Optimal Control and Operation Strategy for Wind Turbines Contributing to Grid Primary Frequency Regulation

Abstract
:1. Introduction
2. System Modeling and Converter Control
2.1. Wind Turbines and Modeling PMSG
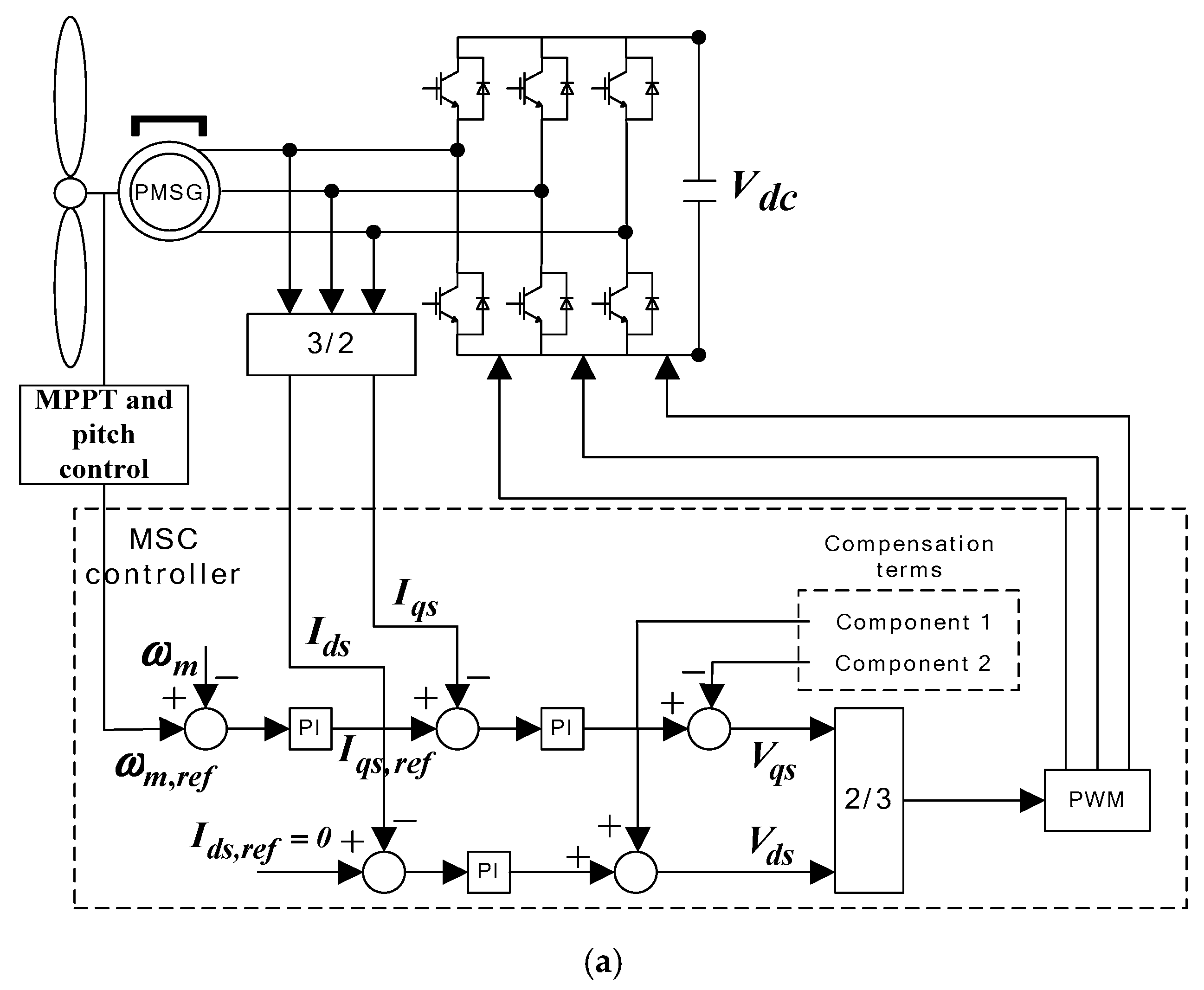
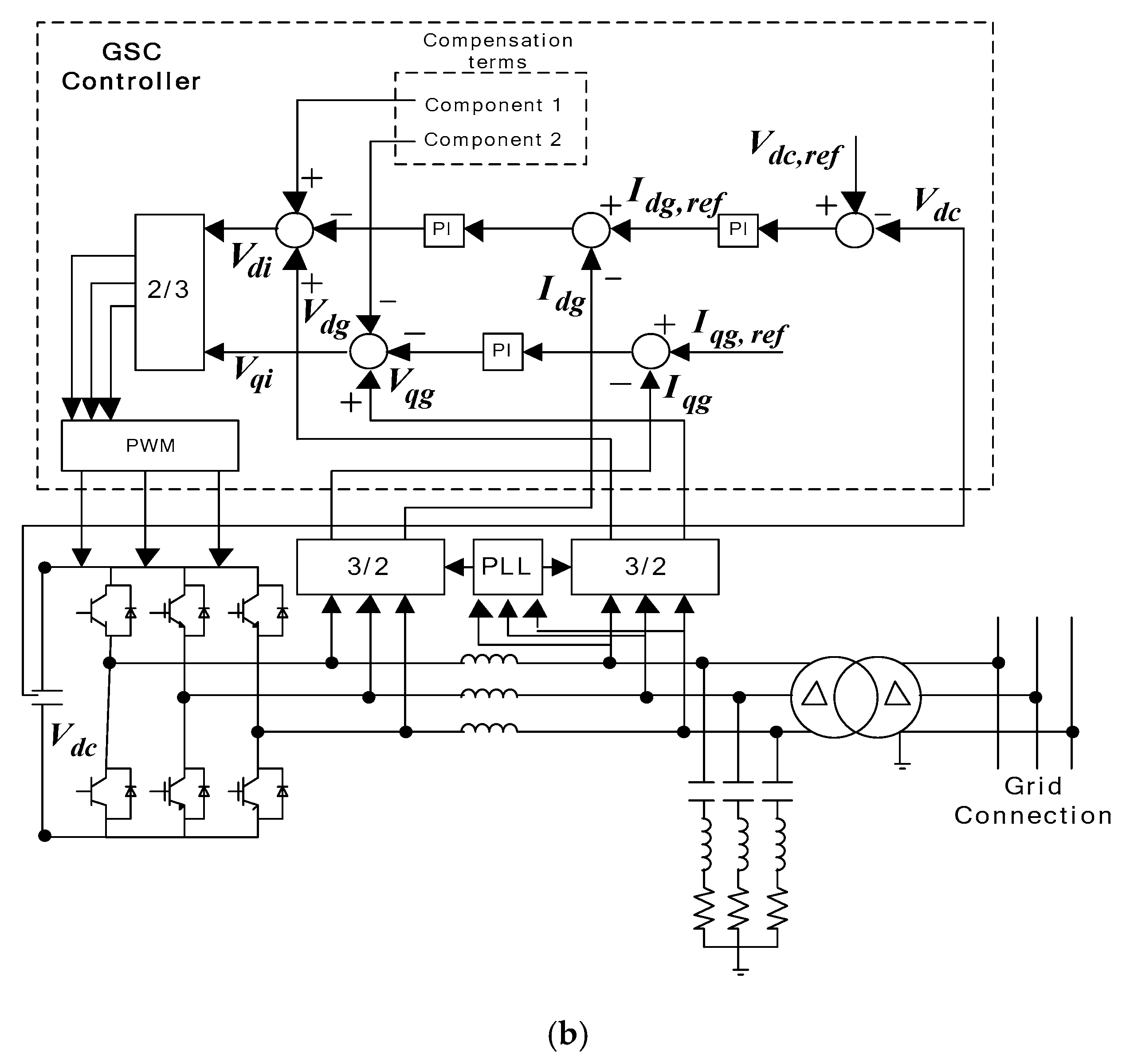
2.2. MSC and GSC Control
3. Proposed Optimal Strategy
3.1. Control Mode of Wind Turbine
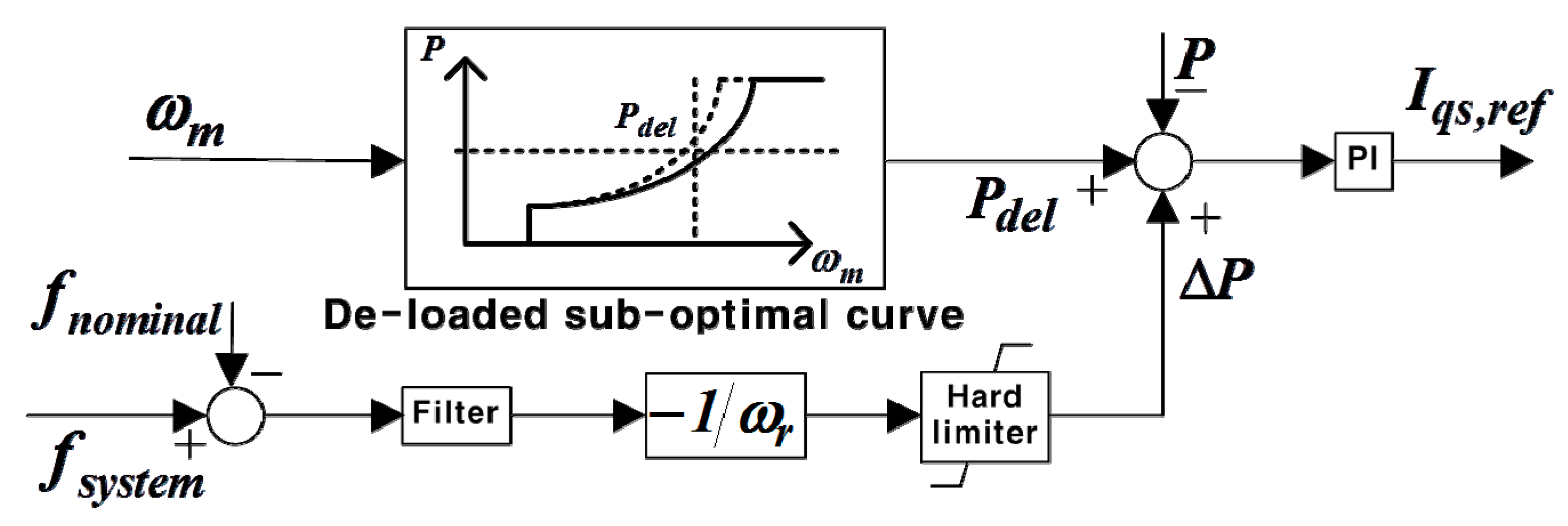
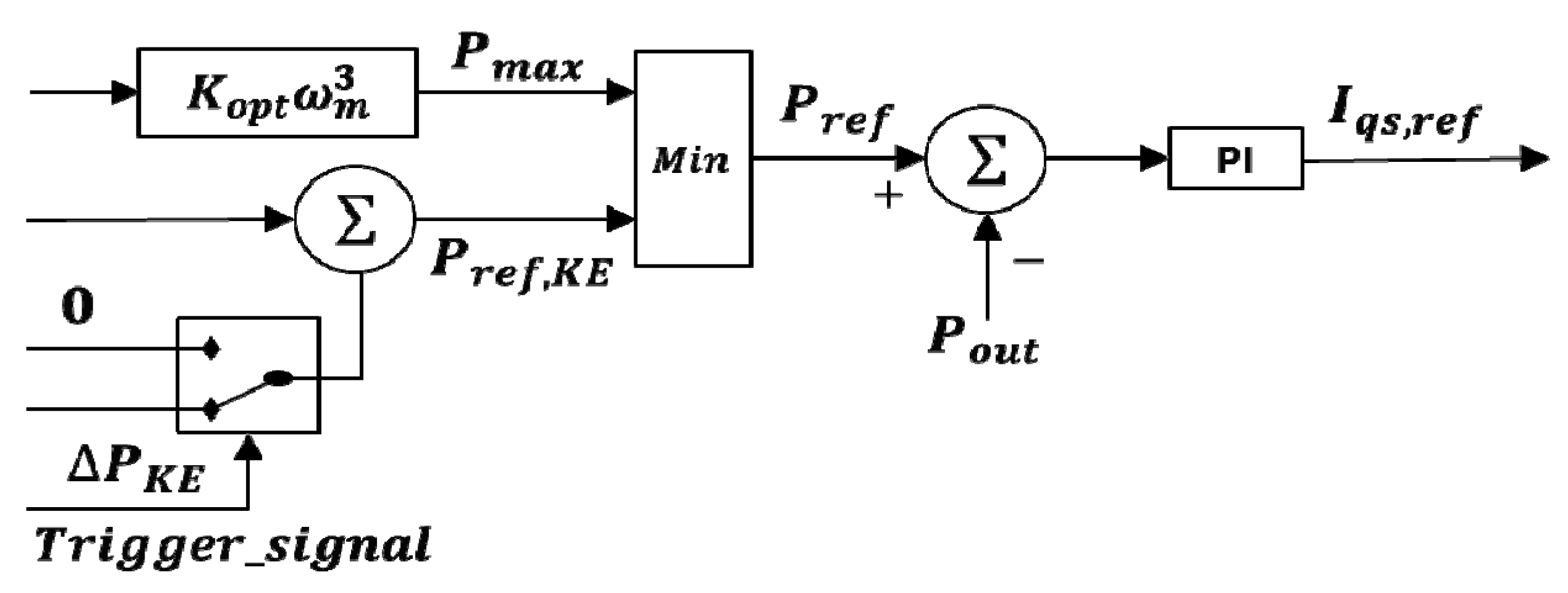
3.1.1. Active Power Control
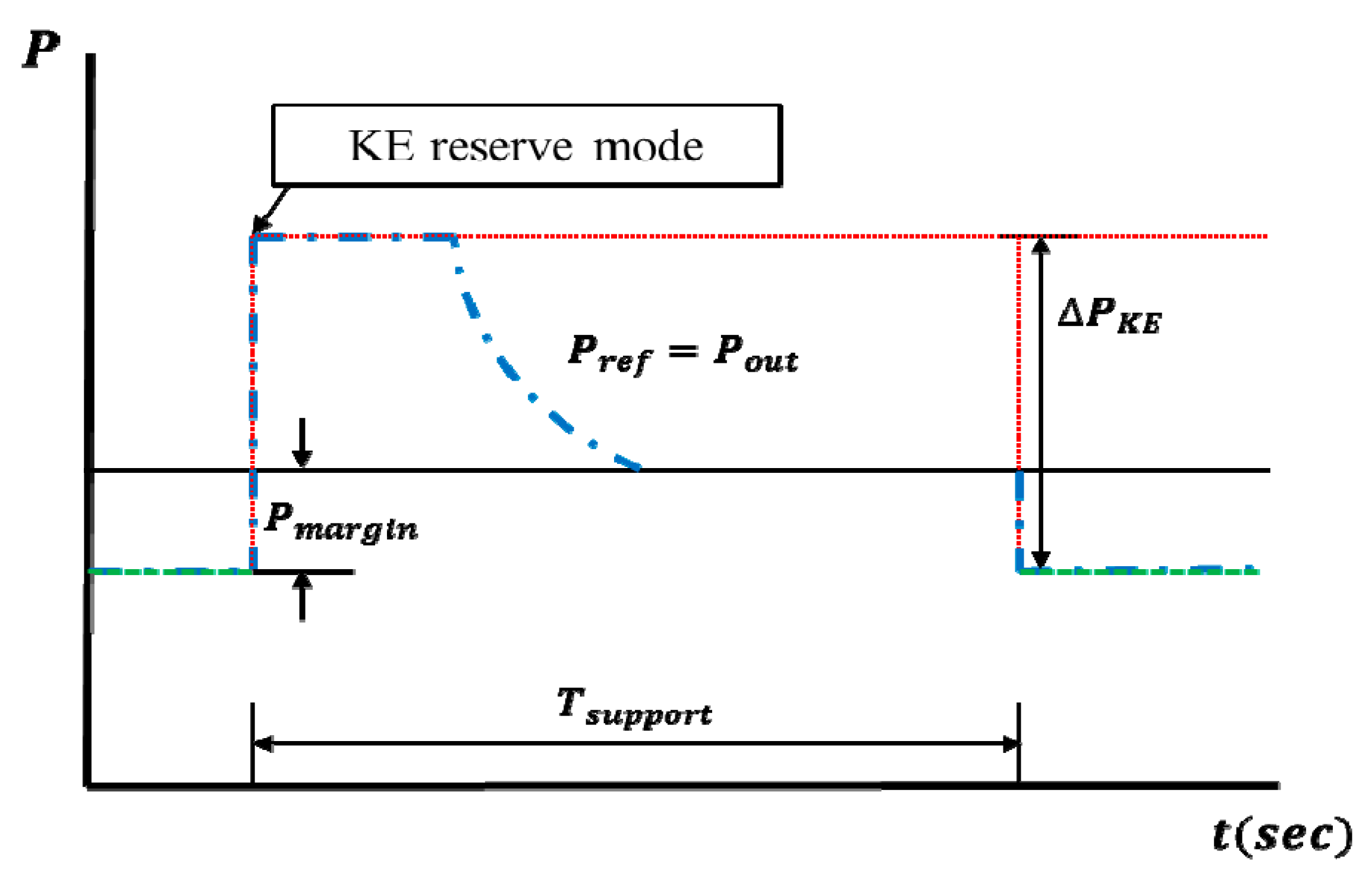
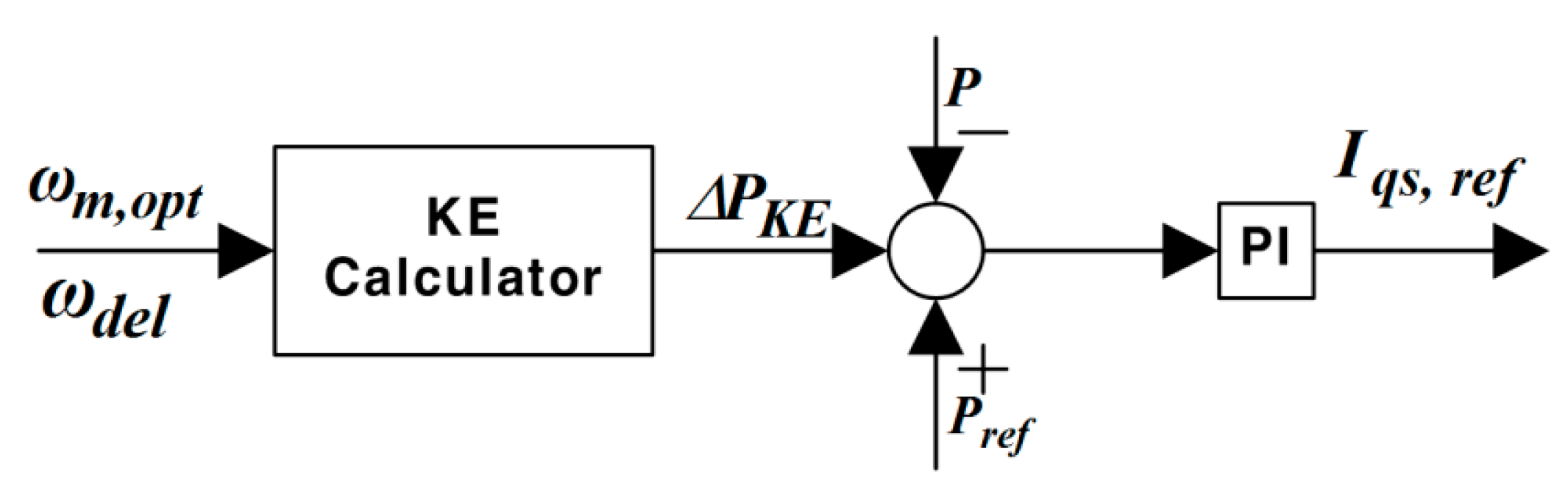
3.1.2. KE Reserve Control
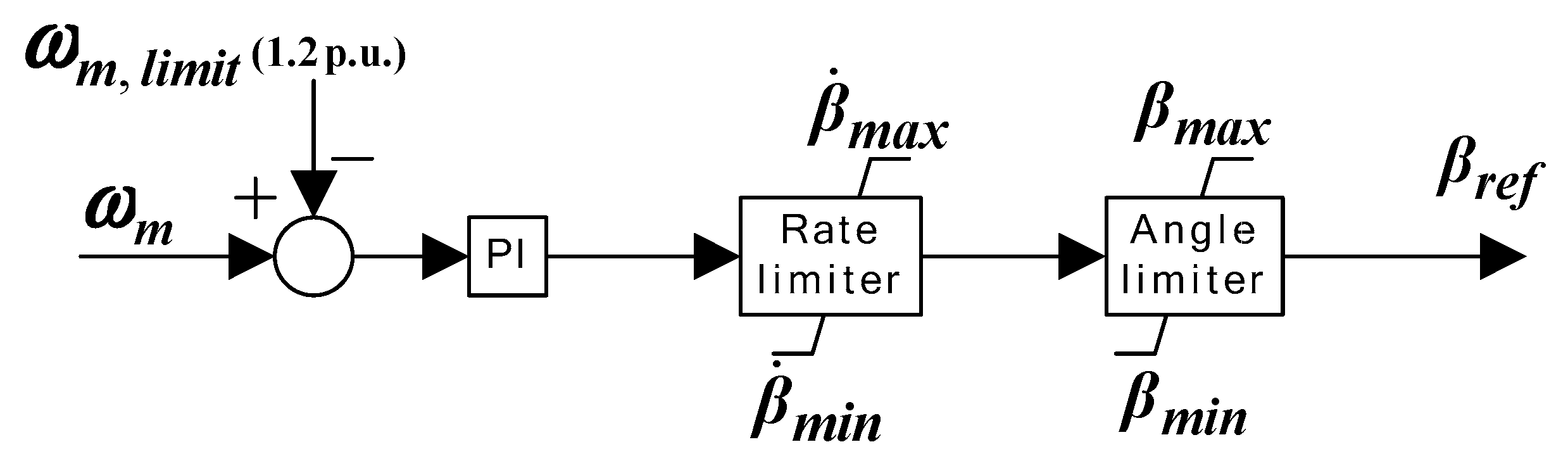
3.1.3. Pitch Angle Control
- Optimization of the power output of the wind turbine
- Prevention of excessive rotational speed and mechanical power above the rated wind.
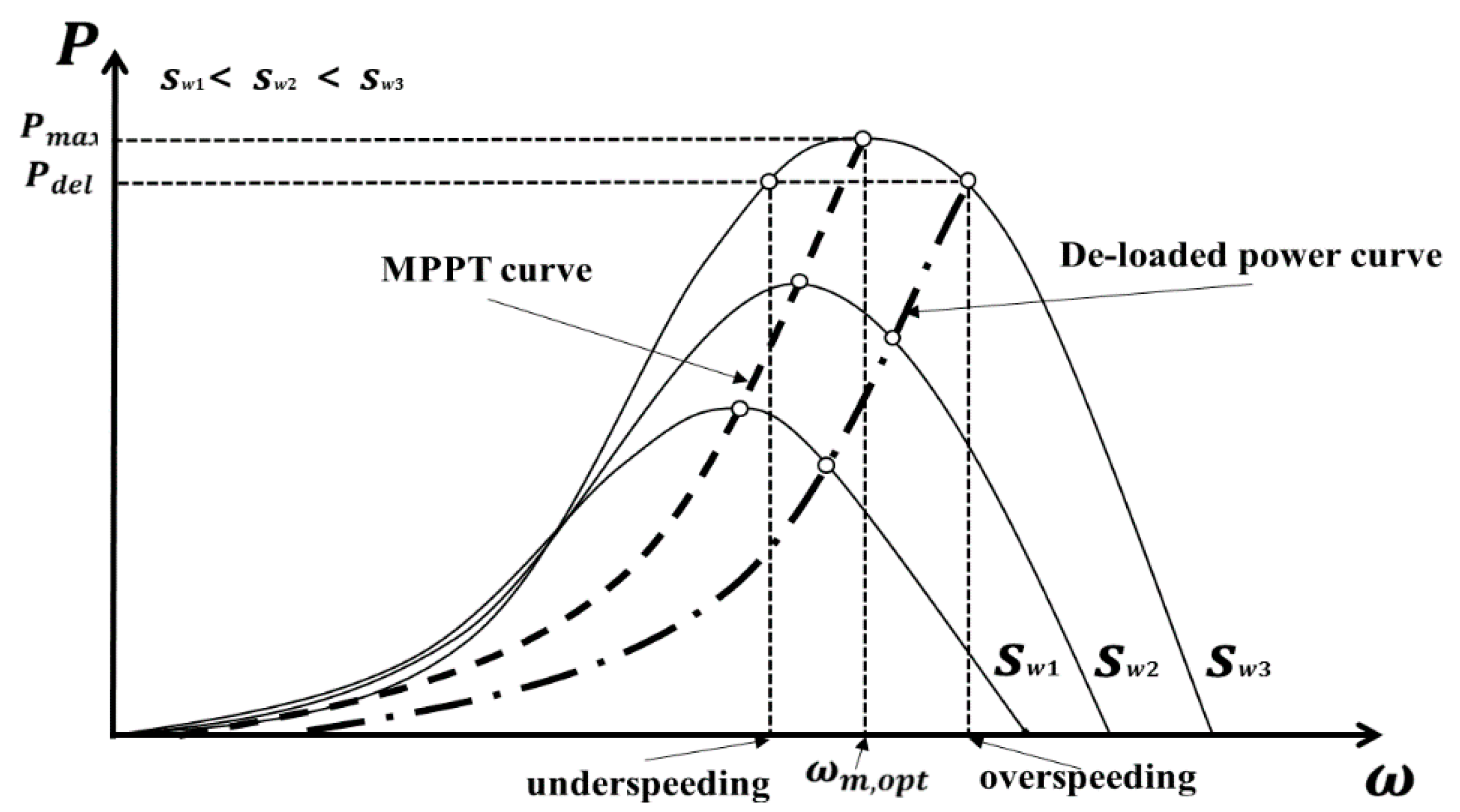
3.2. KE Optimization Method
3.2.1. Operation Scheme
3.2.2. Optimal KE Solution
3.2.3. PSO Algorithm
3.3. Procedure of Optimization Strategy
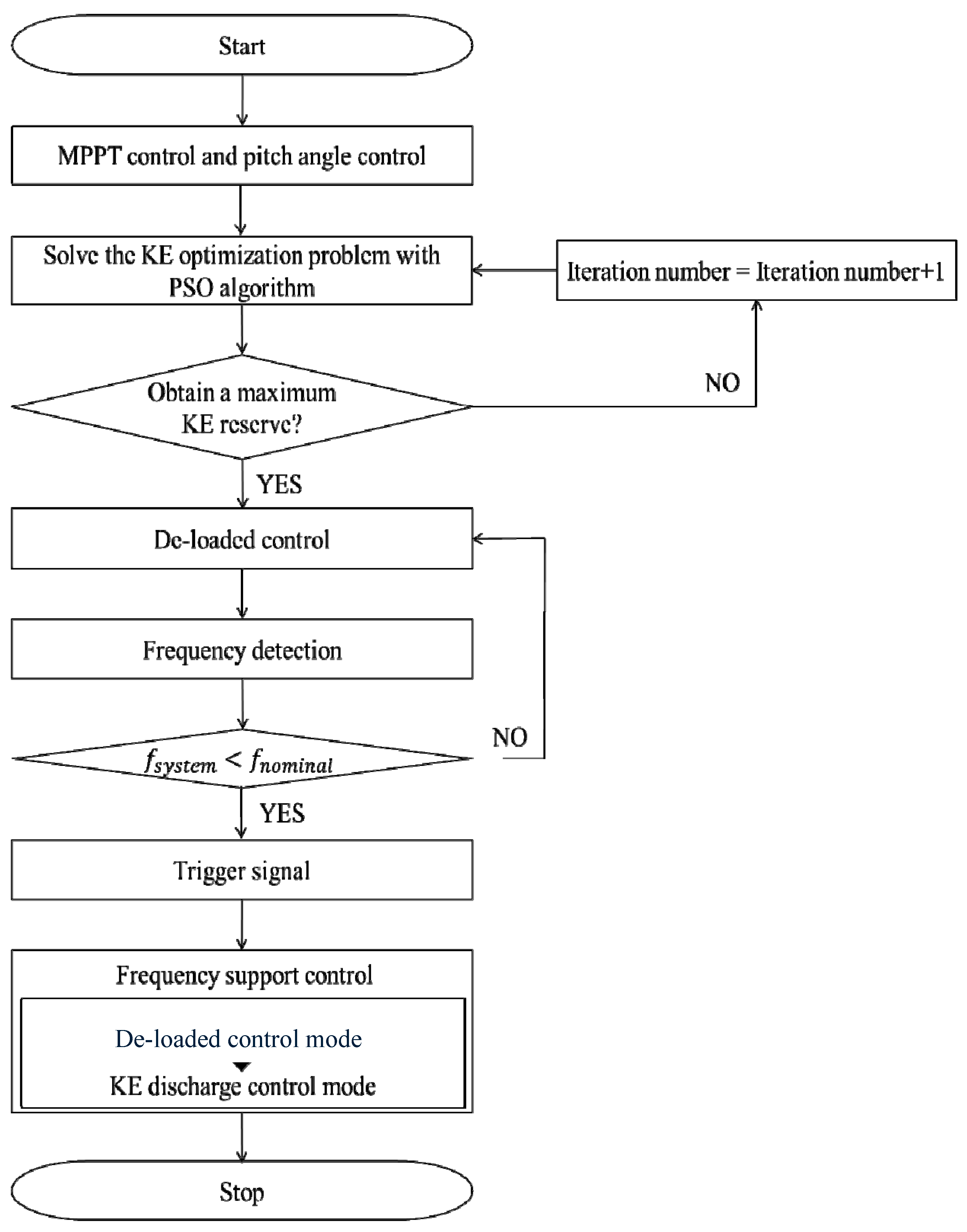
- Obtain the maximum power using the MPPT and pitch angle control based on the converter control.
- Optimize the KE reserve to improve the frequency support capability of the PMSG wind turbine. The KE optimization problem is solved using the PSO algorithm, which maximizes the sum of the KE reserves to determine the de-loaded control power reference for each wind farm. If the number of iterations is maximized, the optimal decision value is used to maximize the KE reserve.
- Operate at the de-loaded power point to maintain a certain power margin and ensure an additional KE reserve. The regulation margin is available to support the system frequency in a transient duration.
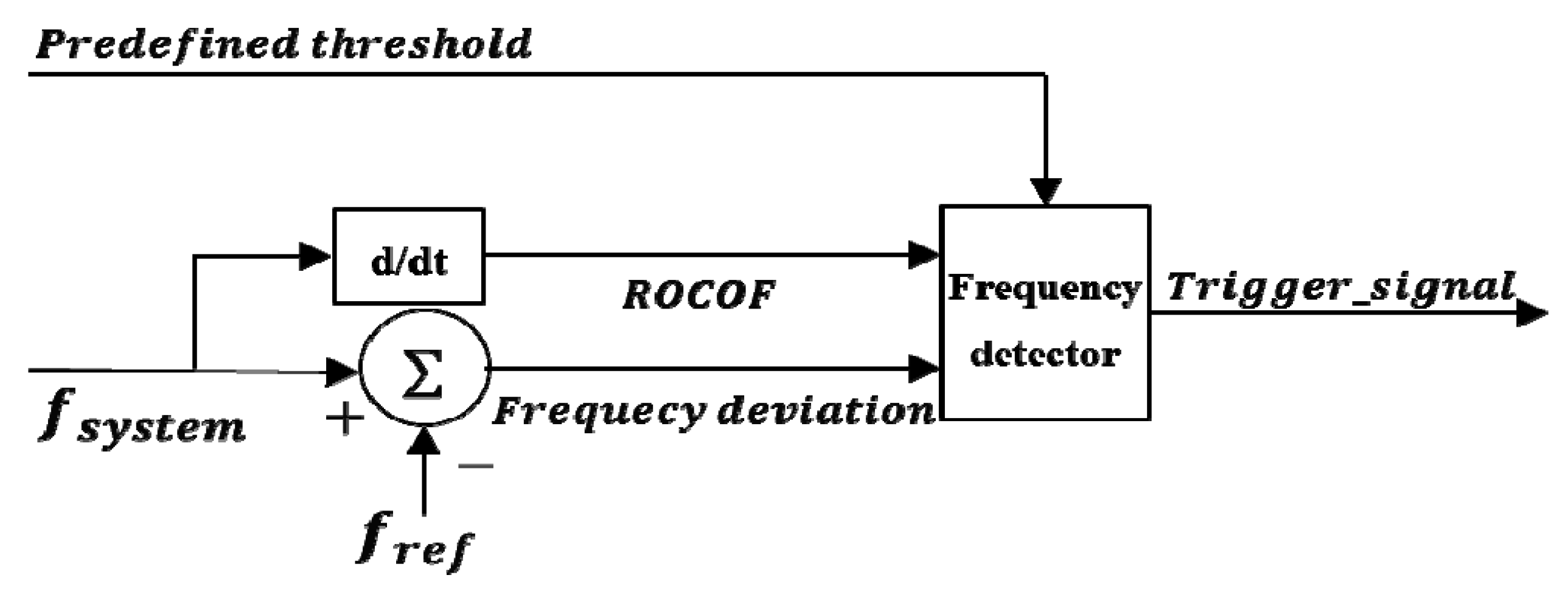
- Check the change in the system frequency caused by the loss of generators and disturbance. In addition, monitor the frequency deviation of the power system. If the frequency deviation problem (low frequency) occurs in the power system, then go to Step 5. Otherwise, if the measured frequency is higher than the nominal frequency, the system operator provides a new command to the de-loaded control and reduces the output of the conventional generators. When the power system is stable, return to Step 3.
- In the event of a frequency disturbance, switch the control of the trigger signal from the de-loaded control to the KE discharge control. The frequency regulation control utilizes the additional reserves due to the KE stored in the PMSG wind turbine and rotor.
- If the operation in the power system is stabilized from the compensation, end the procedure.
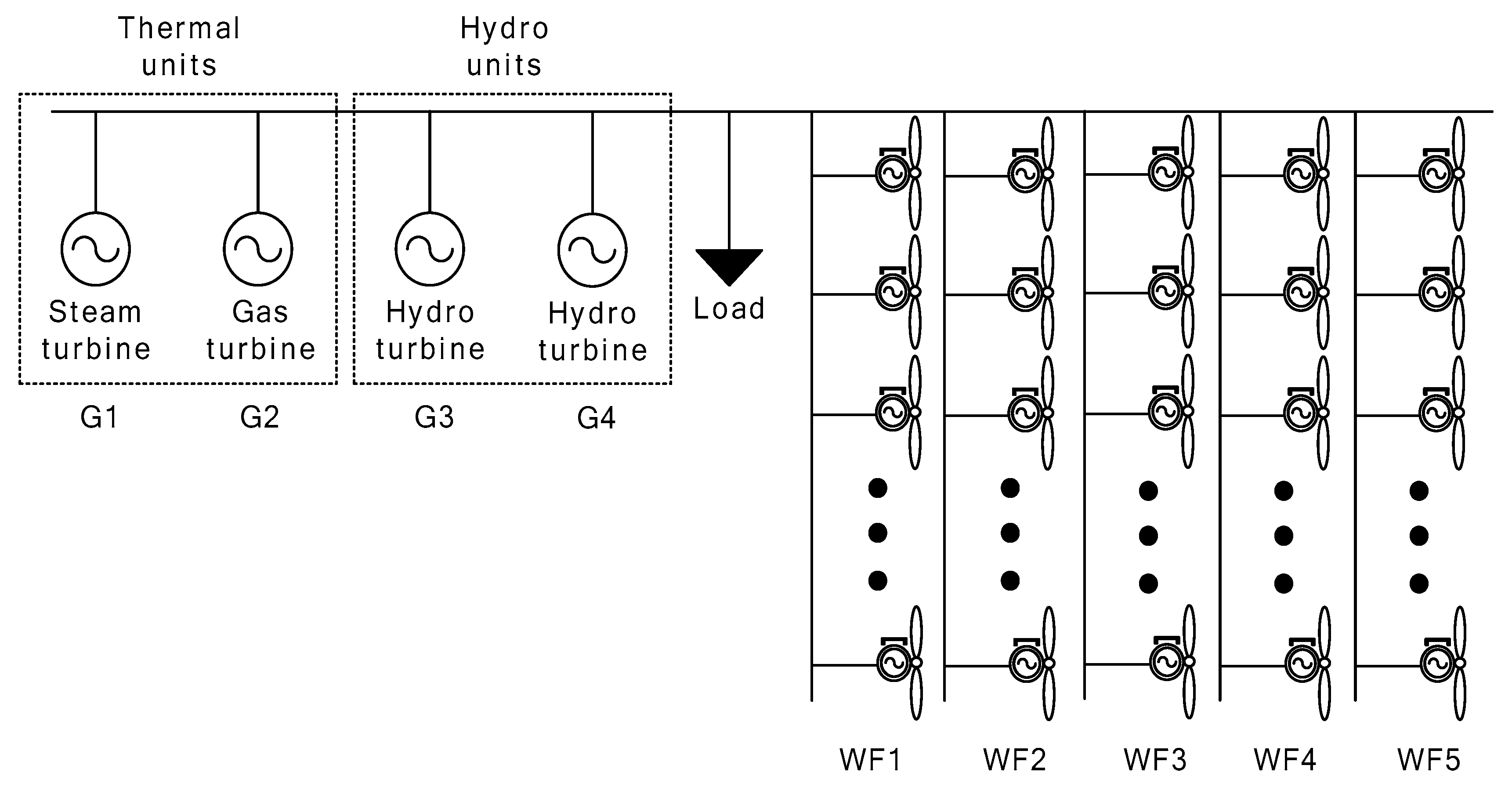
4. Case Study
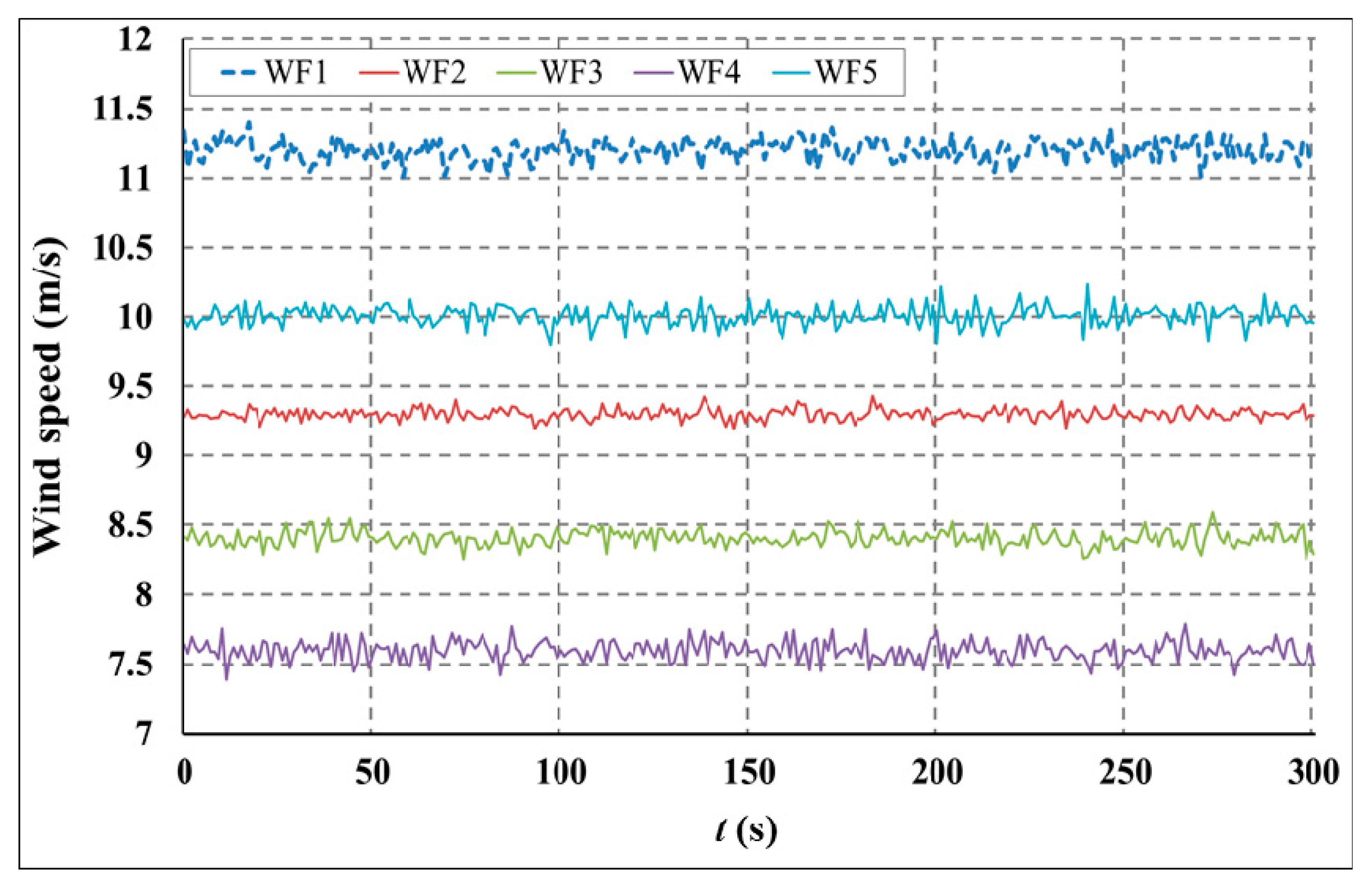
4.1. Data and Parameter Setting
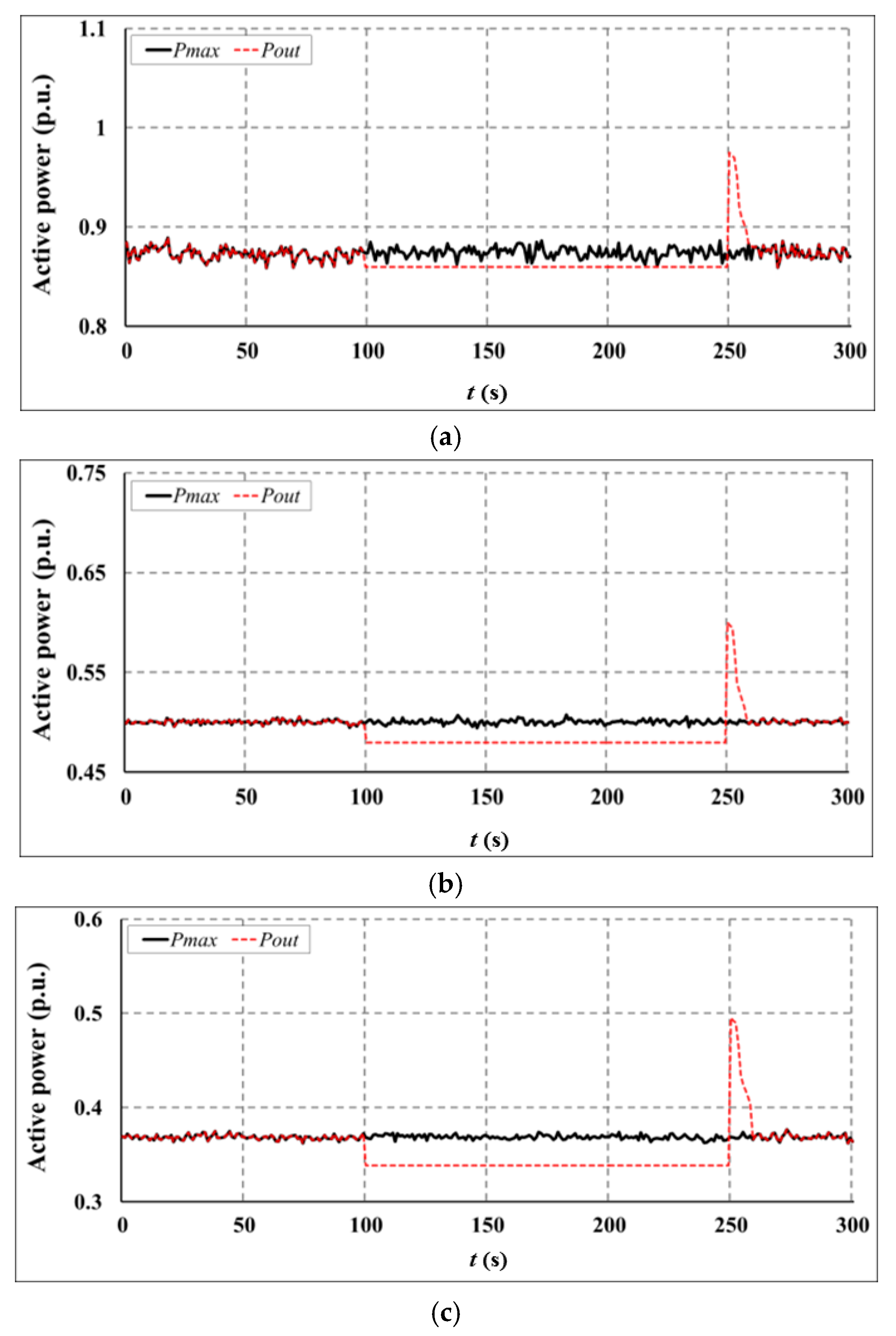
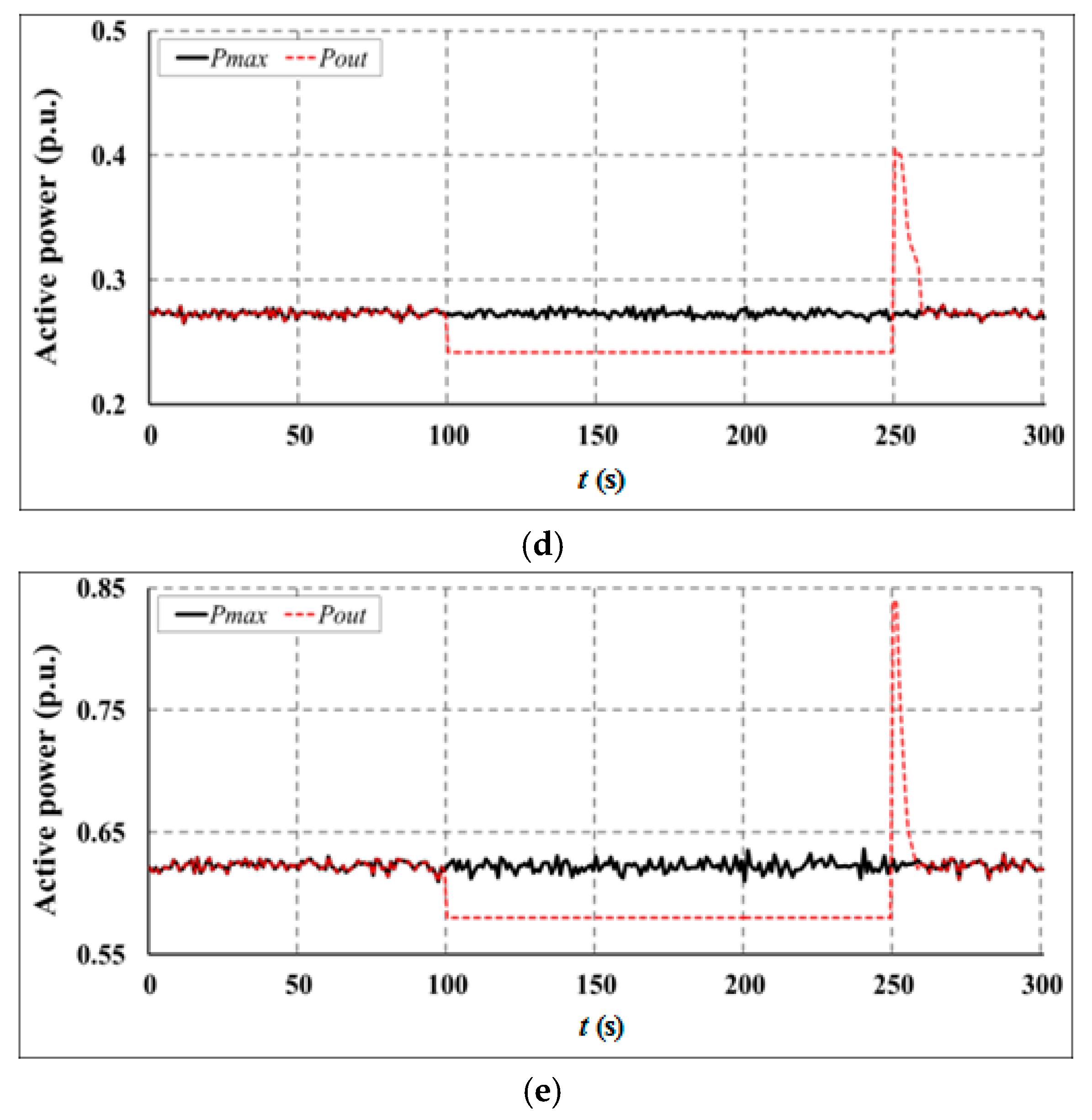
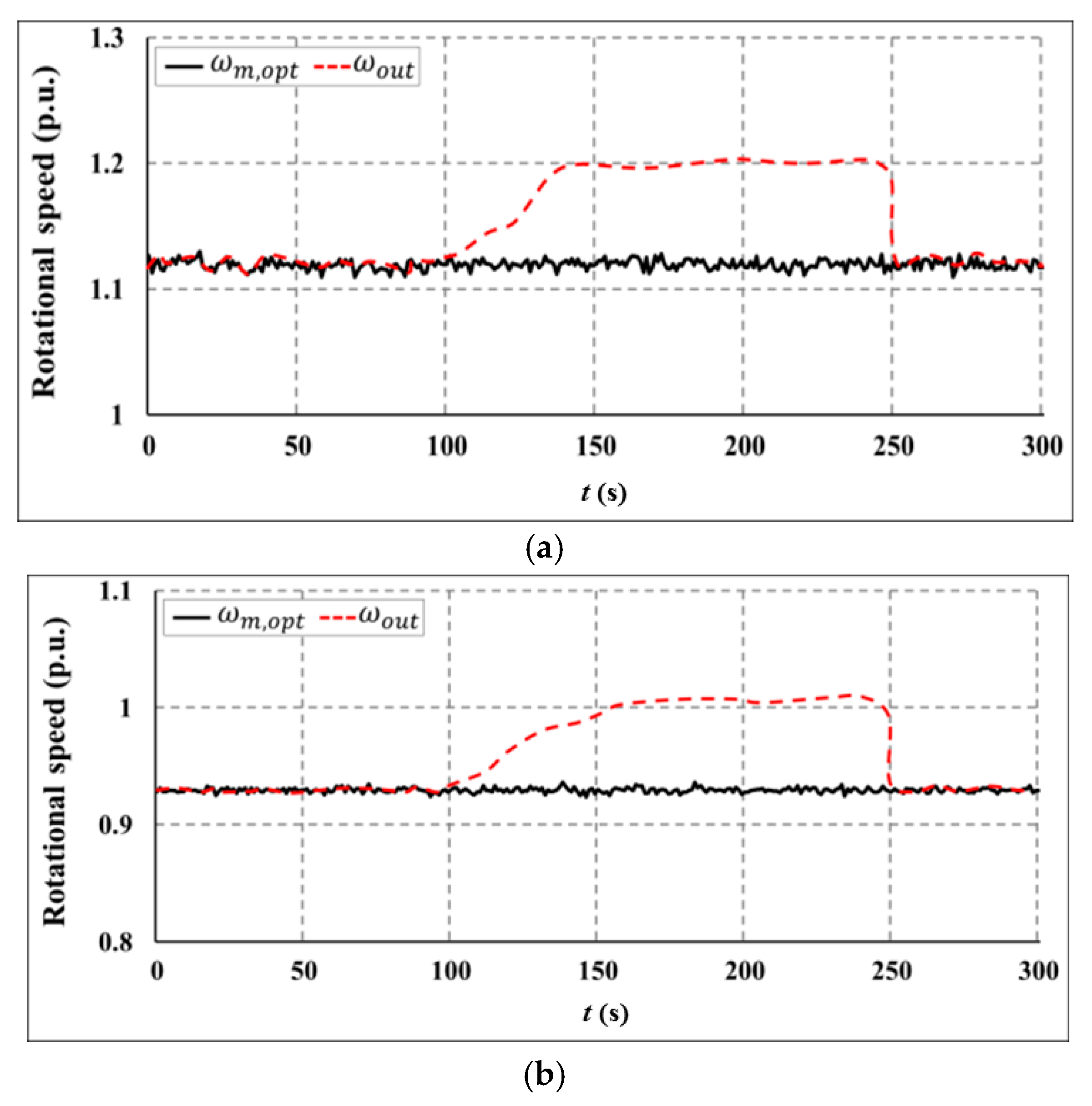
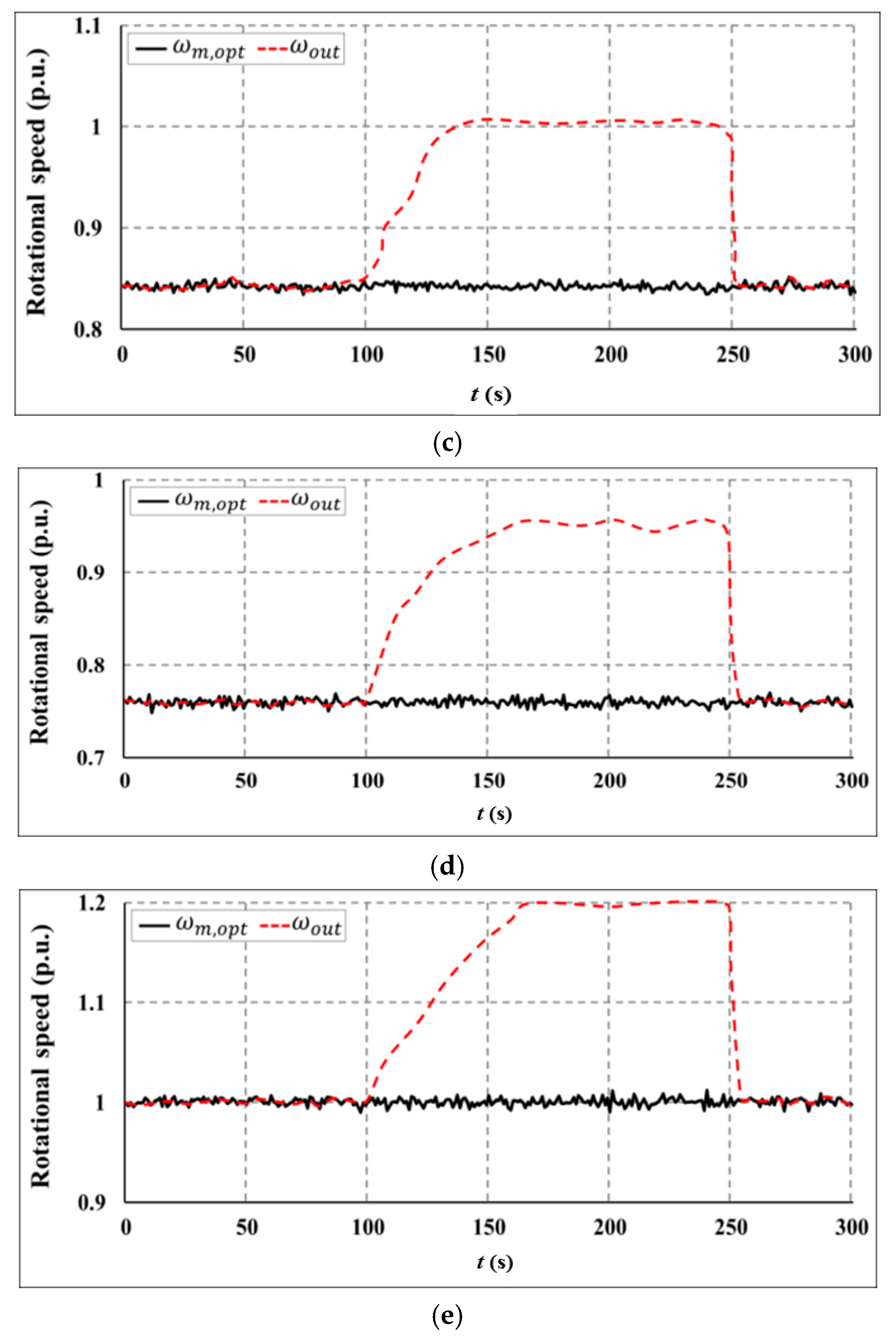
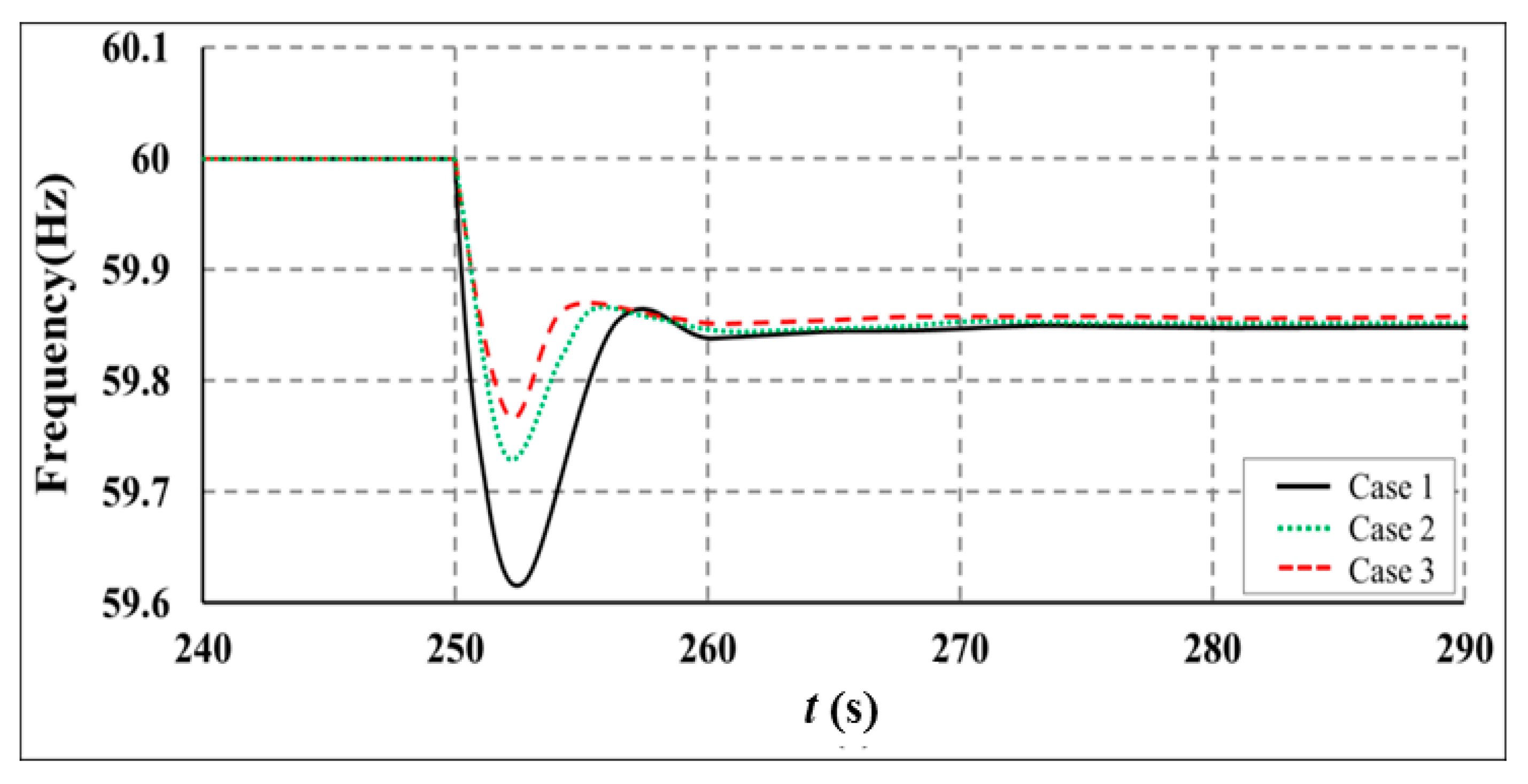
4.2. Simulation Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| Blade pitch angle | |
| Reference value of pitch angle | |
| βmax, βmin | Maximum and minimum values of pitch angle |
| Air density (=1.205 kg/m2) | |
| Tip speed ratio | |
| Optimal tip speed ratio | |
| B | Friction coefficient of generator |
| Cp | Power coefficient of wind turbine |
| Cp,opt | Optimal power coefficient of wind turbine |
| Sw | Wind speed |
| J | Moment of inertia of wind turbine (kg/m2) |
| Vdc | DC link voltage |
| Vdc,ref | Reference value of DC link voltage |
| Vdi, Vqi | Inverter voltages in d–q axis |
| Vds, Vqs | Stator voltages in d–q axis |
| Vdg, Vqg | Grid-side voltages in d–q axis |
| Ids, Iqs | Stator currents in d–q axis |
| Ids,ref, Iqs,ref | Reference value of stator currents in d–q axis |
| Idg, Iqg | Grid-side currents in d–q axis |
| Idg,ref, Iqg,ref | Reference values of grid-side currents in d–q axis |
| θr | Electrical angle between a-axis and q-axis (rad) |
| u | Any of the variable (voltage, current, and flux linkage) to be transformed from the abc frame to dq frame |
| Rs, Rg | Resistances of PMSG winding and grid sides |
| Te | Electromagnetic torque |
| Tm | Mechanical torque |
| Magnetic flux | |
| C | Capacitance of DC link capacitor |
| Ld, Lq | Machine inductances in d–q axis |
| Ls, Lg | Inductances of PMSG winding and grid sides |
| pn | Number of pole pairs |
| ωdel | Reference value of rotational speed of de-loaded control |
| ωe | Electrical rotational speed |
| ωg | Rotational speed of grid side |
| ωm | Mechanical rotational speed |
| ωm,limit | Maximum limited rotational speed |
| ωm,opt | Optimal rotational speed |
| ωm,ref | Reference value of mechanical rotational speed |
| ωout | Rotational speed output |
| ωt | Rotational speed of turbine |
| R | Rotator radius |
| Pm | Mechanical power |
| Pt, Pg | Active powers of wind turbine and grid side |
| Pmax, Pmin | Maximum and minimum possible powers |
| Pmargin | Power margin |
| Pout | Active power output |
| Pref | Reference value of active power |
| Pdel | De-loaded power reference |
| Pref,KE | Reference value of KE power |
| Pref,wf | Reference value of active power of wind farm |
| N | Number of PMSGs in wind farm |
| Δ PKE | KE power increment |
| Δ Ploss | Lacking active power under grid fault |
| Qg | Reactive power of grid side |
| Qref | Reference value of reactive power |
| Kdel | Rotational speed coefficient of de-loaded control |
| Kopt | Coefficient of rotational speed for maximum power |
| KEres | Kinetic energy (KE) reserve |
| KEres,wf | Total KE reserve of wind farm |
| Hsystem | Equivalent inertia of entire power system |
| fsystem | Frequency of power system |
| fnominal | Nominal frequency (60 Hz) |
| fref | Reference value of frequency |
| Velocity along dth dimension of ith particle in iteration t | |
| Current position along dth dimension of ith particle in iteration t | |
| pbest, gbest | Best positions for individual and swarm particles |
| r1, r2 | Random numbers between 0 and 1 |
| c1, c2 | Acceleration coefficients |
| c1,max, c1,min | Maximum and minimum value of the c1 |
| c2,max, c2,min | Maximum and minimum value of the c2 |
| w | Inertial weight |
| wmax, wmin | Maximum and minimum value of the inertial weight |
| t | Current iteration |
| tmax | Maximum number of iterations |
Appendix A. Simulation Parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Notation | Value |
|---|---|---|
| Blade radius | R | 38 m |
| Air density | ρ | 1.205 kg/m2 |
| Optimal power coefficient | Cp,opt | 0.4412 |
| Rated wind speed | Sw,rated | 12 m/s |
| Parameters | Notation | Value |
|---|---|---|
| Rated generator power | Pm,rated | 2 MW |
| Rated RMS line-to-line voltage | Vm,rated ρ | 0.69 kV |
| Rated machine speed | ωm,rated | 376.99 rad/s |
| Pole pairs | P | 11 |
| Generator and turbine inertia constant | H | 5.7267 s |
| PM flux | Ψf | 136 Wb |
| Stator d-axis inductance | Lmd | 0.334 H |
| Stator q-axis inductance | Lmq | 0.217 H |
| Stator leakage inductance | Lsi | 0.0334 H |
| Stator resistance | Rs | 0.08 Ω |
| Notation | Value | Notation | Value |
|---|---|---|---|
| H | 5.4 s | Xl | 0.161 p.u. |
| Xd | 1.456 p.u. | Xq | 1.405 p.u. |
| Xd′ | 0.206 p.u. | Xq′ | 0.500 p.u. |
| Xd″ | 0.147 p.u. | Xq″ | 0.147 p.u. |
| 3.735 s | 0.305 s | ||
| 0.032 s | 0.080 s |
| Notation | Value | Notation | Value |
|---|---|---|---|
| H | 1.86 s | Xl | 0.15 p.u. |
| Xd | 1.94 p.u. | Xq | 1.92 p.u. |
| Xd′ | 0.2259 p.u. | Xq′ | 0.402 p.u. |
| Xd″ | 0.1723 p.u. | Xq″ | 0.1723 p.u. |
| 10.4 s | 0.83 s | ||
| 0.03 s | 0.055 s |
| Notation | Value | Notation | Value |
|---|---|---|---|
| H | 2 s | Xl | 0.12 p.u. |
| Xd | 2.102 p.u. | Xq | 1.95 p.u. |
| Xd′ | 0.246 p.u. | Xq′ | 0.502 p.u. |
| Xd″ | 0.16 p.u. | Xq″ | 0.263 p.u. |
| 11.2 s | 0.93 s | ||
| 0.034 s | 0.07 s |
| Controller | kp | ki |
|---|---|---|
| MSC | 0.29 | 12.48 |
| GSC | 0.71 | 7.23 |
| DC-link | 0.002 | 0.05 |
| Pitch angle | 150 | 25 |
| De-loaded | 2.12 | 0.21 |
References
- Rodrigo, T.P.; Sílvio, F.R.; Edwin, W.; Ricardo, S.; Pavol, B.; Jan, P. Operation and Power Flow Control of Multi-Terminal DC Networks for Grid Integration of Offshore Wind Farms Using Genetic Algorithms. Energies 2013, 6, 1–26. [Google Scholar]
- Alexander, K.; Bruno, U.S.; Lueder, V.B. Curtailment in a Highly Renewable Power System and Its Effect on Capacity Factors. Energies 2016, 9, 510. [Google Scholar] [CrossRef]
- Mohamed, A.; Ralph, K. Fault-Ride through Strategy for Permanent-Magnet Synchronous Generators in Variable-Speed Wind Turbines. Energies 2016, 9, 1066. [Google Scholar] [CrossRef]
- Hong, C.M.; Chen, C.H.; Tu, C.S. Maximum power point tracking-based control algorithm for PMSG wind generation system without mechanical sensors. Energy Convers. Manag. 2013, 69, 58–67. [Google Scholar] [CrossRef]
- Xiaolian, Z.; Can, H.; Sipeng, H.; Fan, C.; Jingjing, Z. An Improved Adaptive-Torque-Gain MPPT Control for Direct-Driven PMSG Wind Turbines Considering Wind Farm Turbulences. Energies 2016, 9, 977. [Google Scholar] [CrossRef]
- Doherty, R.; Mullane, A.; Nolan, G.; Burke, D.J.; Bryson, A.; Malley, M.O. An assessment of the impact of wind generation on system frequency control. IEEE Trans. Power Syst. 2010, 25, 452–460. [Google Scholar] [CrossRef]
- Ekanayae, J.; Holdsworth, L.; Jenkins, N. Control of DFIG wind turbines. Power Eng. 2003, 17, 28–32. [Google Scholar] [CrossRef]
- Wu, Z.; Gao, W.; Wang, X.; Kang, M.; Hwang, M.; Kang, Y.C. Improved inertial control for permanent magnet synchronous generator wind turbine generators. IET Renew Power Gener. 2016, 10, 1366–1373. [Google Scholar] [CrossRef]
- Li, Y.; Xu, Z.; Wong, K.P. Advanced control strategies of PMSG-based wind turbines for system inertia support. IEEE Trans. Power Syst. 2017, 32, 3027–3037. [Google Scholar] [CrossRef]
- Lalor, G.; Mullane, A.; O’Malley, M. Frequency control and wind turbine technologies. IEEE Trans. Power Syst. 2005, 20, 1905–1913. [Google Scholar] [CrossRef]
- Morren, J.; de Haan, S.W.H.; Kling, W.L.; Ferreira, J.A. Wind turbines emulating inertia and supporting primary frequency control. IEEE Trans. Power Syst. 2006, 21, 433–434. [Google Scholar] [CrossRef]
- Holdsworth, L.; Ekanayake, J.B.; Jenkins, N. Power system frequency response from fixed speed and doubly fed induction generator based wind turbines. Wind Energy 2004, 7, 21–35. [Google Scholar] [CrossRef]
- De Almeida, R.G.; Lopes, J.A.P. Participation of doubly fed induction wind generators in system frequency regulation. IEEE Trans. Power Syst. 2007, 22, 944–950. [Google Scholar] [CrossRef]
- Ramtharan, G.; Ekanayake, J.; Jenkins, N. Frequency support from doubly fed induction generator wind turbines. IET Renew. Power Gener. 2007, 1, 3–9. [Google Scholar] [CrossRef]
- Wilches-Bernal, F.; Chow, J.H.; Sanchez-Gasca, J.J. A fundamental study of applying wind turbines for power system frequency control. IEEE Trans. Power Syst. 2016, 31, 1495–1505. [Google Scholar] [CrossRef]
- Pradhan, C.; Bhende, C.N. Adaptive deloading of stand-alone wind farm for primary frequency control. Energy Syst. 2015, 6, 109–127. [Google Scholar] [CrossRef]
- De Almeida, R.G.; Castronuovo, E.D.; Lopes, J.P. Optimum generation control in wind parks when carrying out system operator requests. IEEE Trans. Power Syst. 2016, 21, 718–725. [Google Scholar] [CrossRef]
- Vidyanandan, K.V.; Senroy, N. Primary frequency regulation by deloaded wind turbines using variable droop. IEEE Trans. Power Syst. 2013, 28, 837–846. [Google Scholar] [CrossRef]
- Xue, Y.; Tai, N. Review of contribution to frequency control through variable speed wind turbine. Renew. Energy 2011, 36, 1671–1677. [Google Scholar]
- Diaz-Gonzalez, F.; Hau, M.; Sumper, A.; Gomis-Bellmunt, O. Participation of wind power plants in system frequency control: Review of grid code requirements and control methods. Renew. Sustain. Energy Rev. 2014, 34, 551–564. [Google Scholar] [CrossRef]
- Keung, P.K.; Li, P.; Banakar, H.; Ooi, B.T. Kinetic energy of wind-turbine generators for system frequency support. IEEE Trans. Power Syst. 2009, 24, 279–287. [Google Scholar] [CrossRef]
- Kayikci, M.; Milanovic, J.V. Dynamic contribution of DFIG-based wind plants to system frequency disturbances. IEEE Trans. Power Syst. 2009, 24, 859–867. [Google Scholar] [CrossRef]
- Hafiz, F.; Abdennour, A. Optimal use of kinetic energy for the inertial support from variable speed wind turbines. Renew. Energy 2015, 80, 629–643. [Google Scholar] [CrossRef]
- Zertek, A.; Verbic, G.; Pantos, M. Optimised control approach for frequency-control contribution of variable speed wind turbines. IET Renew. Power Gener. 2012, 6, 17–23. [Google Scholar] [CrossRef]
- Zertek, A.; Verbic, G.; Pantos, M. A novel strategy variable-speed wind turbines’ participation in primary frequency control. IEEE Trans. Sustain. Energy 2012, 3, 791–799. [Google Scholar] [CrossRef]
- Chinchilla, M.; Arnaltes, S.; Burgos, J.C. Control of permanent-magnet generators applied to variable-speed wind-energy systems connected to the grid. IEEE Trans. Energy Convers. 2006, 21, 130–135. [Google Scholar] [CrossRef]
- Qiao, W.; Qu, L.; Harley, R.G. Control of IPM synchronous generator for maximum wind power generation considering magnetic saturation. IEEE Trans. Ind. Appl. 2009, 45, 1095–1105. [Google Scholar] [CrossRef]
- Kundur, P. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Kumar, M.; Perumal, N.; Irraivan, E. Advanced Pareto Front Non-Dominated Sorting Multi-Objective Particle Swarm Optimization for Optimal Placement and Sizing of Distributed Generation. Energies 2016, 9, 982. [Google Scholar] [CrossRef]
- Su, H.Y.; Hsu, Y.L.; Chen, Y.C. PSO-based voltage control strategy for loadability enhancement in smart power grids. Appl. Sci. 2016, 6, 1. [Google Scholar] [CrossRef]
- Zeddini, M.A.; Pusca, R.; Sakly, A.; Mimouni, M.F. PSO-based MPPT control of wind-driven Self-Excited Induction Generator for pumping system. Renew. Energy 2016, 95, 162–177. [Google Scholar] [CrossRef]

















| Unit | Generator Type | Generation (MW) | Capacity (MW) |
|---|---|---|---|
| G1 | Steam turbine | 80 | 100 |
| G2 | Gas turbine | 40 | 50 |
| G3 | Hydro turbine | 60 | 70 |
| G4 | Hydro turbine | 50 | 60 |
| Total | - | 230 | 280 |
| Wind Farm | Sw (m/s) | ωm,opt (p.u.) | Pmax (MW) | Case 1 (MW) | Case 2 (MW) | Case 3 (MW) |
|---|---|---|---|---|---|---|
| 1 | 11.2 | 1.12 | 13.984 | 13.984 | 13.28 | 13.848 |
| 2 | 9.3 | 0.93 | 8.006 | 8.006 | 7.605 | 7.677 |
| 3 | 8.4 | 0.84 | 5.896 | 5.896 | 5.608 | 5.416 |
| 4 | 7.6 | 0.76 | 4.368 | 4.368 | 4.152 | 3.872 |
| 5 | 10.0 | 1.00 | 9.952 | 9.952 | 9.448 | 9.280 |
| Total | - | - | 42.206 | 42.206 | 40.093 | 40.093 |
| Wind Farm | Case 2 | Case 3 | ||
|---|---|---|---|---|
| ωdel (p.u.) | KE (MWs) | ωdel (p.u.) | KE (MWs) | |
| 1 | 1.200 | 8.504 | 1.200 | 8.504 |
| 2 | 1.087 | 14.496 | 1.077 | 13.512 |
| 3 | 0.983 | 11.920 | 1.027 | 15.944 |
| 4 | 0.889 | 9.760 | 0.962 | 15.976 |
| 5 | 1.170 | 16.896 | 1.200 | 20.160 |
| Total | - | 61.576 | - | 74.096 |
© 2017 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, M.-K. Optimal Control and Operation Strategy for Wind Turbines Contributing to Grid Primary Frequency Regulation. Appl. Sci. 2017, 7, 927. https://doi.org/10.3390/app7090927
Kim M-K. Optimal Control and Operation Strategy for Wind Turbines Contributing to Grid Primary Frequency Regulation. Applied Sciences. 2017; 7(9):927. https://doi.org/10.3390/app7090927
Chicago/Turabian StyleKim, Mun-Kyeom. 2017. "Optimal Control and Operation Strategy for Wind Turbines Contributing to Grid Primary Frequency Regulation" Applied Sciences 7, no. 9: 927. https://doi.org/10.3390/app7090927
APA StyleKim, M. -K. (2017). Optimal Control and Operation Strategy for Wind Turbines Contributing to Grid Primary Frequency Regulation. Applied Sciences, 7(9), 927. https://doi.org/10.3390/app7090927