
Measuring the Reflection Matrix of a Rough Surface

Abstract
:
1. Introduction
2. Background
3. Methodology
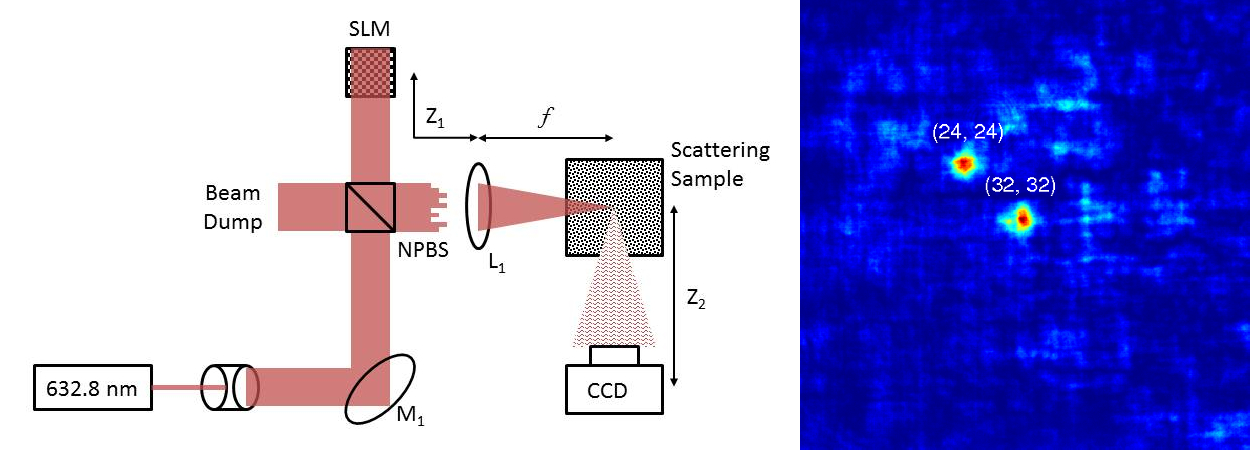
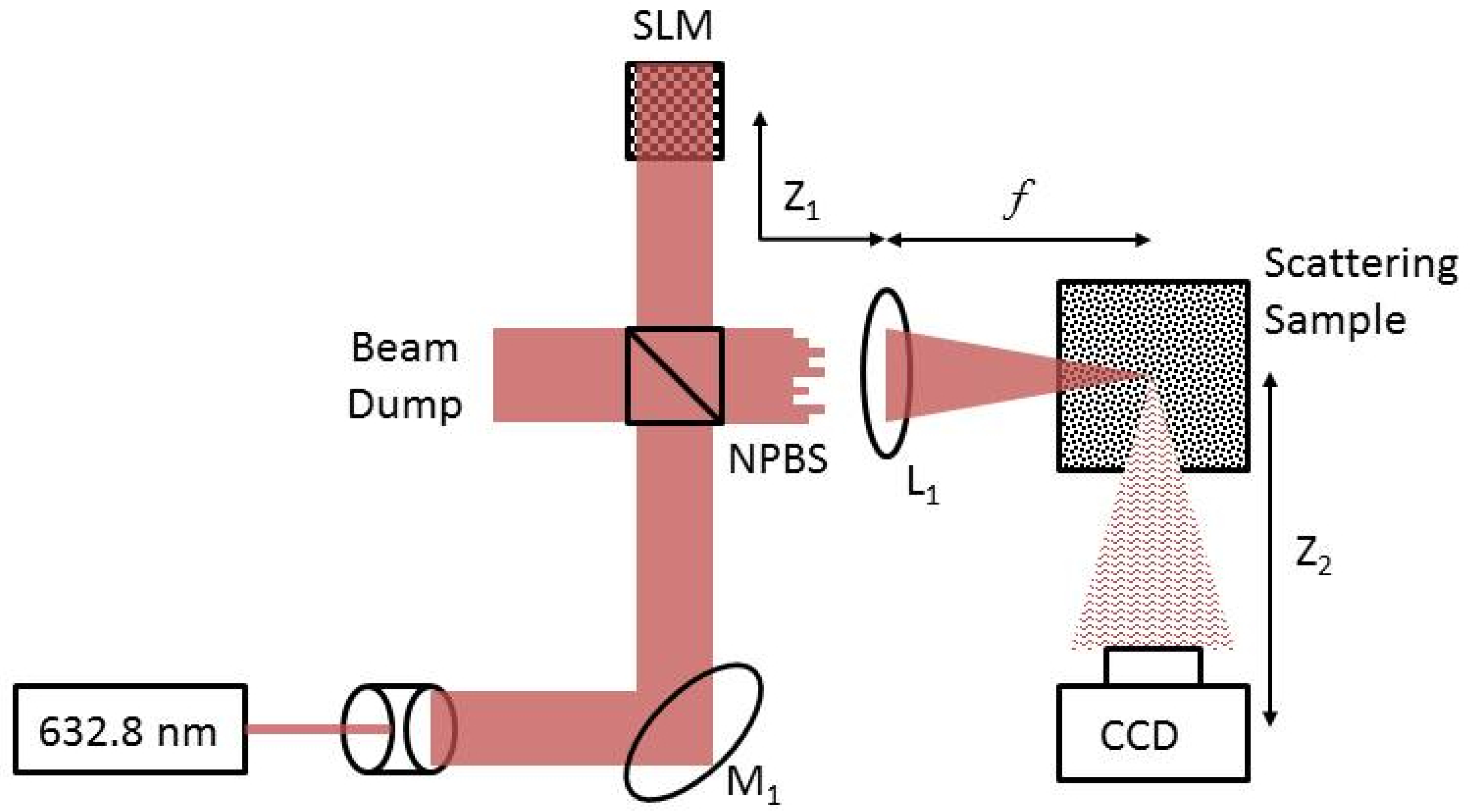
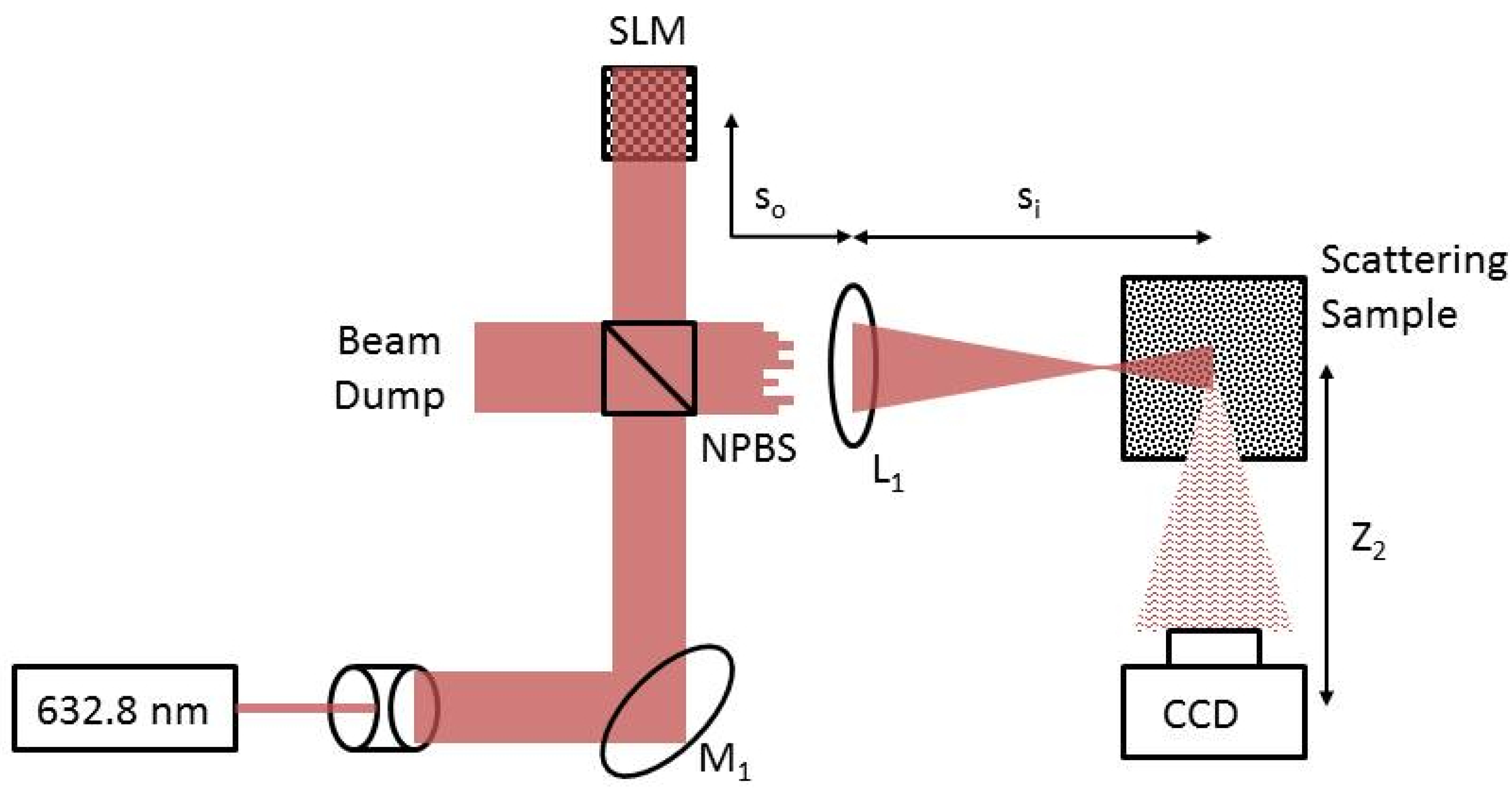
3.1. Laboratory Experiments
3.2. Simulations
3.3. Segment Size
4. Results and Analysis
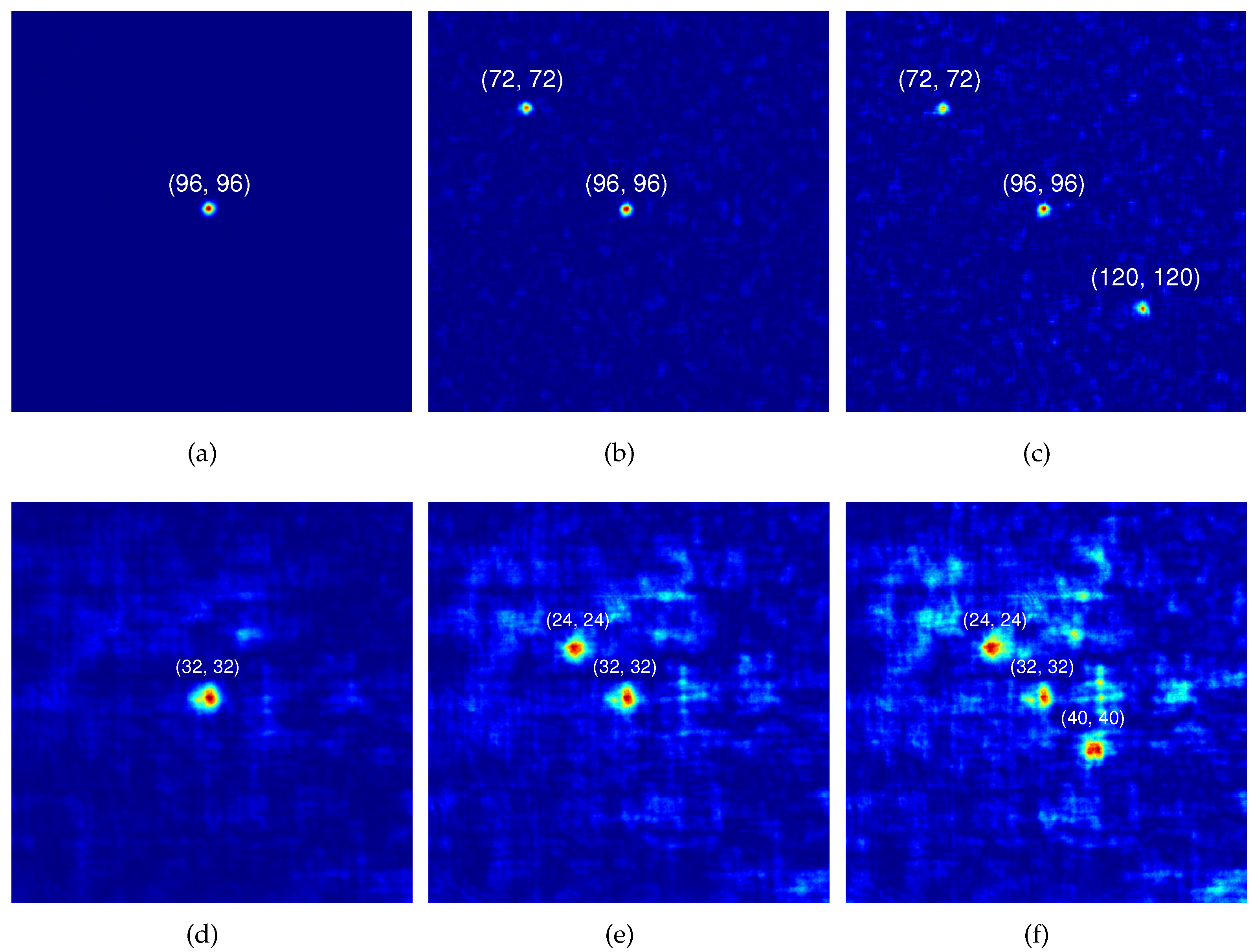
4.1. Experiments
4.2. Simulations
4.3. RM Properties
4.4. Predicted vs. Measured Enhancement
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| AFIT | Air Force Institute of Technology |
| DMD | digital mirror device |
| LCoS | liquid crystal on silicon |
| SLM | spatial light modulator |
| HeNe | helium-neon |
| CCD | charge-coupled device |
| NPBS | non-polarizing beam splitter |
| BNS | Boulder Nonlinear Systems |
| DFT | discrete Fourier transform |
| FFT | fast Fourier transform |
| TM | transmission matrix |
| RM | reflection matrix |
| DMD | digital micro-mirror device |
| SBIG | Santa Barbara Instruments Group |
| BRDF | Bidirectional Reflectance Distribution Function |
| FWHM | full width at half max |
| RMS | root mean square |
| SNR | signal-to-noise ratio |
| SF | spatial filter |
| NPBS | non-polarizing beam splitter |
| DDDAS | dynamic data driven applications systems |
References
- Freund, I. Looking through walls and around corners. Phys. A Stat. Mech. Appl. 1990, 168, 49–65. [Google Scholar] [CrossRef]
- Aulbach, J.; Gjonaj, B.; Johnson, P.M.; Mosk, A.P.; Lagendijk, A. Control of light transmission through opaque scattering media in space and time. Phy. Rev. Lett. 2011, 106, 103901. [Google Scholar] [CrossRef] [PubMed]
- Cui, M. A high speed wavefront determination method based on spatial frequency modulations for focusing light through random scattering media. Opt. Express 2011, 19, 2989–2995. [Google Scholar] [CrossRef] [PubMed]
- Vellekoop, I.; Mosk, A. Focusing of light by random scattering. arXiv, 2006; arXiv:cond-mat/0604253. [Google Scholar]
- Vellekoop, I.M.; Mosk, A. Focusing coherent light through opaque strongly scattering media. Opt. Lett. 2007, 32, 2309–2311. [Google Scholar] [CrossRef] [PubMed]
- Vellekoop, I.; Mosk, A. Phase control algorithms for focusing light through turbid media. Opt. Commun. 2008, 281, 3071–3080. [Google Scholar] [CrossRef]
- Burgi, K.; Ullom, J.; Marciniak, M.; Oxley, M. Reflective Inverse Diffusion. Appl. Sci. 2016, 6, 370. [Google Scholar] [CrossRef]
- Popoff, S.; Lerosey, G.; Carminati, R.; Fink, M.; Boccara, A.; Gigan, S. Measuring the transmission matrix in optics: An approach to the study and control of light propagation in disordered media. Phys. Rev. Lett. 2010, 104, 100601. [Google Scholar] [CrossRef] [PubMed]
- Popoff, S.; Lerosey, G.; Fink, M.; Boccara, A.C.; Gigan, S. Controlling light through optical disordered media: Transmission matrix approach. New J. Phys. 2011, 13, 123021. [Google Scholar] [CrossRef]
- Conkey, D.B.; Caravaca-Aguirre, A.M.; Piestun, R. High-speed scattering medium characterization with application to focusing light through turbid media. Opt. Express 2012, 20, 1733–1740. [Google Scholar] [CrossRef] [PubMed]
- Drémeau, A.; Liutkus, A.; Martina, D.; Katz, O.; Schülke, C.; Krzakala, F.; Gigan, S.; Daudet, L. Reference-less measurement of the transmission matrix of a highly scattering material using a DMD and phase retrieval techniques. Opt. Express 2015, 23, 11898–11911. [Google Scholar] [CrossRef] [PubMed]
- Yılmaz, H.; Vos, W.L.; Mosk, A.P. Optimal control of light propagation through multiple-scattering media in the presence of noise. Biomed. Opt. Express 2013, 4, 1759–1768. [Google Scholar] [CrossRef] [PubMed]
- Katz, O.; Small, E.; Silberberg, Y. Looking around corners and through thin turbid layers in real time with scattered incoherent light. Nat. Photonics 2012, 6, 549–553. [Google Scholar] [CrossRef]
- Sen, P.; Chen, B.; Garg, G.; Marschner, S.R.; Horowitz, M.; Levoy, M.; Lensch, H. Dual photography. ACM Trans. Gr. (TOG) 2005, 24, 745–755. [Google Scholar] [CrossRef]
- Goodman, J.W. Speckle Phenomena in Optics: Theory and Applications; Roberts and Company Publishers: Englewood, CO, USA, 2007. [Google Scholar]
- Williams, M.W. Depolarization and cross polarization in ellipsometry of rough surfaces. Appl. Opt. 1986, 25, 3616–3622. [Google Scholar] [CrossRef] [PubMed]
- Yoon, J.; Lee, K.; Park, J.; Park, Y. Measuring optical transmission matrices by wavefront shaping. Opt. Express 2015, 23, 10158–10167. [Google Scholar] [CrossRef] [PubMed]
- Rakić, A.D. Algorithm for the determination of intrinsic optical constants of metal films: Application to aluminum. Appl. Opt. 1995, 34, 4755–4767. [Google Scholar] [CrossRef] [PubMed]
- Smith, D.; Shiles, E.; Inokuti, M. The optical properties of metallic aluminum. Handb. Opt. Constants Solids 1985, 1, 369–406. [Google Scholar]
- Voelz, D.G. Computational Fourier Optics: A MATLAB Tutorial; Spie Press Bellingham: Bellingham, WA, USA, 2011. [Google Scholar]
- Goodman, J.W. Introduction to Fourier Optics; Roberts and Company Publishers: Englewood, CO, USA, 2005. [Google Scholar]
- Stover, J.C. Optical Scattering: Measurement and Analysis; SPIE Optical Engineering Press: Bellingham, WA, USA, 1995; Volume 2. [Google Scholar]
- Darema, F. Dynamic data driven applications systems: New capabilities for application simulations and measurements. In Computational Science–ICCS, Proceedings of International Conference on Computational Science, Atlanta, GA, USA, 22–25 May 2005; Springer: Berlin, Germany, 2005; pp. 610–615. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aluminum | Roughness | Correlation | Slope | Correlation | Focal-Plane | Image Plane | ||
|---|---|---|---|---|---|---|---|---|
| Samples | /m | /m | s | /m | ||||
| 100 Grit | 2.13 | 54.25 | 0.143 | 2.21 | 1.6 | 7.2 | 2.2 | 10.1 |
| 220 Grit | 1.67 | 35.25 | 0.141 | 2.24 | 1.5 | 5.8 | 3.1 | 13.3 |
| Bead Blasted | 1.04 | 30.25 | 0.105 | 3.00 | 2.2 | 8.5 | 6.1 | 22.5 |
| 320 Grit | 0.63 | 13.75 | 0.107 | 2.97 | 1.3 | 4.5 | 4.3 | 16.7 |
| 600 Grit | 0.45 | 16.00 | 0.066 | 4.79 | 1.3 | 6.0 | 5.4 | 24.2 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Burgi, K.; Marciniak, M.; Oxley, M.; Nauyoks, S. Measuring the Reflection Matrix of a Rough Surface. Appl. Sci. 2017, 7, 568. https://doi.org/10.3390/app7060568
Burgi K, Marciniak M, Oxley M, Nauyoks S. Measuring the Reflection Matrix of a Rough Surface. Applied Sciences. 2017; 7(6):568. https://doi.org/10.3390/app7060568
Chicago/Turabian StyleBurgi, Kenneth, Michael Marciniak, Mark Oxley, and Stephen Nauyoks. 2017. "Measuring the Reflection Matrix of a Rough Surface" Applied Sciences 7, no. 6: 568. https://doi.org/10.3390/app7060568
APA StyleBurgi, K., Marciniak, M., Oxley, M., & Nauyoks, S. (2017). Measuring the Reflection Matrix of a Rough Surface. Applied Sciences, 7(6), 568. https://doi.org/10.3390/app7060568