1. Introduction
Humanoid robots are expected to be useful in various environments where people live. The reason for this is that humanoid robots, which are close to humans in behavior and functionality, are easy to adapt to the living environment designed for human beings. In addition, while other robots have only a few controllable joints, humanoid robots have more than 20 joints and can negotiate various scenarios. Locomotion is necessary to work in various situations, and so far, many studies have been performed on stable walking motion generation techniques. In recent years, running, which is a movement mode including the flight phase with a faster moving speed compared to walking, has also attracted attention, and research is being advanced on running motion generation methods to improve the movement ability of a humanoid robot. Raibert et al. developed a running robot with a single linear leg [
1]. The bipedal robot ATRIAS has a four-bar leg mechanism that includes a series of elastic springs [
2,
3]. Hyon et al. developed a biologically inspired robot based on a dog-leg model [
4]. However, these robots do not have a human-like structure. Some studies have shown that bipedal humanoid robots can run [
5,
6,
7,
8,
9]. For example, the Advanced Step in Innovative MObility (ASIMO) humanoid robot, which was designed and developed by Honda, can run at a speed of 2.5 m/s [
10]. Toyota’s bipedal humanoid robot can run using a zero-moment-point (ZMP)-based running control system [
11]. The athlete robot developed by Niiyama et al. has a human-like musculoskeletal system built to execute dynamic motions, such as running [
12]. The bipedal robot MABEL, developed by researchers at the University of Michigan, has leg elasticity that originates from a leaf spring. It is the fastest-running of all currently available bipedal robots, having achieved a speed of 3 m/s with axial constraints on the y-axis [
13].
However, present humanoid robots cannot run as fast and stably as human beings, who can run at speeds ranging between 2 m/s and 13 m/s. The reason that ordinary humanoid robots cannot run as fast and stably as humans because they require both a large power output for kicking the ground and various stabilization control methods. In general, to increase the power output, actuators having large power output capacity are required. However, high power actuators are heavy and their use in the humanoid robots renders the robots heavy. Moreover, the actuators require higher power. Therefore, it is difficult to design humanoid robots that can achieve high power output and are light enough to jump. Ordinary humanoid robots can attain a power output of approximately 3.5 W/kg for the joints in the leg; however, humans generate around 16.7 W/kg in leg joints while running [
14]. In addition, various stabilization control methods such as considering the center of mass position, landing point, ground reaction force, and linear and angular momentum, are needed for stable running. However, present running stabilization methods do not consider motion during the flight phase. For example, several studies on running control have used the spring-loaded inverted pendulum (SLIP) model [
15,
16,
17]. This simple model does not consider the mass of the legs, which generates angular momentum by leg swinging [
18]. However, a humanoid that can perform human-like fast lower-leg swinging, generates large angular momentum during the flight phase, especially in the yaw direction. Some studies considered the angular momentum of the entire body; however, they focused mainly on only stance-phase movement [
19,
20]. Thus, in these studies, humanoids could run slowly without leg swing during the flight phase to decrease the angular momentum generated by leg motion. Therefore, the humanoid requires a method to compensate for angular momentum during the flight phase for high speed running.
For fast and stable running, various characteristics of human running have been identified in studies on human sciences and sport sciences, including the following:
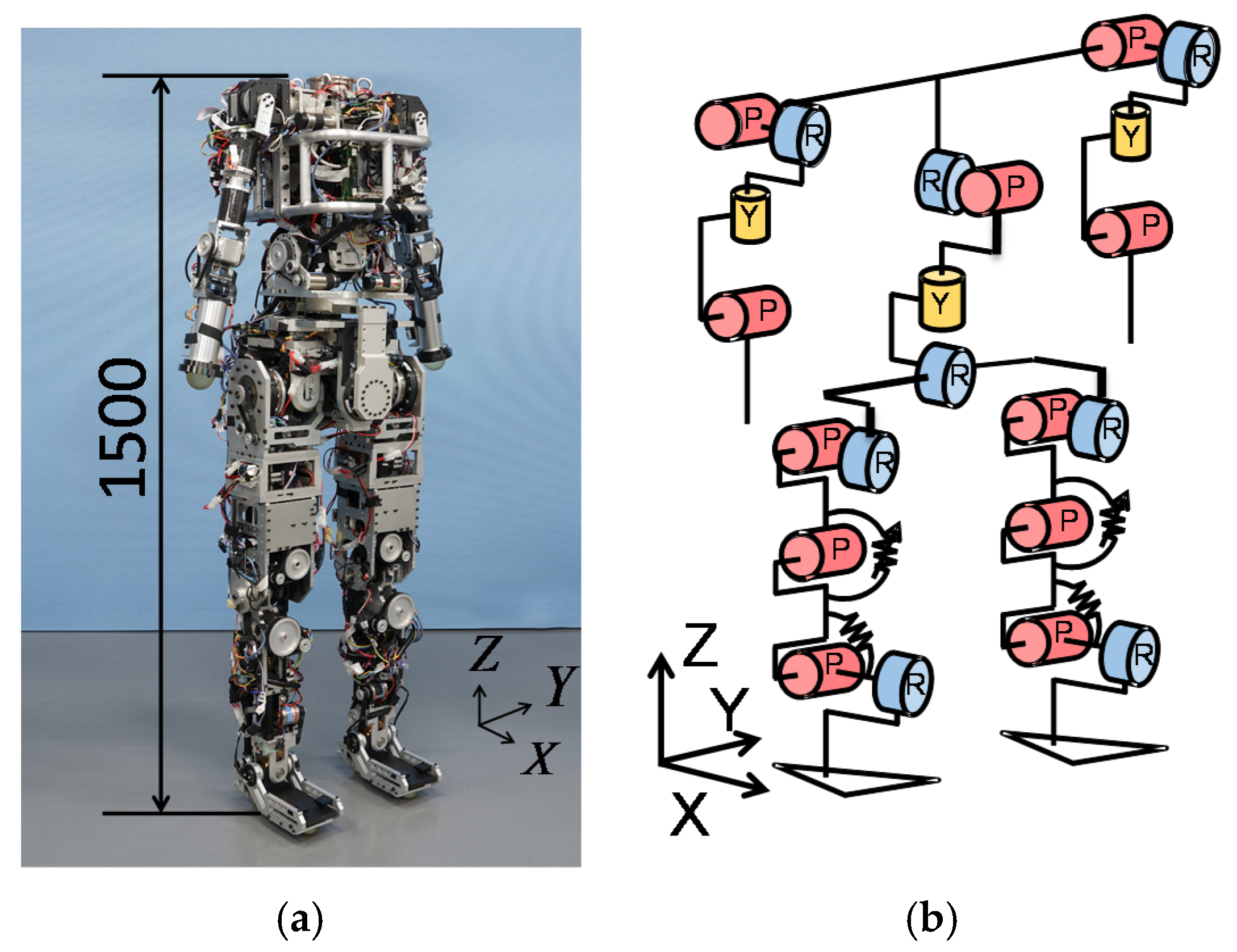
We are working to develop a robot that can run like a human by mimicking the above characteristics. Previously, we developed a lower-body robot that mimics human characteristics, such as leg joint stiffness and pelvic rotations in the frontal plane and can hop with a large joint output of approximately 1000 W by not dissipating the energy at landing but storing the energy in its elastic parts [
25,
28,
29]. In addition, the lower-body robot has the human link length and mass properties, such as the mass, center-of-mass (COM) position in the link, and inertial matrix of each link. The reason for this is that link length and mass properties would result in angular momentum. The currently available humanoid robots do not have human like link lengths or mass properties. These humanoid robots are presumed to have been developed with a focus on walking, which is a movement slower than running. When the angular velocities of joints are not very large, the angular momentum generated is not large and has little influence on the whole-body motion. Some researchers are interested in methods of generating stable motion during the stance phase. Sugihara et al. are developing stable control based on the momentum as a norm during walking exercises [
30]. Hyon et al. investigated a back-handspring motion with a multi-link robot and proposed motion planning considering global physical quantities such as the center of mass or angular momentum during the stance phase [
31]. On the other hand, during the flight phase, the angular momentum of the whole body of the robot cannot be modified. The upper body and legs are connected to the waist, where the movement of legs and an upper body are generated. It means that when the robot swings only its legs without active moving of the upper body joints during the flight phase, the waist and upper body rotate in yaw direction due to the angular momentum generated by the legs movement. As a result, when the direction of the waist deviates from the traveling direction, the robot cannot perform straight running. To solve it, humans move their upper body actively including arms for generating the angular momentum in opposite direction from that generated by the legs movement [
26,
27].
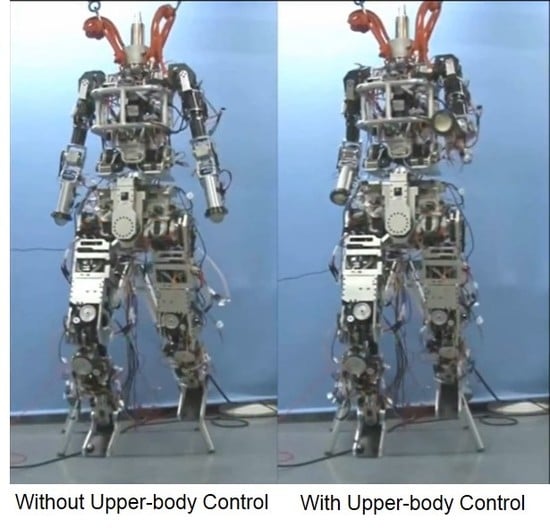
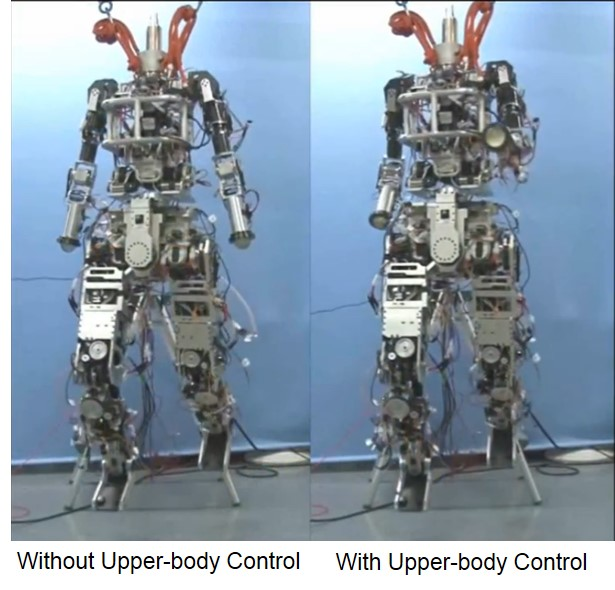
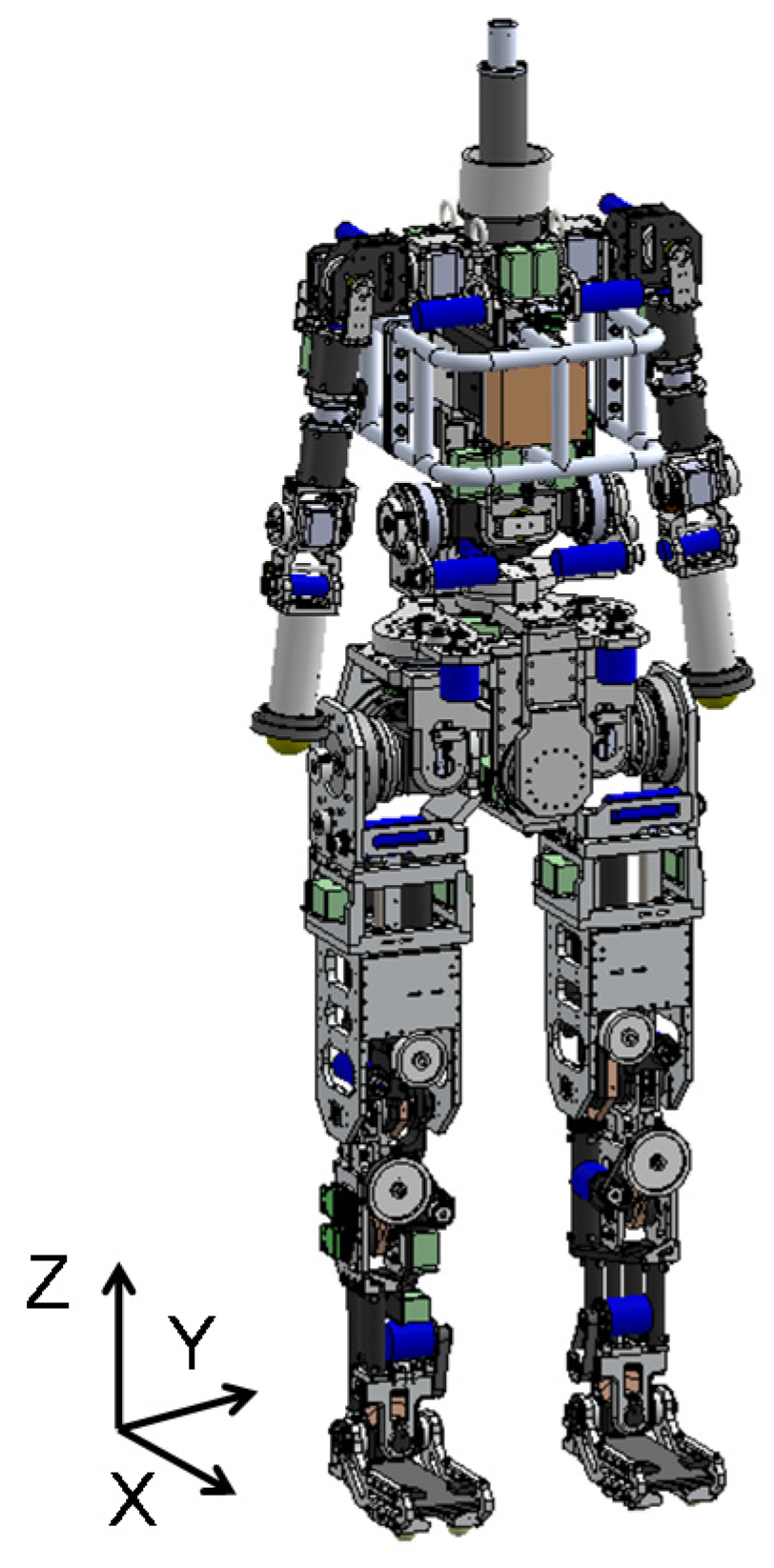
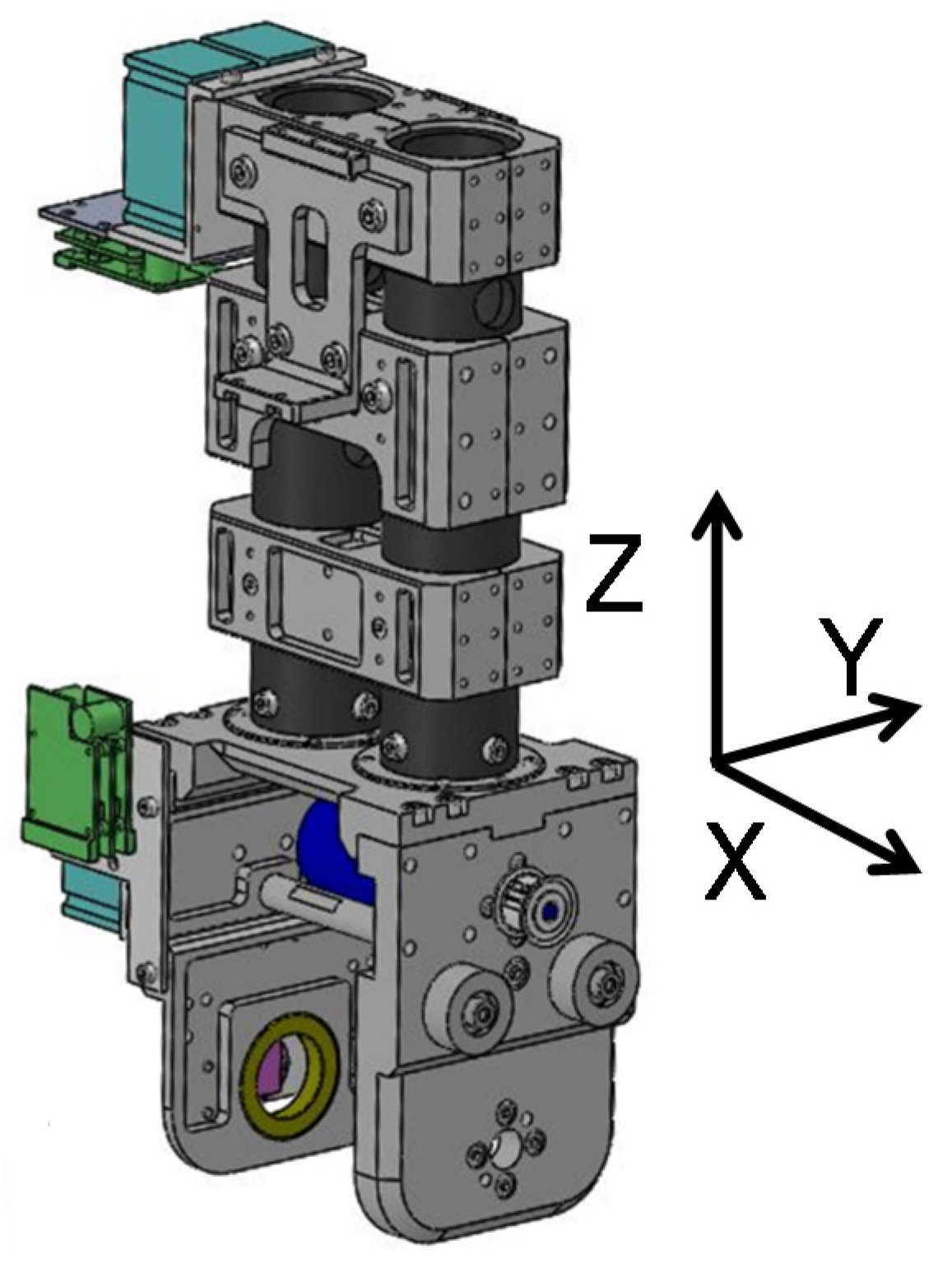
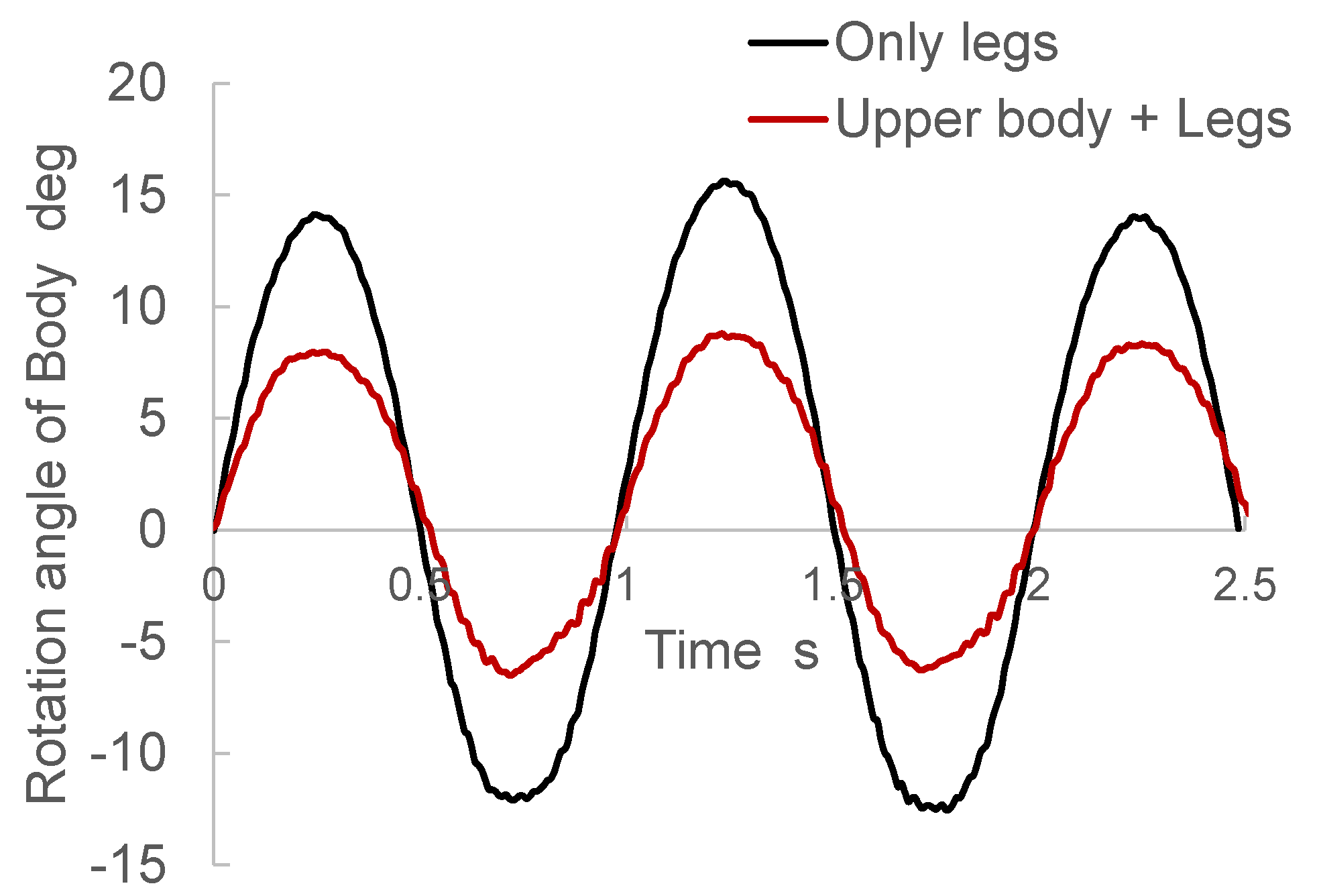
In this study, our focus is on the flight phase that occurs during the hopping or running motion of a robot, and we aimed to prevent rotation of the waist by aggressively generating angular momentum with the upper body equivalent to that generated by the legs during the flight phase. To this end, we propose an angular momentum compensation control method that uses the arms and torso inspired by the mechanisms of human running. Moreover, to realize the proposed method with a real humanoid, we developed an upper-body mechanism to mimic human link lengths and mass properties. We performed experiments with the robot that we developed to evaluate the proposed methods. We confirmed that the humanoid robot could compensate for the angular momentum in the yaw direction that is generated by lower-body movement in midair.
The remainder of this paper is organized as follows. In
Section 2, we describe the proposed method for compensating for angular momentum in the yaw direction and the design of the upper-body mechanism that mimics the human mass properties. In
Section 3, we present the experimental results. In
Section 4, we present a discussion. Finally, in
Section 5, we present our conclusions.
4. Discussion
In experiment 2, we could not perform a running experiment with the humanoid developed in this study because more work is required to develop methods for stabilization in the pitch and roll directions. During running, the vertical component of the ground reaction force can be up to 1800 N, which is much larger than the horizontal component of approximately 180 N [
37]. Therefore, the ground reaction force influences stabilization in the pitch and roll directions but not in the yaw direction. When the ground reaction force does not act in alignment with the COM of the humanoid, angular momentum is generated and the robot falls. To prevent this situation, some researchers have focused on stabilization in the pitch and roll directions by controlling the ground reaction force [
38,
39]. In contrast, in this study, we focused on yaw stabilization using the upper body, because the ground reaction force does not have a large influence on stabilization in the yaw direction.
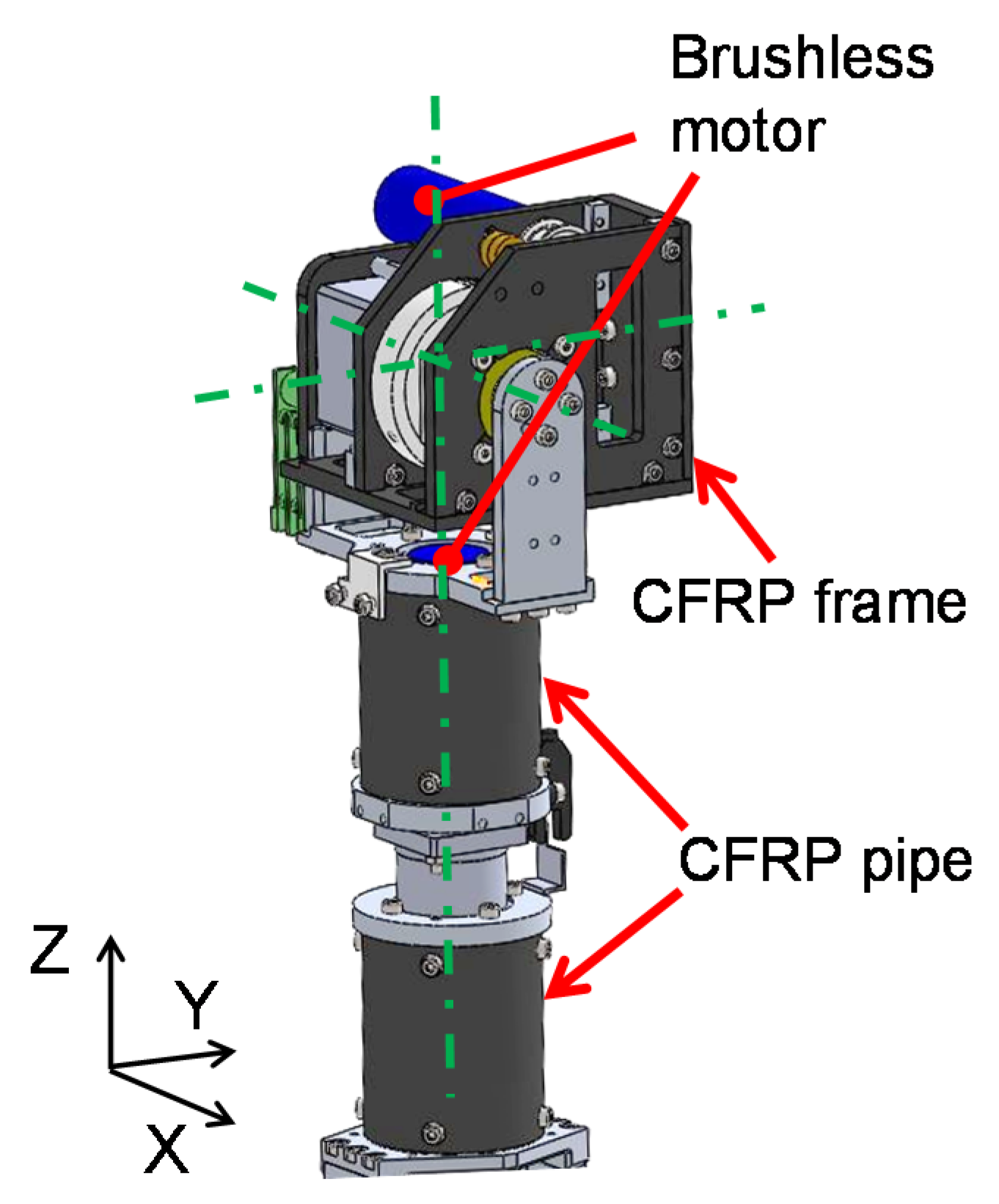
In this study, we designed an upper-body mechanism that has human-like link length and mass properties to achieve angular momentum compensation in the yaw direction during running. In experiment 1, we confirmed that the upper body could generate almost the same angular momentum as a human’s upper body during running. In addition, we calculated the angular momentum in the yaw direction with the 300 g lighter forearm. These results indicate that mass parameters have a large influence on the angular momentum generated during running. To achieve angular momentum compensation during running, it is important to incorporate the capacity of generating angular momentum in designing a humanoid robot. The upper body developed in this study was found to be able to perform fast movement as well as a human. This upper body will be useful in future research on effective sports movements such as ball throwing.
We propose in this paper an angular momentum compensation method using a humanoid upper body. This method can be used with other humanoid robots that do not have human-like mass properties. The reason for this is that the robot can calculate the angular momentum required using its mass property data and the control method developed. In addition, the control method can be applied to active turning by changing the angular momentum reference of the waist. In experiment 2, which involved running on a straight course, the angular momentum reference of the waist was set to zero.
In addition, we assume that the proposed method for stabilization in the yaw direction can be applied to stabilization in the pitch and roll directions with a change in the ground reaction force. In general, the upper body has a large mass and moment of inertia, and it can thus generate large angular momentum in the pitch, roll and yaw directions. The angular momentum generated by the ground reaction force can be compensated for by the upper-body motion. When the humanoid cannot effectively use its upper body, the humanoid should generate motion within a range that maintains the stabilization with only its legs and torso. By integrating these methods, the humanoid can perform faster and wider-ranging motions. In future work, we intend to apply the proposed method for stabilization to the pitch and roll directions. In addition, we will utilize the robot in the place of human subjects to confirm various running characteristics.
In summary, we found that the angular momentum compensation in the yaw direction using the upper body during the flight phase can improve the capability of humanoid hopping and running performance. Moreover, the upper body design should focus on the capability of generating angular momentum for rapid movement such as hopping and running. For stable running without constraints, the proposed method should be integrated with other control methods; however, humanoid robots will perform stable and faster motions by using the proposed methods, and the developed upper body will be useful in research about finding effective sport movements such as ball throwing.
5. Conclusions
In this paper, we propose an angular momentum compensation method to achieve angular momentum compensation in the yaw direction during the flight phase of running. The method is based on the human-running mechanism. To compensate for the angular momentum generated by lower-body movement during the flight phase, the angular momentum compensation method calculates the angular momentum and generates upper-body motion that activates the torso and arms, as in humans. The humanoid robot can thereby change its upper-body motion according to changes that occur in the lower-body motion, such as shifts in running speed. We also developed an upper-body mechanism that has the link and mass parameters similar to that of a human, and that can generate large angular momentum. We evaluated the developed upper body and noted that it could generate large angular momentum similar to that of humans. Furthermore, the minor differences in the link and mass parameters can significantly influence the capacity of generating angular momentum. Moreover, we confirmed that the humanoid robot could compensate for the angular momentum generated by the lower-body movement when the robot was suspended in midair.
The developed control method can contribute to improving the stability of humanoids that can perform dynamic movements including the flight phase, such as jumping, hopping and running. Because most other control methods for stabilization of the dynamic motion of humanoids focus on the stance phase, the developed method will be integrated without interference. However, using the developed control method requires the generation of large angular momentum by the upper body. To do that, the upper body design, which was not focused on in relevant studies, will also be changed to consider the mass, mass position, inertia matrix and link length for generating large angular momentum. Thanks to improved stability, humanoids will be able to advance into human living spaces and work stably.

 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}