
Detection of Eccentricity Faults in Five-Phase Ferrite-PM Assisted Synchronous Reluctance Machines



Abstract
:1. Introduction
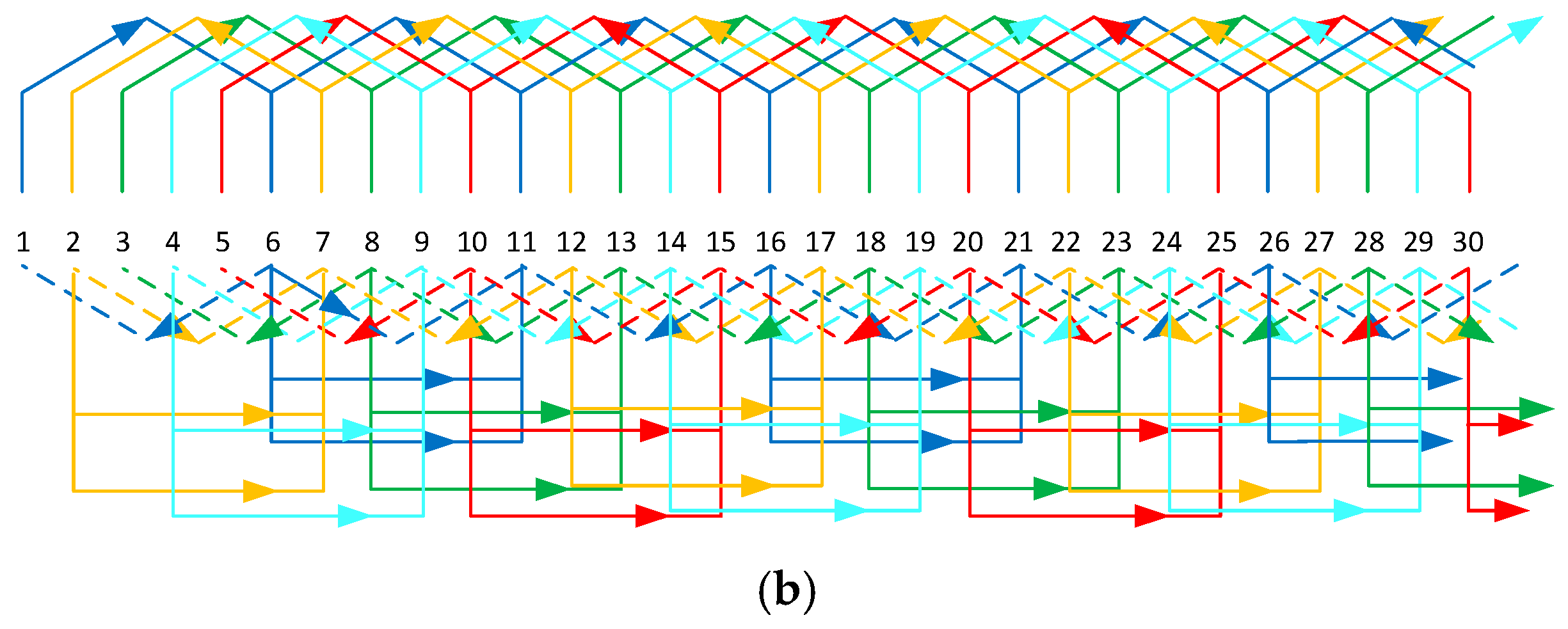
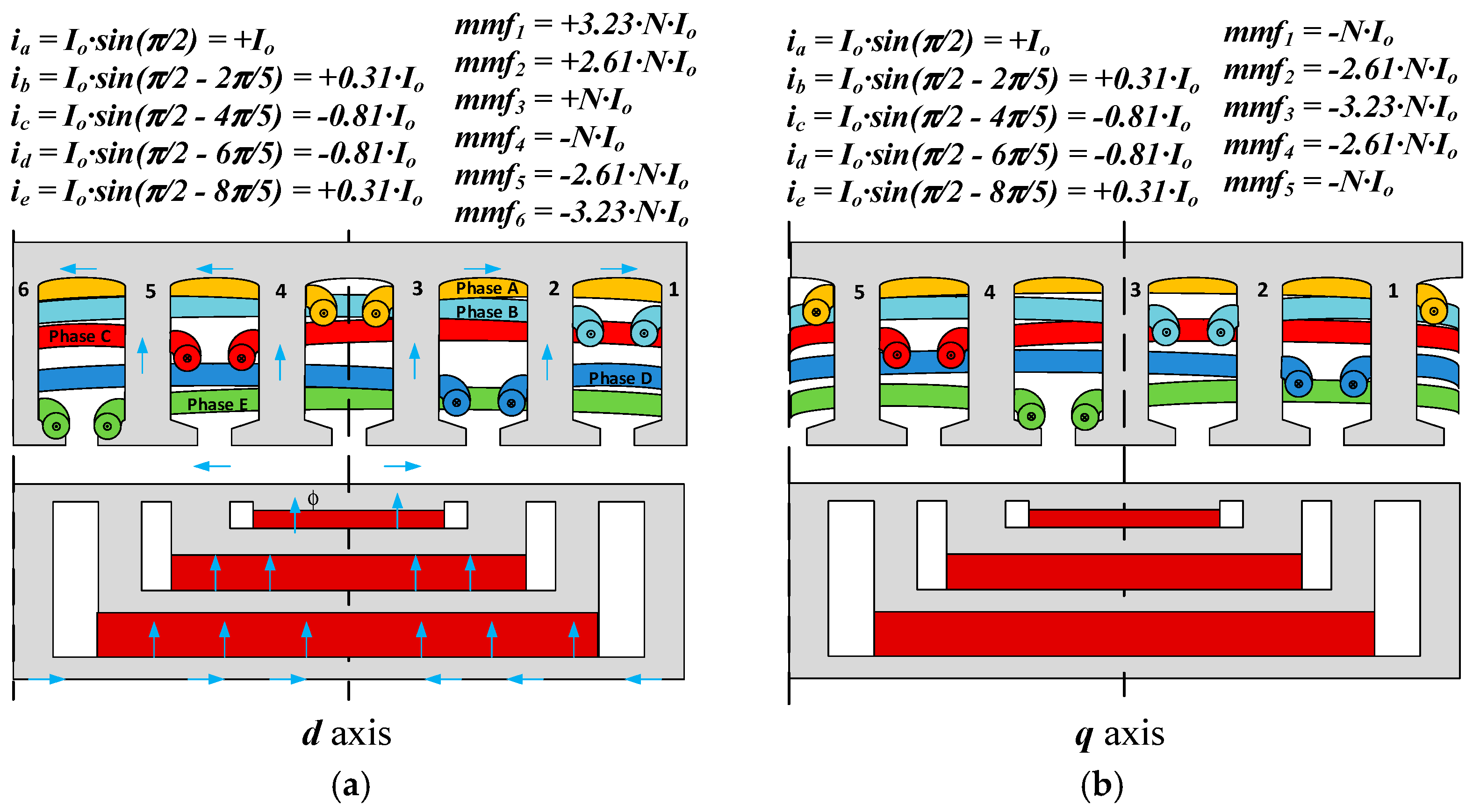
2. The Analyzed Machine
3. Detection of Air Gap Eccentricity Faults in PMa-SynRM from the Stator Currents Spectrum
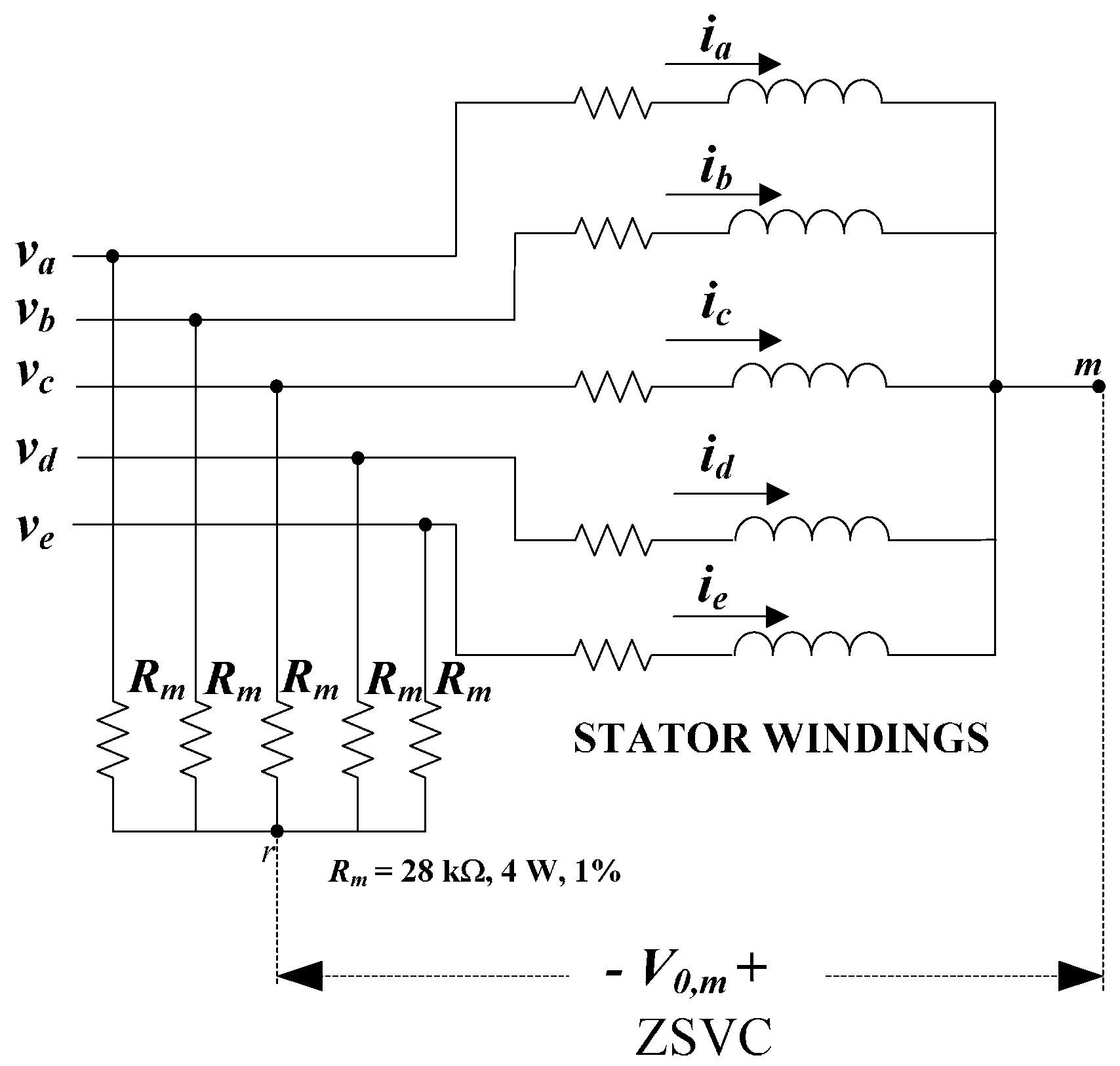
4. Detection of Air Gap Eccentricity Faults in PMa-SynRM from the ZSVC Spectrum
5. Results
5.1. Motor Working under Rated Operating Conditions
5.2. Motor Working under Low-Load (Low-Saturation) Conditions
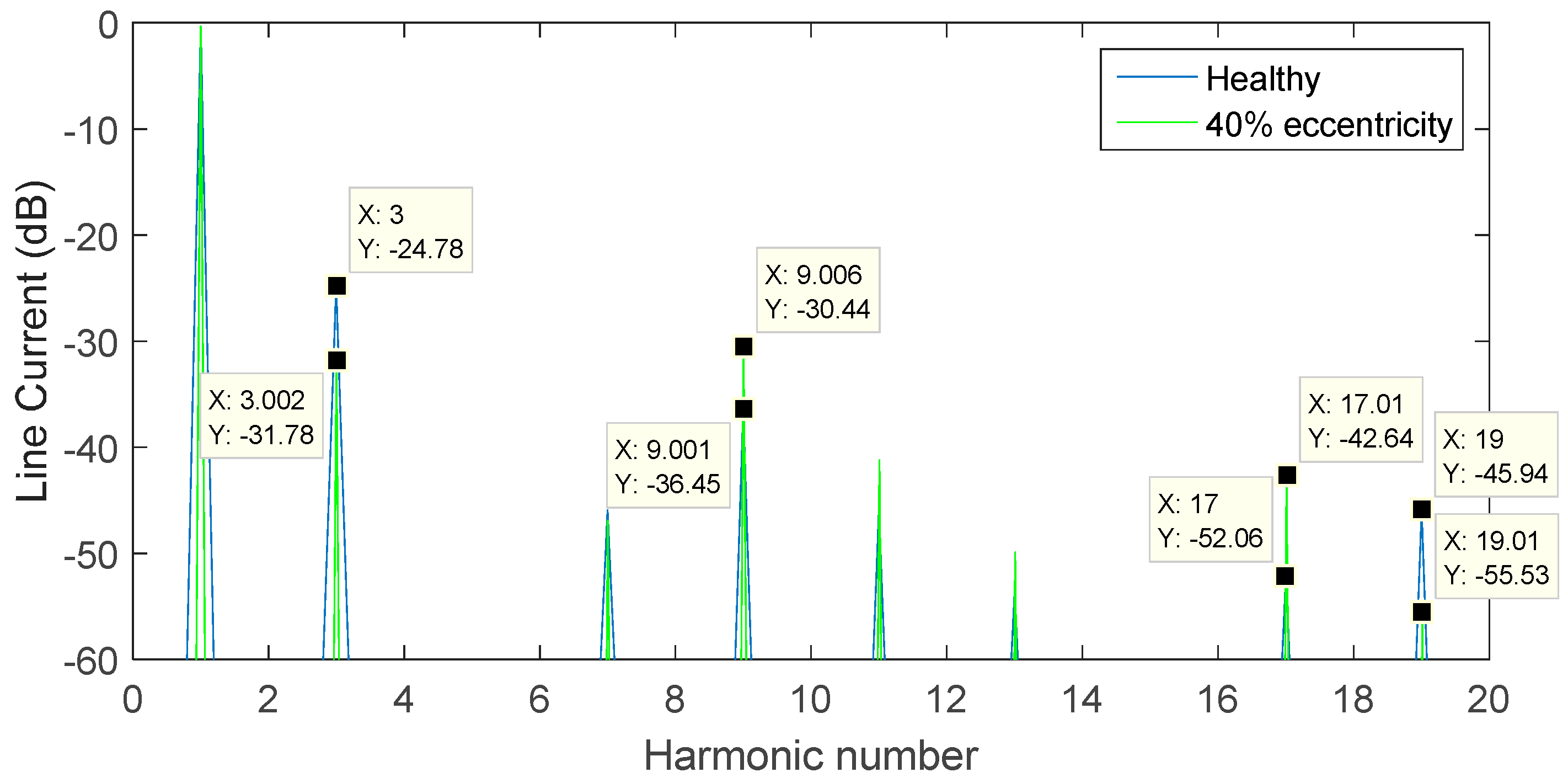
5.3. Motor Working under Low-Load (Low-Saturation) and near d-Position (Current Angle 30°)
5.4. Results Summary
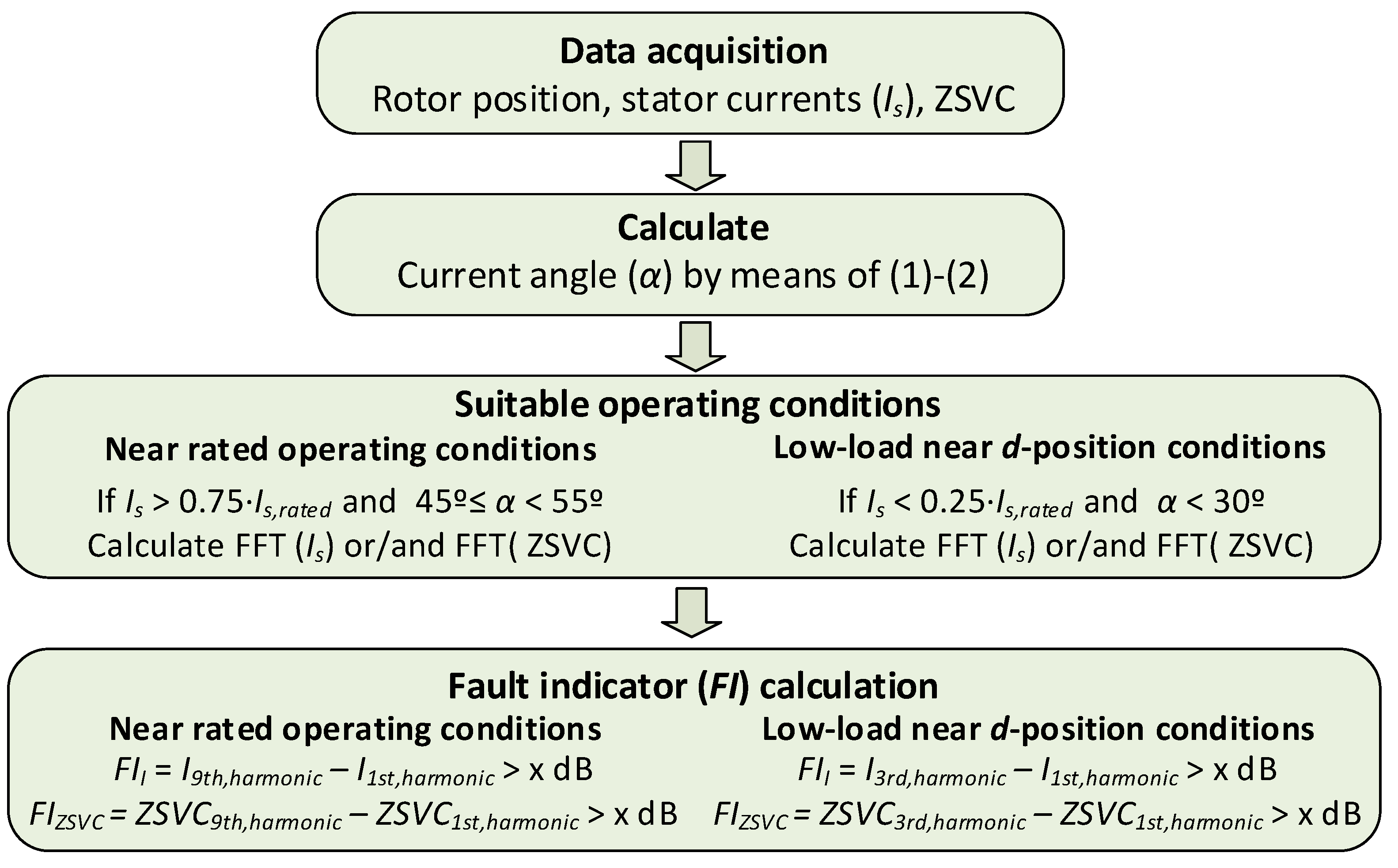
6. The Proposed Fault Indicators
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| N | Number of turns per coil [-] |
| Io | Peak value of the stator current [A] |
| ia,b,c,d,e | Instantaneous value of the phase current [A] |
| id | d-axis current [A] |
| iq | q-axis current [A] |
| va,b,c,d,e | Instantaneous value of the phase voltage [V] |
| vo | Instantaneous value of the homopolar voltage [V] |
| fEccentricity | Harmonic frequency associated to eccentricity faults [Hz] |
| fs | Electrical frequency [Hz] |
| k | Harmonic number [-] |
| p | Pole pairs [-] |
| λa,b,c,d,e | Instantaneous value of the phase magnetic flux [Wb] |
| λPM,0 | Instantaneous value of flux linkage due to the magnets [Wb] |
| Rm | Resistance [Ω] |
| θm | Rotor position [electrical °] |
| α | Current angle [electrical °] |
References
- Riba, J.-R.; López-Torres, C.; Romeral, L.; Garcia, A. Rare-earth-free propulsion motors for electric vehicles: A technology review. Renew. Sustain. Energy Rev. 2016, 57, 367–379. [Google Scholar] [CrossRef]
- Bonthu, S.S.R.; Choi, S.; Baek, J. Design of five-phase permanent magnet assisted synchronous reluctance motor for low output torque ripple applications. IET Electr. Power Appl. 2016, 10, 339–346. [Google Scholar] [CrossRef]
- Bolognani, S.; Mahmoud, H.; Bianchi, N. Fast synthesis of permanent magnet assisted synchronous reluctance motors. IET Electr. Power Appl. 2016, 10, 312–318. [Google Scholar]
- Mahmoud, H.; Bianchi, N. Eccentricity in Synchronous Reluctance Motors-Part I: Analytical and Finite-Element Models. IEEE Trans. Energy Convers. 2015, 30, 745–753. [Google Scholar] [CrossRef]
- Zhao, W.; Chen, D.; Lipo, T.A.; Kwon, B.-I. Performance Improvement of Ferrite-Assisted Synchronous Reluctance Machines Using Asymmetrical Rotor Configurations. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar]
- Gupta, R.A.; Wadhwani, A.K.; Kapoor, S.R. Early Estimation of Faults in Induction Motors Using Symbolic Dynamic-Based Analysis of Stator Current Samples. IEEE Trans. Energy Convers. 2011, 26, 102–114. [Google Scholar] [CrossRef]
- Akar, M. Detection of a static eccentricity fault in a closed loop driven induction motor by using the angular domain order tracking analysis method. Mech. Syst. Signal Process. 2013, 34, 173–182. [Google Scholar] [CrossRef]
- Urresty, J.-C.; Atashkhooei, R.; Riba, J.-R.; Romeral, L.; Royo, S. Shaft Trajectory Analysis in a Partially Demagnetized Permanent-Magnet Synchronous Motor. IEEE Trans. Ind. Electron. 2013, 60, 3454–3461. [Google Scholar] [CrossRef]
- Climente-Alarcon, V.; Antonino-Daviu, J.A.; Riera-Guasp, M.; Puche-Panadero, R.; Escobar, L. Application of the Wigner–Ville distribution for the detection of rotor asymmetries and eccentricity through high-order harmonics. Electr. Power Syst. Res. 2012, 91, 28–36. [Google Scholar] [CrossRef]
- Ebrahimi, B.M.; Faiz, J.; Araabi, B.N. Pattern identification for eccentricity fault diagnosis in permanent magnet synchronous motors using stator current monitoring. IET Electr. Power Appl. 2010, 4, 418–430. [Google Scholar] [CrossRef]
- Ebrahimi, B.M.; Faiz, J.; Roshtkhari, M.J. Static-, Dynamic-, and Mixed-Eccentricity Fault Diagnoses in Permanent-Magnet Synchronous Motors. IEEE Trans. Ind. Electron. 2009, 56, 4727–4739. [Google Scholar] [CrossRef]
- Glowacz, A.; Glowacz, Z. Diagnosis of stator faults of the single-phase induction motor using acoustic signals. Appl. Acoust. 2017, 117, 20–27. [Google Scholar] [CrossRef]
- Glowacz, A. Diagnostics of Rotor Damages of Three-Phase Induction Motors Using Acoustic Signals and SMOFS-20-EXPANDED. Arch. Acoust. 2016, 41, 507–515. [Google Scholar] [CrossRef]
- Glowacz, A.; Glowacz, Z. Diagnostics of stator faults of the single-phase induction motor using thermal images, MoASoS and selected classifiers. Measurement 2016, 93, 86–93. [Google Scholar] [CrossRef]
- Giantomassi, A.; Ferracuti, F.; Iarlori, S.; Ippoliti, G.; Longhi, S. Electric Motor Fault Detection and Diagnosis by Kernel Density Estimation and KKullback–Leibler Divergence Based on Stator Current Measurements. IEEE Trans. Ind. Electron. 2015, 62, 1770–1780. [Google Scholar] [CrossRef]
- Choi, S.; Haque, M.S.; Arafat, A.; Toliyat, H. Detection and Estimation of Extremely Small Fault Signature by Utilizing Multiple Current Sensor Signals in Multiphase Electric Machines. IEEE Trans. Ind. Appl. 2017, 1. [Google Scholar] [CrossRef]
- Bouzida, A.; Touhami, O.; Ibtiouen, R.; Belouchrani, A.; Fadel, M.; Rezzoug, A. Fault Diagnosis in Industrial Induction Machines Through Discrete Wavelet Transform. IEEE Trans. Ind. Electron. 2011, 58, 4385–4395. [Google Scholar] [CrossRef]
- Ilamparithi, T.; Nandi, S. Analysis, modeling and simulation of static eccentric reluctance synchronous motor. In Proceedings of the 8th IEEE Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives, Bologna, Italy, 5–8 Septembre 2011; IEEE: New York, NY, USA, 2011; pp. 45–50. [Google Scholar]
- Lee, S.B.; Hyun, D.; Kang, T.; Yang, C.; Shin, S.; Kim, H.; Park, S.; Kong, T.-S.; Kim, H.-D. Identification of False Rotor Fault Indications Produced by Online MCSA for Medium-Voltage Induction Machines. IEEE Trans. Ind. Appl. 2016, 52, 729–739. [Google Scholar]
- Saavedra, H.; Urresty, J.-C.; Riba, J.-R.; Romeral, L. Detection of interturn faults in PMSMs with different winding configurations. Energy Convers. Manag. 2014, 79, 534–542. [Google Scholar] [CrossRef]
- Urresty, J.-C.; Riba, J.-R.; Romeral, L. Influence of the stator windings configuration in the currents and zero-sequence voltage harmonics in permanent magnet synchronous motors with demagnetization faults. IEEE Trans. Magn. 2013, 49, 4885–4893. [Google Scholar] [CrossRef]
- Siddiqui, K.M.; Sahay, K.; Giri, V.K.; Gothwal, N. Diagnosis of airgap eccentricity fault in the inverter driven induction motor drives by transformative techniques. Perspect. Sci. 2016, 8, 127–131. [Google Scholar] [CrossRef]
- Ebrahimi, B.M.; Javan Roshtkhari, M.; Faiz, J.; Khatami, S.V. Advanced Eccentricity Fault Recognition in Permanent Magnet Synchronous Motors Using Stator Current Signature Analysis. IEEE Trans. Ind. Electron. 2014, 61, 2041–2052. [Google Scholar] [CrossRef]
- Mahmoud, H.; Bianchi, N. Eccentricity in Synchronous Reluctance Motors-Part II: Different Rotor Geometry and Stator Windings. IEEE Trans. Energy Convers. 2015, 30, 754–760. [Google Scholar] [CrossRef]
- Pazouki, E.; Islam, M.Z.; Bonthu, S.S.R.; Choi, S. Eccentricity fault detection in multiphase permanent magnet assisted synchronous reluctance motor. In Proceedings of the 2015 IEEE International Electric Machines & Drives Conference (IEMDC), Coeur d’Alene, ID, USA, 10–13 May 2015; IEEE: New York, NY, USA, 2015; pp. 240–246. [Google Scholar]
- Yang, X.; Kou, B.; Luo, J.; Zhou, Y.; Xing, F. Torque Characteristic Analysis of a Transverse Flux Motor Using a Combined-Type Stator Core. Appl. Sci. 2016, 6, 342. [Google Scholar] [CrossRef]
- Saavedra, H.; Riba, J.-R.; Romeral, L. Multi-objective Optimal Design of a Five-Phase Fault-Tolerant Axial Flux PM Motor. Adv. Electr. Comput. Eng. 2015, 15, 69–76. [Google Scholar] [CrossRef]
- Ilamparithi, T.C.; Nandi, S. Detection of Eccentricity Faults in Three-Phase Reluctance Synchronous Motor. IEEE Trans. Ind. Appl. 2012, 48, 1307–1317. [Google Scholar] [CrossRef]
- Romeral, L.; Urresty, J.C.; Riba Ruiz, J.R.; Garcia Espinosa, A. Modeling of surface-mounted permanent magnet synchronous motors with stator winding interturn faults. IEEE Trans. Ind. Electron. 2011, 58, 1576–1585. [Google Scholar] [CrossRef]
- Ebrahimi, B.M.; Faiz, J. Configuration Impacts on Eccentricity Fault Detection in Permanent Magnet Synchronous Motors. IEEE Trans. Magn. 2012, 48, 903–906. [Google Scholar] [CrossRef]
- Faiz, J.; Ebrahimi, B.M. Static Eccentricity Fault Diagnosis in an accelerating no-load three-phase saturated squirrel-cage induction motor. Prog. Electromagn. Res. B 2008, 10, 35–54. [Google Scholar] [CrossRef]
- Welchko, B.A.; Lipo, T.A.; Jahns, T.M.; Schulz, S.E. Fault Tolerant Three-Phase AC Motor Drive Topologies: A Comparison of Features, Cost, and Limitations. IEEE Trans. Power Electron. 2004, 19, 1108–1116. [Google Scholar] [CrossRef]
- Wallmark, O.; Harnefors, L.; Carlson, O. Control Algorithms for a Fault-Tolerant PMSM Drive. IEEE Trans. Ind. Electron. 2007, 54, 1973–1980. [Google Scholar] [CrossRef]
- Urresty, J.-C.; Riba, J.-R.; Romeral, L. A back-emf based method to detect magnet failures in PMSMs. IEEE Trans. Magn. 2013, 49, 591–598. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Features | Value |
|---|---|
| Rated power (kW) | 3.5 |
| Rated torque (N·m) | 5.7 |
| Rated speed (rev/min) | 5000 |
| Rated current (ARMS) | 4 |
| Rated voltage (VRMS) | 240 |
| Number of phases | 5 |
| Number of slots | 60 |
| Pole pairs (p) | 12 |
| Slots/pole/phase (q) | 1 |
| Conductors per slot | 60 |
| Layer type | Double layer |
| Airgap width (mm) | 0.3 |
| Permanent magnets | Ferrite HF 30/26 |
| Magnetic steel | M330-35A |
| d-axis inductance (Ld, mH) | 59.7no_current−15.9max_current |
| q-axis inductance (Lq, mH) | 15.2no_current−11.8max_current |
| Harmonic | 1 | 3 | 5 | 7 | 9 | 11 | 13 | 15 | 17 | 19 |
|---|---|---|---|---|---|---|---|---|---|---|
| Rated operating conditions | ||||||||||
| Healthy (dB) | −0.34 | −16.91 | - | −24.04 | −38.25 | −42.07 | −39.00 | - | −43.31 | −54.96 |
| Faulty (dB) | −0.78 | −16.82 | - | −23.76 | −34.92 | −42.87 | −37.80 | - | −48.31 | −57.15 |
| ∆dB | 0.44 | −0.09 | - | −0.28 | −3.33 | 0.80 | −1.20 | - | 5.00 | 2.19 |
| Low-load conditions | ||||||||||
| Healthy (dB) | −0.39 | −28.33 | - | −43.24 | −30.06 | −39.83 | −58.81 | - | −41.99 | - |
| Faulty (dB) | −0.40 | −28.08 | - | −42.34 | −29.85 | −39.88 | −57.00 | - | −41.98 | −59.54 |
| ∆dB | 0.01 | −0.25 | - | −0.90 | −0.21 | 0.05 | −1.81 | - | −0.01 | 59.54 |
| Low-load near d-position conditions (Current Angle 30°) | ||||||||||
| Healthy (dB) | −0.40 | −24.78 | - | −45.93 | −36.45 | −45.89 | −53.65 | - | −52.06 | −45.94 |
| Faulty (dB) | −0.38 | −31.78 | - | −46.94 | −30.44 | −41.21 | −49.89 | - | −42.64 | −55.53 |
| ∆dB | −0.08 | −7.00 | - | 1.01 | −6.01 | −4.68 | −3.76 | - | −9.42 | 9.59 |
| Harmonic | 1 | 3 | 5 | 7 | 9 | 11 | 13 | 15 | 17 | 19 |
|---|---|---|---|---|---|---|---|---|---|---|
| Rated operating conditions | ||||||||||
| Healthy (dB) | −1.31 | −12.61 | −20.11 | −33.85 | −34.70 | −44.29 | −36.13 | −41.51 | −55.21 | −40.73 |
| Faulty (dB) | −2.36 | −13.96 | −21.17 | −40.13 | −52.41 | −35.26 | −39.82 | −46.52 | −51.38 | −51.86 |
| ∆dB | 1.05 | 1.35 | 1.06 | 6.28 | 17.71 | −9.03 | 3.69 | 5.52 | −3.83 | 11.13 |
| Low-load conditions | ||||||||||
| Healthy (dB) | −5.95 | −9.89 | −7.09 | −17.98 | −39.85 | −51.57 | −36.13 | −54.42 | −51.91 | -- |
| Faulty (dB) | −6.12 | −10.06 | −7.26 | −18.15 | 40.02 | −51.74 | −36.29 | −54.59 | −52.08 | -- |
| ∆dB | 0.17 | 0.17 | 0.17 | 0.17 | 0.17 | 0.17 | 0.17 | 0.16 | 0.17 | -- |
| Low-load near d-position conditions (Current Angle 30°) | ||||||||||
| Healthy (dB) | −4.67 | −5.71 | −12.06 | −22.25 | −36.85 | −51.68 | −39.2 | −41.33 | −55.46 | -- |
| Faulty (dB) | −5.48 | −9.37 | −7.31 | −18.98 | −39.61 | −39.01 | −40.24 | −50.21 | −52.04 | -- |
| ∆dB | 0.81 | −3.66 | −4.75 | −3.27 | 2.76 | −12.67 | −1.04 | −8.88 | −3.42 | -- |
| Harmonic | Fault Indicator (FII) |
|---|---|
| Near rated operating conditions | FII = I9th,harmonic − I1st,harmonic |
| Healthy (dB) | −37.91 |
| Faulty (dB) | −34.14 |
| Threshold value | −35 |
| Low-load near d-position conditions (current angle 30°) | FII = I3rd,harmonic − I1st,harmonic |
| Healthy (dB) | −24.38 |
| Faulty (dB) | −31.40 |
| Threshold value | −31 |
| Harmonic | Fault indicator (FIZSVC) |
|---|---|
| Near rated operating conditions | FIZSVC = ZSVC9th,harmonic − ZSVC1st,harmonic |
| Healthy (dB) | −33.39 |
| Faulty (dB) | −50.05 |
| Threshold value | −48 |
| Low-load near d-position conditions (current angle 30°) | FIZSVC = ZSVC3rd,harmonic − ZSVC1st,harmonic |
| Healthy (dB) | −1.04 |
| Faulty (dB) | −3.89 |
| Threshold value | −3 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
López-Torres, C.; Riba, J.-R.; Garcia, A.; Romeral, L. Detection of Eccentricity Faults in Five-Phase Ferrite-PM Assisted Synchronous Reluctance Machines. Appl. Sci. 2017, 7, 565. https://doi.org/10.3390/app7060565
López-Torres C, Riba J-R, Garcia A, Romeral L. Detection of Eccentricity Faults in Five-Phase Ferrite-PM Assisted Synchronous Reluctance Machines. Applied Sciences. 2017; 7(6):565. https://doi.org/10.3390/app7060565
Chicago/Turabian StyleLópez-Torres, Carlos, Jordi-Roger Riba, Antonio Garcia, and Luís Romeral. 2017. "Detection of Eccentricity Faults in Five-Phase Ferrite-PM Assisted Synchronous Reluctance Machines" Applied Sciences 7, no. 6: 565. https://doi.org/10.3390/app7060565
APA StyleLópez-Torres, C., Riba, J. -R., Garcia, A., & Romeral, L. (2017). Detection of Eccentricity Faults in Five-Phase Ferrite-PM Assisted Synchronous Reluctance Machines. Applied Sciences, 7(6), 565. https://doi.org/10.3390/app7060565