Bio-Inspired Adhesive Footpad for Legged Robot Climbing under Reduced Gravity: Multiple Toes Facilitate Stable Attachment





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Footpad Design
3. Adhesion Performance
3.1. Pull-Off Test
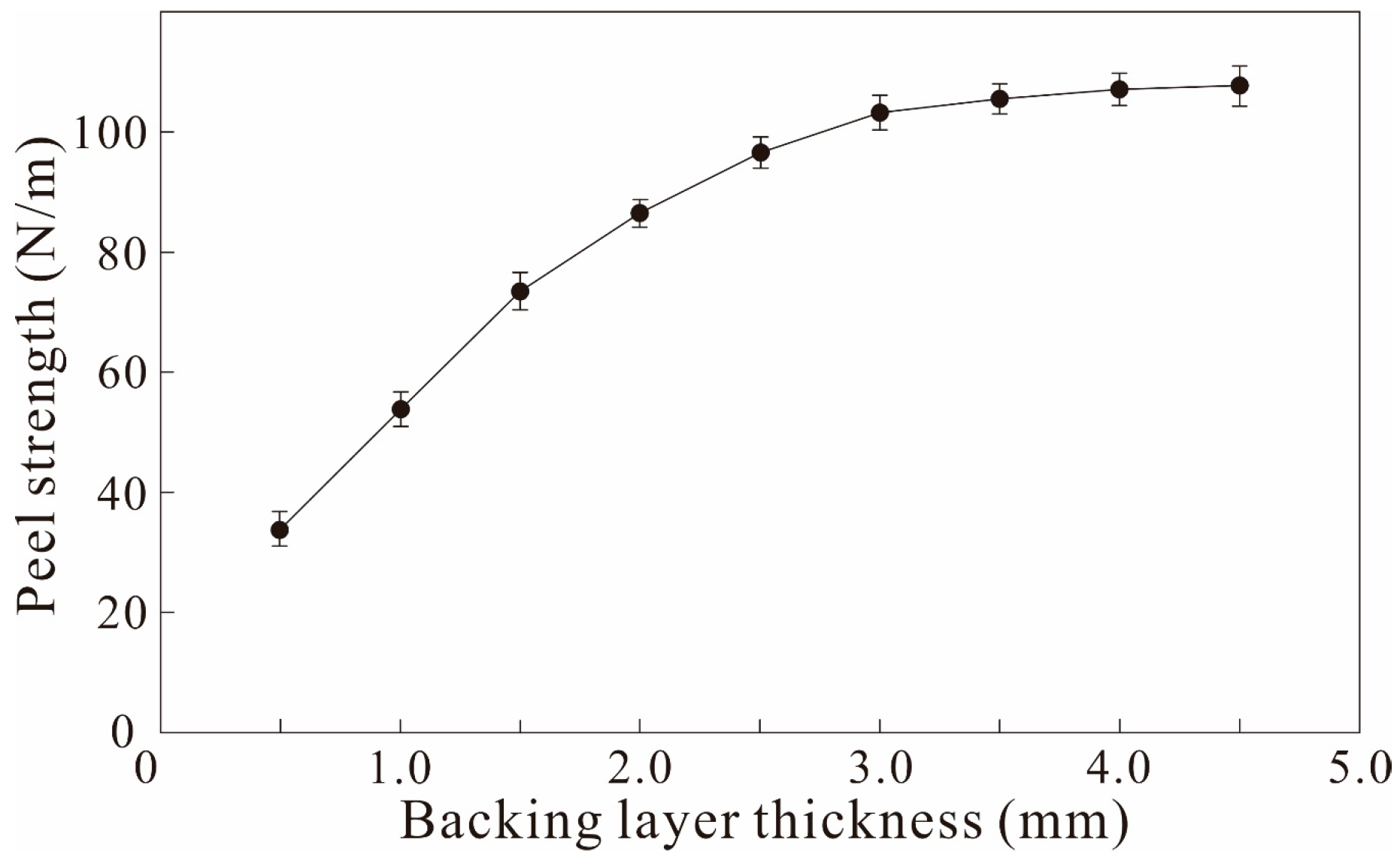
3.2. Peeling Test
4. Experiments on Robots
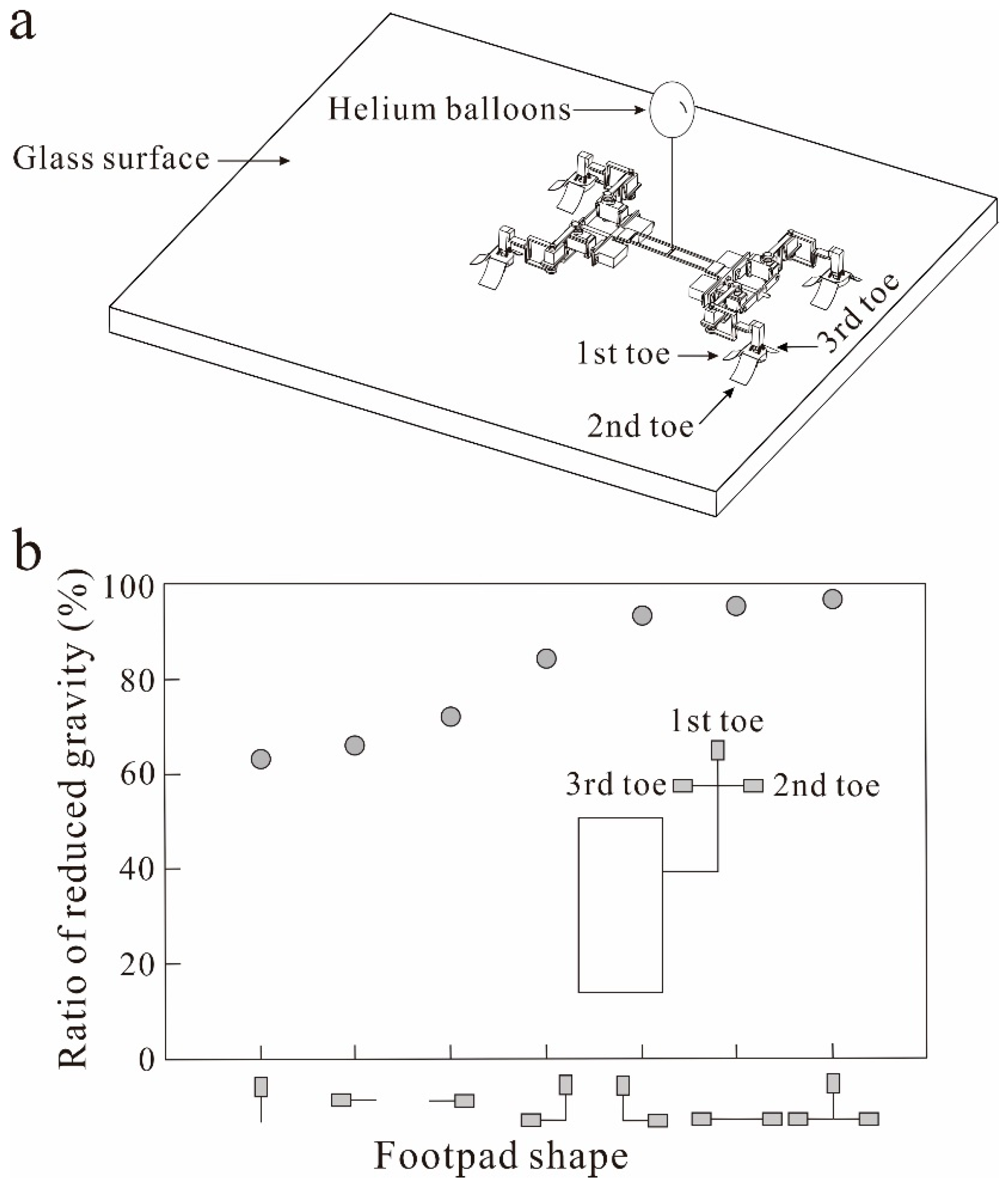
4.1. Climbing Ability with Different Toes
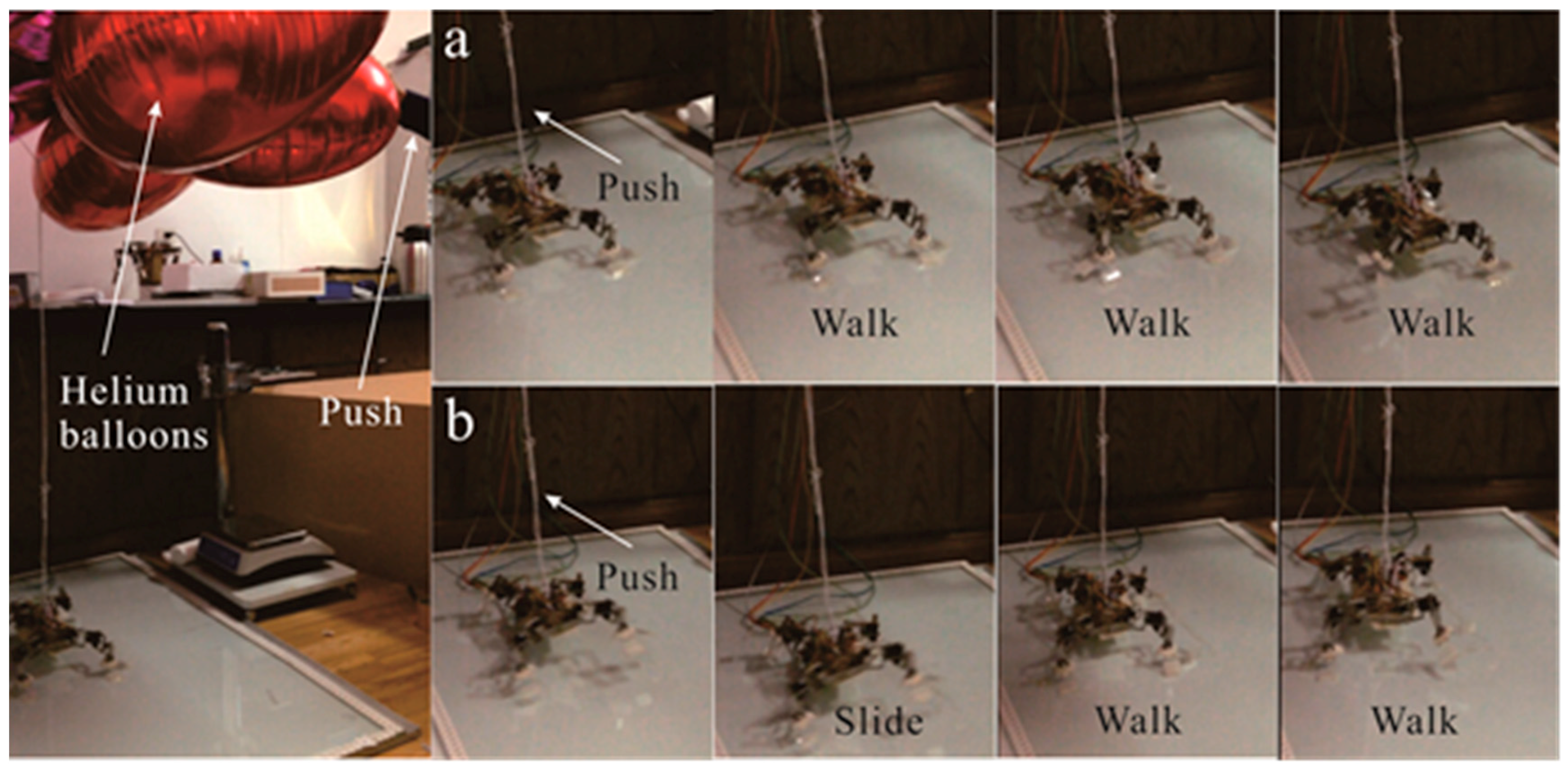
4.2. Climbing Performance with Lateral Impact
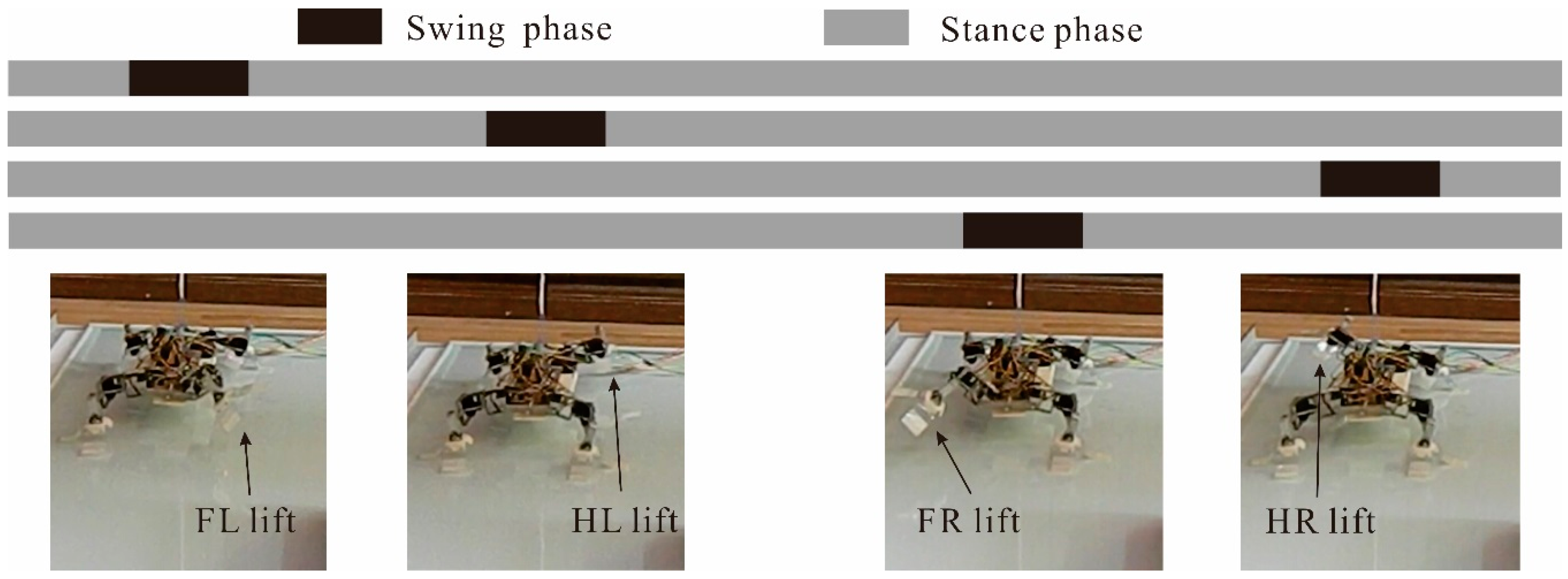
4.3. Climbing Ability of the Robot
5. Conclusions and Future Work
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Arzt, E.; Gorb, S.; Spolenak, R. From micro to nano contacts in biological attachment devices. Proc. Natl. Acad. Sci. USA 2003, 100, 10603–10606. [Google Scholar] [CrossRef] [PubMed]
- Cutkosky, M.R.; Kim, S. Design and fabrication of multi-material structures for bioinspired robots. Philos. Trans. R. Soc. A 2009, 367, 1799–1813. [Google Scholar] [CrossRef] [PubMed]
- Gorb, S.N.; Sinha, M.; Peressadko, A.; Daltorio, K.A.; Quinn, R.D. Insects did it first: A micropatterned adhesive tape for robotic applications. Bioinspir. Biomim. 2007, 2, S117. [Google Scholar] [CrossRef] [PubMed]
- Sitti, M.; Fearing, R.S. Synthetic gecko foot-hair micro/nano-structures for future wall-climbing robots. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA ‘03), Taipei, Taiwan, 14–19 September 2003. [Google Scholar]
- Campo, D.A.; Greiner, C.; Alvarez, I.; Arzt, E. Patterned surfaces with pillars with controlled 3D tip geometry mimicking bio-attachment devices. Adv. Mater. 2007, 19, 1973–1977. [Google Scholar] [CrossRef]
- Lee, D.Y.; Lee, D.H.; Lee, S.G.; Cho, K. Hierarchical geckoinspired nanohairs with a high aspect ratio induced by nanoyielding. Soft Matter 2007, 8, 4905–4910. [Google Scholar] [CrossRef]
- Davies, J.; Haq, S.; Hawke, T.; Sargent, J.P. A practical approach to the development of a synthetic gecko tape. Int. J. Adhes. Adhes. 2009, 29, 380–390. [Google Scholar] [CrossRef]
- Haefliger, D.; Boisen, A. Three-dimensional microfabrication in negative resist using printed masks. J. Micromech. Microeng. 2006, 16, 951–957. [Google Scholar] [CrossRef]
- Sameoto, D.; Menon, C. Direct molding of dry adhesives with anisotropic peel strength using an offset lift-off photoresist mold. J. Micromech. Microeng. 2009, 19, 115026. [Google Scholar] [CrossRef]
- Gorb, S.; Varenberg, M.; Peressadko, A.; Tuma, J. Biomimetic mushroom-shaped fibrillar adhesive microstructure. J. R. Soc. Interface 2007, 4, 271–275. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.; Sitti, M. Biologically inspired polymer microfibers with spatulate tips as repeatable fibrillar adhesives. Appl. Phys. Lett. 2006, 89, 261911. [Google Scholar] [CrossRef]
- Daltorio, K.A.; Wei, T.E.; Horchler, A.D.; Southard, L.; Wile, G.D.; Quinn, R.D.; Gorb, S.N.; Ritzmann, R.E. Mini-whegs TM climbs steep surfaces using insect-inspired attachment mechanisms. Int. J. Robot. Res. 2009, 28, 285–302. [Google Scholar] [CrossRef]
- Murphy, M.P.; Kute, C.; Mengüç, Y.; Sitti, M. Waalbot II: Adhesion recovery and improved performance of a climbing robot using fibrillar adhesives. Int. J. Robot. Res. 2011, 30, 118–133. [Google Scholar] [CrossRef]
- Unver, O.; Uneri, A.; Aydemir, A.; Sitti, M. Geckobot: A gecko inspired climbing robot using elastomer adhesives. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation (ICRA ’06), Orlando, FL, USA, 15–19 May 2006. [Google Scholar]
- Li, Y.; Ahmed, A.; Sameoto, D.; Menon, C. Abigaille II: Toward the development of a spider-inspired climbing robot. Robotica 2012, 30, 79–89. [Google Scholar] [CrossRef]
- Henrey, M.; Ahmed, A.; Boscariol, P.; Shannon, L.; Menon, C. Abigaille-III: A versatile, bioinspired hexapod for scaling smooth vertical surfaces. J. Bionic Eng. 2014, 11, 1–17. [Google Scholar] [CrossRef]
- Kim, S.; Spenko, M.; Trujillo, S.; Heyneman, B.; Santos, D.; Cutkosky, M.R. Smooth vertical surface climbing with directional adhesion. IEEE Trans. Robot. 2008, 24, 65–74. [Google Scholar]
- Dai, Z.; Sun, J. A biomimetic study of discontinuous-constraint metamorphic mechanism for gecko-like robot. J. Bionic Eng. 2007, 4, 91–95. [Google Scholar] [CrossRef]
- Wang, Z.; Dai, Z.; Yu, Z.; Shen, D. Optimal attaching and detaching trajectory for bio-inspired climbing robot using dry adhesive. In Proceedings of the 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2014), Besançon, France, 8–11 July 2014. [Google Scholar]
- Autumn, K.; Niewiarowski, P.H.; Puthoff, J.B. Gecko adhesion as a model system for integrative biology, interdisciplinary science, and bioinspired engineering. Annu. Rev. Evol. Syst. 2014, 45, 445–470. [Google Scholar] [CrossRef]
- Wang, Z.; Dai, Z.; Ji, A.; Ren, L.; Xing, Q.; Dai, L. Biomechanics of gecko locomotion: The patterns of reaction forces on inverted, vertical and horizontal substrates. Bioinspir. Biomim. 2015, 10, 016019. [Google Scholar] [CrossRef] [PubMed]
- Tian, Y.; Pesika, N.; Zeng, H.; Rosenberg, K.; Zhao, B.; McGuiggan, P.; Israelachvili, J. Adhesion and friction in gecko toe attachment and detachment. Proc. Natl. Acad. Sci. USA 2006, 103, 19320–19325. [Google Scholar] [CrossRef] [PubMed]
- Autumn, K.; Dittmore, A.; Santos, D.; Spenko, M.; Cutkosky, M. Frictional adhesion: A new angle on gecko attachment. J. Exp. Biol. 2006, 209, 3569–3579. [Google Scholar] [CrossRef] [PubMed]
- Autumn, K.; Hsieh, S.T.; Dudek, D.M.; Chen, J.; Chitaphan, C.; Full, R.J. Dynamics of geckos running vertically. J. Exp. Biol. 2006, 209, 260–272. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.J.; Peattie, A.M.; Autumn, K.; Full, R.J. Differential leg function in a sprawled-posture quadrupedal trotter. J. Exp. Biol. 2006, 209, 249–259. [Google Scholar] [CrossRef] [PubMed]
- Lepore, E.; Pugno, F.; Pugno, N.M. Optimal angles for maximal adhesion in living tokay geckos. J. Adhes. 2012, 88, 820–830. [Google Scholar] [CrossRef]
- Goldman, D.I.; Chen, T.S.; Dudek, D.M.; Full, R.J. Dynamics of rapid vertical climbing in cockroaches reveals a template. J. Exp. Biol. 2006, 209, 2990–3000. [Google Scholar] [CrossRef] [PubMed]
- Kendall, K. Thin-film peeling: The elastic term. J. Phy. D Appl. Phys. 1975, 8, 1449–1452. [Google Scholar] [CrossRef]
- Zhou, M.; Pesika, N.; Zeng, H.; Wan, J.; Zhang, X.; Meng, Y.; Wen, S.; Tian, Y. Design of gecko-inspired fibrillar surfaces with strong attachment and easy-removal properties: A numerical analysis of peel-zone. J. R. Soc. Interface 2012, 9, 2424–2436. [Google Scholar] [CrossRef] [PubMed]
- Amouroux, N.; Petit, J.; Léger, L. Role of interfacial resistance to shear stress on adhesive peel strength. Langmuir 2001, 17, 6510–6517. [Google Scholar] [CrossRef]
- Blum, F.D.; Metin, B.; Vohra, R.; Sitton, O.C. Surface segmental mobility and adhesion-Effects of filler and molecular mass. J. Adhes. 2006, 82, 903–917. [Google Scholar] [CrossRef]
- Marin, G.; Derail, C. Rheology and adherence of pressure-sensitive adhesives. J. Adhes. 2006, 82, 469–485. [Google Scholar] [CrossRef]
- Zhou, M.; Tian, Y.; Pesika, N.; Zeng, H.; Wan, J.; Meng, Y.; Wen, S. The extended peel zone model: Effect of peeling velocity. J. Adhes. 2011, 87, 1045–1058. [Google Scholar] [CrossRef]
- Endlein, T.; Ji, A.; Samuel, D.; Yao, N.; Wang, Z.; Barnes, W.J.P.; Federle, W.; Kappl, M.; Dai, Z. Sticking like sticky tape: Tree frogs use friction forces to enhance attachment on overhanging surfaces. J. R. Soc. Interface 2013, 10, 20120838. [Google Scholar] [CrossRef] [PubMed]









© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Wang, Z.; Dai, Z.; Gorb, S.N. Bio-Inspired Adhesive Footpad for Legged Robot Climbing under Reduced Gravity: Multiple Toes Facilitate Stable Attachment. Appl. Sci. 2018, 8, 114. https://doi.org/10.3390/app8010114
Wang Z, Wang Z, Dai Z, Gorb SN. Bio-Inspired Adhesive Footpad for Legged Robot Climbing under Reduced Gravity: Multiple Toes Facilitate Stable Attachment. Applied Sciences. 2018; 8(1):114. https://doi.org/10.3390/app8010114
Chicago/Turabian StyleWang, Zhongyuan, Zhouyi Wang, Zhendong Dai, and Stanislav N. Gorb. 2018. "Bio-Inspired Adhesive Footpad for Legged Robot Climbing under Reduced Gravity: Multiple Toes Facilitate Stable Attachment" Applied Sciences 8, no. 1: 114. https://doi.org/10.3390/app8010114
APA StyleWang, Z., Wang, Z., Dai, Z., & Gorb, S. N. (2018). Bio-Inspired Adhesive Footpad for Legged Robot Climbing under Reduced Gravity: Multiple Toes Facilitate Stable Attachment. Applied Sciences, 8(1), 114. https://doi.org/10.3390/app8010114