
Wind Turbine Gearbox Fault Diagnosis Based on Improved EEMD and Hilbert Square Demodulation

Abstract
:1. Introduction
2. Review of Ensemble Empirical Mode Decomposition and Hilbert Square Demodulation
2.1. Ensemble Empirical Mode Decomposition
- Given that is an original signal, add random white noise signal to :where is the noise-added signal and M is the number of trials.
- Decompose into a series of IMFs utilizing EMD as follows:where stands for the IMF obtained each trial, denotes the residue of the j-th trial and Nj is the IMFs number of the j-th trial.
- If j < M, repeat Steps 1 and 2, and add different random white noise signals each time.
- Since the noise series in each decomposition step is statistically different and low correlation exists among the various series, the noise will be canceled out in the ensemble means, provided that the sufficient number of steps has been taken. The ensemble means of the corresponding IMFs can be obtained as the final IMFs:where i = 1, 2, 3, ..., I and .
- is the ensemble mean of corresponding IMF of the decomposition.
2.2. Hilbert Square Demodulation
3. The Proposed Method
3.1. Criterion of Resampling Frequency Selection
3.2. Improved EEMD
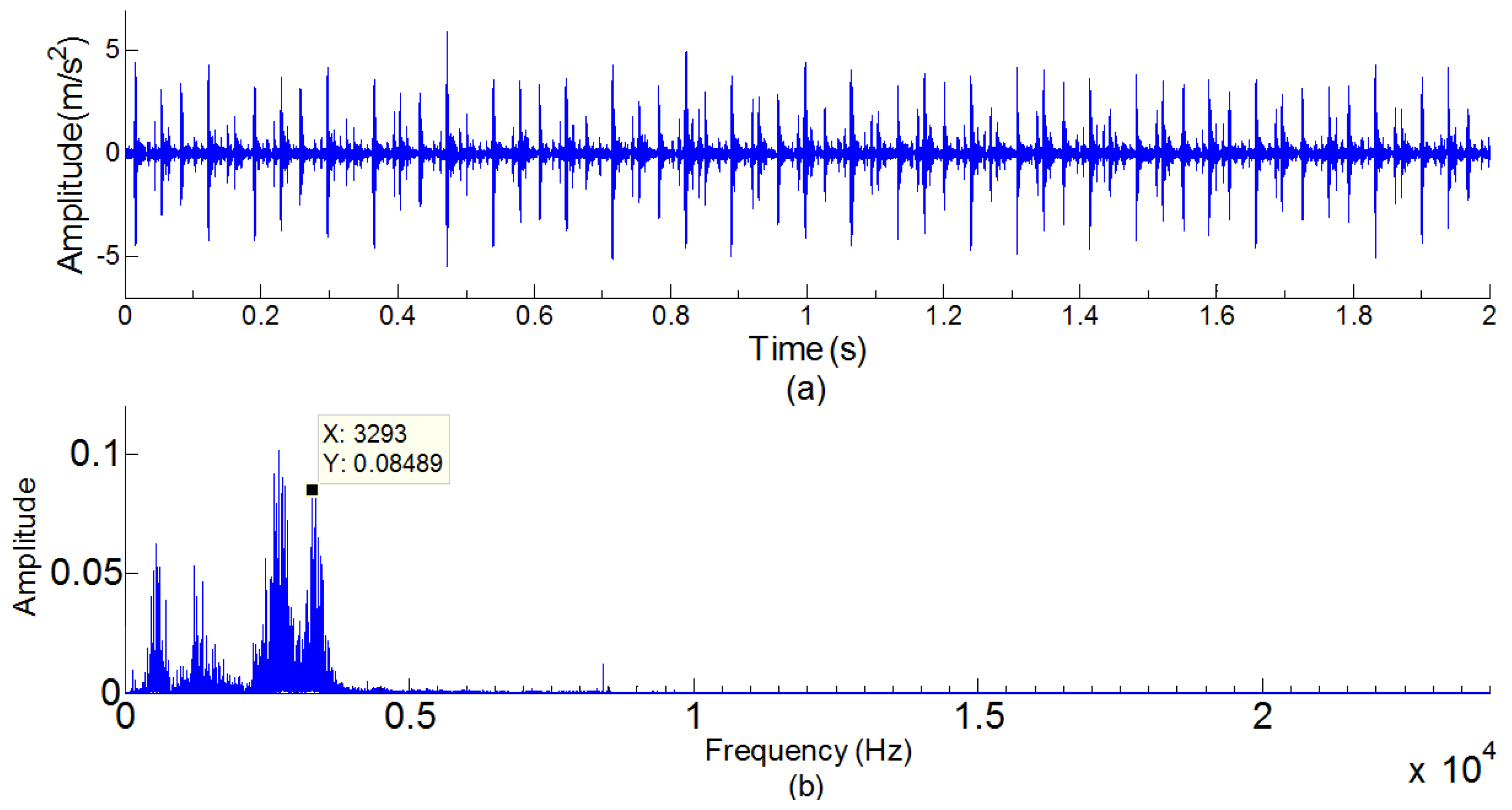
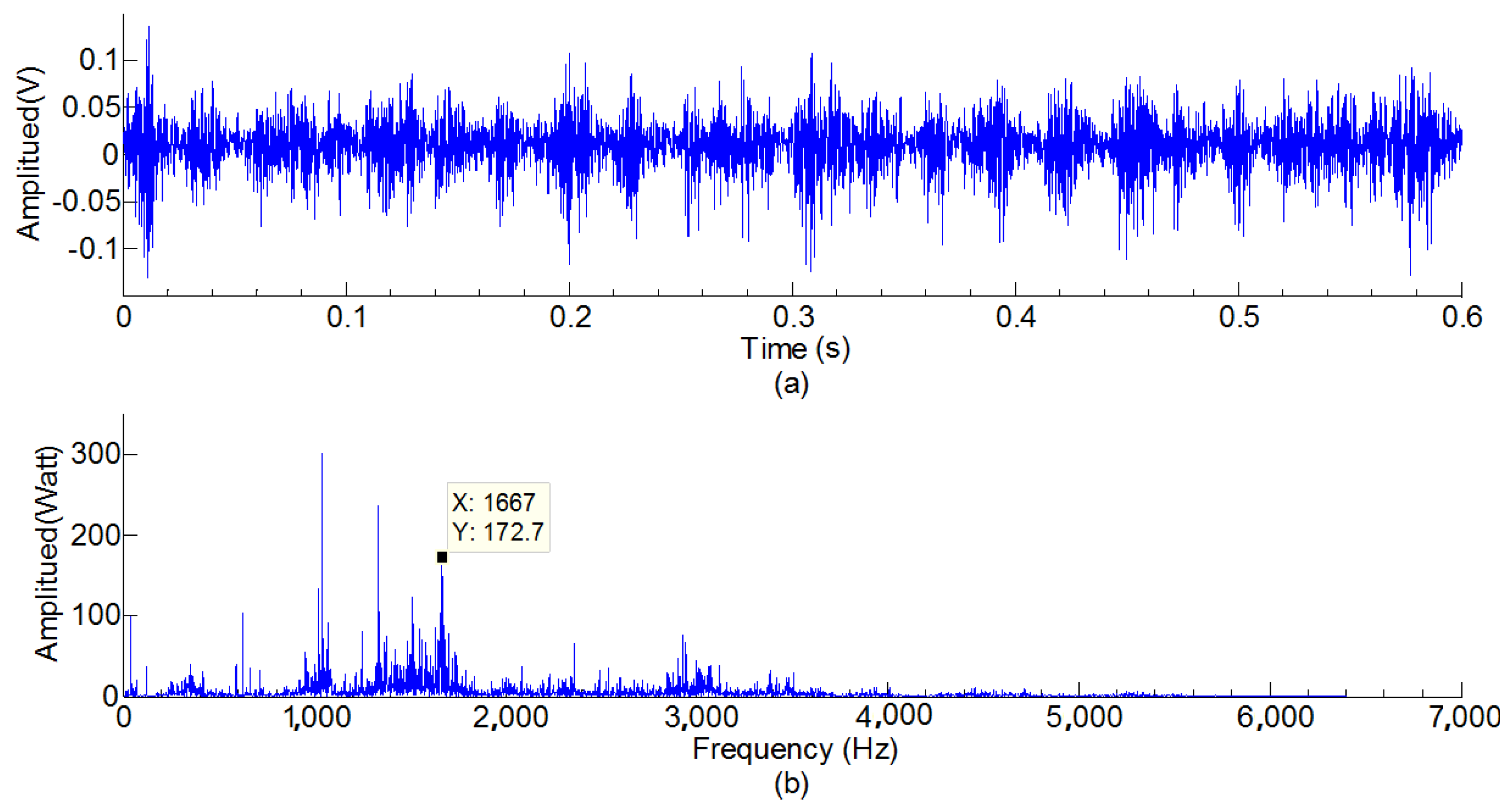
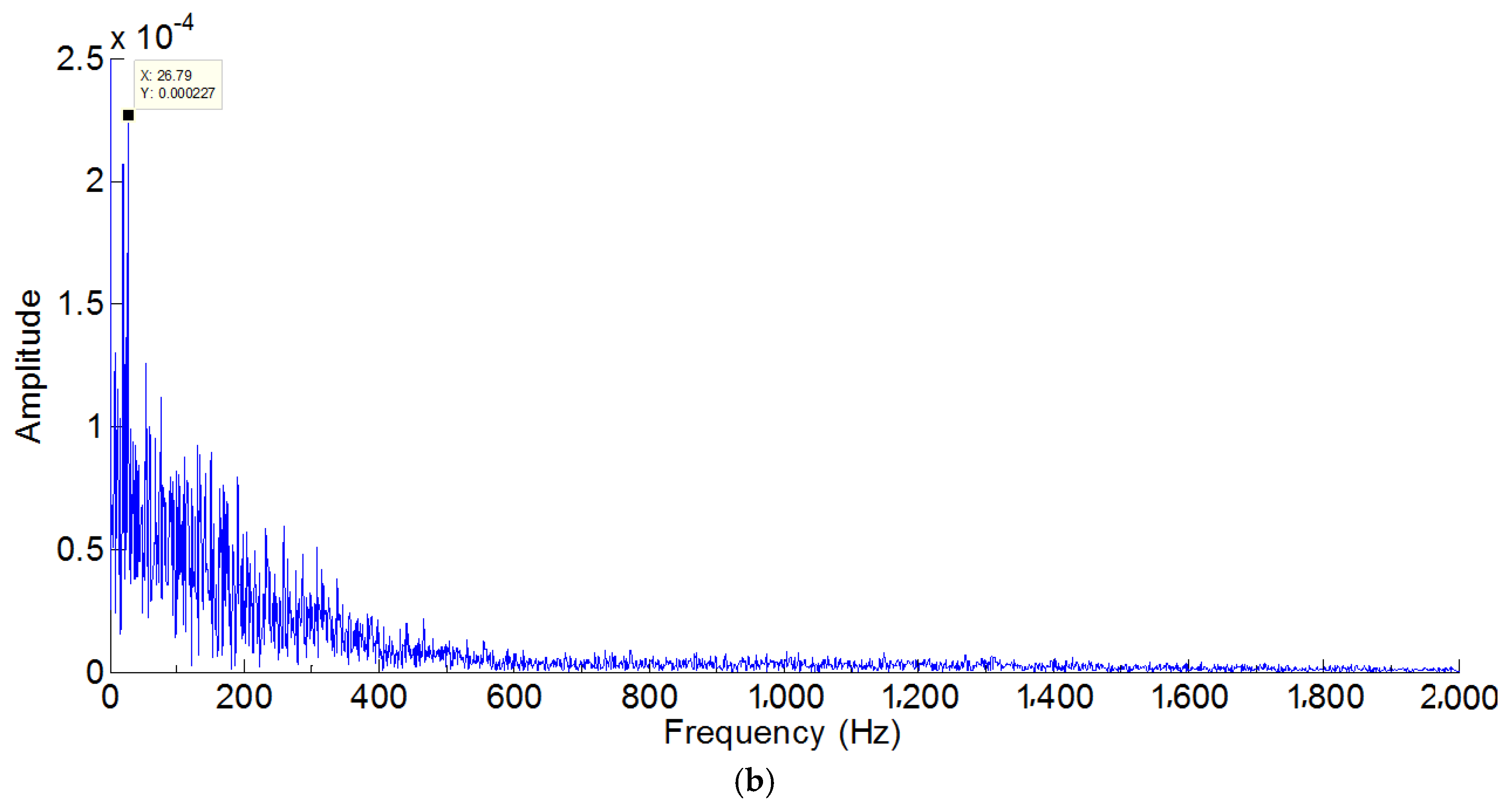
- In order to ascertain the frequency components of the vibration signal, Fourier transform was first performed to obtain its frequency spectrum.
- Twelve-times the maximum frequency was subtracted from the sampling frequency:where was the sampling frequency of vibration, was the resampling frequency calculated by the resampling frequency criterion, was the maximum frequency of the vibration signal and was the frequency to determine whether or not to execute the resample algorithm.If , we resampled the raw signal with the resampling frequency and output the resample signal; otherwise, we output the raw signal directly.
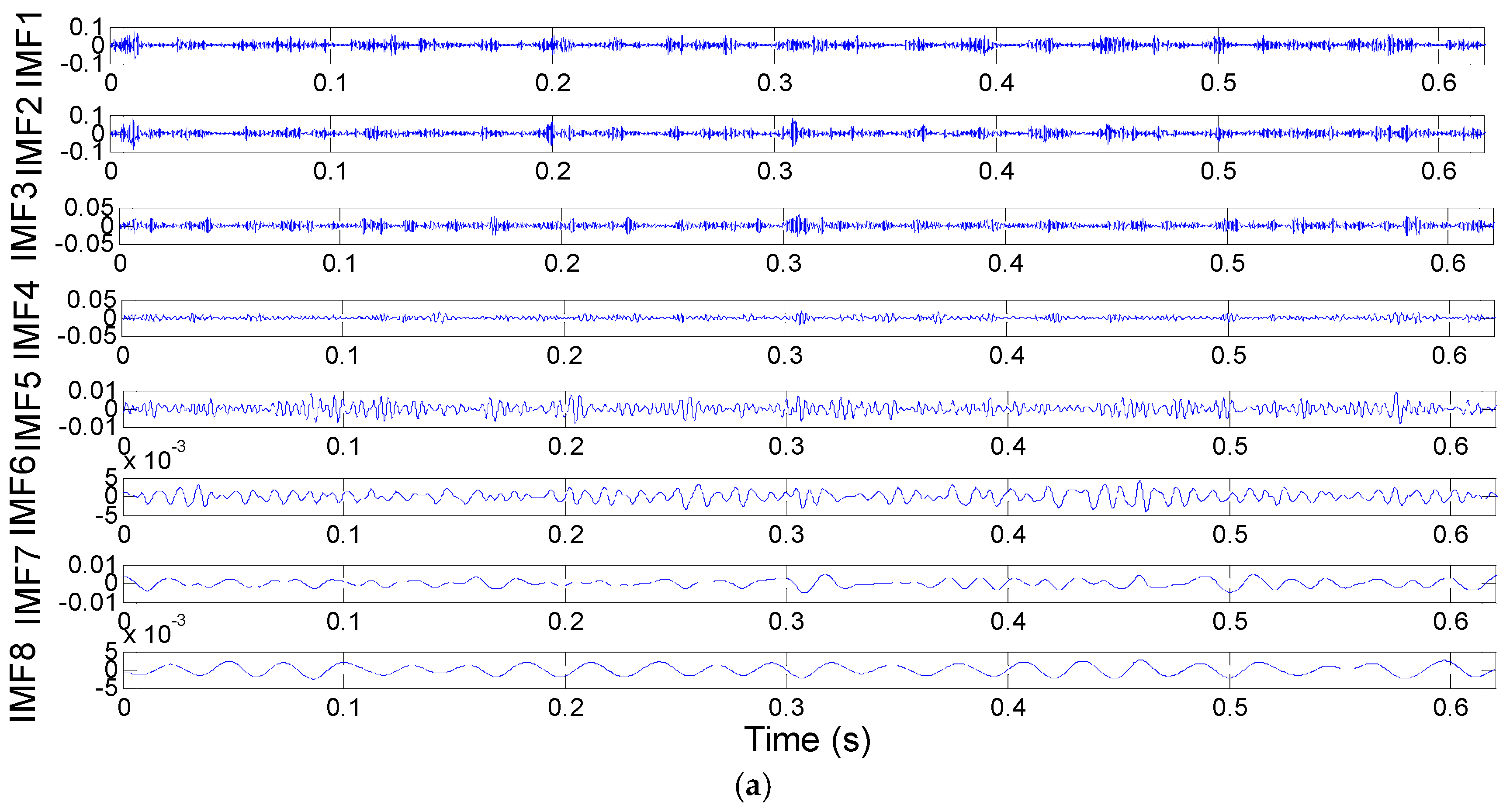
- Perform EEMD on the signal obtained in Step 2.
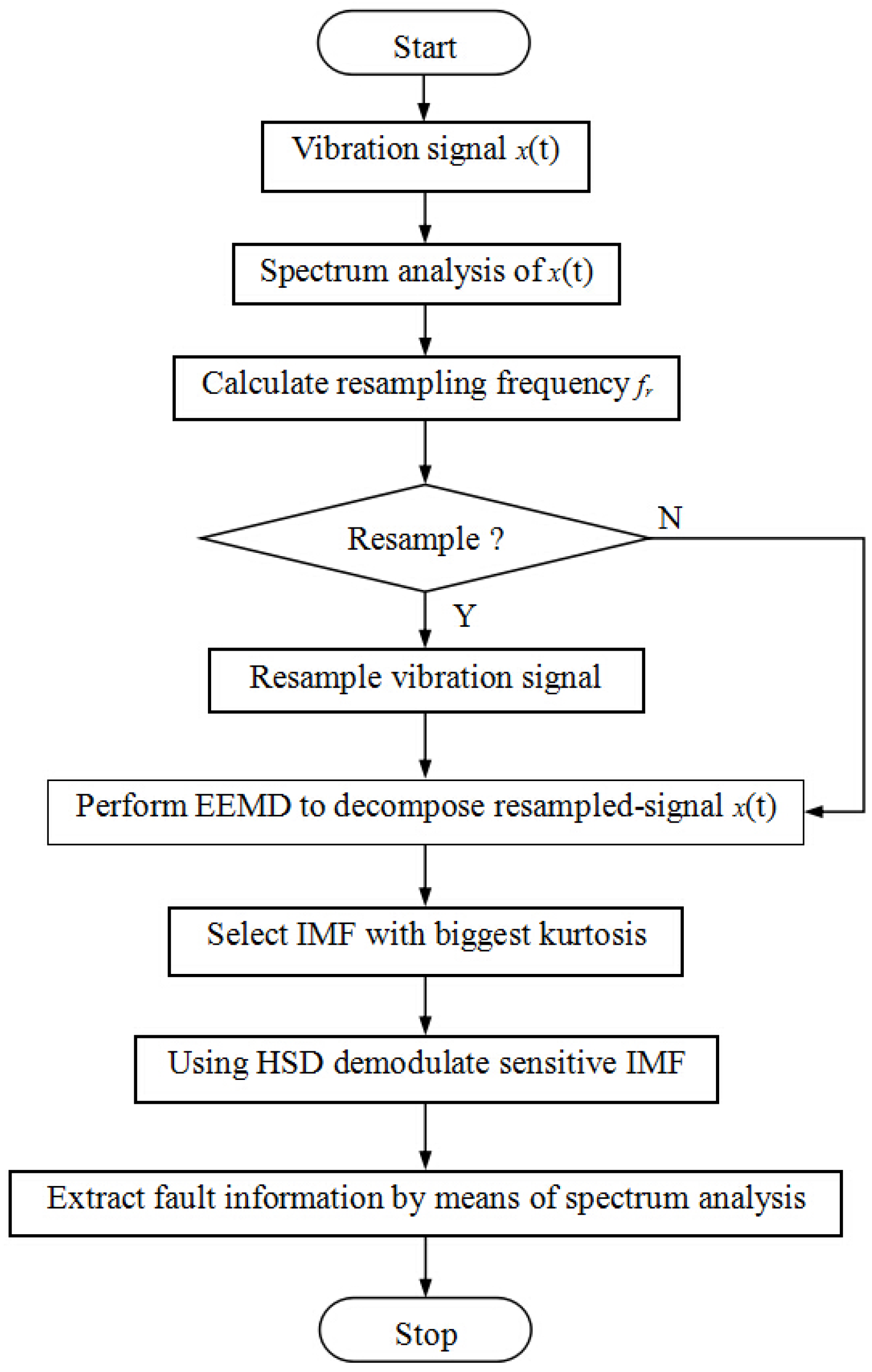
3.3. The Proposed Method
- 1
- Spectrum analysis to extract the distributions of the frequencies of the vibration signal, using the resampling frequency criterion to calculate the resampling frequency value .
- 2
- Raw vibration signal resample. Subtract the resampling frequency from the sampling frequency:If , resample the raw vibration signal with resampling frequency , and output the resampled signal; otherwise, output the raw vibration signal directly.
- 3
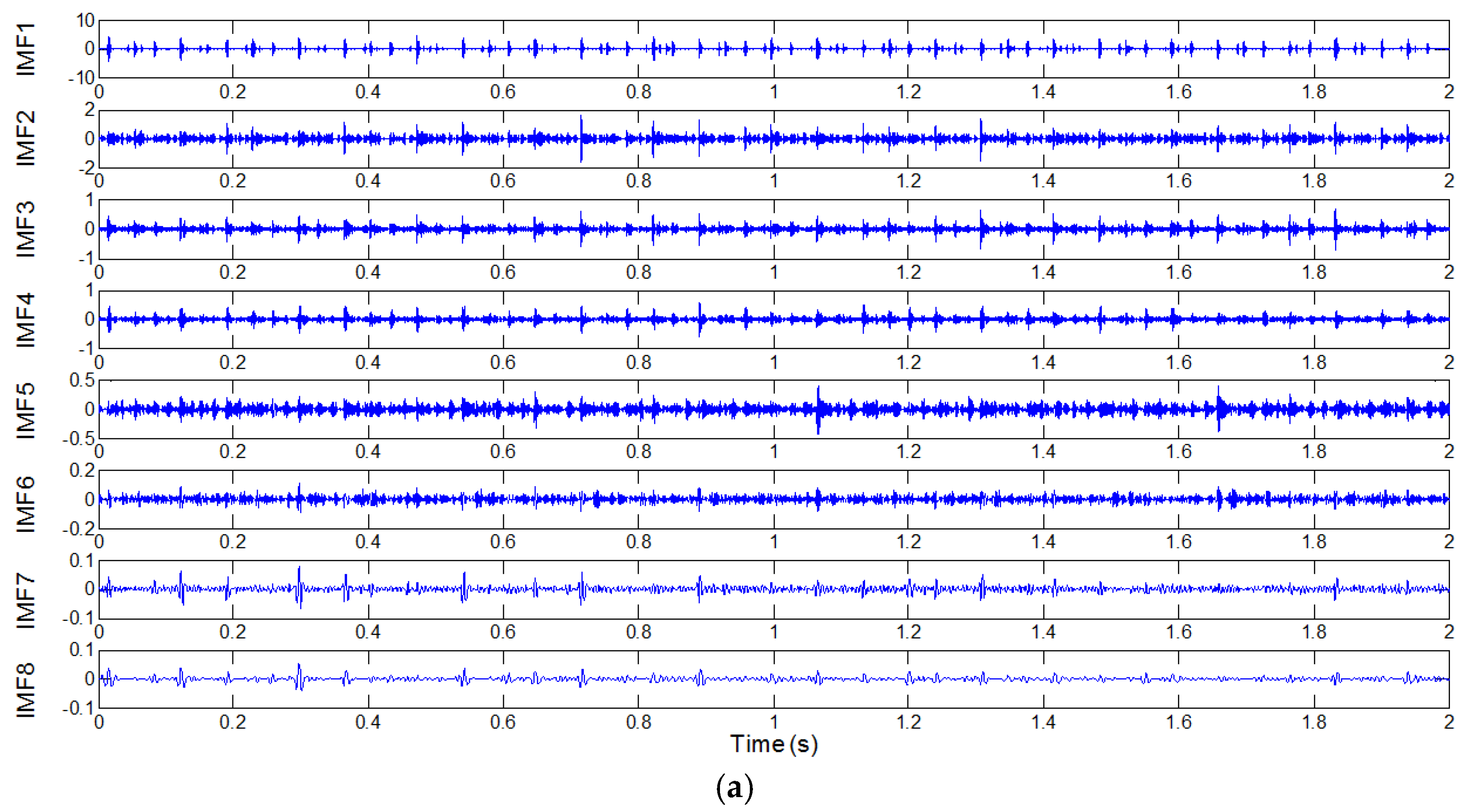
- The resampled signal decomposes by means of EEMD. Use EEMD to decompose the vibration signal obtained in Step 2 into a set of IMFs.
- 4
- Sensitive IMF selection with the biggest kurtosis index value.
- 5
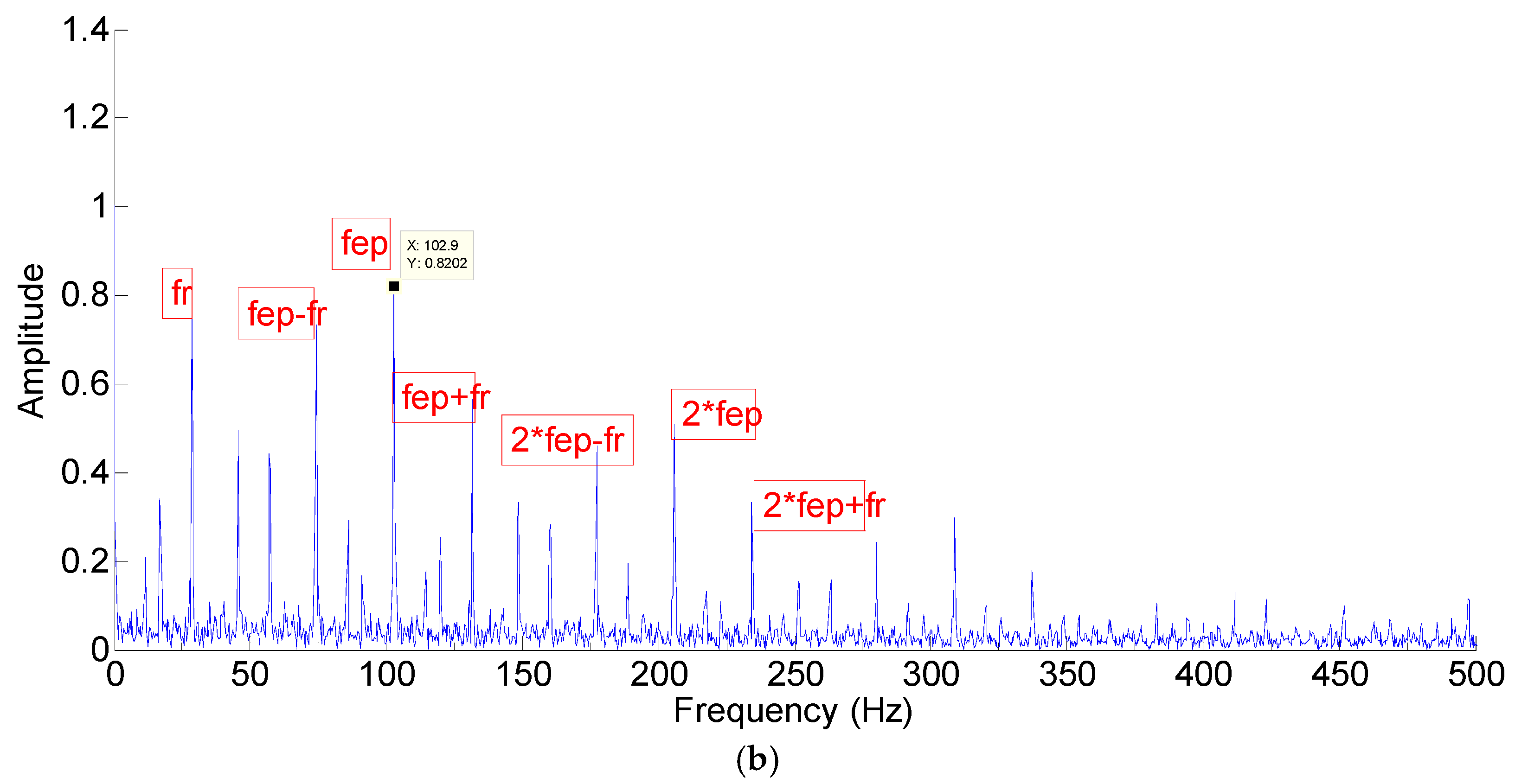
- Feature information extraction from sensitive IMF by HSD. Use HSD to demodulate sensitive IMF to extract feature information from the demodulated signal.
- 6
- Fault type identified by means of spectrum analysis.
4. The Proposed Method for Gearbox Fault Diagnosis of a Wind Turbine
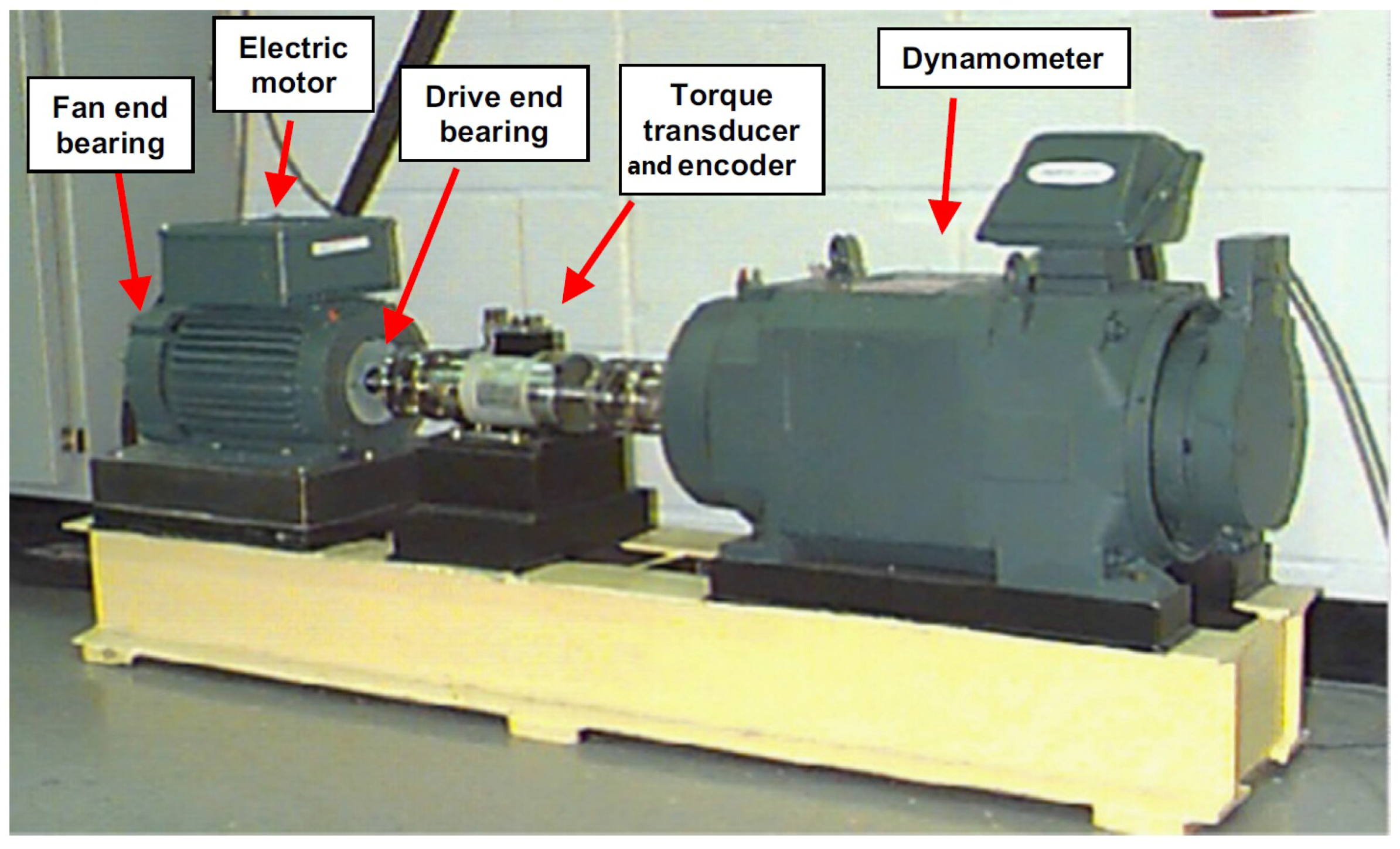
4.1. Bearing Experimental Evaluation
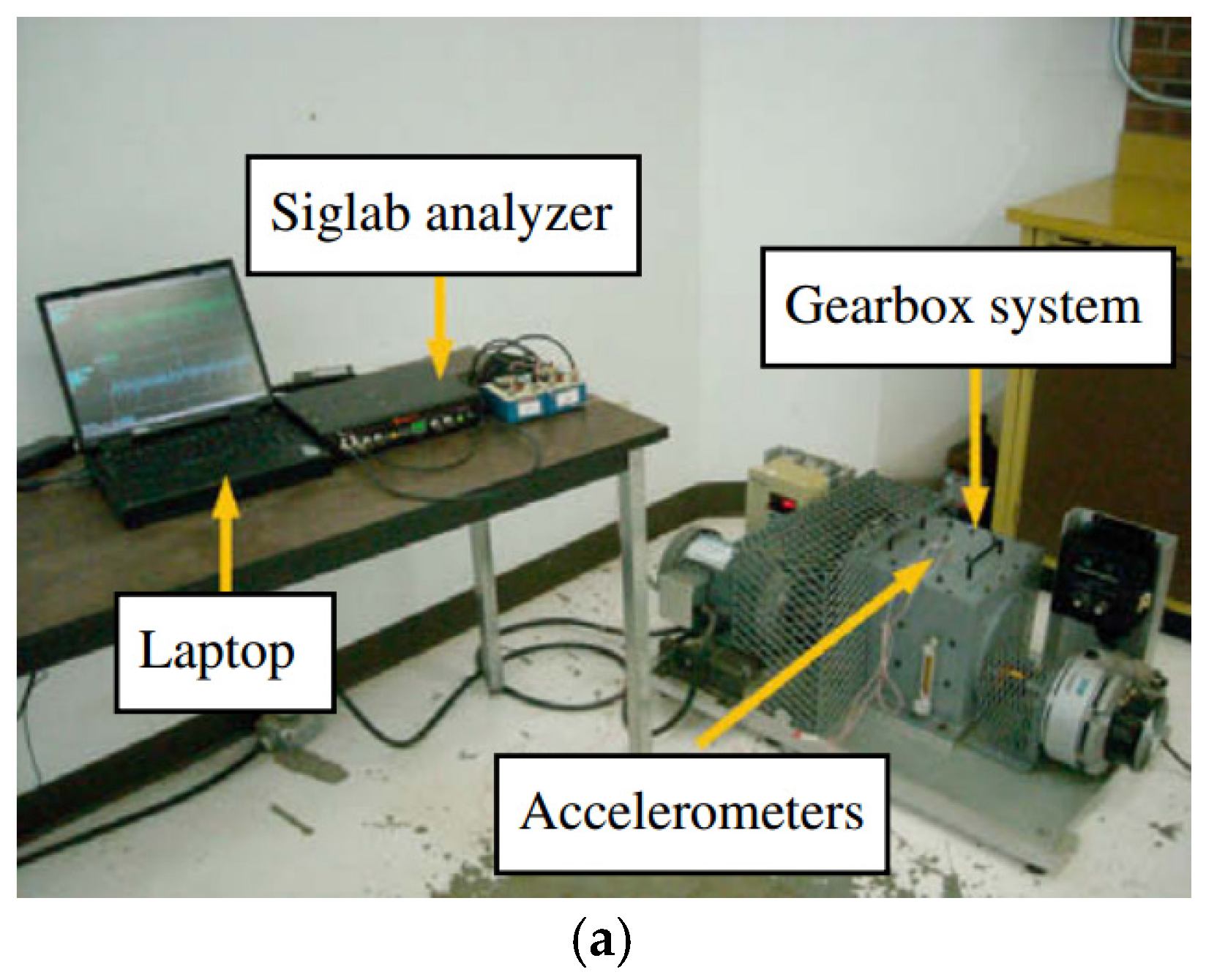
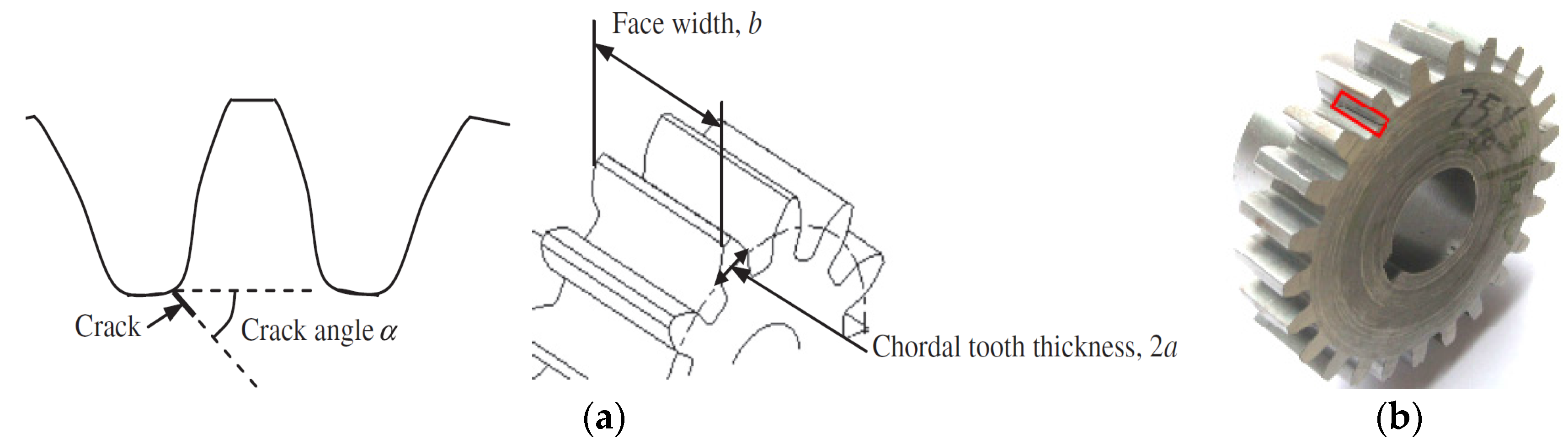
4.2. Gear Experimental Evaluation
5. Discussion and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Song, G.; Li, H.; Gajic, B.; Zhou, W.; Chen, P.; Gu, H. Wind turbine blade health monitoring with piezoceramic-based wireless sensor network. Int. J. Smart Nano Mater. 2013, 4, 150–166. [Google Scholar] [CrossRef]
- Antoniadou, I.; Manson, G.; Staszewski, W.J.; Barszcz, T.; Worden, K. A time-frequency analysis approach for condition monitoring of a wind turbine gearbox under varying load conditions. Mech. Syst. Signal Process. 2015, 64, 188–216. [Google Scholar] [CrossRef]
- Zheng, J.; Cheng, J.; Yang, Y. Generalized empirical mode decomposition and its applications to rolling element bearing fault diagnosis. Mech. Syst. Signal Process. 2013, 40, 136–153. [Google Scholar] [CrossRef]
- Lei, Y.G.; He, Z.J.; Yanyang, Z.; Chen, X. New clustering algorithm-based fault diagnosis using compensation distance evaluation technique. Mech. Syst. Signal Process. 2008, 22, 419–435. [Google Scholar] [CrossRef]
- Nikolaou, N.; Antoniadis, I. Rolling element bearing fault diagnosis using wavelet packets. NDT & E Int. 2002, 35, 197–205. [Google Scholar]
- Zhang, L.; Wang, C.; Song, G. Health Status Monitoring of Cuplock Scaffold Joint Connection Based on Wavelet Packet Analysis. Shock Vib. 2015, 2015, 1–7. [Google Scholar] [CrossRef]
- Wang, Z.; Lu, C.; Wang, Z.; Ma, J. Health assessment of rotary machinery based on integrated feature selection and Gaussian mixed model. J. Vibroeng. 2014, 16, 1753–1762. [Google Scholar]
- Lu, C.; Hu, J.; Liu, H. Application of EMD-AR and MTS for hydraulic pump fault diagnosis. J. Vibroeng. 2013, 15, 761–772. [Google Scholar]
- Lu, C.; Yuan, H.; Tang, Y. Bearing performance degradation assessment and prediction based on EMD and PCA-SOM. J. Vibroeng. 2014, 16, 1387–1396. [Google Scholar]
- He, Q.; Feng, Z.; Kong, F. Detection of signal transients using independent component analysis and its application in gearbox condition monitoring. Mech. Syst. Signal Process. 2007, 21, 2056–2071. [Google Scholar] [CrossRef]
- Wang, J.; Gao, R.X.; Yan, R.Q.; Wang, L. An integrative computational method for gearbox diagnosis. Procedia CIRP 2013, 12, 133–138. [Google Scholar] [CrossRef]
- Koizumi, T.; Tsujiuchi, N.; Matsumura, Y. Diagnosis with the correlation integral in time domain. Mech. Syst. Signal Process. 2000, 14, 1003–1010. [Google Scholar] [CrossRef]
- Liang, X.H.; Zuo, M.J.; Hoseini, M.R. Vibration signal modeling of a planetary gear set for tooth crack detection. Eng. Fail. Anal. 2015, 48, 185–200. [Google Scholar] [CrossRef]
- Amirat, Y.; Choqueuse, V.; Benbouzid, M. EEMD-based wind turbine bearing failure detection using the generator stator current homopolar component. Mech. Syst. Signal Process. 2013, 41, 667–678. [Google Scholar] [CrossRef] [Green Version]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–14. [Google Scholar] [CrossRef]
- Zhang, J.; Yan, R.; Gao, R.; Feng, Z. Performance enhancement of Ensemble Empirical Mode Decomposition. Mech. Syst. Signal Process. 2010, 24, 2104–2123. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The Empirical Mode Decomposition and the Hilbert Spectrum for Nonlinear and Non-stationary Time Series Analysis. R. Soc. Lond. Proc. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Stevenson, N.; Mesbah, M.; Boashash, B. A sampling limit for the empirical mode decomposition. In Proceedings of the 8th International Symposium on Signal Processing and its Applications, Sydney, Australia, 28–31 August 2005; pp. 647–650.
- Wang, H.; Chen, J.; Dong, G. Feature extraction of rolling bearing’s early weak fault based on EEMD and tunable Q-factor wavelet transform. Mech. Syst. Signal Process. 2014, 48, 103–119. [Google Scholar] [CrossRef]
- Stack, J.R.; Harley, R.G.; Habetler, T.G. An amplitude modulation detector for fault diagnosis in rolling element bearings. IEEE Trans. Ind. Electron. 2004, 51, 1097–1102. [Google Scholar] [CrossRef]
- Zhang, X.; Liang, Y.; Zhou, J. A novel bearing fault diagnosis model integrated permutation entropy, ensemble empirical mode decomposition and optimized SVM. Measurement 2015, 69, 164–179. [Google Scholar] [CrossRef]
- Yu, X.; Ding, E.; Chen, C.; Liu, X.; Li, L. A Novel Characteristic Frequency Bands Extraction Method for Automatic Bearing Fault Diagnosis Based on Hilbert Huang Transform. Sensors 2015, 15, 27869–27893. [Google Scholar] [CrossRef] [PubMed]
- Bedrosian, E. A product theorem for Hilbert transform. Proc. IEEE 1963, 51, 868–869. [Google Scholar] [CrossRef]
- Case Western Reserve University Bearing Data Center Website. Available online: http://csegroups.case.edu/bearingdatacenter/home (accessed on 25 December 2015).
- Reliability Research Lab. Available online: http://www.mece.ualberta.ca/groups/reliability/index.html (accessed on 28 December 2015).
- Lei, Y.; Zuo, M.J. Gear crack level identification based on weighted K nearest neighbor classification algorithm. Mech. Syst. Signal Process. 2009, 23, 1535–1547. [Google Scholar] [CrossRef]
- Lei, Y.; Zuo, M.J.; He, Z.; Zi, Y. A multidimensional hybrid intelligent method for gear fault diagnosis. Expert Syst. Appl. 2010, 37, 1419–1430. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inner Ring | Outer Ring | Cage Train | Rolling Element |
|---|---|---|---|
| 5.4152 | 3.5848 | 0.39828 | 4.7135 |
| Motor Speed (RPM) | f1 (Hz) | f12 (Hz) | f2 (Hz) | f34 (Hz) | f3 (Hz) |
|---|---|---|---|---|---|
| 2200 | 8.73 | 418.89 | 26.19 | 628.56 | 15.72 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.; Chen, P.; Chen, W.; Wu, C.; Li, J.; Wu, J. Wind Turbine Gearbox Fault Diagnosis Based on Improved EEMD and Hilbert Square Demodulation. Appl. Sci. 2017, 7, 128. https://doi.org/10.3390/app7020128
Chen H, Chen P, Chen W, Wu C, Li J, Wu J. Wind Turbine Gearbox Fault Diagnosis Based on Improved EEMD and Hilbert Square Demodulation. Applied Sciences. 2017; 7(2):128. https://doi.org/10.3390/app7020128
Chicago/Turabian StyleChen, Huanguo, Pei Chen, Wenhua Chen, Chuanyu Wu, Jianmin Li, and Jianwei Wu. 2017. "Wind Turbine Gearbox Fault Diagnosis Based on Improved EEMD and Hilbert Square Demodulation" Applied Sciences 7, no. 2: 128. https://doi.org/10.3390/app7020128
APA StyleChen, H., Chen, P., Chen, W., Wu, C., Li, J., & Wu, J. (2017). Wind Turbine Gearbox Fault Diagnosis Based on Improved EEMD and Hilbert Square Demodulation. Applied Sciences, 7(2), 128. https://doi.org/10.3390/app7020128