Cognitive Routing in Software-Defined Underwater Acoustic Networks


Abstract
:1. Introduction
- i
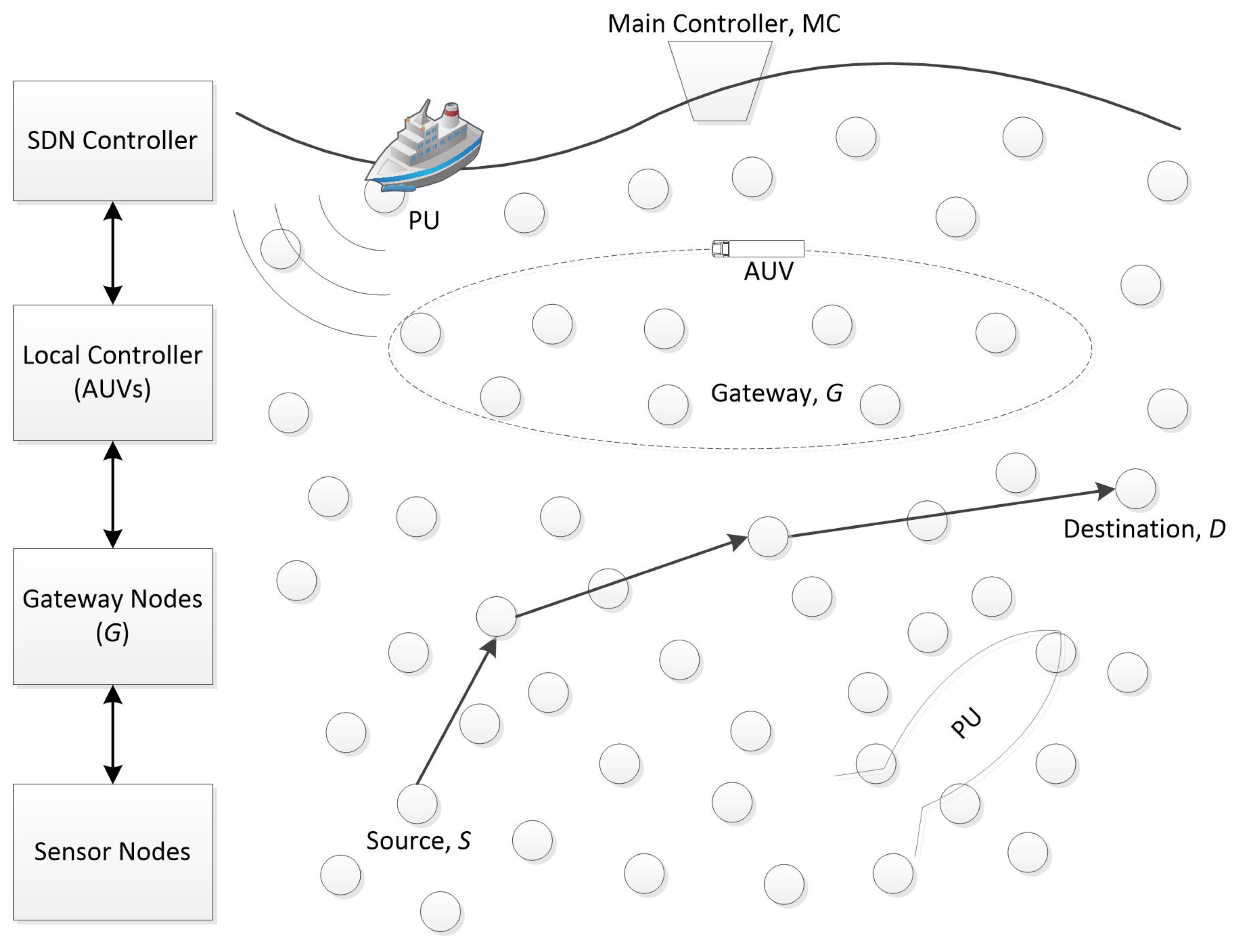
- A novel technique, the cognitive acoustic software-defined underwater network (CA-SDUN), which ensures cognitive routing in underwater sensor networks based on a new concept for SDN, is proposed in order to find a stable route between source and destination. AUVs moving in fixed trajectories serve as local controllers. In this manner, the technique improves the spectrum opportunities and network stability for different users communicating with each other in the ocean.
- ii
- The SDN is applied for the first time using a combination of a cognitive capability and a routing technique in order to overcome the problems of limited services altogether due to application constraints, spectrum scarcity, and high latency.
2. Related Work
3. Proposed Cognitive Acoustic Software-Defined Underwater Network
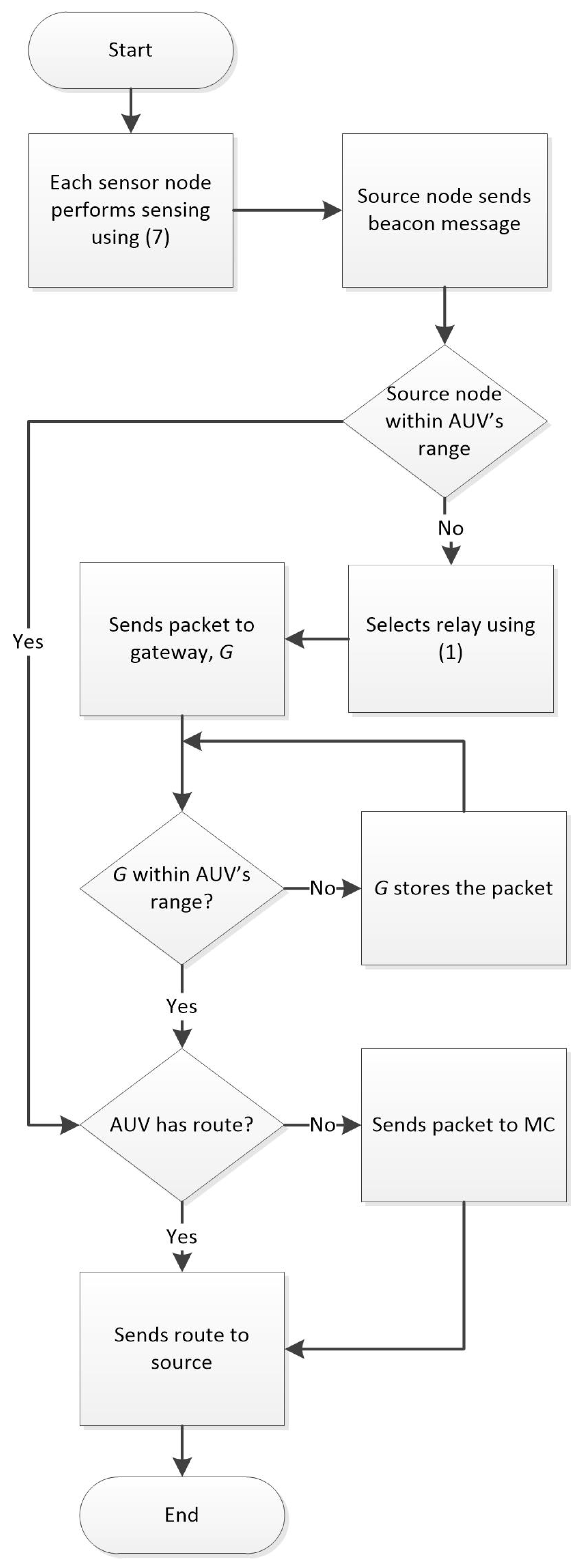
- Beaconing Phase: In the beaconing phase, all sensor nodes (either gateways or conventional nodes) send a beacon message to their neighbors. The beacon message includes node ID, depth, channel state, and speed. Channel state is the presence or absence of the primary user (PU), which will be explained in the next subsection. The MC sends a request message to the LCs in order to maintain the global network state. Each LC forwards this message to all the nodes within transmission range. By doing so, gateway nodes exchange the gathered data with the LCs, which forward it to the MC. The gateway nodes identify themselves as a gateway (an extra entity) in the beacon message. At the conclusion of this phase, all the communicating nodes in the network are aware of the updated network state. In this way, any querying node, whenever it comes across link fragility, can ask the controller for an updated stable route to a destination without sending the packet back to the source node.
- Route Estimation Phase: When a source node wants to communicate with the destination node, it sends a request message to the controller. The foremost part of this cognitive routing scheme that makes it efficient is the estimation of path duration between source and destination. This is a challenging task for any source node in an underwater environment when one kind of PU includes marine mammals. To make it possible, we apply the SDN technique so that the controllers are responsible for providing the best stable route between source and destination by jointly selecting both channel and relay. We all know that the unpredicted movement of marine mammals makes the underwater environment more challenging, which results in several fragile links. For that reason, the two layers of controllers help the sensor nodes with the provision of stable links by keeping an updated network state. There are two possibilities for the source node: either it is outside the transmission range of an LC, or it is within transmission range of an LC.Case 1: Source outside transmission rangeThe source node needs to find the best relay node to reach any gateway when it is outside the transmission range of any LC. The source sends a beacon message to all neighboring nodes and calculates the transmission delay for each node within transmission range. The source then selects the relay node that has the minimum transmission delay from among all the neighboring nodes. As in our previous work [22], the transmission delay (s) is calculated as follows:where i is the source node, j is any node among the N sensor nodes within transmission range of i, and shows a common idle channel from among M channels; is the packet size (bits) ; is the data rate (bits/s) of link , defined as , where is the capacity of the common idle channel between the two communicating nodes as assumed elsewhere [26], and are upper and lower frequencies of each channel, respectively, and in dB re Pa is the power spectral density of the transmitted signal. If there is more than one common channel between two communicating nodes, then the querying node selects the one with highest data rate. is the propagation delay (s), defined as ; (m) where represents a 2D network; , in which is the projection of distance on the line connecting the source to the MC. One might think the MC is not the target of the source if an LC finds a route to the destination in its flow table. The reason for calculating this projection with respect to the MC is to minimize the transmission delay in reaching a controller in order to improve overall network performance. This will also reduce the number of hops by selecting the nodes farthest from the source/querying node. Another reason is the calculation of depth; it is more reasonable to identify surface depth than to estimate the depth of a moving AUV.Among all the neighboring sensor nodes within transmission range of the source node, the source selects the one that has the minimum to reach any gateway. Therefore, the best relay node is calculated as:where N is the total number of neighboring nodes within transmission range of the source node. In so doing, the source node selects the relay node hop-by-hop, and finally reaches the gateway. As this is a cognitive routing scheme, several gateways help the network to make stable links, thereby reducing the delay. Two nodes can only communicate if they have consensus about a common idle channel. Therefore, the gateway set increases the chances that there is a single gateway available to make a stable link. The gateway stores the information until it establishes a link with the AUV. If a relay node finds itself within transmission range of the AUV, it will send the packet directly to the AUV. Once a link is established with an LC, the LC checks its flow table for a route to the destination. If the LC does not find a route to the destination, it sends the request packet to the MC to find the best stable route to the destination.Case 2: Source within transmission rangeWhen a source is within transmission range of an LC, it directly sends a request packet to the LC; otherwise, it finds a gateway from set G. The LC checks in its flow table for a route to the destination, and sends a reply message if it has the best route to the destination. If it does not find a match, it forwards the request packet to the MC. Once the message reaches the controller, the LC/MC estimates the best stable route to the destination in the following manner. Any controller first calculates the path duration (s) of all paths P between source and destination as follows:where , is the total number of hops making up each path between source and destination, and (link duration prediction) (s) is calculated as:where is the expected node connectivity, which can be measured from all the beacon messages a node receives from its neighboring nodes within transmission range in time t, i.e., . This connectivity parameter helps the network to avoid sparse conditions for both channel and relay selection. Finally, the controller finds the best route, R, to the destination:The source node, after receiving the best route, starts transmitting data. As this is a cognitive routing scheme, minimizing the path duration enhances the stability of the network that has a high data rate with low delay. This is because the unique challenges of underwater environment along with mobile PUs increase the chances of link fragility. Therefore, selecting the route with high data rate and low delay sustains stability in underwater networks. If any intermediate node fails to sustain stability, it repeats the above procedure to reach a nearby LC without sending the request packet back to the source node. Consequently, the SDN approach reduces delay by reducing the number of control messages.
Spectrum Sensing and the Channel Model
4. Performance Evaluation
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lal, C.; Petroccia, R.; Pelekanakis, K.; Conti, M.; Alves, J. Toward the Development of Secure Underwater Acoustic Networks. IEEE J. Ocean. Eng. 2017, 42, 1075–1087. [Google Scholar] [CrossRef]
- Luo, Y.; Pu, L.; Zuba, M.; Peng, Z.; Cui, J.-H. Cognitive Acoustics: Making Underwater Communications Environment-friendly. In Proceedings of the International Conference on Underwater Networks and Systems, Rome, Italy, 12–14 November 2014. [Google Scholar]
- Luo, Y.; Pu, L.; Zuba, M.; Peng, Z.; Cui, J.-H. Challenges and Opportunities of Underwater Cognitive Acoustic Networks. IEEE Trans. Emerg. Top. Comput. 2014, 2, 198–211. [Google Scholar] [CrossRef]
- Wang, J.; Ma, L.; Chen, W. Design of underwater acoustic sensor communication systems based on software-defined networks in big data. Int. J. Distrib. Sens. Netw. 2017, 13, 1–14. [Google Scholar] [CrossRef]
- Xu, H.; Li, X.-Y.; Huang, L.; Deng, H.; Huang, H.; Wang, H. Incremental Deployment and Throughput Maximization Routing for a Hybrid SDN. IEEE/ACM Trans. Netw. 2017, 99, 1–15. [Google Scholar] [CrossRef]
- Fan, R.; Goldrick, C.; Gerla, M. An SDN Architecture for Underwater Search and Surveillance. In Proceedings of the 13th Annual Conference on Wireless On-Demand Network Systems and Services, Jackson, WY, USA, 21–24 February 2017; pp. 96–99. [Google Scholar]
- Yan, H.; Shi, Z.; Cui, J.-H. DBR: Depth-Based Routing for Underwater Sensor Networks. In Proceedings of the 7th International IFIP-TC6 Networking Conference on Adhoc and Sensor Networks, Wireless Networks, Next Generation Internet, Singapore, 5–9 May 2008; pp. 72–86. [Google Scholar]
- Lee, U.; Wang, P.; Noh, Y.; Vieira, L.; Gerla, M.; Cui, J.-H. Pressure Routing for Underwater Sensor Networks. In Proceedings of the IEEE INFOCOM, San Diego, CA, USA, 14–19 March 2010. [Google Scholar]
- Noh, Y.; Lee, U.; Wang, P.; Choi, B.S.C.; Gerla, M. VARP: Void Aware Pressure Routing for Underwater Sensor Networks. IEEE Trans. Mob. Comput. 2013, 12, 895–908. [Google Scholar] [CrossRef]
- Pompili, D.; Melodia, T.; Akyildiz, I.F. Distributed Routing Algorithms for Underwater Acoustic Sensor Networks. IEEE Trans. Wirel. Commun. 2010, 9, 2934–2944. [Google Scholar] [CrossRef]
- Basagni, S.; Petrioli, C.; Petroccia, R.; Spaccini, D. Channel-aware Routing for Underwater Wireless Networks. In Proceedings of the IEEE OCEANS, Yeosu, Korea, 21–24 May 2012. [Google Scholar]
- Yoon, S.; Azad, A.K.; Oh, H.; Kim, S. AURP: An AUV-aided underwater routing protocol for underwater acoustic sensor networks. Sensors 2012, 12, 1827–1845. [Google Scholar] [CrossRef] [PubMed]
- Carlson, E.A.; Beaujean, P.-P.J.; An, E. Location-Aware Source Routing Protocol for Underwater Acoustic Networks of AUVs. J. Electr. Comput. Eng. 2012, 2012, 1–18. [Google Scholar] [CrossRef]
- Ali, T.; Jung, L.T.; Faye, I. Diagonal and Vertical Routing Protocol for Underwater Wireless Sensor Network. Procedia Soc. Behav. Sci. 2014, 129, 372–379. [Google Scholar] [CrossRef]
- Coutinho, R.W.L.; Boukerche, A.; Vieira, L.F.M.; Loureiro, A.A. GEDAR: Geographic and opportunistic routing protocol with depth adjustment for mobile underwater sensor networks. In Proceedings of the IEEE International Conference on Communications, Sydney, Australia, 10–14 June 2014. [Google Scholar]
- Ilyas, N.; Alghamdi, T.; Farooq, M.; Mehboob, B.; Sadiq, A.; Qasim, U.; Khan, Z.; Javaid, N. AEDG: AUV-aided Efficient Data Gathering Routing Protocol for Underwater Wireless Sensor Networks. Procedia Comput. Sci. 2015, 52, 568–575. [Google Scholar] [CrossRef]
- Rani, J.M.; Talwar, R. Energy efficient chain based cooperative routing protocol for WSN. Appl. Soft Comput. 2015, 35, 386–397. [Google Scholar] [CrossRef]
- Zhuo, W.; Hongmei, G.; Longjie, J.; Xiaoning, F. AUV-aided communication method for underwater mobile sensor network. In Proceedings of the IEEE OCEANS, Shanghai, China, 10–13 April 2016; pp. 1–7. [Google Scholar]
- Luo, Y.; Pu, L.; Mo, H.; Zhu, Y.; Peng, Z.; Cui, J.-H. Dynamic Control Channel MAC for Underwater Cognitive Acoustic Networks. In Proceedings of the IEEE INFOCOM, San Francisco, CA, USA, 10–14 April 2016. [Google Scholar]
- Luo, Y.; Pu, L.; Mo, H.; Zhu, Y.; Peng, Z.; Cui, J.-H. Receiver-Initiated Spectrum Management for Underwater Cognitive Acoustic Network. IEEE Trans. Mob. Comput. 2017, 16, 198–212. [Google Scholar] [CrossRef]
- Li, X.; Sun, Y.; Guo, Y.; Fu, X.; Pan, M. Dolphins First: Dolphin-Aware Communications in Multi-hop Underwater Cognitive Acoustic Networks. IEEE Trans. Wirel. Commun. 2017, 16, 2043–2056. [Google Scholar] [CrossRef]
- Ghafoor, H.; Noh, Y.; Koo, I. OFDM-based Spectrum-Aware Routing in Underwater Cognitive Acoustic Networks. IET Commun. 2017. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Wang, P.; Lin, S.-C. Softwater: Software-defined networking for next-generation underwater communication systems. Ad Hoc Netw. 2016, 46, 1–11. [Google Scholar] [CrossRef]
- Demirors, E.; Shi, J.; Guida, R.; Melodia, T. SEANet G2: Toward a High-Data-Rate Software-Defined Underwater Acoustic Networking Platform. In Proceedings of the ACM WUWNET’16, Shanghai, China, 24–26 October 2016. [Google Scholar]
- Lal, C.; Petroccia, R.; Conti, M.; Alves, J. Secure Underwater Acoustic Networks: Current and Future Research Directions. In Proceedings of the IEEE UComms, Lerici, Italy, 30 August–1 September 2016. [Google Scholar]
- Ding, L.; Melodia, T.; Batalama, S.N.; Matyjas, J.D.; Medley, M.J. Cross-Layer Routing and Dynamic Spectrum Allocation in Cognitive Radio Ad Hoc Networks. IEEE Trans. Veh. Technol. 2010, 59, 1969–1979. [Google Scholar] [CrossRef]
- Erbe, C.; Reichmuth, C.; Cunningham, K.; Lucke, K.; Dooling, R. Communication masking in marine mammals: A review and research strategy. Mar. Pollut. Bull. 2016, 103, 15–38. [Google Scholar] [CrossRef] [PubMed]
- Mellinger, D.K.; Clark, C.W. MobySound: A reference archive for studying automatic recognition of marine mammal sounds. Appl. Acoust. 2006, 67, 1226–1242. [Google Scholar] [CrossRef]
- Axell, E.; Larsson, E.G. Optimal and Sub-Optimal Spectrum Sensing of OFDM Signals in Known and Unknown Noise Variance. IEEE J. Sel. Areas Commun. 2011, 29, 290–304. [Google Scholar] [CrossRef]
- Stojanovic, M.; Preisig, J. Underwater Acoustic Communication Channels: Propagation Models and Statistical Characterization. IEEE Commun. Mag. 2009, 47, 84–89. [Google Scholar] [CrossRef]
- Stojanovic, M. On the relationship between capacity and distance in an underwater acoustic communication channel. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2007, 11, 34–43. [Google Scholar] [CrossRef]
- Berkhovskikh, L.; Lysanov, Y. Fundamentals of Ocean Acoustics; Springer: Berlin/Heidelberg, Germany, 1982. [Google Scholar]
- Casari, P.; Tapparello, C.; Guerra, F.; Favaro, F.; Calabrese, I.; Toso, G.; Azad, S.; Masiero, R.; Zorzi, M. Open-source Suites for Underwater Networking: WOSS and DESERT Underwater. IEEE Netw. 2014, 28, 38–46. [Google Scholar] [CrossRef]
- Guerra, F.; Casari, P.; Zorzi, M. World Ocean Simulation System (WOSS): A Simulation Tool for Underwater Networks with Realistic Propagation Modeling. In Proceedings of the 4th ACM International Workshop on Underwater Networks (WuWNeT), Berkeley, CA, USA, 3 November 2009. [Google Scholar]
- Qarabaqi, P.; Stojanovic, M. Statistical Characterization and Computationally Efficient Modeling of a Class of Underwater Acoustic Communication Channels. IEEE J. Ocean. Eng. 2013, 38, 701–717. [Google Scholar] [CrossRef]
- Toso, G.; Casari, P.; Zorzi, M. The Effect of Different Attenuation Models on the Performance of Routing in Shallow-Water Networks. In Proceedings of the Underwater Communications and Networking (UComms), Sestri Levante, Italy, 3–5 September 2014; pp. 1–5. [Google Scholar]
- Bahrami, N.; Khamis, N.H.H.; Baharom, A.B. Study of Underwater Channel Estimation Based on Different Node Placement in Shallow Water. IEEE Sens. J. 2016, 16, 1095–1102. [Google Scholar] [CrossRef]
- Porter, M.B. Bellhop Code. Available online: http://oalib.hlsresearch.com/Rays/index.html (accessed on May 2016).
- Baldo, N.; Miozzo, M.; Guerra, F.; Rossi, M.; Zorzi, M. MIRACLE: The Multi-Interface Cross-Layer Extension of ns2. EURASIP J. Wirel. Commun. Netw. 2010, 2010. [Google Scholar] [CrossRef]
- Wang, N.; Gao, Y.; Cuthbert, L. Spectrum Sensing Using Adaptive Threshold based Energy Detection for OFDM Signals. In Proceedings of the IEEE International Conference on Communication Systems (ICCS), Macau, China, 19–21 November 2014; pp. 359–363. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Protocols | Proposed for UANs? | Proposed for UCANs? | Proposed for SDUN? | Routing in UANs? | Cognitive Routing in UANs? | Cognitive Routing in SDUN? |
|---|---|---|---|---|---|---|
| DBR [7] | ✓ | ✗ | ✗ | ✓ | ✗ | ✗ |
| [8] | ✓ | ✗ | ✗ | ✓ | ✗ | ✗ |
| VAPR [9] | ✓ | ✗ | ✗ | ✓ | ✗ | ✗ |
| [10] | ✓ | ✗ | ✗ | ✓ | ✗ | ✗ |
| CARP [11] | ✓ | ✗ | ✗ | ✓ | ✗ | ✗ |
| AURP [12] | ✓ | ✗ | ✗ | ✓ | ✗ | ✗ |
| LASR [13] | ✓ | ✗ | ✗ | ✓ | ✗ | ✗ |
| DVRP [14] | ✓ | ✗ | ✗ | ✓ | ✗ | ✗ |
| GEDAR [15] | ✓ | ✗ | ✗ | ✓ | ✗ | ✗ |
| AEDG [16] | ✓ | ✗ | ✗ | ✓ | ✗ | ✗ |
| [17] | ✓ | ✗ | ✗ | ✓ | ✗ | ✗ |
| AA-RP [18] | ✓ | ✗ | ✗ | ✓ | ✗ | ✗ |
| DCC-MAC [19] | ✗ | ✓ | ✗ | ✗ | ✗ | ✗ |
| RISM [20] | ✗ | ✓ | ✗ | ✗ | ✗ | ✗ |
| [21] | ✗ | ✓ | ✗ | ✗ | ✗ | ✗ |
| OSAR [22] | ✗ | ✓ | ✗ | ✗ | ✓ | ✗ |
| SoftWater [23] | ✓ | ✗ | ✓ | ✗ | ✗ | ✗ |
| [4] | ✓ | ✗ | ✓ | ✗ | ✗ | ✗ |
| SEANet G2 [24] | ✓ | ✗ | ✓ | ✗ | ✗ | ✗ |
| [25] | ✓ | ✓ | ✓ | ✗ | ✗ | ✗ |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghafoor, H.; Koo, I. Cognitive Routing in Software-Defined Underwater Acoustic Networks. Appl. Sci. 2017, 7, 1312. https://doi.org/10.3390/app7121312
Ghafoor H, Koo I. Cognitive Routing in Software-Defined Underwater Acoustic Networks. Applied Sciences. 2017; 7(12):1312. https://doi.org/10.3390/app7121312
Chicago/Turabian StyleGhafoor, Huma, and Insoo Koo. 2017. "Cognitive Routing in Software-Defined Underwater Acoustic Networks" Applied Sciences 7, no. 12: 1312. https://doi.org/10.3390/app7121312
APA StyleGhafoor, H., & Koo, I. (2017). Cognitive Routing in Software-Defined Underwater Acoustic Networks. Applied Sciences, 7(12), 1312. https://doi.org/10.3390/app7121312