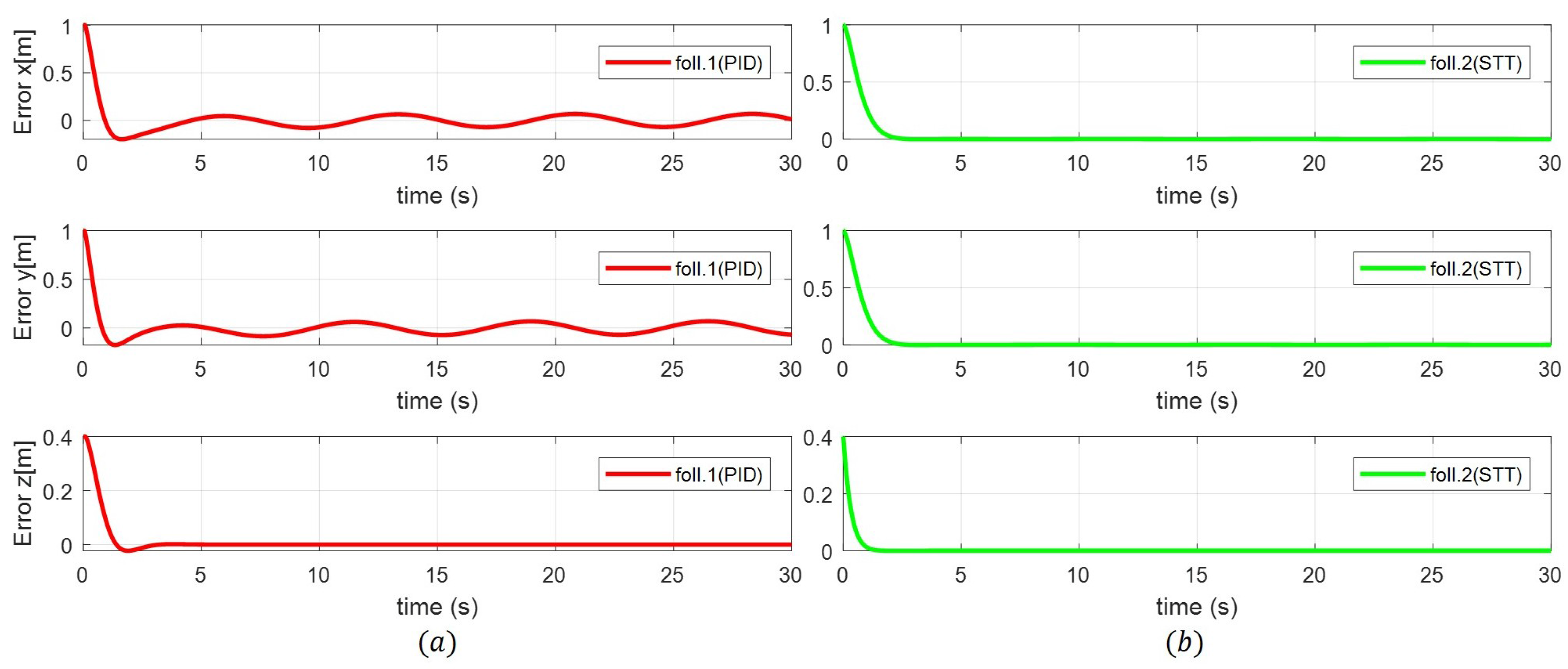
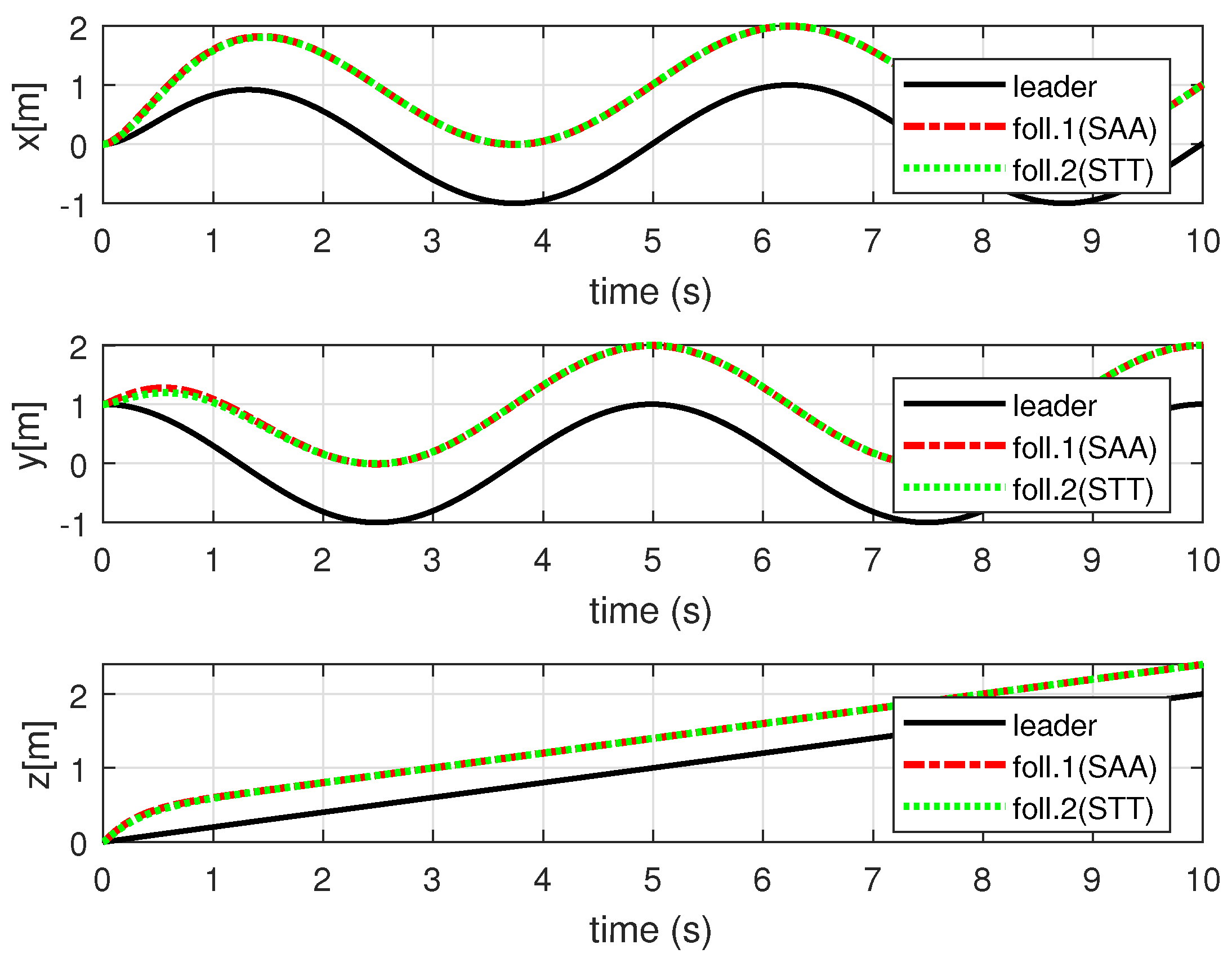
4.2. Simulation Results and Analysis
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Sharma, R.K.; Ghose, D. Collision avoidance between UAV clusters using swarm intelligence techniques. Int. J. Syst. Sci. 2009, 40, 521–538. [Google Scholar] [CrossRef]
- Rinaldi, F.; Chiesa, S.; Quagliotti, F. Linear quadratic control for quadrotors UAVs dynamics and formation flight. J. Intell. Robot. Syst. 2013, 70, 203–220. [Google Scholar] [CrossRef]
- Mercado, D.A.; Castro, R.; Lozano, R. Quadrotors flight formation control using a leader-follower approach. In Proceedings of the 2013 European Control Conference (ECC), Zürich, Switzerland, 17–19 July 2013; pp. 3858–3863. [Google Scholar]
- Davidi, A.; Berman, N.; Arogeti, S. Formation flight using multiple integral backstepping controllers. In Proceedings of the 2011 IEEE 5th International Conference on Cybernetics and Intelligent Systems (CIS), Qingdao, China, 17–19 September 2011; pp. 317–322. [Google Scholar]
- Wu, F.; Chen, J.; Liang, Y. Leader-Follower Formation Control for Quadrotors. IOP Conf. Ser. Mater. Sci. Eng. 2017, 187, 1–8. [Google Scholar] [CrossRef]
- Guerrero, J.A.; Castillo, P.; Salazar, S.; Lozano, R. Mini Rotorcraft Flight Formation Control Using Bounded Inputs. J. Intell. Robot. Syst. 2012, 65, 175–186. [Google Scholar] [CrossRef]
- Kotov, K.Y.; Mal’tsev, A.S.; Nesterov, A.A.; Sobolev, M.A.; Yan, A.P. Decentralized control of quadrotors in a leader–follower formation. Optoelectron. Instrum. Data Process. 2017, 53, 21–25. [Google Scholar] [CrossRef]
- Roldão, V.; Cunha, R.; Cabecinhas, D.; Silvestre, C.; Oliveira, P. A leader-following trajectory generator with application to quadrotor formation flight. Robot. Auton. Syst. 2014, 62, 1597–1609. [Google Scholar] [CrossRef]
- Bayezit, I.; Fidan, B. Distributed cohesive motion control of flight vehicle formations. IEEE Trans. Ind. Electron. 2013, 60, 5763–5772. [Google Scholar] [CrossRef]
- Kushleyev, A.; Mellinger, D.; Kumar, V. Towards a swarm of agile micro quadrotors. Auton. Robot. 2012, 35, 287–300. [Google Scholar] [CrossRef]
- Abdessameud, A.; Tayebi, A. Formation control of VTOL unmanned aerial vehicles with communication delays. Automatica 2011, 47, 2383–2394. [Google Scholar] [CrossRef]
- Dong, X.; Yu, B.; Shi, Z.; Zhong, Y. Time-varying formation control for unmanned aerial vehicles: Theories and applications. IEEE Trans. Control Syst. Technol. 2015, 23, 340–348. [Google Scholar] [CrossRef]
- Guerrero, J.A.; Castillo, P.; Challal, Y. Quadrotors Formation Control: A Wireless Medium Access Aware Approach. J. Intell. Robot. Syst. 2013, 70, 221–231. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, Q.; Wang, Y. Distributed cooperative control for multiple quadrotor systems via dynamic surface control. Nonlinear Dyn. 2014, 75, 513–527. [Google Scholar] [CrossRef]
- Defoort, M.; Floquet, T.; Kokosy, A.; Perruquetti, W. Sliding-Mode Formation Control for Cooperative Autonomous Mobile Robots. IEEE Trans. Ind. Electron. 2008, 55, 3944–3953. [Google Scholar] [CrossRef]
- Erginer, B.; Altug, E. Modeling and PD Control of a Quadrotor VTOL Vehicle. In Proceedings of the 2007 IEEE Intelligent Vehicles Symposium, Istanbul, Turkey, 13–15 June 2007; pp. 894–899. [Google Scholar]
- Oner, K.; Cetinsoy, E.; Unel, M.; Aksit, M.; Kandemir, I.; Gulez, K. Dynamic Model and Control of a New Quadrotor UAV with Tilt-wing Mechanism. IJMME 2008, 2, 12–17. [Google Scholar]
- Gong, X.; Hou, Z.C.; Zhao, C.J.; Bai, Y.; Tian, Y.T. Adaptive Backstepping Sliding Mode Trajectory Tracking Control for a Quadrotor. Int. J. Autom. Comput. 2012, 9, 555–560. [Google Scholar] [CrossRef]
- Huang, M.; Xian, B.; Diao, C.; Yang, K.; Feng, Y. Adaptive Tracking Control of Underactuated Quadrotor Unmanned Aerial Vehicles via Backstepping. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 2076–2081. [Google Scholar]
- Bouabdallah, S.; Siegwart, R. Full control of a quadrotor. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 153–158. [Google Scholar]
- Das, A.; Lewis, F.; Subbarao, K. Backstepping Approach for Controlling a Quadrotor Using Lagrange Form Dynamics. J. Intell. Robot. Syst. 2009, 56, 127–151. [Google Scholar] [CrossRef]
- Raffo, G.V.; Ortega, M.G.; Rubio, F.R. Backstepping/Nonlinear H∞ Control for Path Tracking of a QuadRotor Unmanned Aerial Vehicle. In Proceedings of the 2008 American Control Conference, Seattle, DC, USA, 11–13 June 2008; pp. 3356–3361. [Google Scholar]
- Altug, E.; Ostrowski, J.P.; Mahony, R. Control of a Quadrotor Helicopter Using Visual Feedback. In Proceedings of the 2002 IEEE International Conference on Robotics & Automation, Washington, DC, USA, 11–15 May 2002; pp. 72–77. [Google Scholar]
- Mian, A.A.; Daobo, W. Modeling and Backstepping-based Nonlinear Control Strategy for a 6 DOF Quadrotor Helicopter. Chin. J. Aeronaut. 2008, 21, 261–268. [Google Scholar] [CrossRef]
- Heriberto, R.R.; Vicente, P.V.; Anand, S.O.; Octavio, G.S. Robust Backstepping Control Based on Integral Sliding Modes for Tracking of Quadrotors. J. Intell. Robot. Syst. 2014, 73, 51–66. [Google Scholar]
- Madani, T.; Benallegue, A. Sliding Mode Observer and Backstepping Control for a Quadrotor Unmanned Aerial Vehicles. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 11–13 July 2007; pp. 5887–5892. [Google Scholar]
- Zuo, Z. Trajectory tracking control design with command-filtered compensation for a quadrotor. IET Control Theory Appl. 2010, 4, 2343–2355. [Google Scholar] [CrossRef]
- Gong, X.; Bai, Y.; Peng, C.; Zhao, C.; Tian, Y. Trajectory Tracking Control of a Quad-rotor UAV Based on Command Filtered Backstepping. In Proceedings of the 2012 Third International Conference on Intelligent Control and Information Processing, Dalian, China, 15–17 July 2012; pp. 179–184. [Google Scholar]
- Lee, D.W.; Kim, H.J.; Sastry, S. Feedback Linearization vs. Adaptive Sliding Mode Control for a Quadrotor Helicopter. Int. J. Control Autom. Syst. 2009, 7, 419–428. [Google Scholar] [CrossRef]
- Xie, H.; Lynch, A.F. Input Saturated Visual Servoing for Unmanned Aerial Vehicles. IEEE/ASME Trans. Mech. 2017, 22, 952–960. [Google Scholar] [CrossRef]
- Khalil, H. Nonlinear Systems, 3rd ed.; Prentice Hall: New York, NY, USA, 2002. [Google Scholar]
- Bouabdallah, S.; Noth, A.; Siegwart, R. PID vs. LQ control techniques applied to an indoor micro quadrotor. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems, Sendai, Japan, 28 September–2 October 2004; pp. 2451–2456. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value (Unit) |
|---|---|
| m | 1.0 (kg) |
| g | 9.806 (m/s) |
| 2.3 × 10 (kg · m) | |
| 2.3 × 10 (kg · m) | |
| 5.09 × 10 (kg · m) | |
| J | 6.5 × 10 (kg · m) |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, K.U.; Choi, Y.H.; Park, J.B. Backstepping Based Formation Control of Quadrotors with the State Transformation Technique. Appl. Sci. 2017, 7, 1170. https://doi.org/10.3390/app7111170
Lee KU, Choi YH, Park JB. Backstepping Based Formation Control of Quadrotors with the State Transformation Technique. Applied Sciences. 2017; 7(11):1170. https://doi.org/10.3390/app7111170
Chicago/Turabian StyleLee, Keun Uk, Yoon Ho Choi, and Jin Bae Park. 2017. "Backstepping Based Formation Control of Quadrotors with the State Transformation Technique" Applied Sciences 7, no. 11: 1170. https://doi.org/10.3390/app7111170
APA StyleLee, K. U., Choi, Y. H., & Park, J. B. (2017). Backstepping Based Formation Control of Quadrotors with the State Transformation Technique. Applied Sciences, 7(11), 1170. https://doi.org/10.3390/app7111170