Novel Measurement Method for Determining Mass Characteristics of Pico-Satellites


Abstract
:1. Introduction
2. The Measurement Principle of Mass Characteristic
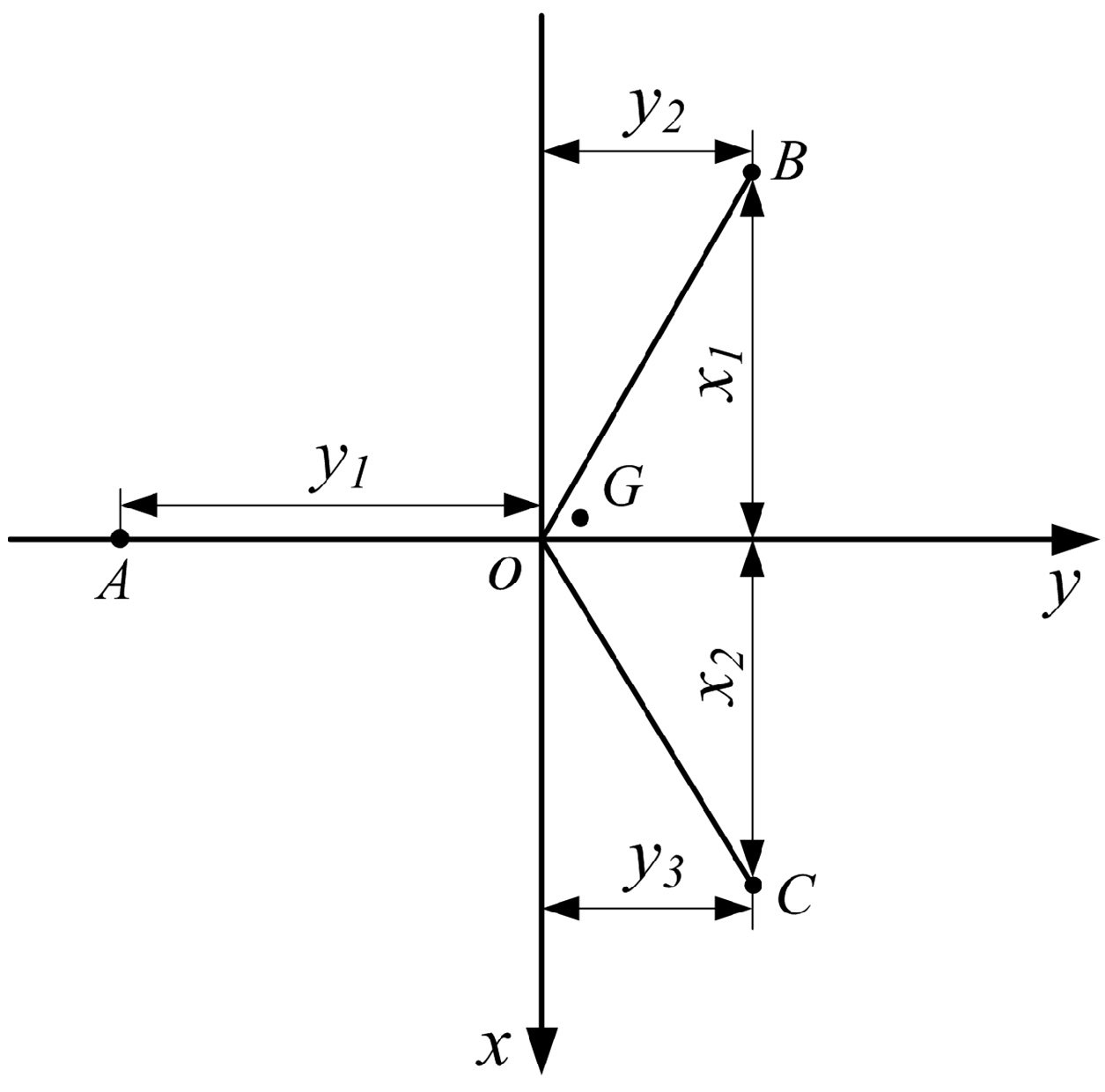
2.1. Principles of Measurement of Mass Characteristics
2.2. Test Principle for Determining the Moment of Inertia
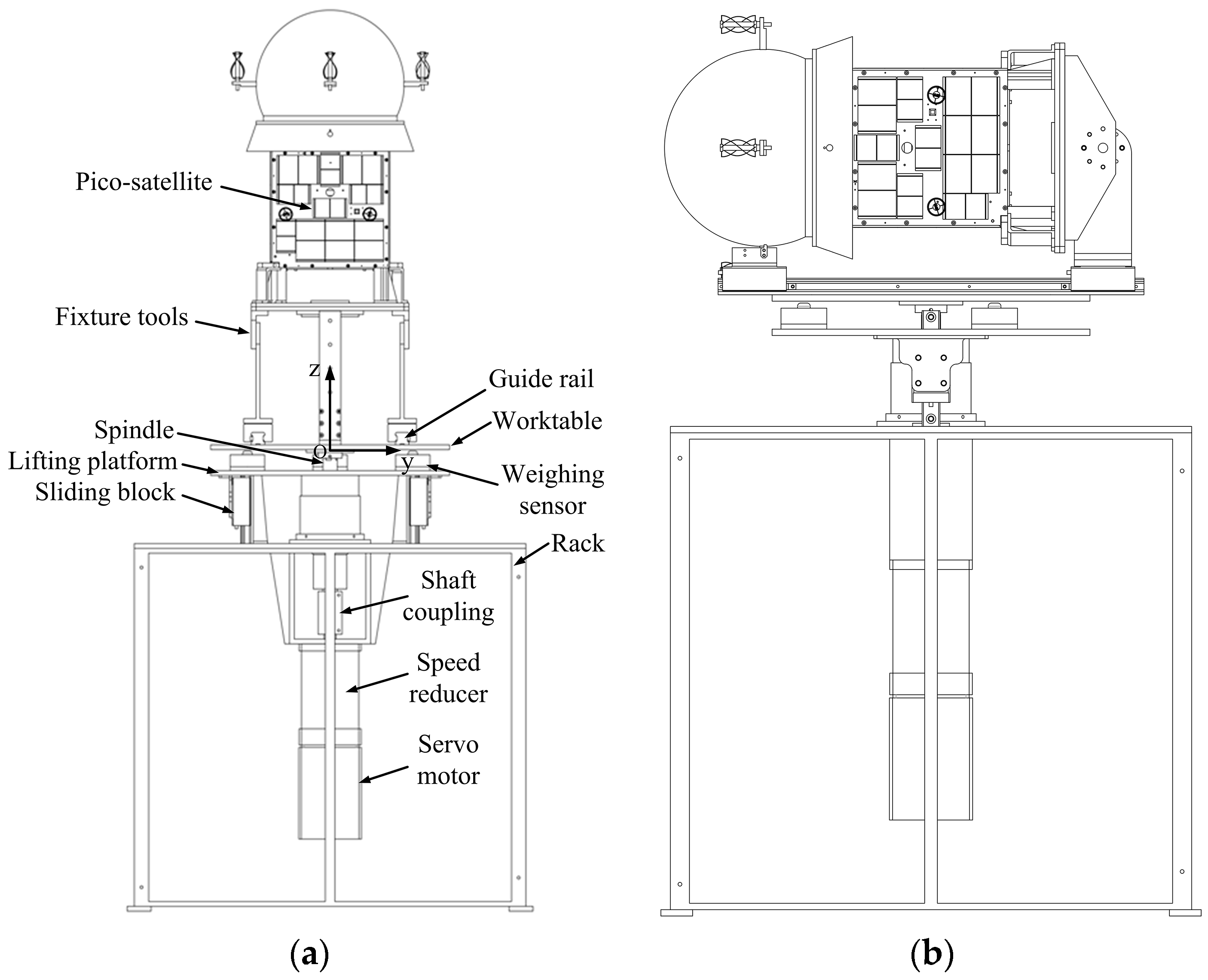
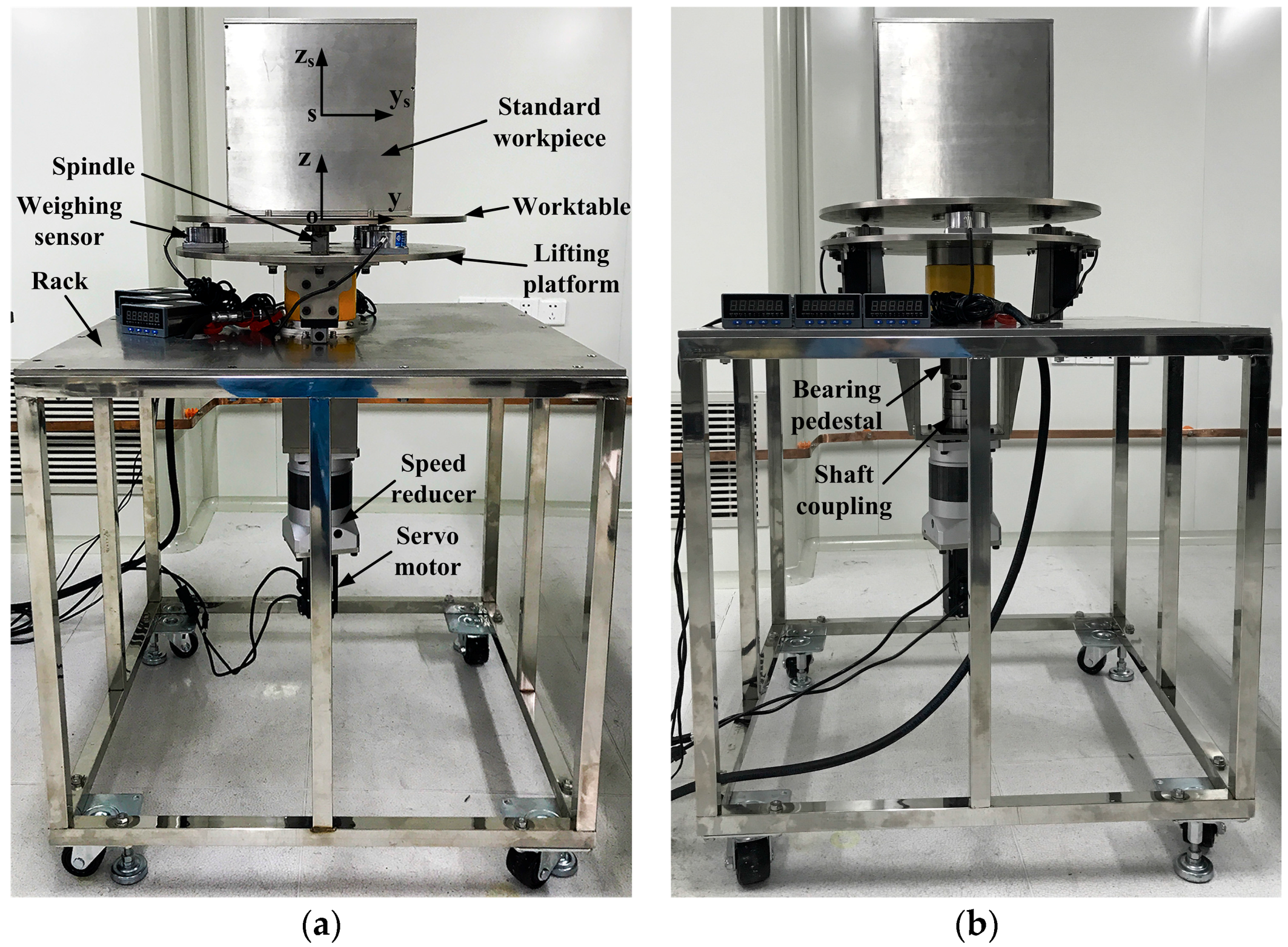
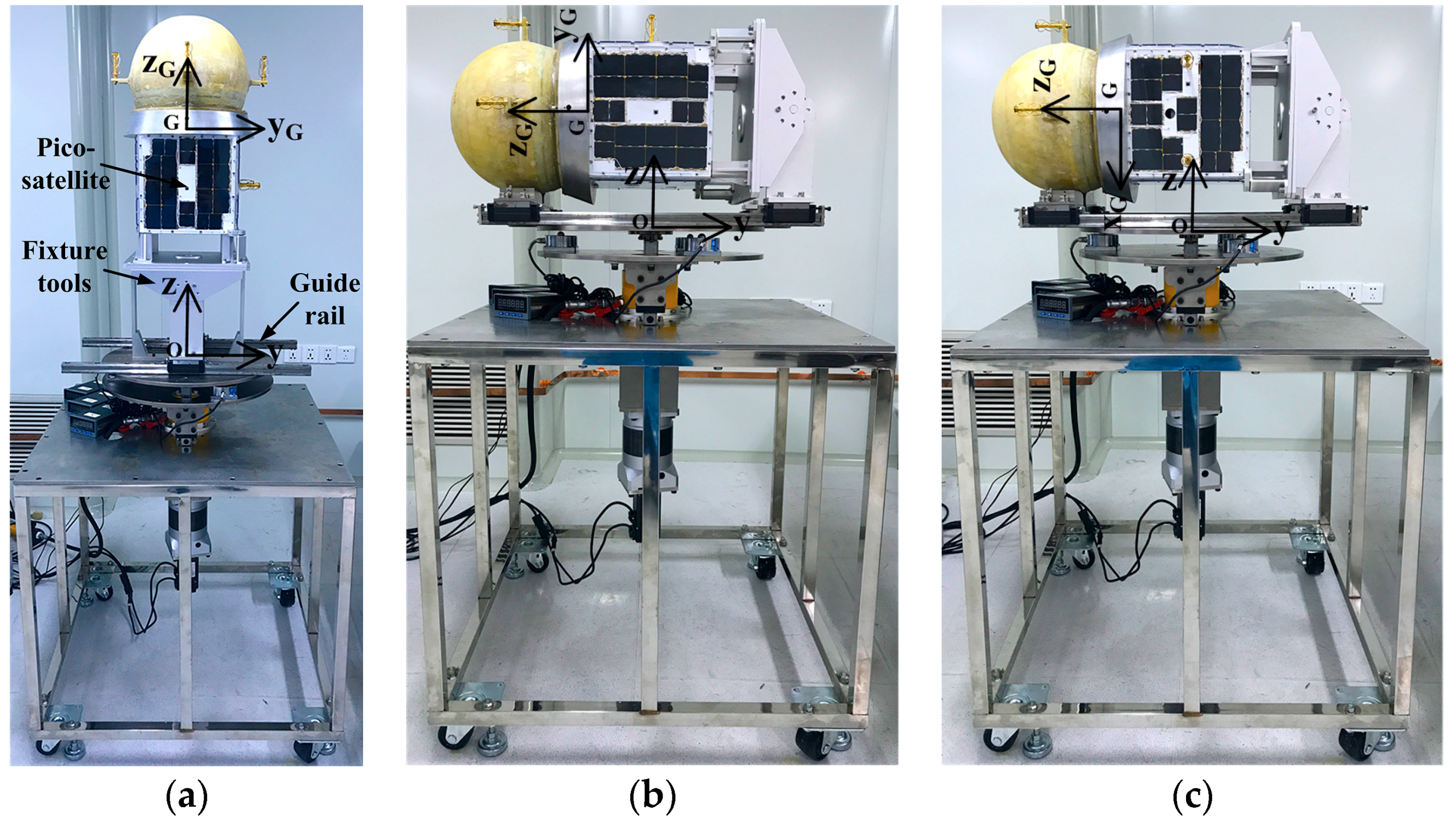
3. Measurement System to Determine Mass Characteristics
4. Simulation and Experiment of the Standard Workpiece
4.1. Simulation Measurement of the Centroid of the Standard Workpiece
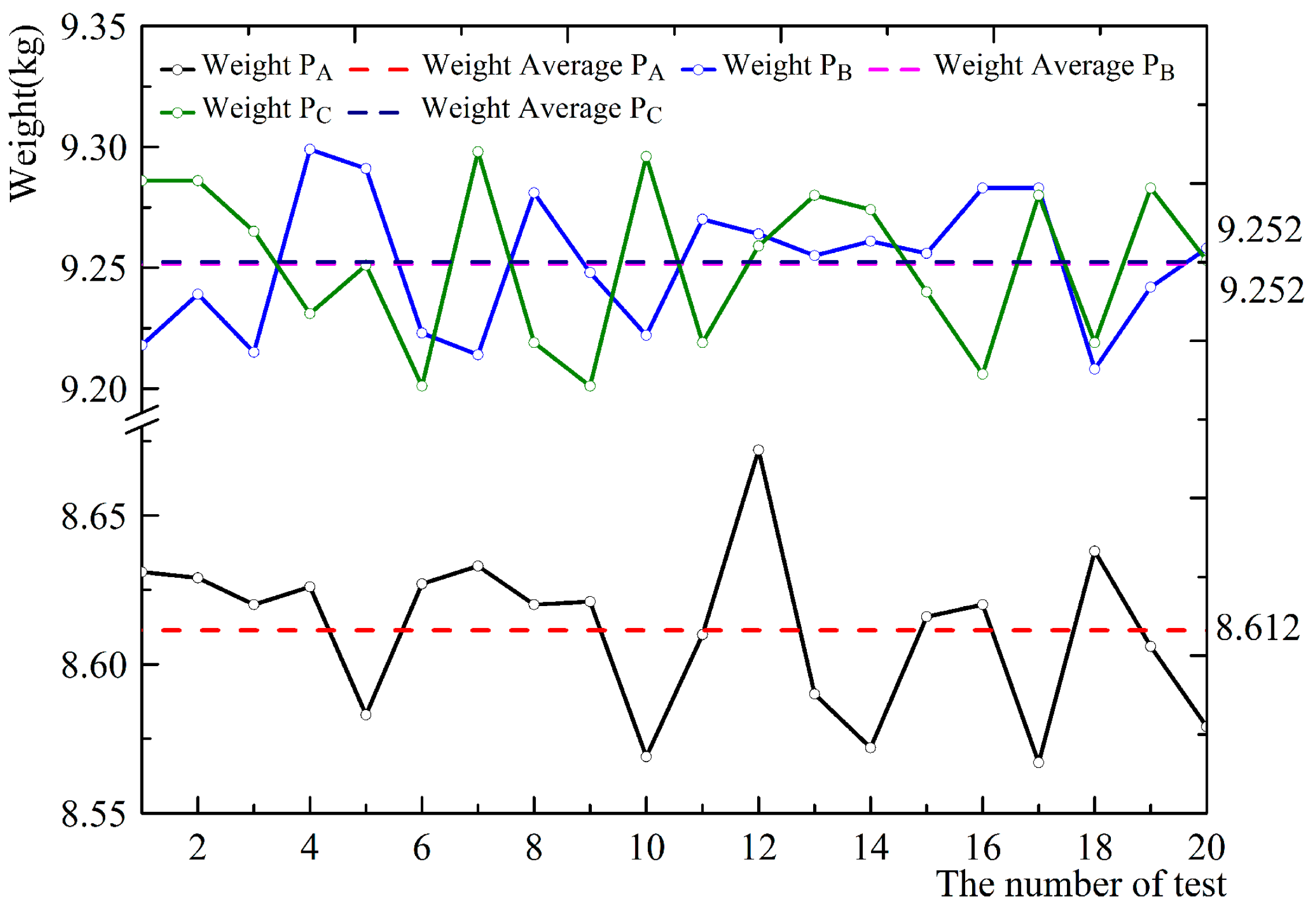
4.2. Experimental Measurement of the Centroid of the Standard Workpiece
4.3. Simulation Measurement of the Moment of Inertia of the Standard Workpiece
4.4. Experimental Measurement of the Moment of Inertia of the Standard Workpiece
5. Measurement of Mass Characteristics of the Pico-Satellite
5.1. Determination of Centroid of Pico-Satellite
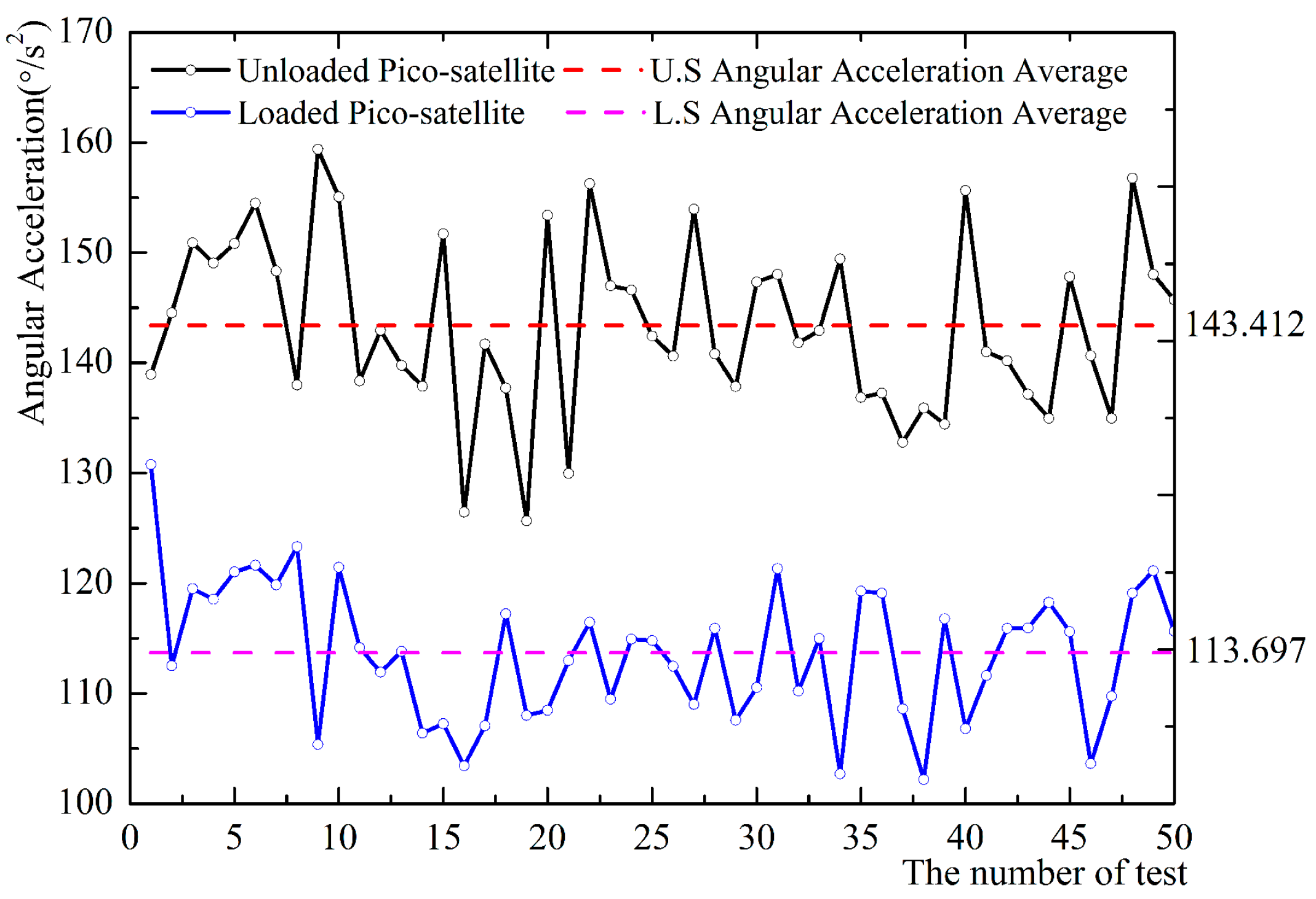
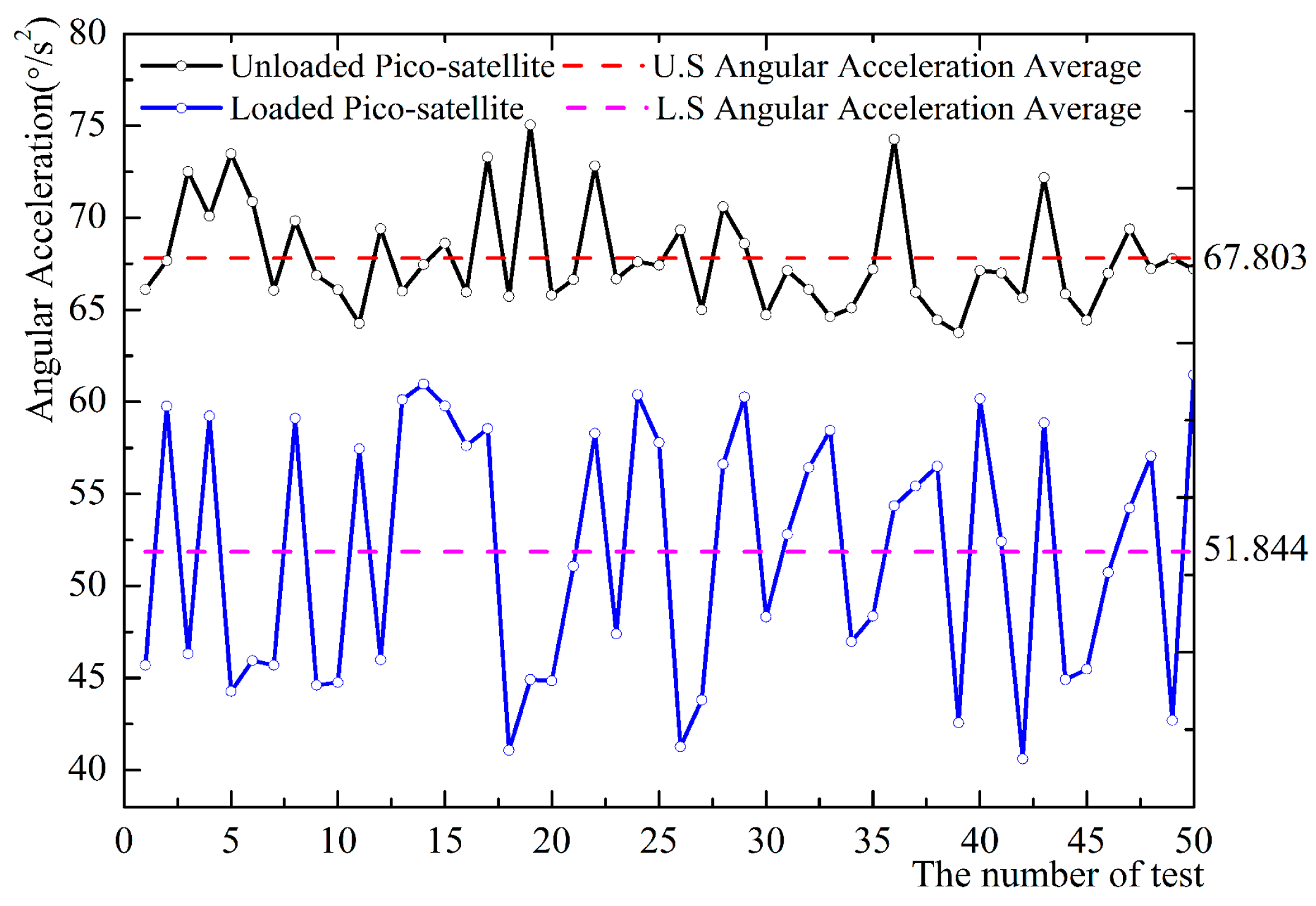
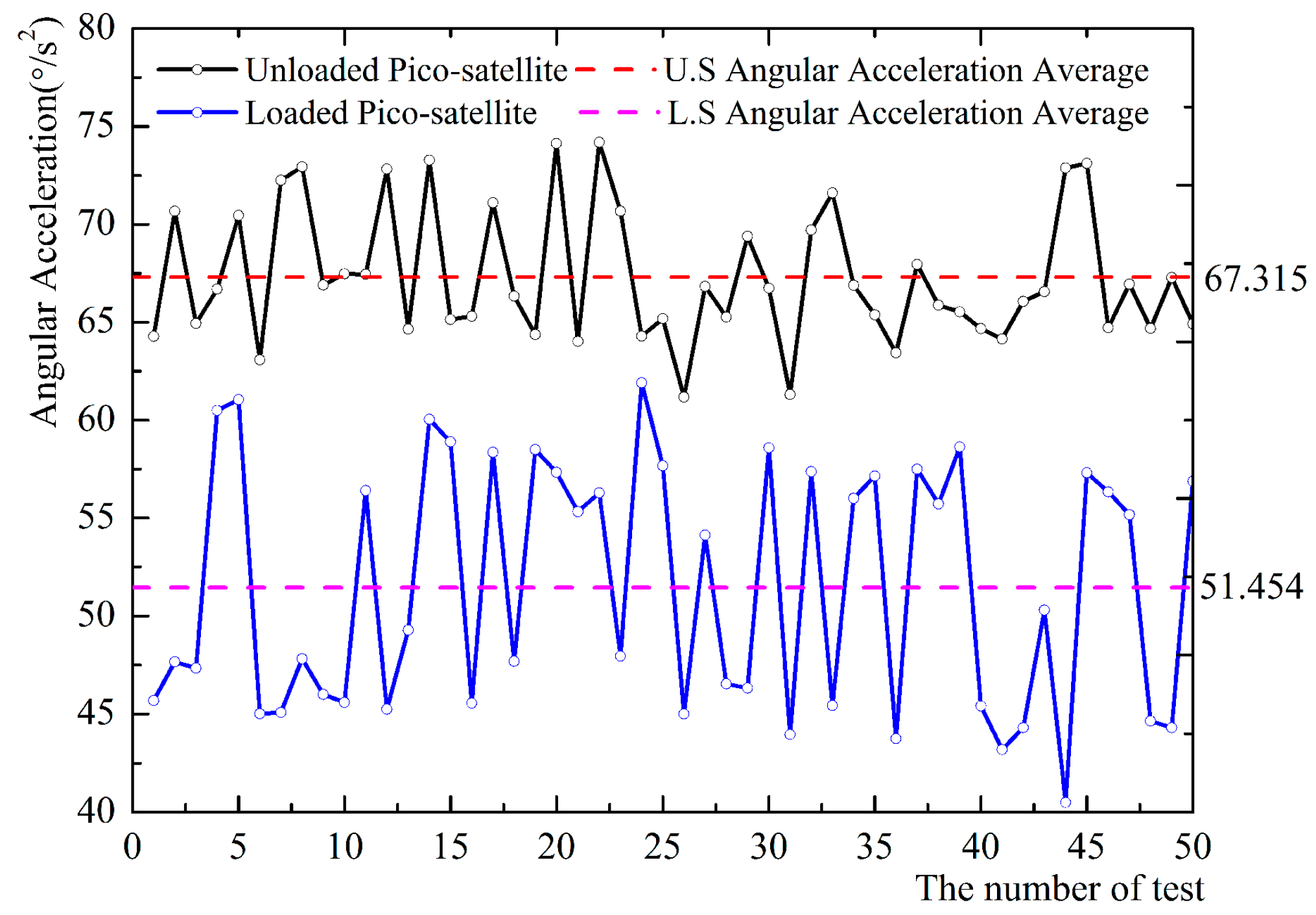
5.2. Measurement of the Moment of Inertia of the Pico-Satellite
6. Discussion
7. Conclusions
Author Contributions
Conflicts of Interest
References
- Bacaro, M.; Cianetti, F.; Alvino, A. Device for measuring the inertia properties of space payloads. Mech. Mach. Theory 2014, 74, 134–153. [Google Scholar] [CrossRef]
- Bergmann, E.V.; Dzielski, J. Spacecraft mass property identification with torque generating control. J. Guid. Control Dyn. 1990, 13, 99–103. [Google Scholar] [CrossRef]
- Boynton, R. Mass properties measurement errors which could have been easily avoided. In Proceedings of the 58th Annual Conference of the Society of Allied Weight Engineers, San Jose, CA, USA, 24–26 May 1999. [Google Scholar]
- Psiaki, M.L. Estimation of a Spacecraft’s attitude dynamics parameters by using flight data. J. Guid. Control Dyn. 2005, 28, 594–603. [Google Scholar] [CrossRef]
- Qin, L.; Zhang, W.; Zhang, H.; Xu, W. Attitude measurement system based on micro-silicon accelerometer array. Chaos Solitons Fractals 2006, 29, 141–147. [Google Scholar] [CrossRef]
- Bois, J.L.D.; Lieven, N.A.; Adhikari, S. Error analysis in trifilar inertia measurements. Exp. Mech. 2009, 49, 533–540. [Google Scholar] [CrossRef]
- Dong, H.K.; Yang, S.; Cheon, D.I.; Lee, S.; Oh, H.S. Combined estimation method for inertia properties of STSAT-3. J. Mech. Sci. Technol. 2010, 24, 1737–1741. [Google Scholar]
- Norman, M.C.; Peck, M.A.; O’Shaughnessy, D.J. In-orbit estimation of inertia and momentum-actuator alignment parameters. J. Guid. Control Dyn. 2011, 34, 1798–1814. [Google Scholar] [CrossRef]
- Zhu, T.; Li, F. Experimental investigation and performance analysis of inertia properties measurement for heavy truck cab. Adv. Mech. Eng. 2015, 7. [Google Scholar] [CrossRef]
- Chashmi, S.Y.N.; Malaek, S.M. Fast estimation of space-robots inertia parameters: Amodular mathematical formulation. Acta Astronaut. 2016, 127, 283–295. [Google Scholar] [CrossRef]
- Lee, A.Y.; Wertz, J.A. In-Flight estimation of the Cassini Spacecraft’s inertia tensor. J. Spacecr. Rocket. 2002, 39, 153–154. [Google Scholar] [CrossRef]
- Peterson, W.L. Mass properties measurement in the X-38 project. In Proceedings of the 63rd Annual Conference of the Society of Allied Weight Engineers, Newport Beach, CA, USA, 17–19 May 2004. [Google Scholar]
- Ma, O.; Dang, H.; Pham, K. On-orbit identification of inertia properties of spacecraft using a robotic arm. J. Guid. Control Dyn. 2008, 31, 1761–1771. [Google Scholar] [CrossRef]
- Hou, Z.C.; Lu, Y.N.; Lao, Y.X.; Liu, D. A new trifilar pendulum approach to identify all inertia parameters of a rigid body or assembly. Mech. Mach. Theory 2009, 44, 1270–1280. [Google Scholar] [CrossRef]
- Tang, L.; Shangguan, W.B. An improved pendulum method for the determination of the center of gravity and inertia tensor for irregular-shaped bodies. Measurement 2011, 44, 1849–1859. [Google Scholar] [CrossRef]
- Hejtmánek, P.; Blatˇák, O.; Kucˇera, P.; Porteš, P.; Vancˇura, J. Measuring the yaw moment of inertia of a vehicle. J. Middle Eur. Constr. Des. Cars 2013, 11, 16–22. [Google Scholar] [CrossRef]
- Dudarenko, N.; Melnikov, V.; Melnikov, G. A method for inertia tensors and centres of masses identification on symmetric precessions. In Proceedings of the 6th International Congress on Ultra Modern Telecommunications and Control Systems and Workshops (ICUMT), St. Petersburg, Russia, 6–8 October 2014. [Google Scholar]
- Zhang, F.; Sharf, I.; Misra, A.; Huang, P.F. On-line estimation of inertia parameters of space debris for its tether-assisted removal. Acta Astronaut. 2015, 107, 150–162. [Google Scholar] [CrossRef]
- Shakoori, A.; Betin, A.V.; Betin, D.A. Comparison of three methods to determine the inertial properties of free-flying dynamically similar models. J. Eng. Sci. Technol. 2016, 11, 1360–1372. [Google Scholar]
- Mondal, N.; Acharyya, S.; Saha, R.; Sanyal, D.; Majumdar, K. Optimum design of mounting components of a mass property measurement system. Measurement 2016, 78, 309–321. [Google Scholar] [CrossRef]
- Zhai, K.; Wang, T.S.; Meng, D.B. Optimal excitation design for identifying inertia parameters of spacecraft. Acta Astronaut. 2017, 140, 370–379. [Google Scholar] [CrossRef]
- Fakhari, V.; Shokrollahi, S. A theoretical and experimental disturbance analysis in a product of inertia measurement system. Measurement 2017, 107, 142–152. [Google Scholar] [CrossRef]
- Brancati, R.; Russo, R.; Savino, S. Method and equipment for inertia parameter identification. Mech. Syst. Signal Process. 2010, 24, 29–40. [Google Scholar] [CrossRef]
- Fu, Y.X.; Jiang, W.S.; Qin, X.S.; Tan, X.Q. Key techniques for the integration of mass, mass and moment of inertia. Machinery 2014, 52, 60–63. [Google Scholar]
- Chen, S.L. The angular momentum theorem for the instantaneous axis. J. Cent. China Norm. Univ. 1988, 20, 135–138. [Google Scholar]
- Abdulghany, A.R. Generalization of parallel axis theorem for rotational inertia. Am. J. Phys. 2017, 85, 791–795. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Motor Model | Rated Power (KM) | Rated Speed (rpm) | Rated Torque (Nm) | Peak Torque (Nm) |
|---|---|---|---|---|
| LCMT-04L02NB-60M01330B | 0.4 | 3000 | 1.27 | 3.8 |
| Model | Deceleration Ratio (i) | Unload Torque (Nm) | Rated Output Torque (Nm) | Maximum Output Torque (Nm) |
|---|---|---|---|---|
| LICHUAN-PLF120 | 20 | 0.6 | 250 | 500 |
| Model | Supply Voltage (V) | Measuring Mileage (kg) | Measurement Accuracy (%) |
|---|---|---|---|
| XSB5-CHK1R2V0 | AC100–240 | 0–100 | ±0.05 |
| Model | Supply Voltage | Angular Velocity Range (°/s) | Resolution Ratio of Angular Velocity (°/s) |
|---|---|---|---|
| WEITE-JY61 | DC3.3–5 V | ±2000 | 7.6 × 10−3 |
| Centroid Deviation (mm) | Centroid Deviation (mm) | Centroid Deviation (mm) | Deviation of Moment of Inertia (kgm2) |
|---|---|---|---|
| Mass (kg) | Centroid Coordinates (mm) | (kgm2) | (kgm2) |
|---|---|---|---|
| 26.647 | = −0.032, = 0.032, = 154.995 | 5.885 × 10−1 | 5.885 × 10−1 |
| Mass (kg) | Adams Simulation Coordinates (mm) | Solidworks Simulation Coordinate (mm) | Deviation (mm) |
|---|---|---|---|
| 8.880, | , | , | |
| 8.886, | , | , | |
| 8.881 |
| Mass (kg) | Experimental Value (kg) | Theoretical Value (kg) | Deviation between Theory and Experiment (kg) | Experimental Coordinate (mm) | Solidworks Theoretical Coordinate (mm) | Deviation (mm) |
|---|---|---|---|---|---|---|
| 8.612 | 8.880 | 0.268 | , | , | ||
| 9.252 | 8.886 | −0.366 | , | , | ||
| 9.252 | 8.881 | −0.371 |
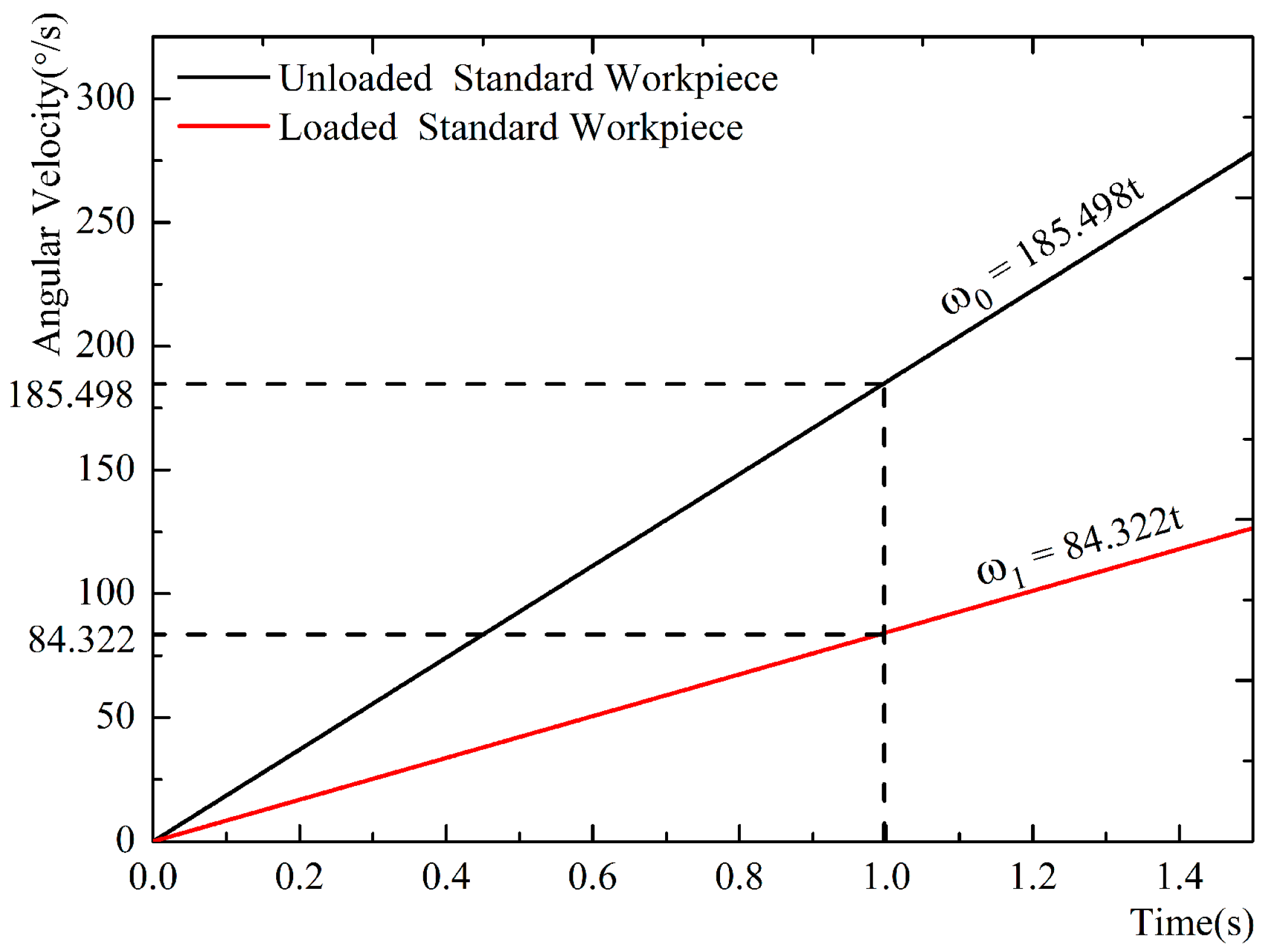
| Time (s) | (°/s) | (°/s) | (kgm2) | (kgm2) |
|---|---|---|---|---|
| 185.498 | 84.322 | 4.905 × 10−1 | 5.885 × 10−1 |
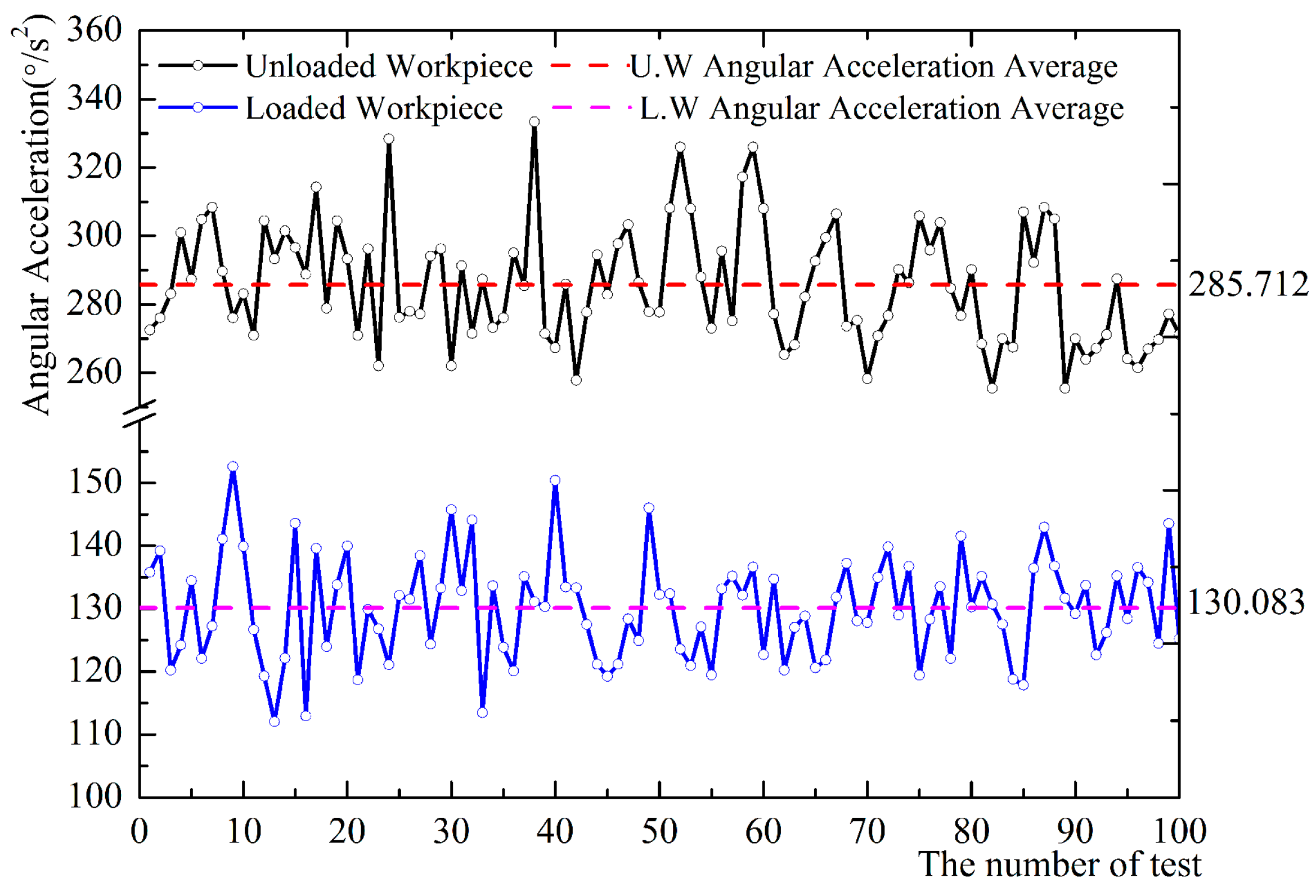
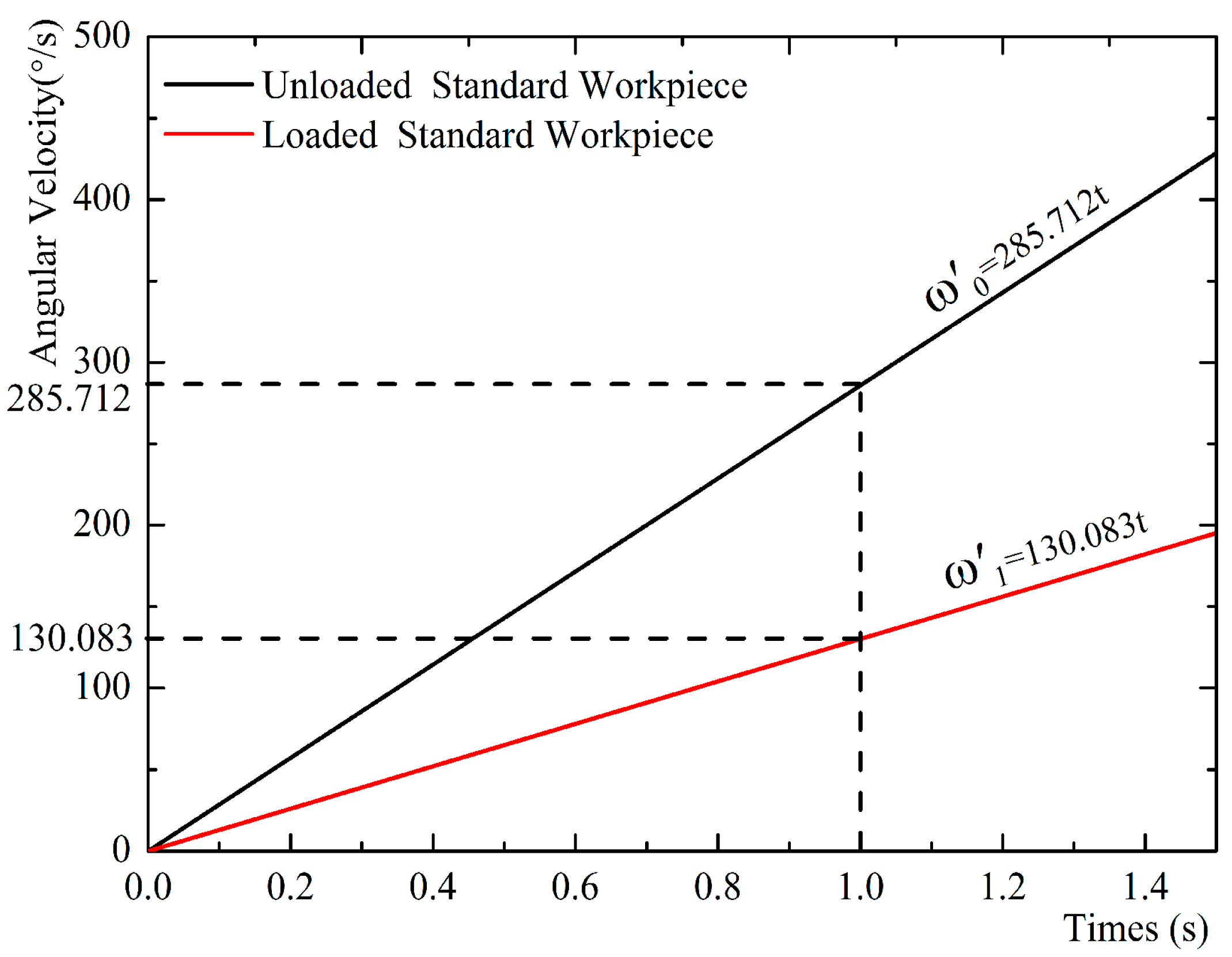
| Time(s) | (°/s2) | (°/s2) | (kgm2) | (kgm2) | (kgm2) | Deviation (kgm2) |
|---|---|---|---|---|---|---|
| 285.712 | 130.083 | 4.905 × 10−1 | 5.869 × 10−1 | 5.885 × 10−1 | 1.6 × 10−3 |
| Mass (kg) | Centroid Coordinates (mm) | (kgm2) | (kgm2) | (kgm2) |
|---|---|---|---|---|
| 24.241 | = −0.173, = 8.688, = 581.196 | 5.724 × 10−1 | 5.692 × 10−1 | 2.8 × 10−1 |
| State | Mass (kg) | 1 | 2 | 3 | 4 | 5 | Average Value (kg) |
|---|---|---|---|---|---|---|---|
| Vertical Position | 10.627 | 10.635 | 10.639 | 10.627 | 10.620 | 10.630 | |
| 11.152 | 11.140 | 11.155 | 11.164 | 11.164 | 11.155 | ||
| 11.509 | 11.494 | 11.512 | 11.500 | 11.506 | 11.504 | ||
| Horizontal Position- | 15.582 | 15.216 | 15.574 | 15.570 | 15.574 | 15.503 | |
| 13.979 | 13.997 | 13.967 | 13.982 | 13.982 | 13.981 | ||
| 14.178 | 14.370 | 14.169 | 14.172 | 14.175 | 14.213 | ||
| Horizontal Position- | 15.199 | 15.209 | 15.212 | 15.216 | 15.216 | 15.210 | |
| 14.061 | 14.051 | 14.054 | 14.057 | 14.057 | 14.056 | ||
| 14.391 | 14.358 | 14.352 | 14.352 | 14.355 | 14.362 |
| State | Mass (kg) | 1 | 2 | 3 | 4 | 5 | Average Value (kg) | Experimental Coordinate Value (mm) | Theoretical Coordinate Value (mm) | Deviation (mm) |
|---|---|---|---|---|---|---|---|---|---|---|
| Vertical Position | 7.068 | 7.068 | 7.069 | 7.045 | 7.045 | 7.059 | 0.766 1.271 | |||
| 8.924 | 8.936 | 8.885 | 8.873 | 8.873 | 8.898 | |||||
| 8.754 | 8.769 | 8.751 | 8.781 | 8.766 | 8.764 | |||||
| Horizontal Position- | 14.268 | 14.261 | 14.258 | 14.256 | 14.267 | 14.262 | 0.433 0.208 | |||
| 5.286 | 5.314 | 5.299 | 5.323 | 5.326 | 5.310 | |||||
| 5.159 | 5.216 | 5.322 | 5.213 | 5.204 | 5.223 | |||||
| Horizontal Position- | 14.277 | 14.282 | 14.218 | 14.218 | 14.220 | 14.243 | 0.046 0.451 | |||
| 5.241 | 5.208 | 5.235 | 5.226 | 5.226 | 5.227 | |||||
| 5.342 | 5.168 | 5.372 | 5.376 | 5.372 | 5.326 |
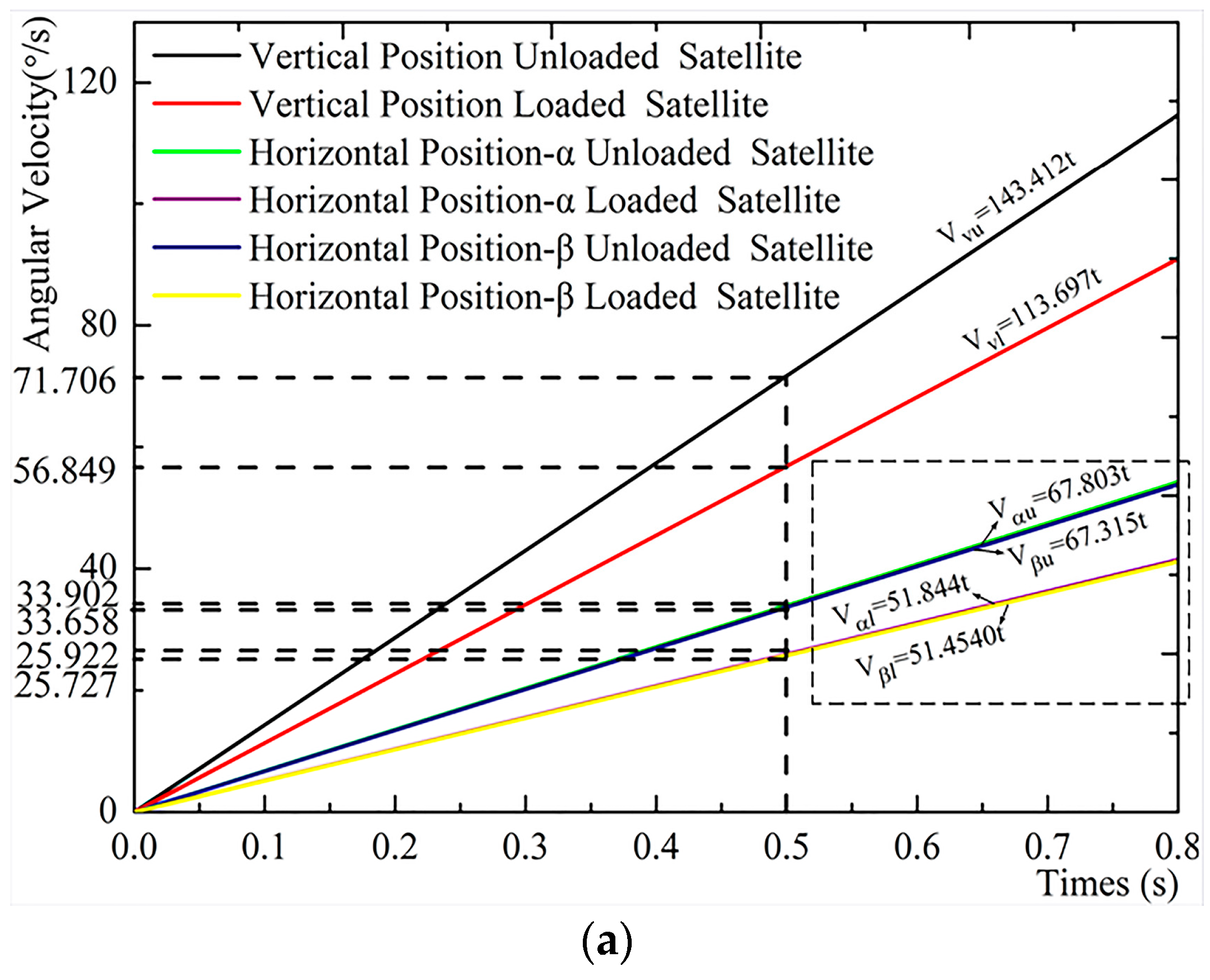
| Vertical Position | Horizontal Position- | Horizontal Position- | Center of Mass Moment of Inertia (kgm2) | Center of Mass Theory Moment of Inertia (kgm2) | Deviations (kgm2) | |
|---|---|---|---|---|---|---|
| (°/s) | 71.706 | 33.902 | 33.658 | 2.817 × 10−1 5.841 × 10−1 5.861 × 10−1 | 2.8 × 10−1 5.692 × 10−1 5.724 × 10−1 | 1.7 × 10−3 1.49 × 10−2 1.37 × 10−2 |
| (°/s) | 56.849 | 25.922 | 25.727 | |||
| (kgm2) | 1.087 | 2.395 | 2.395 | |||
| (kgm2) | 2.841 × 10−1 | 7.373 × 10−1 | 7.383 × 10−1 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Teng, L.; Yang, H.; Jin, Z. Novel Measurement Method for Determining Mass Characteristics of Pico-Satellites. Appl. Sci. 2018, 8, 104. https://doi.org/10.3390/app8010104
Teng L, Yang H, Jin Z. Novel Measurement Method for Determining Mass Characteristics of Pico-Satellites. Applied Sciences. 2018; 8(1):104. https://doi.org/10.3390/app8010104
Chicago/Turabian StyleTeng, Lai, Hao Yang, and Zhonghe Jin. 2018. "Novel Measurement Method for Determining Mass Characteristics of Pico-Satellites" Applied Sciences 8, no. 1: 104. https://doi.org/10.3390/app8010104
APA StyleTeng, L., Yang, H., & Jin, Z. (2018). Novel Measurement Method for Determining Mass Characteristics of Pico-Satellites. Applied Sciences, 8(1), 104. https://doi.org/10.3390/app8010104