1. Introduction
As the running speed of high-speed trains increases, aerodynamic noise becomes to be predominant and takes the major part of train noise. Severe noise problem will cause discomfort for the passengers and surrounding people. Furthermore, it will also cause damage to surrounding equipment and buildings. Noise issue becomes a key factor that limits the increase of running speed of high-speed trains, which needs to pay enough attention in the design of new trains [
1].
Current study on aerodynamic noise of high-speed trains mainly focuses on two aspects: On the one hand, identification of noise sources of high-speed trains and mechanism analysis [
2,
3,
4,
5,
6] were performed, aiming at obtaining more precise acoustic structures of high-speed trains. Talotte presents a critical survey of the identification and modeling of railway noise sources and summarizes the current knowledge of the physical source phenomena [
2,
3]. Sun numerically analyzes the main noise sources of high-speed trains, quantitatively compares the different noise sources and identifies the main noise sources, such as the leading streamline, the inter-coach spacing, the bogie zone and the wake zone as well [
4,
6]. Noger performed an investigation on acoustic production mechanisms in the TGV (which is short from the French words “train à grande vitesse”) pantograph recess to be able to reduce the radiated noise [
5]. Until now, the study on aerodynamic noise mechanism has gradually matured. On the other hand, many studies focus on noise reduction of specific components to meet practical usage [
6,
7,
8,
9,
10]. In order to obtain low noise pantograph, Ikada proposes a precise rail pantograph design method that provides both aerodynamic and aero-acoustic sound designs more quickly and economically [
7,
8]. West Japan Railway Co. made an investigation to find an optimum shape of the front bulkhead of the pantograph cover and at the same time actively pursues development of a wing-shaped pantograph which causes less aerodynamic noise. Iwamoto and Higashi made a technical view from results of their tests using the actual railcar and the wind test tunnel [
9]. Sueki proposed a new aerodynamic noise reduction method that involves covering the surface of objects with a particular porous material [
10]. Sun investigated on different designs of cab windows and cowcatchers and gave a reasonable advice on low noise design of the streamlined shape [
6]. It can be seen that much effort has been put to the design of low-noise pantograph, which engineering experience is mostly dependent on for noise reduction. This kind of design is usually constrained by engineering experience and cannot obtain the most optimal shape. In addition, study on the noise reduction of the streamlined head of high-speed trains could be seldom referred to, since abundant flow phenomena exist on the surface of the streamline and the design approach which relies solely on engineering experience could not meet the accuracy requirement. Consequently, optimization design with corresponding algorithms is the only way to obtain the relationships between design variables and aerodynamic noise and gets the chance to obtain the optimal design.
In recent years, optimization algorithms have been widely used in the streamlined shape design of high-speed trains [
11,
12,
13,
14,
15,
16]. Lee and Kim dealt with the nose shape design of high-speed railways to minimize the maximum micro-pressure wave and suggested an optimal nose shape that is an improvement over current design in terms of micro-pressure wave [
11]. Vytla used the Kriging model to find the optimum shape of a two-dimensional nose shape of a high-speed train traveling at 350 km/h considering both the induced aerodynamic drag and the generated aerodynamic noise [
12]. Ku used the VMF parameterization method on the train nose to reduce a micro-pressure wave and an aerodynamic drag of a high-speed train [
13]. Yao performed a constrained multi-objective optimization design on a simplified CRH380A high-speed train with three carriages to optimize aerodynamic drag of the total train and aerodynamic lift of the trailing car and got agreeable optimal results [
14]. Suzuki and Nakade presented a novel design technique for high-speed trains using a multi-objective optimization method to balance plural aerodynamic properties [
15]. Muñoz-Paniagua used genetic algorithms to optimize the nose shape of a high-speed train entering a tunnel in term of the compression wave generated at the entry of the train and the aerodynamic drag of the train [
16]. It could be concluded that the optimization objectives are mostly focused on the aerodynamic loads or tunnel effects. Even aerodynamic noise is considered, it is only a two-dimensional study. Due to the massive cost of computational aero-acoustics (CAA), aerodynamic noise optimization always seems untouchable for researchers. In order to perform aerodynamic noise optimization, two problems have to be solved in advance: On the one hand, the efficiency of CAA calculation has to be improved, which means proper CAA algorithm should be determined to adapt the computing scale for high-speed trains; On the other hand, assessment of the noise level in the far field should be determined. Once the above problems have been solved, the aerodynamic noise optimization becomes feasible. It is very crucial to construct an aerodynamic noise optimization strategy for practical streamlined shape of high-speed trains.
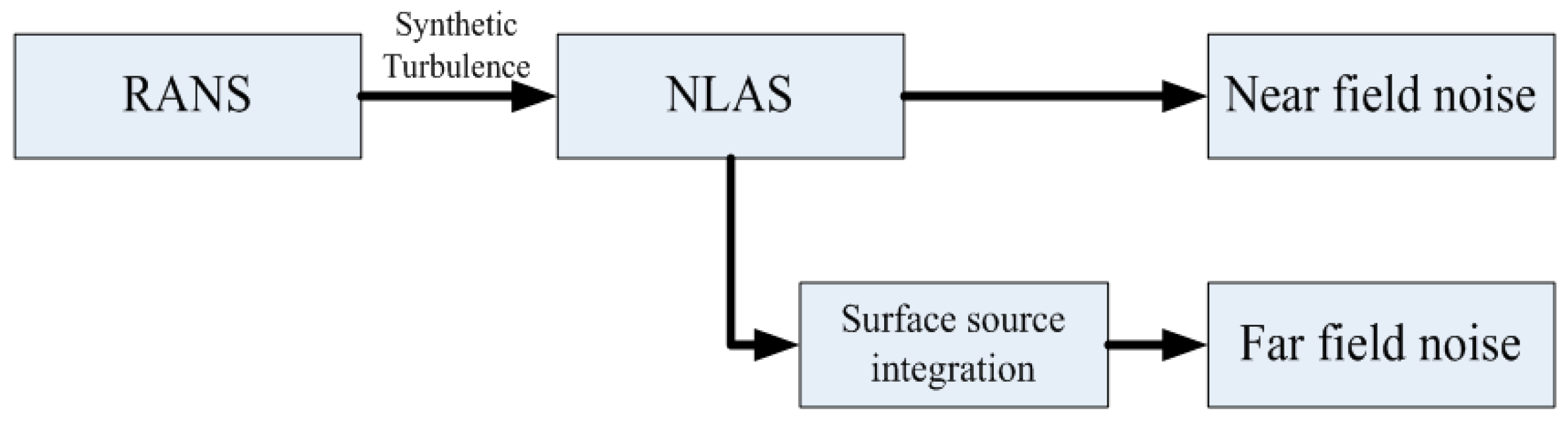
In the present paper, the authors present an aerodynamic noise optimization strategy for practical streamlined shape of high-speed trains. The NLAS approach [
17] has been adopted to perform CAA analysis for each design sample. Meanwhile, the equivalent continuous SPL has been introduced to take all of the far field observation probes into consideration and taken as one objective for multi-objective optimization. With the use of Kriging surrogate model, the aerodynamic noise optimization of the streamlined shape of high-speed trains could be performed. In the present study, the noise level in the far field and the drag of the whole train are taken as the objectives. It is mainly based on the following considerations: The aerodynamic drag of high-speed trains can be up to 75% of the total drag at the speed of 300 km/h and the drag characteristics of the trains are directly related to the ability of energy saving and environmental protection. As a result, the aerodynamic drag reduction is very prominent and has become one of the key issues for aerodynamic shape optimization of high-speed trains. Meanwhile, aerodynamic noise increases with the sixth power of the running speed, and would be predominant over mechanical noise when the running speed is over 250 km/h. It is found that simply reducing aerodynamic drag cannot efficiently reduce the aerodynamic noise, indicating that aerodynamic noise optimization has to take aerodynamic noise as one optimization objective.
After optimization, aerodynamic performance of the optimized shape and the prototype shape with three carriages is comparatively analyzed. Finally, sensitivity analysis has been performed, so that the nonlinear relationship between the objectives and design variables could be obtained. Current research pushes forward the cognition on how to reduce the noise level by modifying the streamlined shape of high-speed trains.
3. Local Shape Function Parametric Approach
In this paper, a parametric approach called Local Shape Function (LSF) which is based on FFD method [
24] and NURBS method [
25] has been designed.
The whole processes are as follows:
- (1)
For a given geometry, deformation regions should be divided firstly.
- (2)
Mesh the deformation regions, and obtain the coordinate values of every grid point. In order to keep the smooth transition of the surface, the structural grids have been utilized for mesh discretization, as shown in
Figure 3.
- (3)
Choose the deformation function of each region, which can be selected randomly, but smooth transition between adjacent regions should be ensured.
- (4)
Choose a weight factor for each deformation function, which determines the maximum deformation value of each region.
- (5)
Calculate the increments of coordinates of all grid points by the deformation functions and .
- (6)
Get the coordinates of the deformed shape by summing and the coordinates of the original shape.
- (7)
According to the coordinates of the deformed shape, the deformed surface can be fitted exactly, then a deformation process is done.
In the above process, Step (3) is the most crucial. The deformation surfaces are different from each other due to the different choices of deformation functions. Inappropriate deformation functions will easily lead to irrational deformation surfaces. Trigonometric functions, exponential functions, logarithmic functions, polynomial functions and NURBS functions are all commonly used for deformation functions.
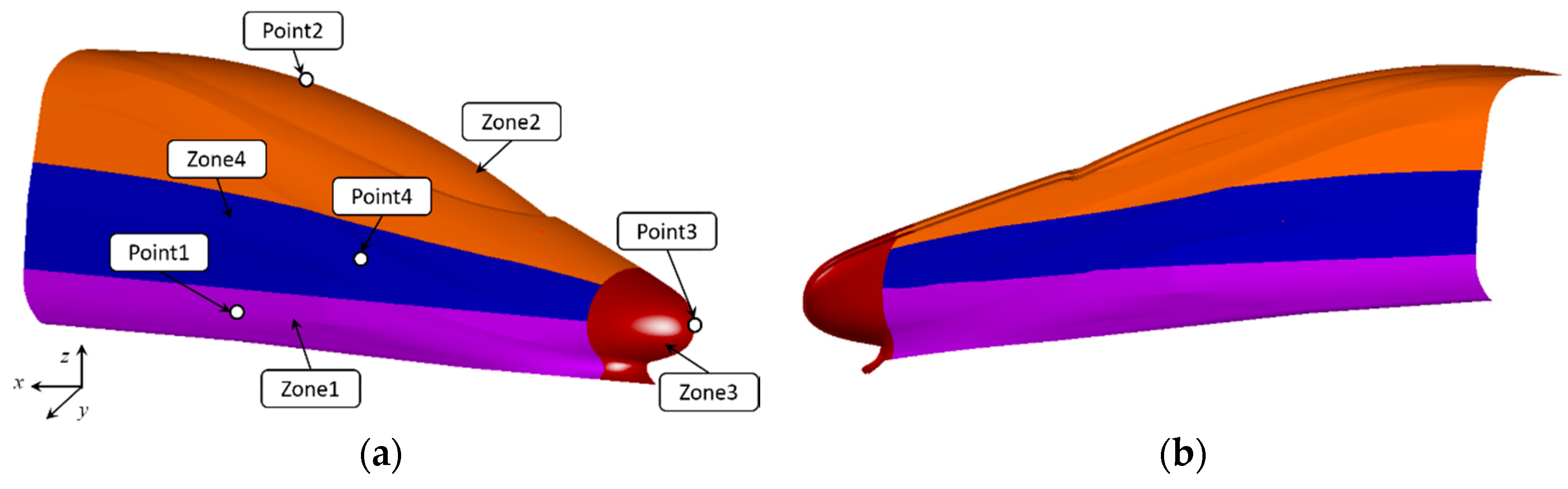
Due to the symmetrical design along the longitude of the train, only one side of the symmetrical plane of the streamline is parameterized. As a result, the design parameters can be reduced by half. The parametric surfaces are separated into four deformation regions, as shown in
Figure 4a. The width of the streamline is controlled by Zone1, and a control point Point1 is set here, extracting its y coordinate as the third design parameter
. The slope of the cab window is controlled by Zone2, and the second control point Point2 is set here, extracting its z coordinate as the fourth design parameter
. Nose height is controlled by Zone3, and another control point Point3 is set here, extracting its z coordinate as the second design parameter
. Nose drainage is controlled by Zone4, and a control point Point4 is set here, extracting its y coordinate as the first design parameter
. For simplicity, all the deformation functions in this paper are trigonometric functions.
Figure 4b shows the deformation in the height of the nose and the cab window. As seen above, the deformation method can ensure the surface smoothness and smooth transition among different deformation regions.
5. Computational Models, Mesh and Conditions
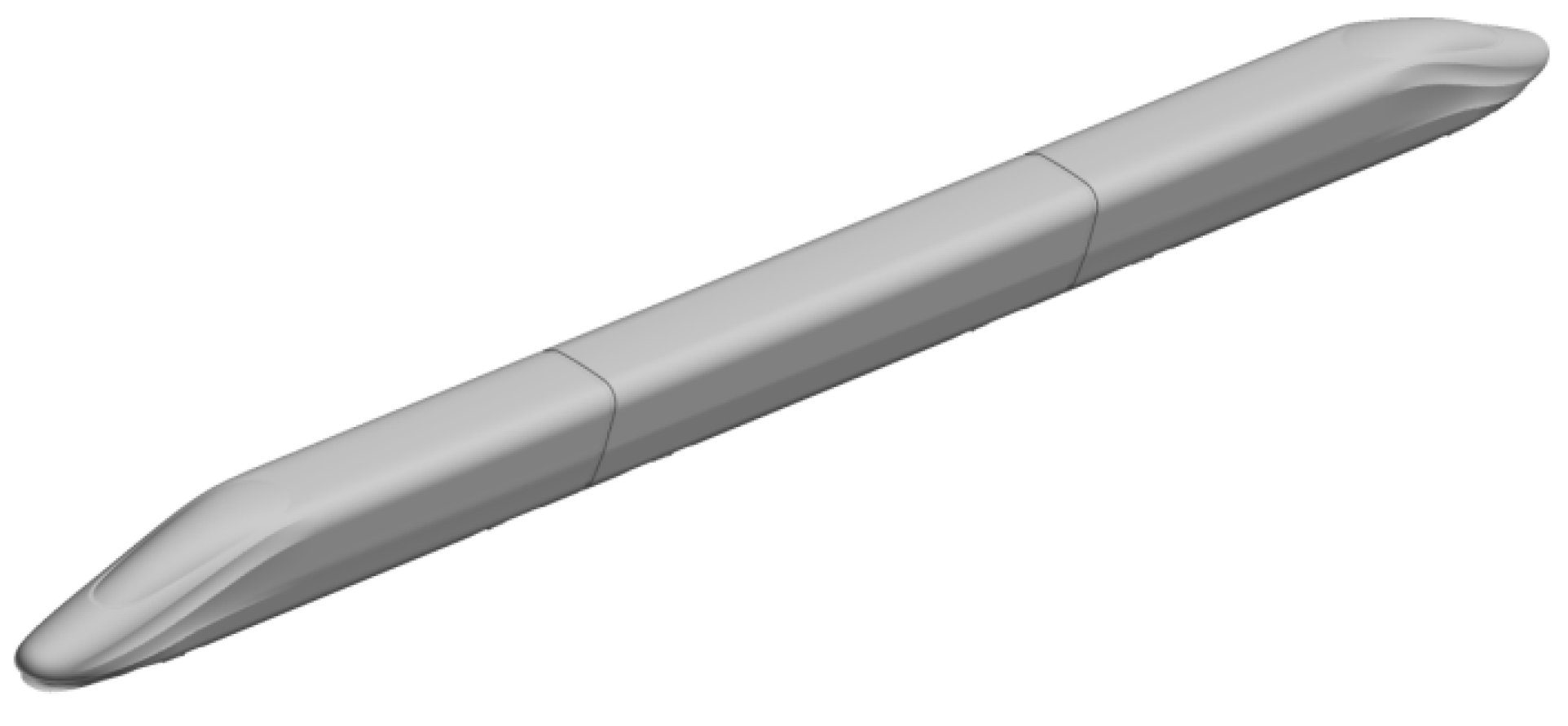
A three-grouping high-speed train model has been adopted in the present paper, which is named as EMU1. The total length of the train is about 78 m and the height of the train is about 4.05 m. The whole train is shown in
Figure 6.
In order to reduce the computational cost, some additional components are eliminated, such as the pantograph. When performing the CFD calculation, components such as the windshields and bogies are reserved. However, since the computational cost of CAA analysis is extremely larger than that of CFD, the windshields and bogies are both neglected to reduce the calculation time, yet the influence of the streamlined shape on acoustic characteristics could still be considered.
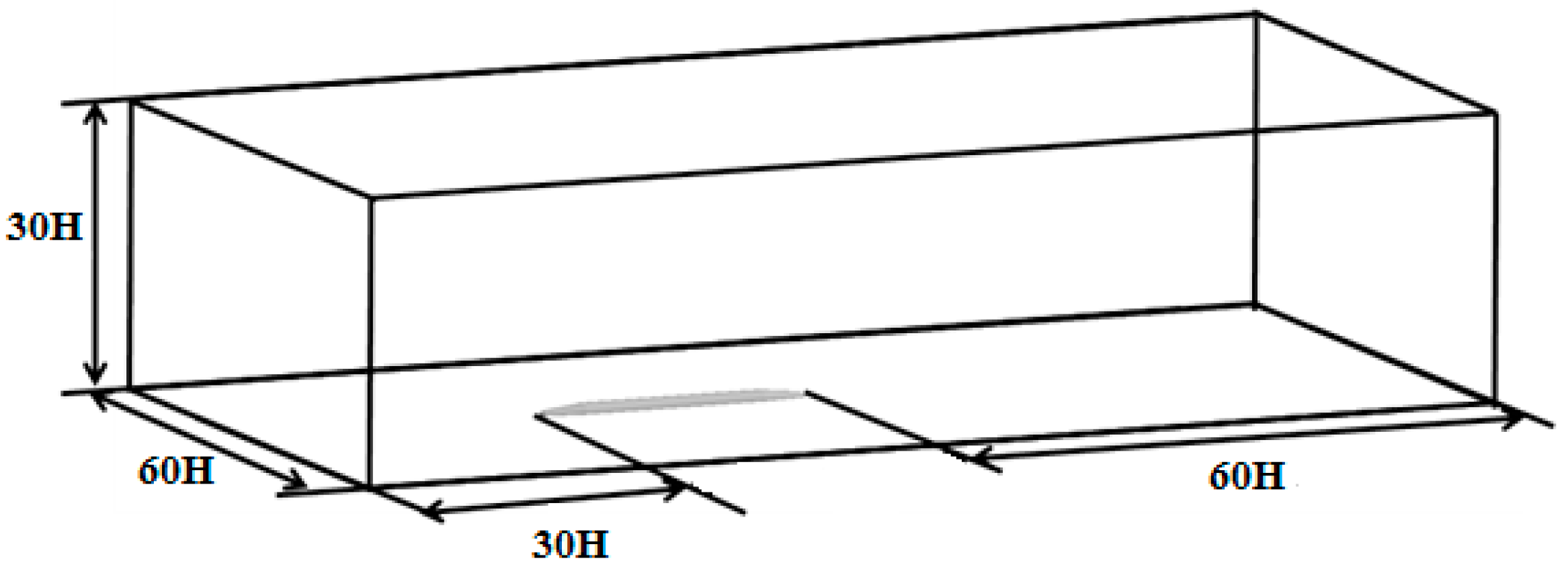
Take the height of the train as the characteristic length H, the computational domain extends 30 H ahead of the train nose and 60 H from the train tail to the exit of the computational domain. The top of the computational domain is at a distance 30 H from the bottom of the rail and the sides are at a distance of 30 H from the center axis of the train, the outline of computational domain and the model are shown in
Figure 7.
The hybrid Cartesian/prism grids is adopted and six layers of prism grids are generated with an increasing ratio of 1.2 and a total length of 30 mm, which keeps the value of
y+ of the first layer near the train surface in a range of 30~100. The total number of the cells is about 32 million.
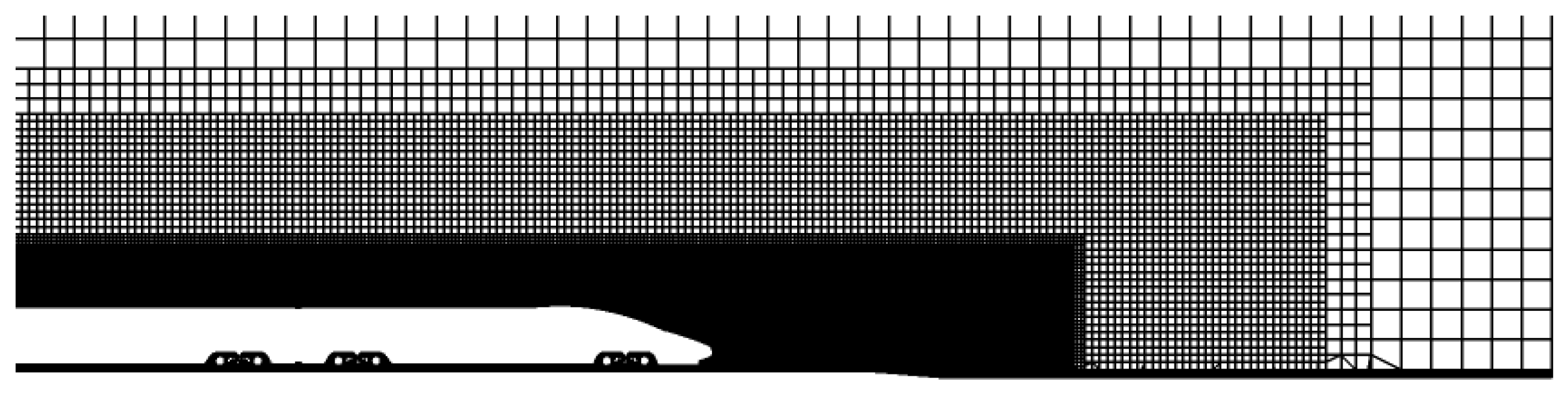
Figure 8 shows the grids on the longitudinal section and on the surface of leading streamline, while
Figure 9 shows the grids on the longitudinal section of wake region.
The flow velocity is 300 km/h; the far-field pressure is 1 atm; the temperature is 288 K; and the reference area is the maximum cross-sectional area of the train. As a result of the compressibility calculation model, one-dimensional inviscid flow of the Riemann invariants is introduced as the far-field boundary conditions, which are also known as non-reflective boundary conditions. Inflow, outflow and the top boundaries are all set as far-field boundary conditions and the train body is non-slip solid wall boundary condition. The ground is treated as the moving wall to simulate the ground effect, and the moving speed is equal to the train speed.
When the NLAS procedure is conducted, three absorbing layers are imposed to the inlet boundary, the outlet boundary and the far field boundary respectively to prevent wave reflections from these boundaries. Two hundred Fourier modes are set to perform synthetic reconstruction for the turbulent fluctuating quantities to capture the sub-grid sources correctly. The time step in NLAS simulation is set to 2 × e−5 s, and the simulated physical time is 0.3 s, which insures that the noise whose frequencies locate between 10–10,000 Hz could be precisely predicted.
After solving the acoustic field in the near field, the far field noise could be obtained with the use of FW-H equation. The observation probes are set according to the ISO-2005-3095 standard, which requires the probes to be 25 m far from the train body and 3.5 m height from the ground. Thirteen probes are placed along the train body with an equal distance of 10 m, which range from the leading head to the trailing streamline, as shown in
Figure 10.
6. Results and Discussion
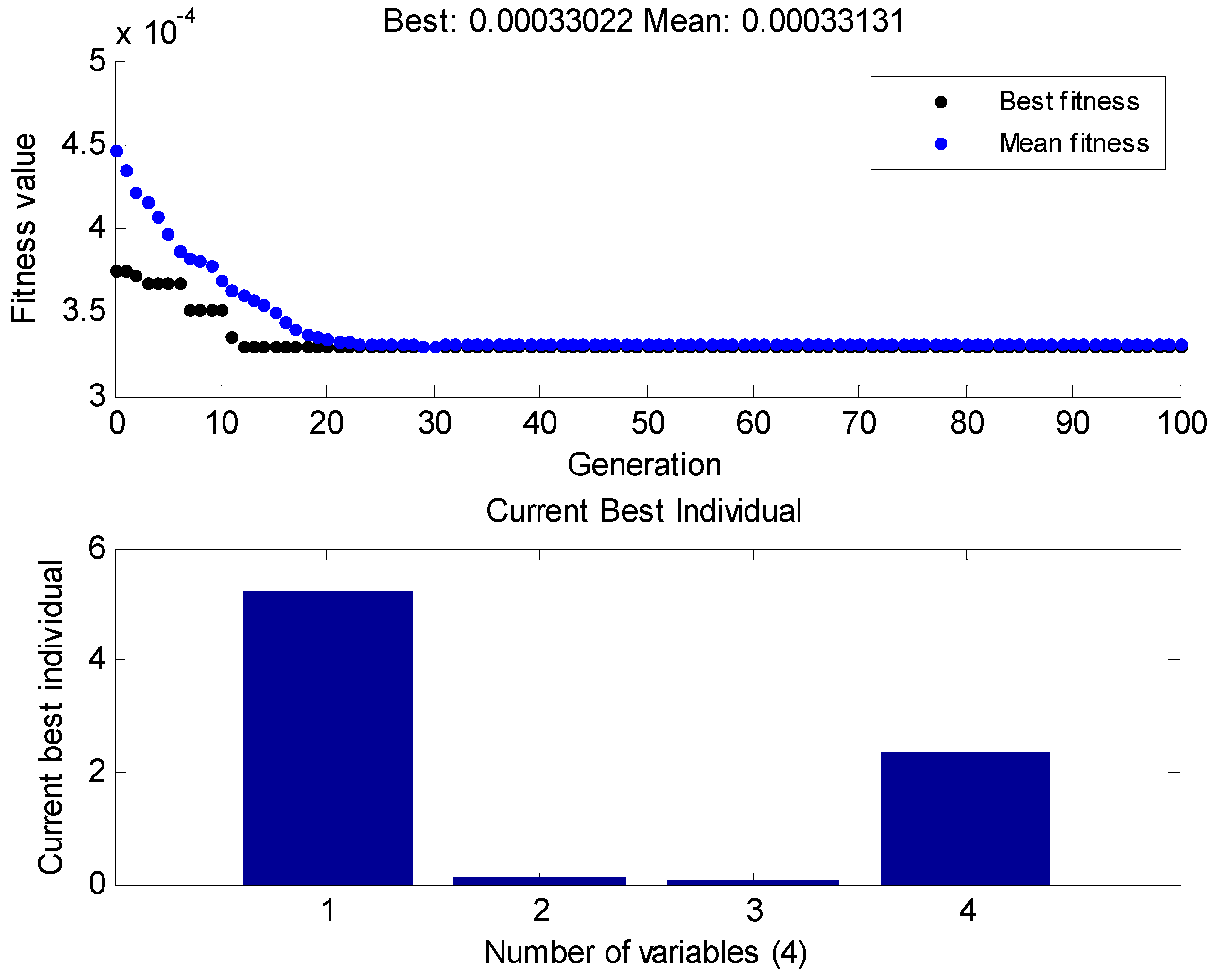
As parameters for GA operation, the size of initial population is set to 100. The probability of crossover is 0.9 while the probability of mutation is set to 0.3. The size of evolution generations is set to 100. The value of
varies from 0 to 10. After adding points for three times, the Kriging model meets the accuracy requirement.
Figure 11 shows the convergence history of the fitness and the exact value for each variable.
The total aerodynamic drag coefficient and the equivalent continuous SPL are treated as the optimization objectives, and the multi-objective optimization of the streamlined shape has been performed on the final built Kriging model. The adaptive genetic approach with a population number of 200 is adopted. Three thousand generations have been performed in the optimization process. The roulette method is used as the selection operator, while the probabilities of crossover and mutation are set as 0.9 and 0.3, respectively.
Figure 12 shows the Pareto set of the two objectives. It can be concluded that the optimal solutions of the objectives are both limited in a small zone, indicating that specific individual in the Pareto set shows no large differences, while all the individuals are better than the initial one. In order to demonstrate the mechanism for aerodynamic performance improvement, a specific individual is chosen randomly in
Figure 12 as an example, just as the red spot shows.
The drag coefficient of the whole train and the equivalent continuous SPL for the prototype of EMU1 are 0.314 and 81.93 dBA, respectively, while the objectives in the Pareto set are all more optimal than those of the prototype.
Table 4 shows the comparison between the CFD calculations and prediction from the Kriging model. It can be seen that excellent agreement exists between the two approaches. The errors for both objectives are 0.493% and 0.027%, respectively, which can meet the engineering requirement. It can be concluded that the Kriging model built in the present paper could reveal the relationships between the design variables and the objectives.
Figure 13 shows the variation of the streamlined shape between the prototype and the optimal result:
As shown above, the green one represents the prototype and the orange one represents the optimal shape. Good smoothness can be observed on the shape after optimization. The width of the bottom of the streamline and the shape of the cowcatcher keep unchanged, while the width of the upper part of the streamline decreases and the heights of the nose and the cab window are both lowered.
Table 5 shows the variations of the design variables compared to the prototype model.
W1 controls the width of the streamline,
W2 controls the height of the cab window,
W3 controls the height of the nose and
W4 controls the width of the drainage. It can be seen that all the design variables get smaller.
Table 6 shows the comparison of the objectives before and after optimization. Results reveal that the aerodynamic performance gets improved for the optimal shape. The drag coefficient and the equivalent continuous SPL are reduced by 7.1% and 1.26 dB, respectively. For the optimization of aerodynamic drag, reducing the inviscid drag plays an important role. As seen in
Table 3, the inviscid drag is reduced by 17.33%.
In order to better understand the aerodynamic performance before and after optimization and investigate on the influence on the specific car by the deformation of streamlined head, the drag coefficients of each carriage before and after optimization are given in
Figure 14:
As shown above, the inviscid drag mainly exists on the leading car and trailing car. The inviscid drag is reduced by 5.2% and 27.6% for the leading car and trailing car, respectively. Meanwhile, the inviscid drag on the middle car is also reduced. The inviscid drag is the main source for drag optimization.
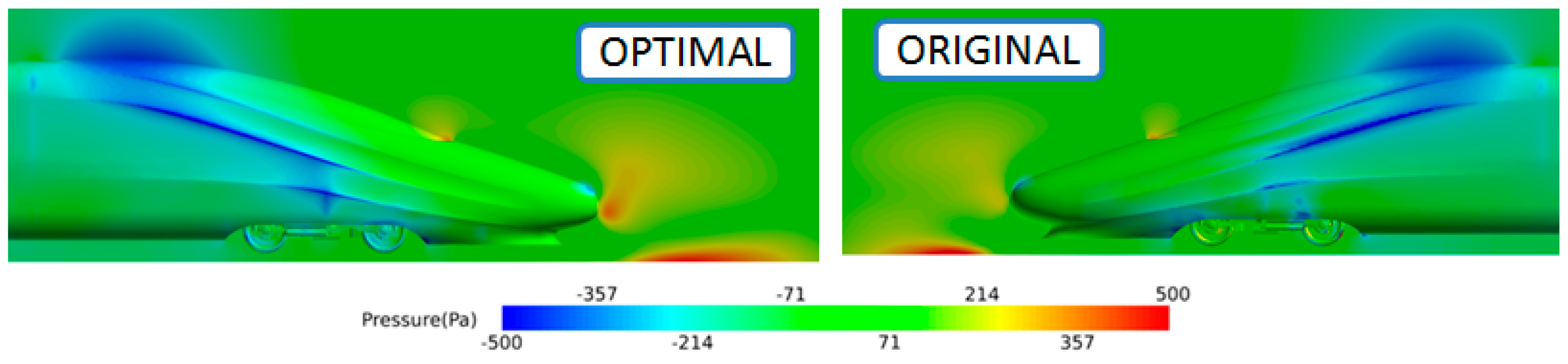
The pressure contour on the leading car before and after optimization is shown in
Figure 15.
The height of the nose is reduced for the optimal model. Consequently, the high-pressure zone in front of the nose varies. The high-pressure zone mainly covers the region between the nose and the cowcatcher. Lower nose leads to a relatively smaller high-pressure zone, which results in a relatively smaller inviscid drag.
The pressure contour on the trailing car before and after optimization is shown in
Figure 16.
An obvious higher-pressure zone behind the trailing nose could be observed for the optimal model, which could provide a thrust on the trailing car. As a result, the inviscid drag on the trailing train could be effectively reduced.
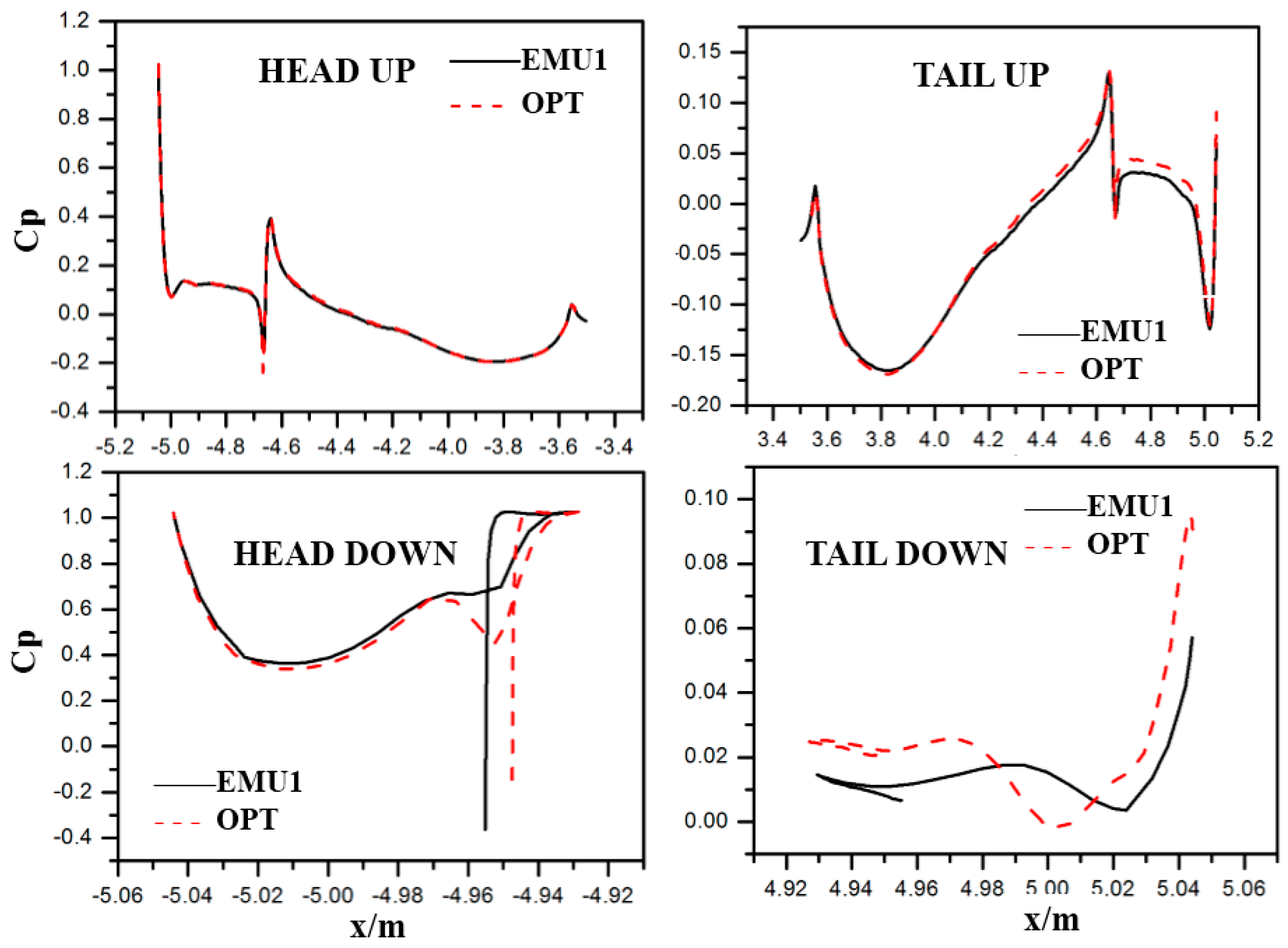
The pressure coefficient along the longitudinal profile of the leading car and trailing car before and after optimization is also investigated, as shown in
Figure 17.
It can be seen that the biggest variation exists at the bottom part of the trailing nose. Higher pressure could be observed along the lower longitudinal profile for the optimal model, which is the root for the relatively lower inviscid drag of the trailing car.
Then, the acoustic characteristics in the far field are analyzed. As mentioned above, the equivalent continuous SPL is reduced by 1.26 dB.
Figure 18 shows the A-weighted overall sound pressure level (OASPLA) of all the probes before and after optimization.
It can be seen that the OASPLAs of most probes for the optimal shape are reduced in a certain extent, compared to the prototype. Results reveal that the noise circumstance in the far field is improved after optimization.
In order to investigate on the influence of each design variable on the optimization objectives, it is necessary to perform the sensitivity analysis for the design variables. Sensitivity analysis is performed by studying the correlations between the design variables and the objectives. The correlation
r between variable
x and
y takes the form:
where
N is the number of pairs of values.
Figure 19 shows the student charts between the objectives and the design variables.
As stated in
Section 3,
W1 represents the width of the cab window,
W2 represents the height of the cab window,
W3 represents the height of the nose, and
W4 represents the width around the drainage. The design space is constrained under the real circumstance. Taking
W3 as an example, it should be not too much smaller or too much larger, or the connection between the hooks of adjacent streamlines could be affected. As seen above,
W4 has the largest influence on both the total drag and the aerodynamic noise. Besides,
W1 and
W2 own relatively large influence on the total drag and aerodynamic noise, respectively.
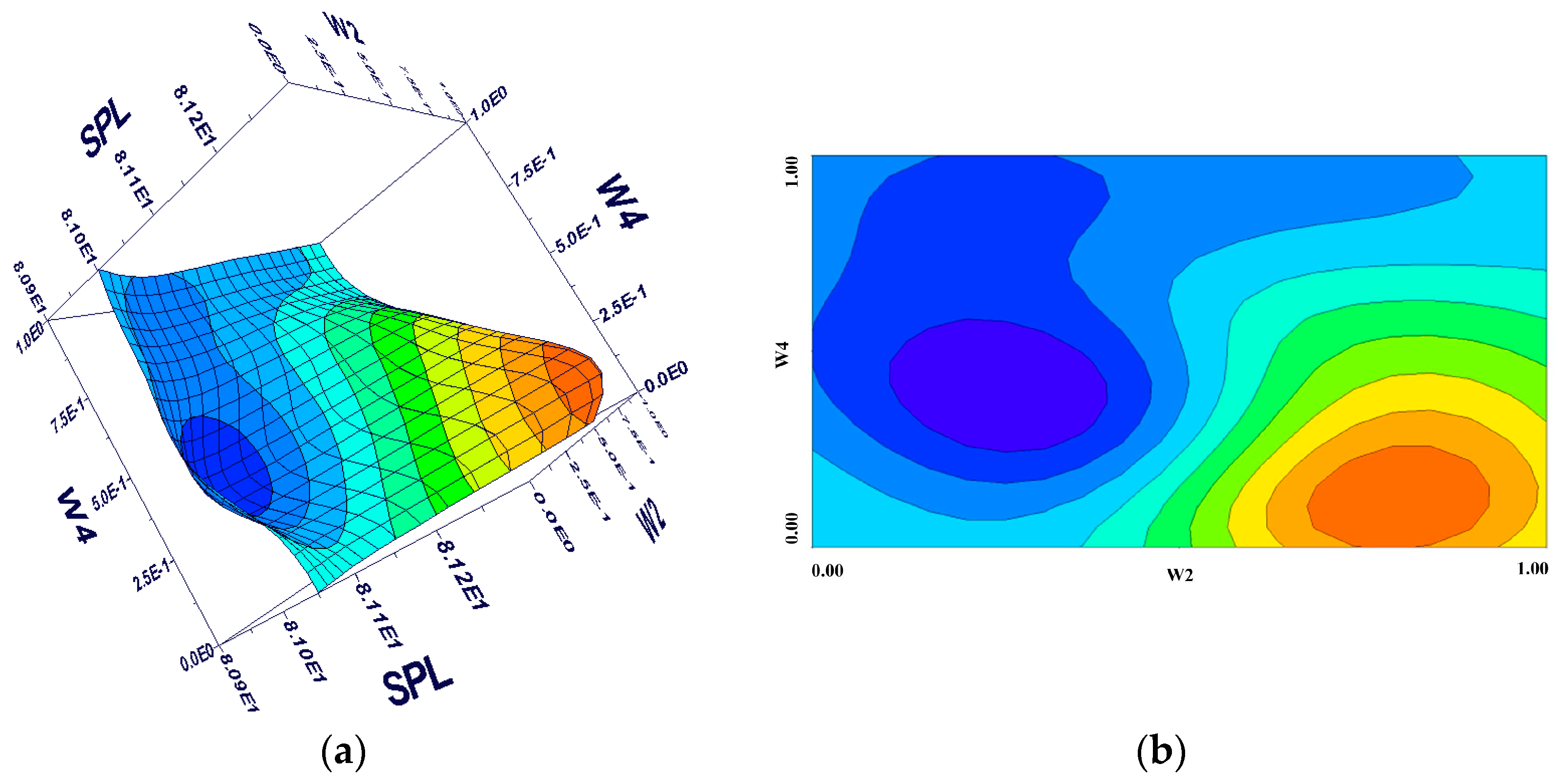
The three-dimensional relationship could also be established on the base of the final surrogate model.
Figure 20a shows the relationship between aerodynamic noise and
W2 and
W4, while
Figure 20b is the projection of aerodynamic noise on the
W2–
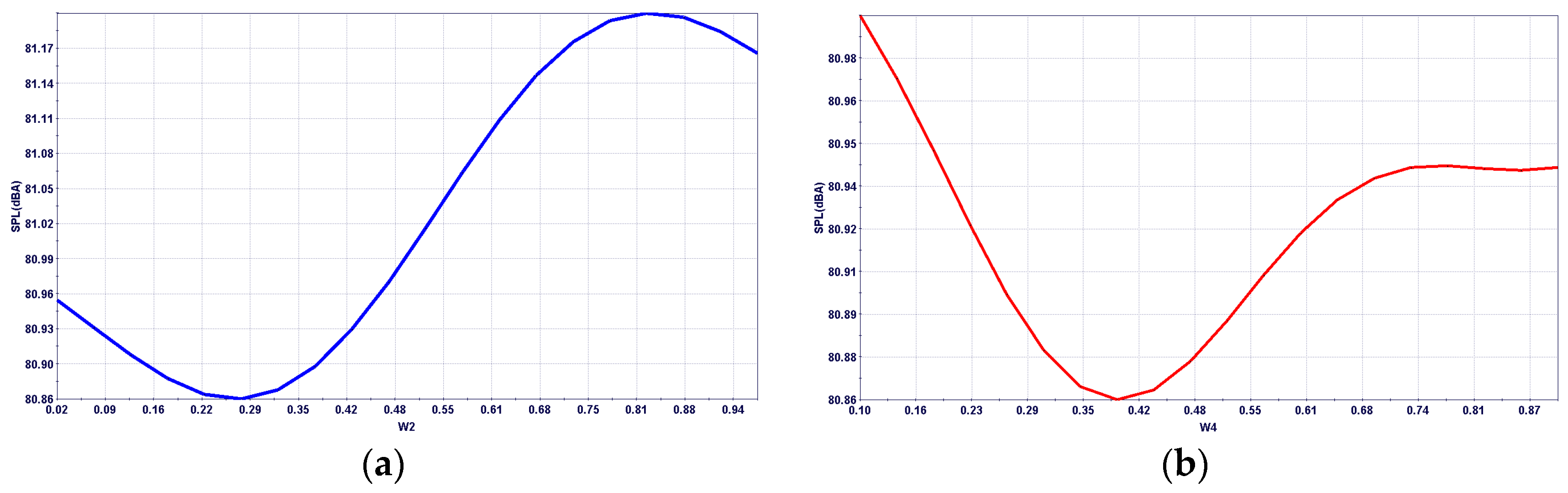
W4 plane. Strong nonlinearity could be observed. To facilitate analysis, we keep one of the design variables unchanged; the relationships of aerodynamic noise and the other design variable could be obtained, as shown in
Figure 21.
Nonlinearity could also be seen in above figures, and best performance of aerodynamic noise does not appear at minimal or maximal values of W2 or W4. For example, it can be deduced from above figures that the width of the drainage could not be too thin or too wide, or aerodynamic noise would grow apparently.



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}